
巨菌草扦插机扦插机构优化设计与试验*
2023-07-11 00:23郑邵秋张彩虹王国强
中国农机化学报 2023年6期
郑邵秋,张彩虹,王国强,
(1.新疆农业大学机电工程学院,乌鲁木齐市,830052;2.新疆农业科学院农业机械化研究所,乌鲁木齐市,830091)
0 引言
巨菌草作为一种用途广泛的作物,能为种植者提供良好经济收益。其茎叶可以用于畜牧饲料,也可用来培养菌类,为种植当地增加收入,其茎秆木质部晒干以后可以作为辅助燃料。目前国内种植的品种,是由福建农林大学林占熺等[1-2]1980年前后从非洲引进,经过多代选育而成。巨菌草在新疆地区的大面积引种有着深远的意义。南疆地区地广人稀,适合大面积机械化作业,所以巨菌草大面积引种需要先解决机械化种植的问题。根据巨菌草的生长特性将茎秆种苗扦插进地,很快就能发芽生长,因此考虑使用扦插机进行大面积扦插作业,从而快速在广阔南疆地区大面积推广种植。
目前国内外对于蔬菜栽植机、播种机、插秧机都有很深入的研究。国外Satpathy团队研究了影响栽植机作业的因素与作业指标,表明在栽植机作业中土壤含水率、机器作业速度与秧苗自身状况对作业效果有重要影响;而栽植合格率指标可以设置栽植角度、漏栽率、栽植深度等[3-4]。国内20世纪七八十年代就已经有一批农机专家致力于研究移栽机,如包春江团队于80年代就研制出了蔬菜移栽机;21世纪之初中国农业大学封俊团队[5]分析了吊杯式移栽机的运动轨迹,并给出了吊杯式移栽机的设计准则;赵匀团队[6-8]深入研究并尝试使用现代化设计理论和设计方法对水稻插秧机的研制工作进行革新,通过虚拟的仿真分析,甚至虚拟试验进一步缩短研发周期;俞高红等[9-10]对栽植机构中行星轮系的运动机理进行了仔细分析,并自主开发了一套可以人机交互的优化软件,可以方便对移栽机设计参数进一步优化改进。
本文基于南疆特殊土壤地貌特色对巨菌草扦插机的扦插机构、鸭嘴机构进行优化改进,并针对扦插机的具体工作情况,采用回归正交试验对巨菌草扦插机的关键参数进行优化,进而提高扦插合格率。
1 基本结构及工作原理
巨菌草扦插机的扦插基本结构如图1所示,主要是由机架、五连杆扦插机构、链轮、扦插鸭嘴机构、茎秆种苗旋转投苗钵盘等组成。
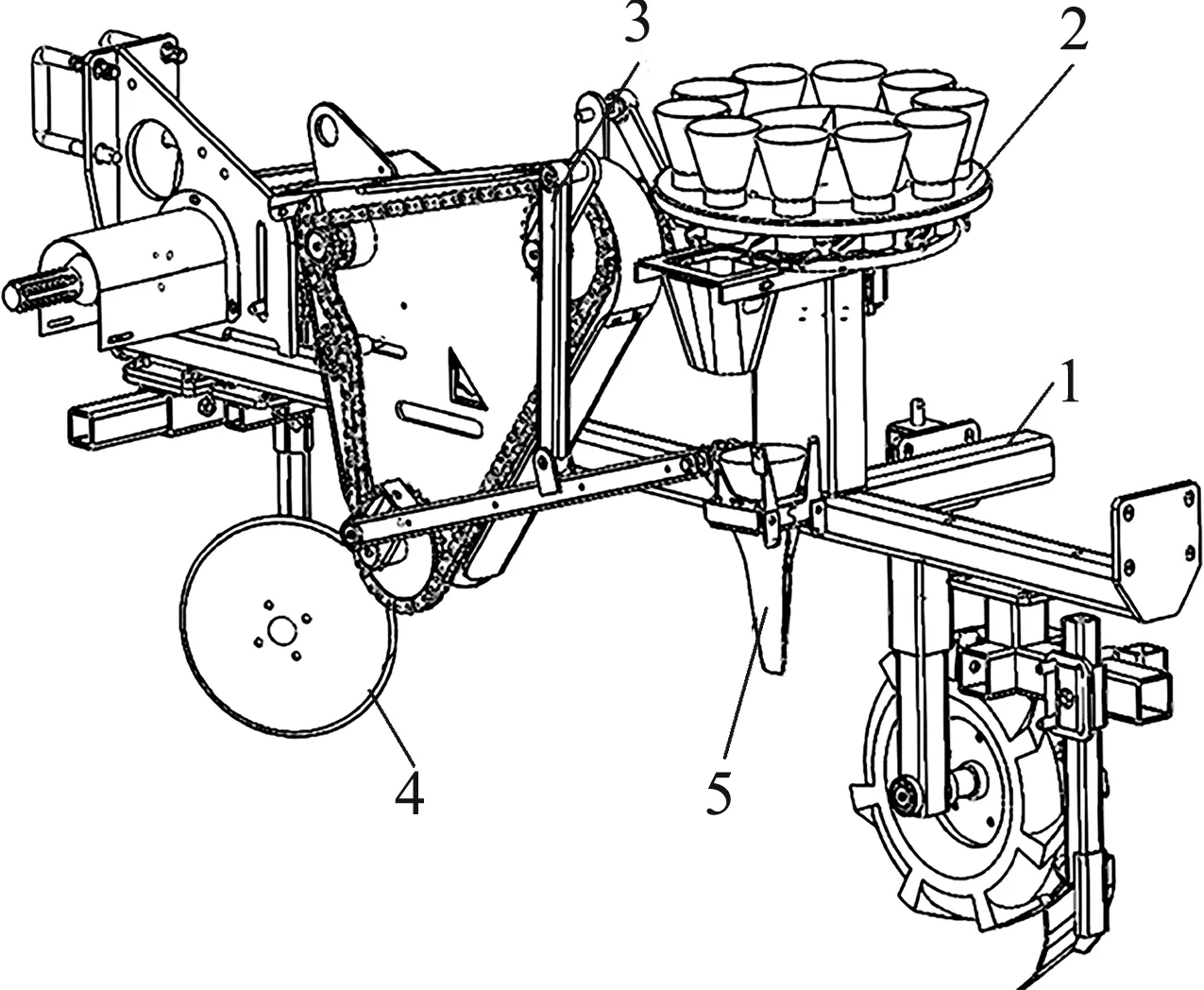
图1 扦插机结构图Fig.1 Structure diagram of transplanter1.机架 2.投苗机构 3.五连杆机构 4.覆土轮 5.扦插鸭嘴机构
巨菌草茎秆由人工放置在茎秆种苗旋转钵盘中,扦插机构是由链轮带动,而链轮动力由拖动扦插机的拖拉机提供,经动力输入杆输入齿轮箱调速后,输入主动链轮和与其同轴的凸轮,再由主动链轮带动从动链轮转动,进而与主动链轮同轴凸轮按其轮廓轨迹转动时,牵动着鸭嘴上控制张合的拉线的运动,通过拉线移动,控制鸭嘴两部分的张合。两曲柄以相同速度、相同的旋转方向带动后续连杆运动从而带动连杆末端鸭嘴往复运动,实现扦插动作。
2 关键结构设计
2.1 五连杆扦插机构
2.1.1 五连杆扦插机构工作原理及运动学模型
五连杆扦插机构运动简图如图2所示,该扦插机构分别由O、B两处两链轮带动两曲柄以相同速度、相同的旋转方向带动后续连杆运动,从而带动连杆末端鸭嘴往复运动,实现扦插动作。图2中五连杆扦插机构机架OB=l1,两曲柄OA=l2、BC=l3,连杆CG=l4、AD=l5、DE=l6、AG=l9、GD=l8,鸭嘴上下两部分,上半部分接苗防漏挡圈深度EH=l10,下半部分鸭嘴打穴器长度EF=l7,各对应夹角分别为θ1~θ8。

图2 扦插机构示意图Fig.2 Schematic diagram of the cuttings mechanism
以O为坐标原点,水平、竖直方向分别为x、y轴,由此建立五连杆扦插机构的运动学模型[11-15]。
A点位移方程
(1)
C点位移方程
(2)
矢量方程lOB+lBC+lCG=lOA+lAG
G点位移方程
(3)

(4)
(5)
将θ4代入式(3)求出θ5。
D点位移方程
(6)
E点位移方程
(7)
F点位移方程
(8)
对式(8)求一阶二阶导可以得到鸭嘴末端F点的速度v与加速度a。
H点位移方程
(9)
2.1.2 五连杆扦插机构约束条件与参数选定
如图2所示,为满足巨菌草扦插机中的五连杆扦插机构正常运转,进而带动鸭嘴提升至最高点处,使得鸭嘴上半部分茎秆(种苗)接入口的防漏挡圈处于茎秆(种苗)下落转盘式钵盘落苗处正下方,正好接住巨菌草茎秆(种苗);同时在状态Π整个扦插机构运转带动鸭嘴插入土壤打穴,满足巨菌草茎秆扦插深度范围50~70 mm,因此O点转动带动l2,转动至最低点时与地面高度为H1,此时鸭嘴扦插入土深度为H2。
综上整体高度
H=H1+H2+l1sinθ1+l2
参考市面扦插机参数结合扦插轨迹,扦插轨迹高度不低于300 mm,H初定600 mm。
结合鸭嘴部分的计算,l7=100 mm,l10=40 mm,鸭嘴扦插深度50~70 mm,暂定60 mm。同时为了避免O、B两处曲柄带动连杆运转时发生干涉,五连杆机构要时刻满足装配条件[16-19]。令X=max(l4,l9),Y=min(l4,l9)。
综上所述,最终确定各参数l1=480 mm,l2=46 mm,l3=135 mm,l4=320 mm,l5=350 mm,l6=240 mm,l7=100 mm,l10=40 mm,θ1=55°,θ2=55°,θ3=55°,θ4=235°,θ5=20°,θ7=90°。
2.1.3 五连杆扦插机构运动曲线
使用SolidWorks软件绘制巨菌草扦插机的扦插机构模型,并利用SolidWorks软件Simulation模块导出巨菌草扦插机扦插运动的运动曲线如图3所示。

图3 扦插机扦插轨迹Fig.3 Cutting track of cutting mechanism
2.2 扦插鸭嘴
2.2.1 扦插鸭嘴工作原理
扦插鸭嘴结构简图如图4所示,K处受力可以推动J处的旋转滑移,J、z两处高副可以旋转滑移,N、M两处不可滑移仅可以转动。Nz、Mz分别连接一半的鸭嘴Ⅰ、Ⅱ,∠JNz=β是固定角度,J处的转动滑移带动N、M两处转动∠MNz=α2=∠NMz=α3,最终z处的转动滑移,会造成鸭嘴Ⅰ、Ⅱ张开δ,完成鸭嘴在地面打穴,放入巨菌草茎秆的过程。

图4 扦插鸭嘴示意图Fig.4 Schematic diagram of the cut-duck mouth
2.2.2 扦插鸭嘴的改进
由于南疆土壤的特殊情况,巨菌草扦插机需要做出相应的优化改进,南疆土壤砂石比例高,粘连性差,土壤在含水率(土壤湿度)过低时,扦插种苗很难直立;含水率过高时,容易出现扦插打穴后在扦插鸭嘴上遗留大量土块不利于后续扦插作业。在保证合适的土壤湿度后,还需要解决尽量用较小的扦插鸭嘴张角打出适合扦插的孔洞。这就需要对扦插鸭嘴做一系列的优化改进。
用于扦插的巨菌草茎秆长度为80~120 mm,为了顺利从投苗钵盘接住扦插用的巨菌草茎秆(种苗),在尽量不伤害苗芽的同时考虑实际情况,鸭嘴扦插部分长度L取值范围应该在60~130 mm,鸭嘴扦插打出穴口直径范围20~30 mm,鸭嘴张角
鸭嘴张角δ范围为
式中:d——扦插穴口大小,mm。
将L与d的范围代入可以得到δ范围10°~30°。
结合实际试验中观察发现预设穴口直径过大不利于扦插直立,而预设穴口直径过小又不利于巨菌草茎秆顺利落入穴内,所以综合考虑在保证巨菌草茎秆可以顺利下落的情况下,尽可能选择小一些的穴口直径。利用Matlab软件遗传算法包对鸭嘴张角建立数学模型,分析L、d与δ之间的关系,可以得到图5、图6。
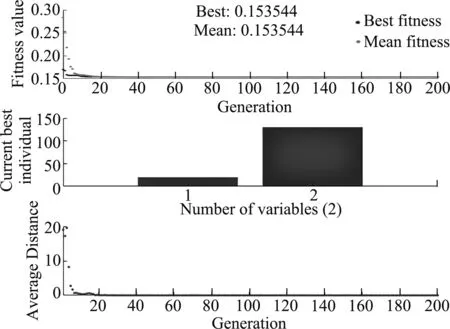
图5 遗传算法分析影响鸭嘴张角因素Fig.5 Genetic algorithm analyzes the angle factors of duck mouth

图6 鸭嘴机构函数曲面Fig.6 Duck mouth mechanism function surface
可以发现,鸭嘴长度尺寸L越大,越容易以相对较小的张角,打出更大的穴口大小。因此要在控制穴口不过大(保证茎秆扦插直立度)的同时保证茎秆可以从鸭嘴顺利落入穴中。综上,选取鸭嘴长度L=100 mm,鸭嘴大小与鸭嘴上半部分接苗防漏遮挡围圈长度L′=140 mm。再结合前面选定的穴口直径d的准则,代入计算δ。计算和结合实际考虑选取δ为20°。
由鸭嘴结构简化图4可知,∠KJN=α4,∠JNz=β,∠MNz=α2=∠NMz=α3,∠MzN=α1,SNM=S1,SMz=S3=SNz=S2,SJN=S4。
根据正弦定理,对鸭嘴结构分析可得

综上对ΔS3整理后发现该式中只有S1与α3两个变量,找到这两个变量的约束条件如下。
式中:S1~S4——鸭嘴机构结构简图各段长度,mm;
α1~α4——机构各段对应夹角,(°)。
将目标函数输入Matlab中,调用Matlab自带遗传算法包,分析影响因子对函数的影响,如图7所示。
再结合Matlab对目标函数分析绘制的目标函数三维曲面图8,可得S1越大对z处转动滑移高副影响越大,结合设计的实际需要,选取SMN=S1=60 mm,而对于α取值要尽量偏小,再结合实际情况选取∠MNz=α2=∠NMz=α3=10°,∠NzM=α1=160°。

图8 鸭嘴机构z点处目标函数曲面Fig.8 Target function surface at the duck beak mechanism point z
再继续对KJN部分分析,∠KJN=α4,SJN=S4,可以有以下计算
β-α3=α4
综上整理ΔS4可知整个函数仅β和h两个变量因素,找到这两个变量的约束条件如下。
式中:h——N点到KJ垂直距离,mm。
将目标函数输入Matlab中,调用Matlab自带遗传算法包,分析两个影响因子对函数的影响,如图9所示。

图9 遗传算法分析鸭嘴机构J点处参数Fig.9 Genetic algorithm analyzes the parameters at the point J of the duck mouth mechanism
再结合Matlab对目标函数分析绘制的目标函数三维曲面图10,可得h越大对J处转动滑移高副影响越大,结合设计的实际需要,选取h=20 mm,而对于α取值应在结合实际情况的基础之上尽量取小一些,本文取∠KJN=α4=15°。

图10 鸭嘴机构J点处目标函数曲面Fig.10 Target function surface at point J of the duck beak mechanism
综上,可以对鸭嘴张开方式做出调整,进一步减小了β值由P处直接用拉线的方式让鸭嘴Ⅰ、Ⅱ张开δ,示意图如图11所示。

图11 改进鸭嘴机构示意图Fig.11 Schematic diagram of the improved duck mouth mechanism
3 仿真分析
3.1 EDEM扦插鸭嘴土壤扦插仿真
扦插机鸭嘴模型利用SolidWorks2019建立,并将扦插机鸭嘴模型另存为.igs格式文件。建立尺寸(长×宽×厚)为500 mm×500 mm×100 mm的土壤颗粒模型,其中土壤颗粒选取半径为5 mm的球体,通过Particle Factory(颗粒工厂)建立土壤模型,选用颗粒数量50 000个,生成速度z轴负向5 m/s,生成速率50 000个/s,仿真步长2.44 772×10-5s,记录数据时间间隔0.01 s。利用EDEM仿真扦插机鸭嘴扦插土壤时,扦插机鸭嘴与土壤颗粒以及土壤颗粒间受力状况。依据扦插机鸭嘴扦插过程中土壤与土壤、土壤与扦插机鸭嘴的相互作用及运动规律,选取相关作用参数如表1所示[20]。根据土壤颗粒间的相互作用,设置土壤颗粒与土壤颗粒接触模型为Hertz-Mindlin with JKR(Bonding),黏结能量设置为10 J。设置土壤颗粒之间黏结力能够准确地模拟出土壤黏结。土壤与扦插机鸭嘴接触模型选择Hertz-Mindlin(no-slip)。根据具体实际情况,扦插机鸭嘴扦插速度为0.02 m/s,混合时间步选定为20%,仿真时长选择3 s,仿真模型如图12所示。
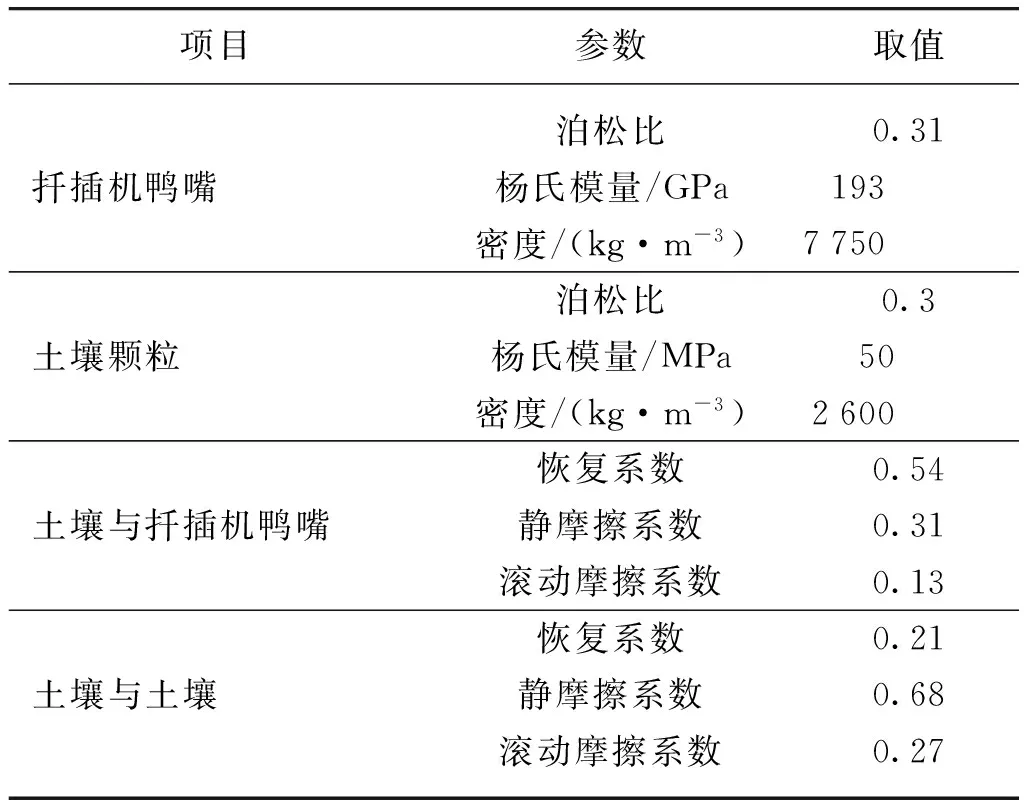
表1 仿真模型参数Tab.1 Simulation model parameters

图12 鸭嘴扦插土壤仿真Fig.12 Soil simulation of duck mouth cuttings
利用EDEM后处理模块提取扦插机鸭嘴扦插过程的土壤所受压力数据如图13所示,扦插机鸭嘴扦插土壤所受载荷随着时间的推移,由0开始逐渐增大,其中,压力值的变化范围为0~7.932 kPa。

图13 鸭嘴扦插土壤所受载荷仿真数据Fig.13 Simulation data of loading on duck-bill cutting soil
3.2 ANSYS静应力仿真模拟
扦插机鸭嘴模型利用SolidWorks2019建立,并将扦插机鸭嘴模型另存为.parasolid.x.t格式文件。导入ANSYS/Workbench软件中,应用软件对扦插机鸭嘴进行静力学分析。选取的不锈钢材料属性如表2所示,泊松比为0.31,选定材料密度7 750 kg/m2,弹性模量193 GPa,屈服强度200 MPa[21-22]。对模型进行网格划分,设定模型节点数21 035,划分网格数为13 023,设定好固定约束(限制鸭嘴张口上方支架各方向上的自由度,将鸭嘴固定),结合EDEM软件仿真扦插过程中,所受载荷最大为8 kPa;在ANSYS中在鸭嘴两片张口外表面上施加8 kPa载荷,扦插机鸭嘴的有限元静应力分析模型如图14所示,可见鸭嘴的末端破土处承受载荷最大,形变也最大,整个鸭嘴破土打穴张口承受载荷部位,承受载荷在0~2.4 MPa之间,而所选不锈钢材料在22 ℃下的压缩屈服强度为200 MPa。综上优化后的扦插机鸭嘴理论上满足使用要求,适合田间作业。

表2 扦插机鸭嘴材料参数Tab.2 Material parameters of cuttings
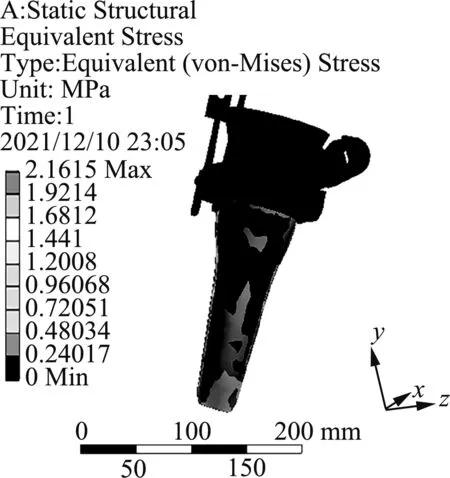
图14 鸭嘴承受载荷静应力仿真分析Fig.14 Simulation analysis of duck nozzle bearing load static stress
4 试验与结果分析
4.1 试验材料与方法
4.1.1 试验材料与试验设备
试验材料选用8~12 cm巨菌草茎秆种苗。试验仪器主要有巨菌草扦插机试验样机、电子式游标卡尺、电子量角器、温湿度测量装置。
4.1.2 试验方法
2021年9月在新疆农业科学院农业机械化研究所的南疆土壤地块开展回归试验,通过Design Expert软件进行回归分析并建立回归模型,通过显著性与响应曲面分析找出最佳模型,从中确定试验因素与试验指标的回归方程,最后通过回归方程求极值的方法确定扦插深度、扦插频率以及土壤湿度的最佳值,并对参数的最佳值进行试验验证。试验因素有扦插深度、扦插频率以及土壤湿度三项[23-24],根据JB/T 10291—2013《旱地栽植机械》[25-26]进行巨菌草种苗扦插试验,选择栽植合格率(扦插茎秆直立程度)为试验指标。试验采用三因素五水平中心组合试验方法[27-28]。
4.2 试验因素与水平
巨菌草茎秆扦插的3个试验因素:扦插深度为40~60 mm;土壤湿度为25%~65%;扦插频率为40~60株/min。本次回归试验,共20组试验,每组试验进行5次,每次试验结果取平均值,因素取值表如表3所示。

表3 试验因素编码Tab.3 Coding of test factors
4.3 试验指标
扦插合格率(扦插后茎秆种苗直立程度)为试验指标,测量扦插后茎秆种苗直立程度,茎秆扦插完全竖直是90°,扦插倾斜夹角在0°~90°范围之间,扦插倾斜夹角越小,扦插茎秆竖直程度越高,分值评定对照表如表4所示。扦插倾斜夹角大于50°就判定为不合格,漏插、未插直接不合格,每组试验结束后统计合格株数,扦插合格率为一组试验中扦插合格株数占该组试验扦插总株数比值。

表4 分值评定对照表Tab.4 Score evaluation comparison table
4.4 试验方案与试验结果
对三因素五水平中心组合试验,试验方案与试验结果如表5所示,X1、X2、X3为因素编码值。

表5 试验方案与试验结果Tab.5 Test programme and test results
使用Design Expert 10软件对表5中的试验结果数据进行回归拟合,建立扦插深度、土壤湿度、扦插频率和扦插合格率的回归方程为
Y=93.61+4.96X1+5.75X2+0.16X3-
0.062X1X2+0.013X1X3-0.037X2X3-
8.52X12-13.46X22-2.82X32
由表6中显著性检验结果得到模型的F=7.16,同时显著性概率P=0.002 5,显然P<0.01。因此由该回归模型所建立的回归方程拟合度显著,并且有意义。

表6 方差及显著性分析结果Tab.6 Regression coefficient and significance test results
由表6可知,扦插频率、土壤湿度与扦插频率的交互项、扦插深度与扦插频率的交互项、扦插深度与土壤湿度的交互项、扦插频率的二次项P>0.05,说明影响均不显著。扦插深度、土壤湿度以及它们的二次项0.01
Y=93.61+4.96X1+5.75X2-8.52X12-
13.46X22
4.5 响应面优化
结合表6中各试验因素的F值,确定了影响扦插合格率的主次因素依次为X2、X1、X22、X12、X32、X3、X2X3、X1X2,并绘制各因素对扦插合格率影响的响应曲面图(图15)。

(a) 土壤湿度与扦插深度
从图15可以看出,当扦插频率一定时,扦插合格率随土壤湿度的增加呈先上升后下降的趋势;同时扦插合格率随扦插深度的增加呈先上升后下降的趋势。当土壤湿度一定时,扦插合格率随扦插频率的增加呈先上升后下降的趋势;同时扦插合格率随扦插深度的增加呈先上升后下降的趋势。当扦插深度一定时,扦插合格率随扦插频率的增加呈先上升后下降的趋势;同时扦插合格率随土壤湿度的增加呈先上升后下降的趋势。但是明显扦插频率对扦插合格率的影响不太显著。根据回归方程与响应面曲面图显示趋势,再结合实际扦插机作业情况选取合适的数值,扦插深度X1=50 mm,土壤湿度X2=45%,扦插频率X3=51株/min。
4.6 试验验证
为验证优化后的巨菌草扦插机的实际扦插效果,选取最佳试验参数,以扦插后扦插巨菌草茎秆种苗直立程度作为扦插合格率,进行5次扦插试验,结果见表7。

表7 验证试验结果Tab.7 Validate the test results
试验结果表明:改进后的巨菌草扦插机的扦插合格率达到了87.5%以上,平均扦插合格率为92%,完全能够满足巨菌草大面积机械化扦插推广的要求。
4.7 对照试验
2021年9月期间,在新疆农业科学院农业机械化研究所的南疆土壤地块,开展对照试验。将未优化的扦插试验样机与经过优化扦插机构的试验样机在相同试验环境下,先后分别扦插80株巨菌草茎秆种苗,对比前后扦插合格率。
通过在相同最优试验因素水平:扦插深度50 mm,土壤湿度45%,扦插频率51株/min情况下进行试验。对比优化前后巨菌草扦插机扦插合格率如表8所示。从表8可以看出,优化后的巨菌草扦插机扦插合格率提高了3.75%。

表8 优化前后扦插合格率对照表Tab.8 Control table of cutting qualified rate before and after optimization
5 结论
1) 本文结合前期对于巨菌草茎秆种苗扦插农艺分析与茎秆力学特性的研究,针对目前存在的问题并结合实际南疆土壤特色,对巨菌草扦插机的关键扦插机构做了优化,通过对机构数学建模,分析目标函数最优取值;对鸭嘴机构、连杆机构,针对实际需要做出相应的优化,通过计算并结合实际考虑选取鸭嘴张角20°,鸭嘴大小为100 mm,连杆机构各杆件尺寸分别选取l1=480 mm,l2=46 mm,l3=135 mm,l4=320 mm,l5=350 mm,l6=240 mm。
2) 借助Design Expert软件对回归试验进行回归分析,确定了巨菌草扦插机扦插效果的三个试验因素参数的最优组合:扦插深度50 mm、土壤湿度45%、扦插频率51株/min。最终在验证试验中,巨菌草扦插机的扦插合格率达到了87.5%以上,平均扦插合格率为92%,完全能够满足巨菌草大面积机械化扦插推广的要求。
猜你喜欢
发明与创新·中学生(2023年5期)2023-04-20
科技创新与品牌(2022年8期)2022-02-19
河北农机(2021年11期)2021-11-29
天津农林科技(2020年3期)2020-08-13
孩子·小学版(2019年11期)2019-09-10
电子制作(2019年15期)2019-08-27
农业机械学报(2018年11期)2018-12-04
现代园艺(2017年23期)2018-01-18
农业机械学报(2017年9期)2017-10-11
高原山地气象研究(2016年4期)2016-02-28
