
变螺距推进器设计与研究
2023-06-21 02:42张宏伟陈东源张玉鹏
天津大学学报(自然科学与工程技术版) 2023年8期
张宏伟,陈东源,张玉鹏,刘 珺
变螺距推进器设计与研究
张宏伟,陈东源,张玉鹏,刘 珺
(天津大学机械工程学院,天津 300350)
本文提出了一种采用螺距变化方式实现侧向力输出的水下航行器推进器方案.该推进器内部有主推电机、螺距控制电机及齿轮组,螺距控制轴与推进主轴同轴安装,通过对电机转速进行控制可以周期性地改变桨叶的螺距角,从而实现侧向力输出.采用计算流体动力学(CFD)方法对该推进器的水动力特性进行了研究,结果表明:采用正弦曲线的规律控制螺距角变化可以产生稳定的侧向力,侧向力曲线在桨盘极坐标下为圆形;平均侧向力方向与螺距控制初始相位方向一致;在螺距角变化幅值为9°的情况下,产生的平均侧向力大小约为40N.此外还仿真研究了侧向力、推力与螺距角变化幅值、转速的关系,结果表明:当螺距角变化采用正弦曲线时,推进器产生的平均侧向力与螺距角变化幅值及转速的平方成正比;而平均推力受螺距角变化幅值影响不大,与转速的平方成正比.将仿真结果应用于自主水下航行器(AUV)的动力学模型,验证装有此推进器的AUV的操纵情况.计算结果表明,当水下升潜和水平回转运动时,采用基于螺距控制的推进器可以实现良好的操纵效果.相较于传统的螺旋桨+舵的操纵方式,该方案结构简单、减少了电机数量、提升了AUV艉部空间利用率.与已有矢量推进方案相比,变螺距推进器具有结构简单、可靠性高、侧向力可控性好的优点.台架测试结果表明该变螺距原理能够实现桨叶螺距的周期调整,可用于实现AUV平台的矢量推进.
推进器;螺距变化;计算流体动力学仿真;运动学与动力学
随着国家对海洋资源开发和海洋权益重要性的认识不断提升,水下航行器技术得到了快速发展,应用也越来越广泛.水下航行器通常采用的推进与操纵方式有多推进器、推进器+舵、仿生推进、矢量推进等[1].
多推进器方式一般利用多个推进器结合控制系统实现对水下航行器多自由度的操纵[2],其优点是控制灵活、设计和制造方便,但推进效率不高,且影响水动力外形.仿生推进作为一个发展中的新方向,越来越受到重视,主要技术路线是将机械、电子、材料等学科与生物的游动原理相结合,改进AUV的操纵性[3].应用仿生推进技术的水下航行器噪音小、节能、操控灵活[4],但无法携带大载荷工作,目前还不能够成为主流推进方式.推进器+舵是目前AUV采用较多的一种操控方式,能够适用大多数的工况,但这种操纵方式在低速的情况下操纵效果不太理想.矢量推进方式通常有两种方式,一种通过机械结构改变推进器空间姿态从而实现推力的矢量化[5],有较好的低速操纵性,如Bluefin公司生产的矢量推进器.另一种通常采用偏心盘或自动倾斜器等机械结构来控制螺距在转动的过程中周期性变化,从而实现推力的矢量化[6],如文献[7-8]研究的采用多个伺服电机控制倾斜盘或偏心盘的偏转,通过多个连杆机构实现桨叶螺距的周期性变化,产生侧向操纵力,实现了水下航行器的无舵操纵.
通过控制推进器位姿或调速螺旋桨螺距可以实现矢量推力的输出,但通过机械结构实现偏转螺旋桨、通过偏心盘或自动倾斜器等实现水下航行器的无舵操纵设计成本相对较高,机械结构比较复杂,可靠性较差,同时艉部尺寸需求较大,也会增加阻力.为了简化机械结构,减小艉部尺寸,可以研究采用伺服电机实现桨叶螺距实时控制的方案.2018年,Paulos等[9]提出一种采用电机力矩控制实现无人机运动控制的方法,使螺旋桨通过一个专门设计的倾斜螺距铰链产生超前或滞后效果,从而周期性改变螺距,无需倾斜盘和空间铰链等复杂的机械结构,有效降低了设计成本及复杂性.Littlefiel等[10]提出采用单叶螺旋桨实现侧向力操纵的方案,利用伺服电机实现桨叶转速的周期变化,从而产生操纵力.
本文提出了一种采用螺距变化方式产生侧向操纵力的推进器方案,该方案将螺距控制轴与推进器主轴同轴安装,利用光电传感器实时跟踪推进主轴相位,控制桨叶在桨盘圆周上实现螺距角的实时与周期控制,产生侧向力,无须舵机和复杂的矢量机构,通过控制螺距角变化规律即可实现对侧向力的调整,操纵灵活、结构简单.建立了螺距角变化的控制规律,并从仿真方面分析了此推进器螺距角在正弦变化规律下水动力的特性.根据AUV运动学及动力学模型仿真预测了搭载此推进器的AUV竖直面升潜运动与水平回转运动情况.介绍了推进器实物及台架测试实验.
1 推进器总体设计
基于螺距控制的推进器结构简图如图1所示,该推进器采用两台伺服电机分别驱动螺旋桨转动(主推电机)和控制桨叶螺距(螺距控制电机).主推电机通过减速器连接推进主轴,可以带动螺旋桨转动.推进主轴为中空轴,螺距控制轴从主推电机的空心减速器及推进主轴中间穿过,由螺距控制电机驱动,经过1∶1的锥齿轮组后驱动桨叶轴.该结构方案采用空心减速机使得螺距控制电机可以与主推电机并行在舱内平行布局,有效减少了轴向长度,同时采用锥齿轮传动以适应尾部空间布局,保持了推进器的流线外形.推进器外观如图2所示.

图1 推进器结构简图

图2 推进器外观
当螺旋桨转速和桨叶调距轴的转速相同时,桨叶螺距为固定值不变,产生恒定轴向推力[11].当螺旋桨转速与调距轴速度不同,即调距轴转动相位超前或滞后于主推轴相位时,桨叶轴会绕自身轴转动,桨叶螺距将发生变化,一个桨叶的螺距角会增大,另一个桨叶螺距角减小.根据控制系统所要求输出的侧向力的大小和方向需求,在桨叶盘面圆周上,周期性地调整螺距角,可以产生稳定的侧向力输出.
推进器内部详细设计如图3所示.
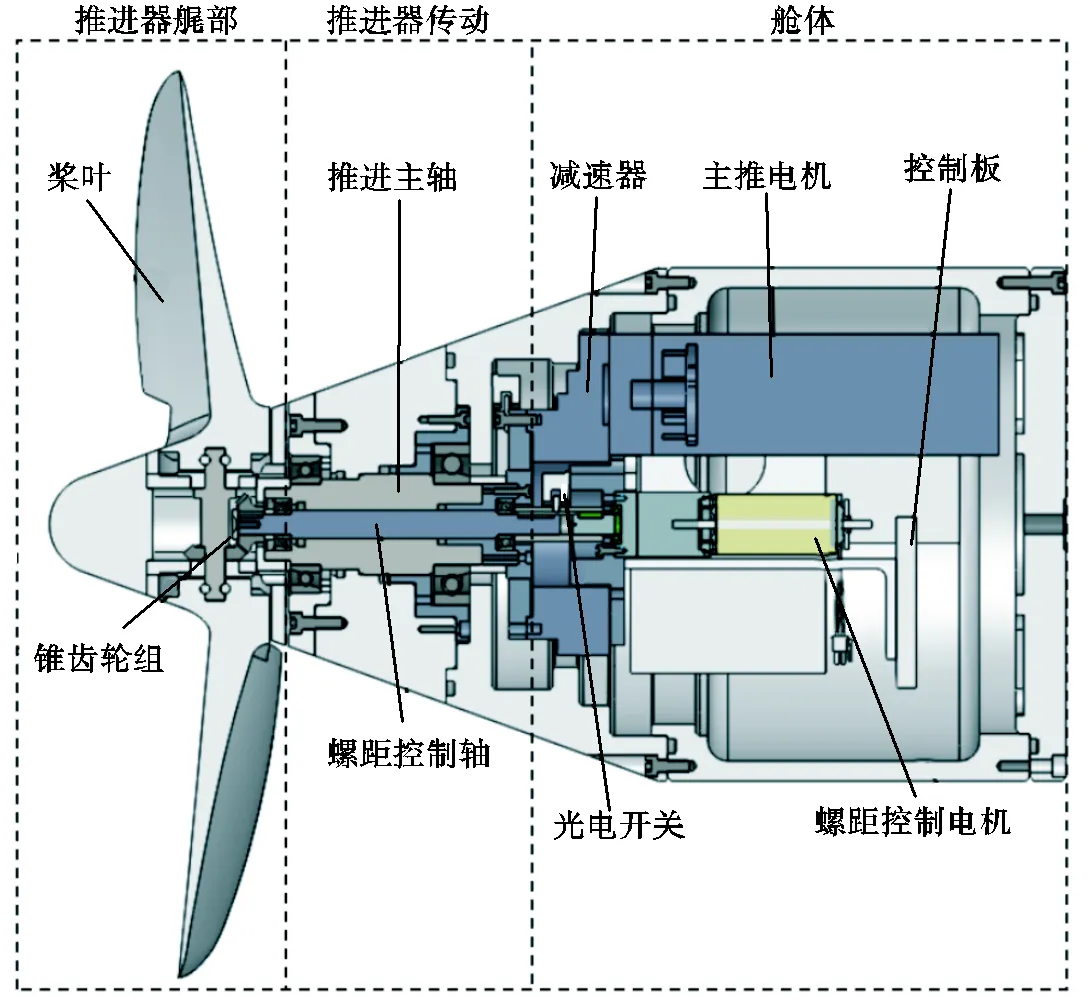
图3 推进器结构
采用麻省理工大学编写的螺旋桨设计程序Openprop对螺旋桨参数进行设计[12],桨叶模型如图4所示.

图4 桨叶模型
2 螺距控制分析
变螺距推进器通过螺距角的周期变化来产生侧向力,螺距角的变化规律有正弦变化规律、梯形变化规律、矩形变化规律等.

梯形变化规律相对于正弦变化规律来说,其螺距角变化过程不够平滑,对螺距角变化规律求导得到的螺距控制电机角速度变化规律不连续,容易造成调速过程中的冲击和振动.而矩形变化规律相对于梯形变化规律来说,变化过程更为剧烈,因此选用正弦曲线的螺距角变化规律.
3 螺距控制计算流体动力学仿真
3.1 计算域设置及网格划分
在ICEM中建立圆柱形计算域,直径为4,长度取为10,计算域整体网格如图6所示.为了获得更为可靠的结果,对螺旋桨附近区域进行网格加密,螺旋桨区域网格如图7所示,对于整体流域采用大网格[13],网格整体数量为100×104,采用Tetra/Mixed非结构化网格类型.

图6 动网格ICEM的网格

图7 桨叶附近网格
3.2 Fluent仿真分析
为了进行推进器变螺距过程的仿真,采用UDF函数定义螺旋桨的转动及变螺距过程,利用动网格进行瞬态仿真.由于此运动桨叶运动较复杂,网格边界运动范围较大,节点更新方法选择网格光顺法与网格重划分技术结合使用.运动过程中时间间隔过大会造成负体积,时间间隔过小会造成计算量过大,最终设置时间间隔为0.001s.
在桨叶设定的进速系数下,设置入口速度1.5m/s,螺旋桨转速250r/min,固定螺距时,推力仿真结果如图8所示,推力约为120N.
3.2.1 仿真方法验证算例
采用Fluent滑移网格的方法对此螺旋桨模型进行了不变螺距情况下的推力仿真,与动网格仿真方法的推力数值进行对比.滑移网格计算域设置时,入口速度设置为1.5m/s,在整体静止的静域内建立动域作为Mesh motion运动区域,转速设置为250r/min. 动域外表面设置为Interface交界面,桨叶在动域内.整体网格如图9所示,仿真结果如图10所示,不变螺距的情况下推力大小为123N,与动网格仿真的结果120N接近.

图8 不变螺距推力仿真

图9 滑移网格ICEM的网格

图10 滑移网格推力仿真
对实验室一款三叶螺旋桨采用动网格方法对推力进行仿真验证,该螺旋桨模型如图11所示,在航速为1.5m/s、转速为250r/min时推力为104N.仿真结果如图12所示,动网格仿真推力大小为100.4N,误差为3.4%.
图11 螺旋桨模型
通过滑移网格推力仿真验证与三叶螺旋桨推力验证,表明该动网格仿真方法过程可靠,结果具有可信度.

图12 推力仿真
3.2.2 螺距角正弦控制规律仿真
利用动网格方法对该推进器螺距控制的过程进行仿真,设置螺旋桨轴线水平放置,入口速度为1.5m/s,UDF设置螺旋桨转速为250r/min,因为Openprop设计螺旋桨在不变螺距的情况下,效率较高,因此螺距角变化不宜过大.同时在仿真的过程中,当螺距角变化幅值为9°时就可以产生比较理想的侧向力.因此这里设置螺距角变化幅值为9°.随着桨叶的旋转和螺距的变化,推进器同时产生推力与侧向力.推进器产生的推力如图13所示,平均推力约为120N.将一个周期内侧向力在桨盘极坐标平面上表示如图14所示,侧向力的平均值约为40N.

图13 变螺距推力仿真

图14 变螺距侧向力仿真
仿真结果表明,采用此螺距控制的方式可以产生稳定的侧向力,平均侧向力方向与螺距控制初始相位方向一致.此外,推进器的推力会随着螺距角的变化产生小幅度的周期性变化,但总体上对推力影响并不显著.
3.2.3 推力、侧向力与螺距角控制幅值关系仿真
对于此推进器,在正弦控制规律下,螺距角变化幅值作为侧向力主要控制量,对于整个螺旋桨的水动力性能有非常大的影响,有必要在不同的螺距角变化幅值下分析此推进器的水动力表现.本文分别在螺距角变化幅值为3°、4°、5°、6°、7°、8°、9°的情况下进行仿真分析.

图15 平均推力随螺距角控制幅值的变化

图16 平均侧向力随螺距角控制幅值变化
3.2.4 推力、侧向力与转速关系仿真
除了螺旋桨的螺距外,转速也是影响螺旋桨水动力的关键因素.设置推进器螺距角变化的正弦控制规律幅值为9°,对不同转速的推进器螺距控制过程进行水动力仿真分析,分析平均推力及平均侧向力随转速的变化.
由图17、图18可以看出,对相同的螺距变化规律来说,推进器平均推力与平均侧向力与转速的平方呈线性关系.

图17 平均推力随转速的变化

图18 平均侧向力随转速的变化
3.2.5 侧向力拟合
综合以上数据及分析,用Matlab拟合工具箱对平均侧向力进行拟合,在螺距角变化按照正弦规律下,此推进器平均侧向力拟合公式为

4 水下航行器运动仿真预测
4.1 运动学及动力学建模
此种推进器采用螺距控制产生侧向力和侧向力矩,通过改变螺距控制的初始相位即可产生不同方向的侧向力,达到水下航行器偏航、俯仰等操纵效果,进而可以实现对自治水下航行器(AUV)的运动控制.本节通过AUV运动学及动力学仿真验证此推进器的操纵效果.AUV主要参数如表1所示.
表1 AUV参数

Tab.1 Parameters of AUV


图19 坐标系建立
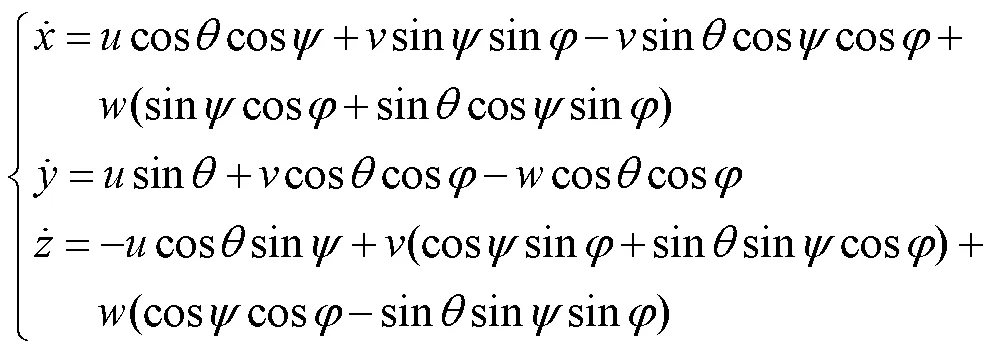
AUV的平动运动方程可以表示为
AUV的转动运动学方程为


基于装有此推进器AUV的动力学模型,可以运用四阶五级龙格-库塔数值计算方法在Matlab中预测其在典型运动方式下的操纵情况.
4.2 动力学模型验证
为了确保该模型预测的可靠性,利用实验室研制的矢量推进式AUV在天津于桥水库进行的水域实验数据进行了验证[15].将矢量推进器的推力沿轴向与横向分解,可得本文动力学模型所述的推力与侧向力.图20为AUV矢量推进器水平摆角为15°、航行速度为1.5m/s时所做的回转运动水域实验.动力学模型预测回转直径为30m,水域实验测得的AUV的转弯直径为29m,预测值与实验值吻合较好,表明该动力学模型可靠.

图20 水平回转实验
4.3 竖直面升潜运动仿真预测


图21 竖直面运动轨迹
4.4 水平回转运动仿真预测
PIAUV的水平运动主要包括直航和回转2个基本运动.当进行直航时,推进器不进行螺距控制,转速250r/min,产生的轴向推力为120N.当进行水平回转运动时,设置推进器螺距角变化幅值为9°,根据回转方向从初始螺距控制相位180°开始进行螺距控制,产生的侧向力大小为40N,方向偏向航向左侧.


图22 水平回转运动轨迹
5 推进器实物及台架测试
推进器工程样机如图23所示,对推进器的变螺距过程进行台架测试,利用电子凸轮技术实现螺距控制电机的速度正弦控制.
电子凸轮是模拟机械凸轮的一种智能控制软件系统,利用构造的凸轮曲线,使主轴与从轴实现设定的相对运动.推进器实验系统简图如图24所示,电子凸轮主轴为推进主轴,位置由主推电机的编码器反馈,从轴为螺距控制轴.实验时首先根据从轴相对主轴的变速需求建立凸轮曲线并离散化为二维凸轮表,通过上位机CME软件导入螺距控制电机驱动器中.在推进器变螺距运动实验过程中,主推电机驱动器通过读取编码器信号传递给螺距控制电机驱动器.电子凸轮根据凸轮表主从轴位置关系确定从轴即螺距控制轴目标控制位置,采用输出脉冲方式控制螺距轴实际位置,从而驱动螺距控制电机的转速周期性变化.

图23 推进器工程样机

图24 台架测试
当推进器基础转速设置为120r/min进行正弦规律的变螺距控制时,螺距控制电机(减速比1∶23)实验结果如图25所示.可以看出在推进器的变螺距实验过程中,螺距控制电机转速能够按正弦规律周期性变化,整体误差在可接受的范围内,该推进器设计方案可以通过控制螺距控制电机的转速从而初步实现螺距的周期性变化.

图25 台架测试实验结果
6 结 语
本文详述了一种基于变螺距原理的矢量推进器,该推进器将推进主轴与螺距控制轴同轴安装,通过伺服电机实时控制桨叶螺距,可调整螺距角变化规律实现侧向力的可控输出,具有操控性好、结构简单、可靠性高的特点.本文所设计的推进器结构针对双桨叶构型,对于其他数量桨叶的推进器,只要设计相应的结构实现对每一片桨叶进行相同的周期性螺距控制,同样可以实现侧向力的产生.台架测试结果表明该变螺距原理能够实现桨叶螺距的周期调整,可用于实现AUV平台的矢量推进.
通过计算流体动力学仿真对此推进器所产生操纵力的特性进行了研究,得出以下结论:采用正弦规律控制螺距角时,变螺距推进器可产生稳定的侧向力,侧向力曲线在桨盘极坐标下为圆形;平均侧向力方向与变螺距初始相位方向一致;在变螺距的过程中,推进器的推力基本保持稳定.
分析了变螺距推进器平均侧向力数值与螺距角变化幅值、转速之间的关系,分别在不同的螺距角变化幅值和不同的转速下对推进器的水动力性能进行了仿真,结果表明在仿真范围内,平均侧向力的大小与螺距角变化幅值呈正比,与转速的平方呈正比,通过调整变螺距推进器的螺距角变化幅值与转速即可调整侧向力.研究结果还表明采用改变螺距角变化幅值方式调整侧向力时,变螺距推进器的平均推力变化不大.与已有矢量推进方案相比,变螺距推进器设计方案具有结构简单、可靠性高、能线性调整侧向力而不损失推力的优点.
建立了装有此推进器的水下航行器的动力学模型,利用实验室海试数据验证了模型的可靠性,预测了水下航行器在两种典型工况下的运动,结果表明采用此推进器的AUV无需舵即可实现对AUV的运动控制.
[1] 张 帅,肖晶晶. 水下矢量推进器研究综述[J]. 舰船科学技术,2019,41(7):5-9.
Zhang Shuai,Xiao Jingjing. Research review of underwater vector thrusters[J]. Ship Science and Technology,2019,41(7):5-9(in Chinese).
[2] 黄 宇. 基于矢量推进AUV的航行体运动控制研究[D]. 北京:中国舰船研究院,2015.
Huang Yu. Research on Vehicle Motion Control Based on Vector Propulsion AUV[D]. Beijing:China Ship Research Institute,2015(in Chinese).
[3] 王田苗,杨兴帮,梁建宏. 中央鳍/对鳍推进模式的仿生自主水下机器人发展现状综述[J]. 机器人,2013,35(3):352-384.
Wang Tianmiao,Yang Xingbang,Liang Jianhong. Overview of the development status of bionic autonomous underwater vehicle with central fin/fin propulsion model[J]. Robot,2013,35(3):352-384(in Chinese).
[4] Sahoo A,Dwivedy S K,Robi P S. Advancements in the field of autonomous underwater vehicle[J]. Ocean Engineering,2019,181:145-160.
[5] Zhang Y,Yang K. Modeling and simulation of SAUV vectored thruster on dynamics[C]//2011 International Conference on Electrical and Control Engineering. Bandung,Indonesia,2011:1112-1116.
[6] 张传平. 水下机器人可调螺距螺旋桨的并联变距机构设计与运动性能研究[D]. 济南:山东大学,2018.
Zhang Chuanping. Design and Research on Motion Performance of Parallel Variable Pitch Mechanism of Controllable Pitch Propeller of Underwater Robot[D]. Jinan:Shandong University,2018(in Chinese).
[7] 常 欣,邹经湘,郭春雨,等. 全方向推进器叶片调距机构设计[J]. 船海工程,2007,36(3):20-23.
Chang Xin,Zou Jingxiang,Guo Chunyu,et al. Design of the pitch adjusting mechanism of all-directional propeller blade[J]. Ship and Sea Engineering,2007,36(3):20-23(in Chinese).
[8] 张宏伟,王福强. Delta型全方位推进器调距机构设计与分析[J]. 机械设计,2017,34(1):20-26.
Zhang Hongwei,Wang Fuqiang. Design and analysis of Delta-type omnidirectional propeller pitch adjustment mechanism[J]. Machine Design,2017,34(1):20-26(in Chinese).
[9] Paulos J,Yim M. Cyclic blade pitch control without a swashplate for small helicopters[J]. Journal of Guidance Control & Dynamics,2018,41(3):1-12.
[10] Littlefiel R H,Jaffre F,Kaeli J W. AUV propulsion and maneuvering by means of asymmetric thrust[C]//2018 IEEE/OES Autonomous Underwater Vehicle Workshop. Porto,Portugal,2018:1-6.
[11] 章锐彪,孙国杰. 基于CFD方法的调距桨水动力转叶力矩研究[J]. 船舶物资与市场,2019(1):30-31.
Zhang Ruibiao,Sun Guojie. Research on hydrodynamic torque of pitch control propeller based on CFD method [J]. Ship Materials & Market,2019(1):30-31(in Chinese).
[12] 李 龙. 考虑伴流场的无人自治水下航行器推进系统设计[D]. 天津:天津大学,2016.
Li Long. Design of Unmanned Autonomous Underwater Vehicle Propulsion System Considering Wake Field[D]. Tianjin:Tianjin University,2016(in Chinese).
[13] 王 亮. 船舶螺旋桨变参数水动力性能研究[D]. 大连:大连理工大学,2012.
Wang Liang. Research on Hydrodynamic Performance of Ship Propeller with Variable Parameters[D]. Dalian:Dalian University of Technology,2012(in Chinese).
[14] 张德雨. 负浮力水下旋翼机可行性研究与动力学特性分析[D]. 天津:天津大学,2018.
Zhang Deyu. Feasibility Study and Dynamic Characteristics Analysis of Negative Buoyancy Underwater Rotorcraft[D]. Tianjin:Tianjin University,2018(in Chinese).
[15] 王 玉,林秀桃,宋诗军,等. 矢量推进自主水下航行器动力学建模及仿真[J]. 天津大学学报(自然科学与工程技术版),2014,47(2):143-148.
Wang Yu,Lin Xiutao,Song Shijun,et al. Dynamic modeling and simulation of vector propulsion autonomous underwater vehicle[J]. Journal of Tianjin University(Science and Technology),2014,47(2):143-148(in Chinese).
Design and Research of Propeller Based on Variable Pitch
Zhang Hongwei,Chen Dongyuan,Zhang Yupeng,Liu Jun
(School of Mechanical Engineering,Tianjin University,Tianjin 300350,China)
A scheme of underwater robot propeller which used variable pitch to realize lateral force output is proposed. The propeller has a main thrust motor,a pitch control motor and a gearset inside,and the pitch control shaft is mounted coaxial with the propulsion spindle. By controlling the motor,the pitch angle of the blade can be controlled periodically to realize the lateral force output. The hydrodynamic characteristics of the propeller are studied by computational fluid dynamics(CFD)method,and the results show that the lateral force can be generated by using the rule of sine curve to control the change of pitch angle;the lateral force curve is circular under the polar coordinate of the propeller disk;the direction of average lateral force is consistent with the initial phase direction of variable pitch;and when the pitch angle change amplitude is 9°,the average lateral force generated is about 40N. In addition,the relationship between the lateral force,thrust,and the amplitude of pitch angle change,the rotation speed is also simulated. The results show that when the pitch angle change adopts a sine curve,the average lateral force generated by the propeller is proportional to the pitch angle change amplitude and the square of the rotational speed;and the generated average thrust is not greatly affected by the amplitude of the pitch angle change,which is proportional to the square of the speed. The simulation results are applied to the autonomous underwater vehicle(AUV)dynamics model to verify the control of the AUV equipped with this propeller. The calculation results show that the AUV using this propeller can achieve good maneuvering effects when diving,floating underwater and turning horizontally. Compared with the traditional propeller+rudder control mode,the structure is simple,the number of motors is reduced,and the utilization rate of AUV stern space is improved. Compared with the existing vector propulsion scheme,variable pitch propeller has the advantages of simple structure,high reliability and good lateral force controllability. Bench test shows that this variable pitch principle can realize the periodic adjustment of blade pitch and can be used to realize the vector propulsion of AUV platform.
propeller;variable pitch;computational fluid dynamics simulation;kinematics and dynamics
10.11784/tdxbz202205006
TK448.21
A
0493-2137(2023)08-0775-10
2022-05-06;
2022-06-06.
张宏伟(1976— ),男,博士,教授.Email:m_bigm@tju.edu.cn
张宏伟,zhanghongwei@tju.edu.cn.
国家重点研发计划资助项目(2019YFC0311701);中国工程院院地合作重大咨询项目(2021DFZD2).
the National Key Research and Development Program of China(No. 2019YFC0311701),the Major Consulting Project of Academy-Local Cooperation of Chinese Academy of Engineering(No. 2021DFZD2).
(责任编辑:王晓燕)
猜你喜欢
内江科技(2022年3期)2022-03-30
舰船科学技术(2021年12期)2021-03-29
固体火箭技术(2018年6期)2019-01-18
测控技术(2018年2期)2018-12-09
当代陕西(2018年12期)2018-08-04
机械工程师(2018年7期)2018-07-30
中国卫生标准管理(2015年4期)2016-01-14
学习月刊(2015年10期)2015-07-09
振动工程学报(2015年2期)2015-03-01
固体火箭技术(2014年3期)2014-03-15
