
电磁轴承自抗扰控制的抗扰能力
2023-07-03 00:59任正义尚一博张广军
储能科学与技术 2023年6期
李 斌,任正义,尚一博,张广军,刘 红,王 晨
(1空军工程大学,陕西 西安 710051;2哈尔滨工程大学,黑龙江 哈尔滨 150001)
电磁轴承作为现今高速转子系统领域兴起的一种无接触、零磨损的支承形式被广泛关注。至今,电磁轴承已经被应用于许多工程领域,如飞轮储能系统、高速机床和泵、离心机、航空航天等需要高转速支承、高精度的场合[1-5]。飞轮储能系统中电磁轴承的控制相较于机械轴承和超导磁悬浮轴承复杂得多,而控制系统中控制器的设计关系到转子的回转精度和支撑力等关键指标,是电磁轴承的核心,其性能和磁轴承的静、动态特性密切相关。
目前工程应用中,最广泛的控制策略仍是PID或是改进的PID 算法[6-14]。其中王忠博等[7]针对四自由度电磁轴承刚性转子系统进行平面转子模型等效简化后,设计了PID控制系统并提出了一种简单可行的PID 参数整定方法。李超等[8]综合模糊控制和PID 控制优点,设计了模糊PID 控制系统,实现了较好的控制效果。刘路等[9]提出了非线性PID 控制方法,并利用遗传算法进行参数整定,较好地改善了电磁轴承控制效果。
但是随着被控对象模型和工作环境越来越复杂,以及不确定的模型变化和干扰等因素,PID控制逐渐凸显出有较大未知扰动时,存在抗扰能力方面的不足。为此,Kandil 等[15]设计了线性控制器和二阶滑模控制器一同作用于电磁轴承系统,并对二阶滑模控制器设计了两种优化算法,对比传统控制器取得了较好的控制效果。张生光等[16]为了提高电磁轴承控制的鲁棒性,设计了线性二次型高斯(linear quadratic gaussian,LQG)控制器,并引入最小二乘(least mean square,LMS)算法,仿真结果表明,该方法有效抑制了转子系统的不平衡振动。
自抗扰控制器(auto-disturbance rejection control,ADRC)因其自身独特的“估计补偿”思想[17],无须知道干扰信号具体的模型,也可以很好地弥补PID控制抗干扰方面的不足。因为其自身特性,可以在非线性、系统耦合等情况下取得较好的控制效果,所以被广泛应用于火炮、风机和电机等各类工程[18-21]。李冰林等[22]提出了一种基于滑模自抗扰解耦控制的方法,不仅实现了对各自由度的解耦控制,而且提高了系统的抗干扰能力,但是滑模控制同时也增加了系统复杂性与硬件实现难度。朱熀秋等[23]针对三自由度混合磁轴承系统采用线性/非线性自抗扰切换控制方法对其进行解耦控制,实验和仿真结果表明该方法具有较好的控制鲁棒性和抗干扰能力。
本工作主要以10 kWh 级的飞轮储能项目中的磁悬浮转子系统的支承构件磁轴承为研究对象,针对PID控制方法抵抗较大干扰能力不足的问题,采用双闭环自抗扰控制方法[24],基于五自由度磁轴承-转子系统的基本结构,建立了单自由度磁轴承转子系统数学模型,设计了双闭环自抗扰控制系统,利用MATLAB 的Simulink 模块验证该方法的有效性,并通过对比不完全微分PID控制,验证其在抗扰动方面的优势。
1 建立数学模型
本研究对象为10 kWh 级飞轮储能系统的五自由度磁轴承-转子系统。该系统中的径向磁轴承为E型12磁极,每个方向磁极按照“S-N-S”的“一大两小”分布,其中大磁极的线圈匝数N是小磁极线圈匝数的2倍,如图1所示。
图2中虚线圆为转子平衡位置,其圆心为坐标系原点,y0为转子理想悬浮状态下的单边气隙。考虑理想状况下,采用如下假设进行建模:
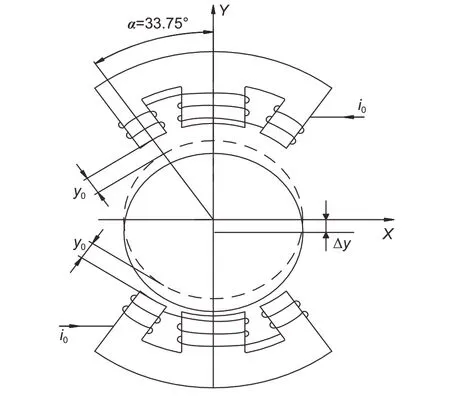
图2 转子运动位置示意图Fig.2 Schematic diagram of rotor movement position
(1)将转子视为单质点集中质量;
(2)忽略电磁轴承的绕组漏磁、铁芯的铁损以及线圈的铜耗;
(3)不计铁芯和转子中的磁阻大小,认为磁势理想均匀地分布在气隙间;
(4)定子铁芯内的磁通密度远远低于磁饱和点。
研究对象E 型磁轴承每组对称位置上的磁极组,都是以差动驱动模式共同作用来实现转子的稳态悬浮,其转子的偏移如图2所示,虚线代表转子轴处于理想平衡状态。由于铁芯中磁导率μ0≥1,所以在此计算过程中忽略铁芯的磁化作用。忽略X方向磁极组产生的电磁力对转子的影响,当转子在Y方向向下移动Δy时,为了能够使转子再次回复到理想位置,将功率放大器转换后的输出信号记为控制电流ic,则上磁极组输入的电流为i0+ic,下磁极组输入的电流为i0-ic。根据E 型电磁轴承“一大两小”的磁极分布和电磁力计算公式:
转子发生Δy的偏移时,磁轴承在静态理想工作点(Δy=0,ic=0)附近进行线性化处理(泰勒展开并忽略二次项以上的小量),则其电磁回复力为:
式中,ky为位移刚度系数,ki为电流刚度系数。
由牛顿第二定律可得其数学模型的动力学表达式如式(5)所示。
式中的x表示某个方向的位移。将式(5)的对象方程经过变形后得到

令y=x1,将被控对象方程转换为状态空间形式,可得其表达式为
2 自抗扰控制器的基本结构及算法
自抗扰技术的核心思想是实时估计并及时对外部扰动进行补偿。从其工作原理上来讲,自抗扰控制器就是利用TD、ESO 对控制对象的不确定因素,进行自动估计并给予补偿的非线性控制器。一个具有干扰跟踪补偿能力的自抗扰控制器的基本工作机理如图3所示,其中安排的过渡过程由跟踪微分器来实现。
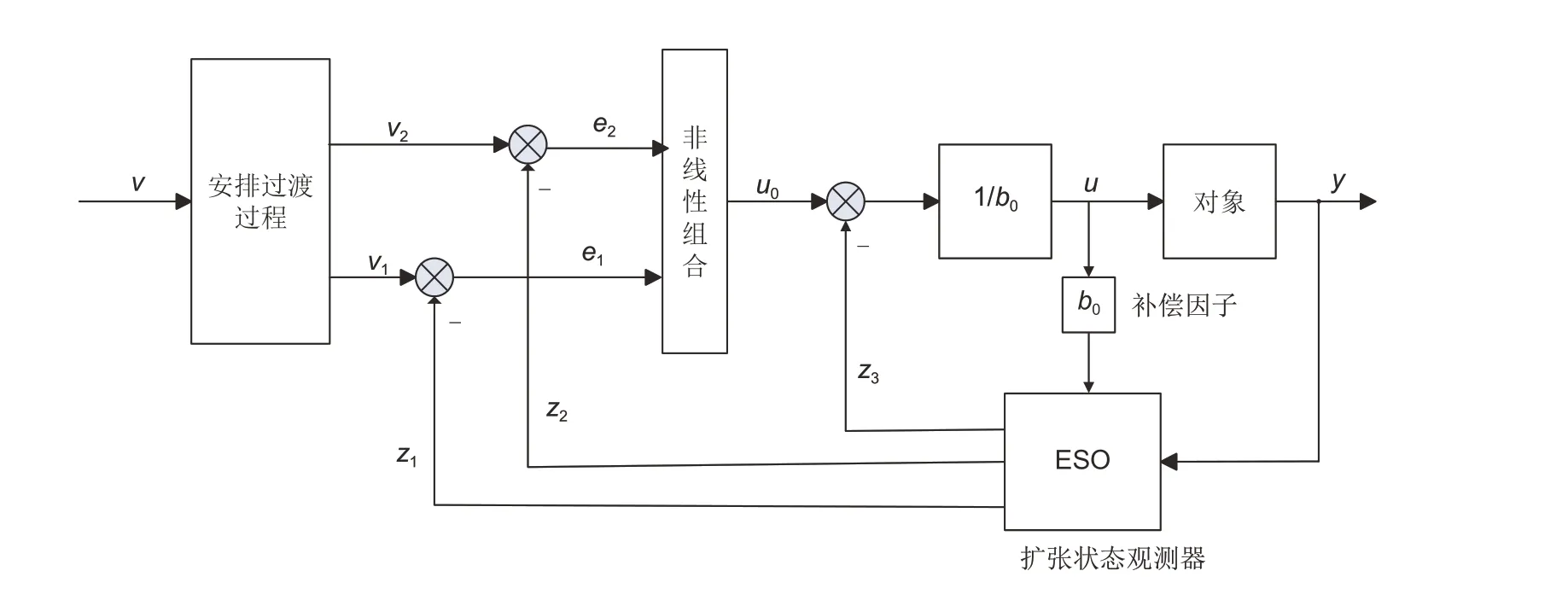
图3 自抗扰控制器结构图Fig.3 Structure of the ADRC
自抗扰控制相应的完整算法见式(8)~(11)[27]:
(1)安排过渡过程(跟踪输入信号并提取微分信号)
(2)扩张状态观测器(估计补偿扰动)
(3)状态误差反馈控制律
(4)生成控制量
3 控制系统的仿真
3.1 双闭环自抗扰控制系统仿真
电磁轴承在工作时会因铜损和铁损出现较为严重的发热现象,以至于线圈的电感和电阻值改变,导致电磁轴承的模型参数发生变化造成内部扰动。如果采取双闭环自抗扰控制器进行控制,即位置环加电流环,这样既可以保证磁极电流快速跟踪电压的实时变化,同时也可以保证位移及时地反馈调整。双闭环自抗扰控制器在单自由度磁轴承-转子系统中应用时的结构布局如图4所示。

图4 双闭环自抗扰控制器结构Fig.4 Structure of double closed-loop ADRC
本工作利用一个二阶ESO 观测控制电流和综合扰动,其算法的表达式见式(12)和式(13)。
其电流环的补偿律为
式中,u20(t)为补偿前电流环控制量,u2(t)为补偿后电流环控制量。
利用Simulink组件搭建单自由度磁轴承的双闭环自抗扰控制系统,其结构布局如图5所示。
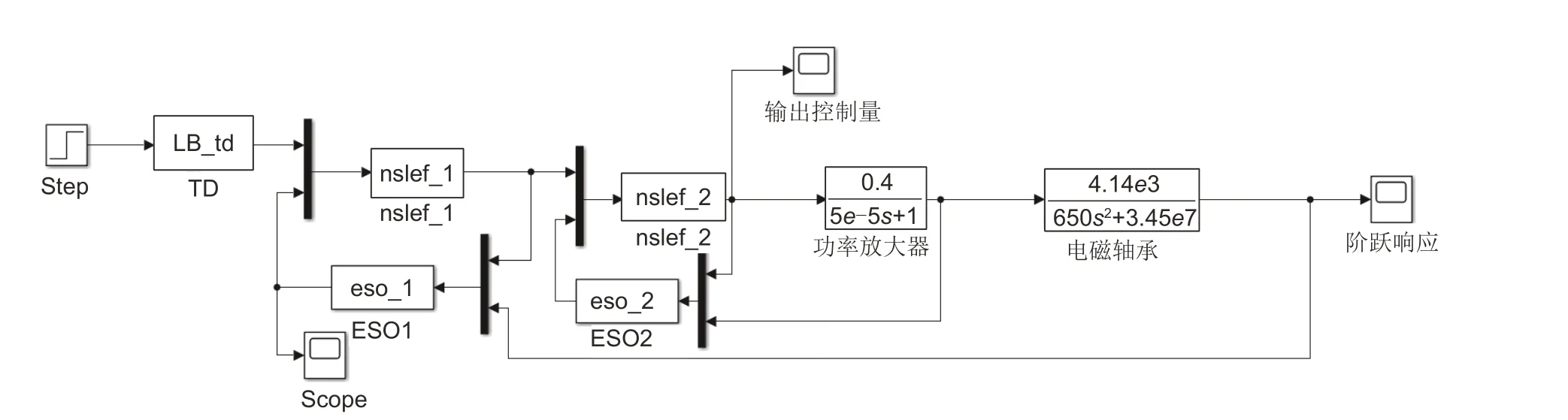
图5 双闭环自抗扰控制系统Fig.5 Double closed-loop ADRC system
设参考输入为单位阶跃信号,则系统的响应结果如图6所示。
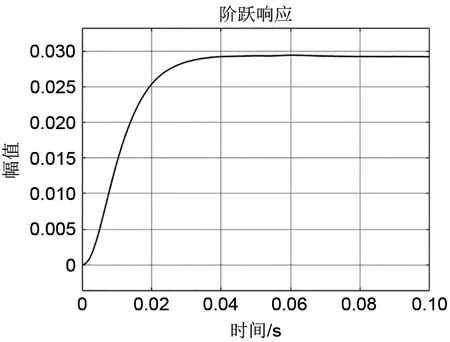
图6 双闭环ADRC系统阶跃响应Fig.6 Step response of a double closed-loop ADRC system
从图6中能够发现,双闭环ADRC系统的阶跃响应超调量约为4.5%,未超过稳态误差带(±5%),其上升时间约为24 ms,稳态幅值约为0.028,取允许误差带为±5%,则其调整时间约为30 ms。可见ADRC输出平稳,没有超调,且没有振荡,响应速度快。对比图7不完全微分PID控制的响应曲线可知,虽然ADRC 的阶跃响应时间比不完全微分PID长,但是ADRC在控制超调和稳态误差方面有明显优势。整定参数时发现,有的参数对系统响应的影响非常小甚至可以忽略。例如,整定电流环控制参数时,当kf和β2取值偏大或偏小都会引起系统阶跃响应出现幅值较大的振荡,尤其是参数β2。
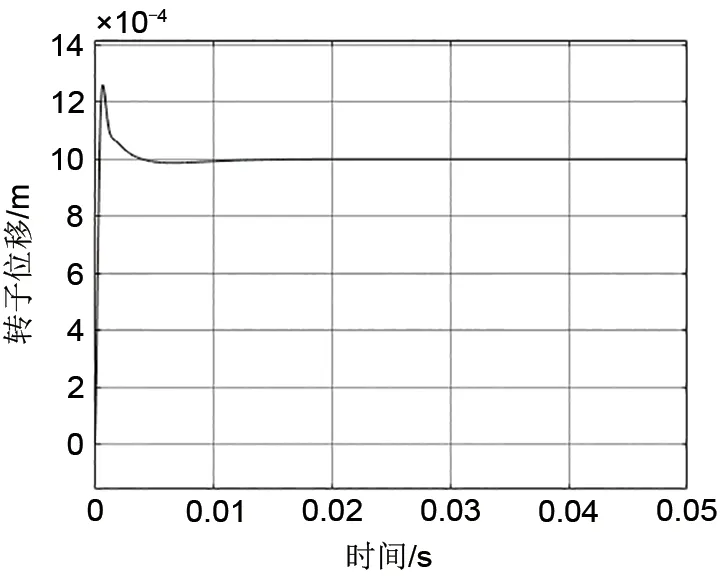
图7 不完全微分PID系统响应Fig.7 Incomplete differential PID system response
3.2 抗扰能力分析
为了验证自抗扰控制器对单自由度电磁轴承的抗扰效果,同时验证控制器可调参数是否正确,分别在输入信号、功放前端和控制对象前端三个不同位置,施加幅值为给定输入信号10%的三种干扰信号,其阶跃响应如图8所示。

图8 施加干扰前后的输出结果Fig.8 Output before and after interference is applied
从图8可以看出,双闭环ADRC控制系统的阶跃响应调节时间为28 ms 左右(幅值达到稳态值±5%),几乎没有超调,达到稳定后运行比较平稳,误差可以控制在±2%~±5%。而不完全微分PID控制的超调却高达30%左右,稳态误差最大为10%。由此可得,双闭环ADRC控制系统的抗扰能力明显优于不完全微分PID控制。
分别调整位置环和电流环的控制量系数b0和b1,对双闭环的ADRC系统进行鲁棒性实验,因为自抗扰控制方法是一种不依赖或弱依赖于控制对象模型的方法,而控制量系数的估计是其控制基础,系统模型发生变化会引起b的变化,进而可能引起控制性能恶化。b0为位置环的控制量系数,它的取值与磁极的等效电阻和负载的大小有关,而b1对b0的影响几乎可以忽略[18],所以在做系统对控制量系数的鲁棒性实验仿真时,只改变b0的大小,其他参数保持不变,观察其结果。当系统运行0.5 s后,在电磁轴承输出端施加阶跃信号(相当于负载),其仿真结果显示:当b0取值在0.5~10 之间时闭环系统能够稳定,但是调节时间较长且超调量随着b0减小而增大;当b0取值大于1时,随着b0值的增大,振动幅值愈来愈大,调节时间愈来愈长,如图9所示。

图9 取不同b0值时,突加负载的阶跃响应Fig.9 Step response of sudden load when different values are taken
由图9 可以看出,当b0小于1 时,随着b0增大,系统的阶跃响应调节时间延长,超调增大,且突加干扰(负载)时,出现幅值较大的低频振荡;当b0大于1时,随着b0增大,系统的阶跃响应调节时间增加,到达稳态之前振荡也越激烈,出现幅值相对较小的高频振荡,在突加干扰时,同样出现一定频率的振荡,再次稳定的时间也变长。稳定后幅值减小,有可能是随着b0增大,在突然施加负载时,激励引起的振荡频率超过一定值后,转子的振动幅值减小,如图9(c)和(d)所示。
因此,当系统控制量系数变化范围较大时,自抗扰控制器具有较强的鲁棒性,设计时控制量系数的估计在小范围内的误差是允许的。文献[24]也指出实验中的被控对象模型参数变化会影响参数b的变化,实验证明自抗扰控制器对被控对象数学模型的不确定性和模型参数的改变都有较好的鲁棒性。
4 结 论
本工作设计了双闭环自抗扰控制器,利用Simulink 对单自由度电磁轴承-转子系统进行了仿真分析,并且与不完全微分PID控制的仿真结果进行了对比分析。通过仿真方法得到以下结论。
(1)电磁轴承的自抗扰控制相比于不完全微分PID 控制,可以很好地将超调和稳态误差控制在±5%以内,前者的控制效果明显优于后者,但是在响应速度上,前者的调节时间是后者的6 倍左右。除此之外,自抗扰控制对对象模型和参数的变化具有很好的鲁棒性。
(2)在系统不同位置施加干扰,自抗扰控制系统的抗扰能力明显优于不完全微分PID控制,可以将超调和稳态误差控制在±3%左右,而且不需要知道具体的干扰模型,所以在滤波处理时比PID控制更简单。
猜你喜欢
防爆电机(2022年4期)2022-08-17
黑龙江大学自然科学学报(2021年4期)2021-11-19
防爆电机(2021年4期)2021-07-28
大电机技术(2021年2期)2021-07-21
数学物理学报(2021年2期)2021-06-09
数学物理学报(2019年5期)2019-11-29
天津教育·下(2018年9期)2018-07-13
水电与抽水蓄能(2018年1期)2018-03-07
广东技术师范大学学报(2016年5期)2016-08-22
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19
