
基于MRAS的带式输送机PMSM无传感器系统研究
2023-08-10 06:51杨京东李大伟杜贤弈任丽霜
山西煤炭 2023年2期
杨京东,李大伟,杜贤弈,吴 康,任丽霜
(山西大同大学 煤炭工程学院,山西 大同 037003)
矿用带式输送机是一种被广泛应用于矿山生产中的持续性运输机械。现代带式输送机的驱动装置主要由异步电机和减速器构成,并安装机械传感器检测电机转子数据[1]。由于前端来料的不确定性及后端的大余量设计,带式输送机通常都不会全负荷运行,而异步电机在低速轻载时功率因素降低,对电网安全经济运行不利。随着稀土材料价格走低,永磁体制造工艺不断成熟,永磁同步电机越来越受到国内外学者的重视。由于永磁同步电机(PMSM)相比异步电机具有损耗小、构造简单、效率高、适合广范围调速以及功率密度大等优点[2],且在低速运行时性能良好,无需增加减速器,因此PMSM应用于矿用皮带输送机将更加安全、经济、高效。
矿用带式输送机的工作环境具有粉尘较多和抖动较大等不可避免的情况,机械传感器往往会因机械运行造成异常甚至损毁,既增大了安装和维护成本,又使驱动系统受到不良干扰,使得整个系统的稳定性降低[3]。因此,通过无速度传感器控制方式对PMSM的电流或电压采样,可以间接或直接得到转子位置,增强运行稳定性,缩减机械成本,并使系统对不同工况的兼容性更强,无速度传感器控制方式已经成为控制PMSM的主流发展趋势[4]。
目前,PMSM无速度传感器的控制方式主要有两大类,即基于基波数学模型控制和基于凸极特性控制[5]。文献[6]运用滑模观测器,在切换过程中容易造成转矩脉动过大,影响电机的可靠性。文献[7]运用直接转矩控制,其响应速度快,但存在较大的磁链和转矩脉动,且逆变器开关频率不恒定。文献[8]运用卡尔曼滤波器,但电机在实际应用中的运行曲线是非线性的,计算上使用的是协方差矩阵,这在运算过程中更耗时,并且需要更复杂的算法。文献[9]采用磁链估计法,其算法简单但依赖电机参数,无法在电机参数随着工况变化而变化的情况下应用。文献[10]运用三次谐波反电动势法,其限制较多,若无法从电机内部引出中性点或三次谐波分量很小时,均无法应用该方法。而模型参考自适应系统(MRAS)算法具有抗干扰能力强、稳态精度高、能保证参数估计的渐进收敛性等优点,具有一定的研究意义。
1 MRAS算法的基本原理


图1 MRAS并联型结构Fig.1 MRAS parallel structure
要想使MRAS系统获得高性能、高精度且优良的控制效果,关键在于构建与系统相匹配的自适应率。通常采用以下3种方法来设计参数自适应率:①以局部参数最优化理论为基础,使可调模型快速逼近参考模型,但该方法计算量大、耗时长、系统响应慢;②以Lyapunvo稳定性理论为基础构建自适应率,该方法可提高系统的稳定性,但是涉及的函数多且繁杂,没有确定的形式,实际应用相对困难;③以Popov超稳定性理论为基础,利用逆向求解不等式构建自适应律,公式过程简单,原理易懂,应用较为广泛。因此本文采用以Popov超稳定性理论为基础的设计方法,来构建MRAS系统的参数自适应率。
2 参考模型与可调模型的确定
PMSM在d-q坐标系下的电压方程为:
(1)
式中:ud、uq为d、q轴的电压,V;id、iq为d、q轴的电流,A;Ld、Lq分别为d、q轴的电感,H;R为定子电阻,Ω;ωe为转子角速度,rad/s;Φf为永磁体磁通,Wb;Ls为定子电感,H;t为时间,s。
为了便于分析,将该式写成电流方程的形式:
(2)
将式(2)中PMSM的电流模型化简,可表示为:
(3)
(4)
可以看出,式(4)中含有电机电角速度变量,选择电机本体作为参考模型,考虑到机械系统的时间常数远大于电气时间常数,因此在一个采样周期内,电机电角速度保持不变,因此式(4)可以作为参考模型。可调模型可表示为式(5):
(5)

3 参考自适应律的确定

(6)
将误差表达式简化表示为:
(7)

通过式(7)的误差表达式能够构建出MRAS的等效非线性系统,如图2所示。图中虚线框是前馈环节,P为增益矩阵,将误差矢量e转为自适应矢量V来控制时变环节,当V输入反馈环节,就可以输出反馈矢量W。
根据Popov超稳定性理论,非线性时变反馈环节要同时满足以下要求[11]:
1)线性环节传递矩阵Hs=(sI-A)-1为正定。

逆向求解Popov积分不等式可构建自适应率,过程如下:
令V=es,将W和V代入至不等式中,得到:
(8)
式中:s为拉普拉斯算子;I为n×n单位矩阵;t1为时间变量。

图2 MRAS的等效非线性系统Fig.2 Equivalent nonlinear system of MRAS
自适应率可写为如下形式:
(9)
式中:ω(0)为转速在初始时刻的估计值,rad/s;v为速度变量。
式(9)中,令ω(0)=0,将式(9)代入式(8)可以得到式(10):
(10)
式中:τ为时间常数。
式(10)可转化为:
(11)
可以将式(11)分解为两部分,如下所示:

(12)
(13)

(14)
式中:γ1、γ2为任意有限正数;Ki为积分增益。
将式(14)代入式(12)、式(13)可得:
(15)
对式(14)求导可得:
(16)

(17)
式中:Kp为比例增益。

(18)
式(18)中:
(19)
式中:εω为输出误差;i′s和i″s为实际电流和估计电流,A。
图3为基于MRAS的转速辨识系统图。

图3 基于MRAS的转速辨识系统Fig.3 MRAS-based speed recognition system
对式(18)求积分,能够得到估计的转子位置值,即:
(20)
由式(17)和式(20)可以得到转子辨识算法,整个算法的结构框图如图4所示。
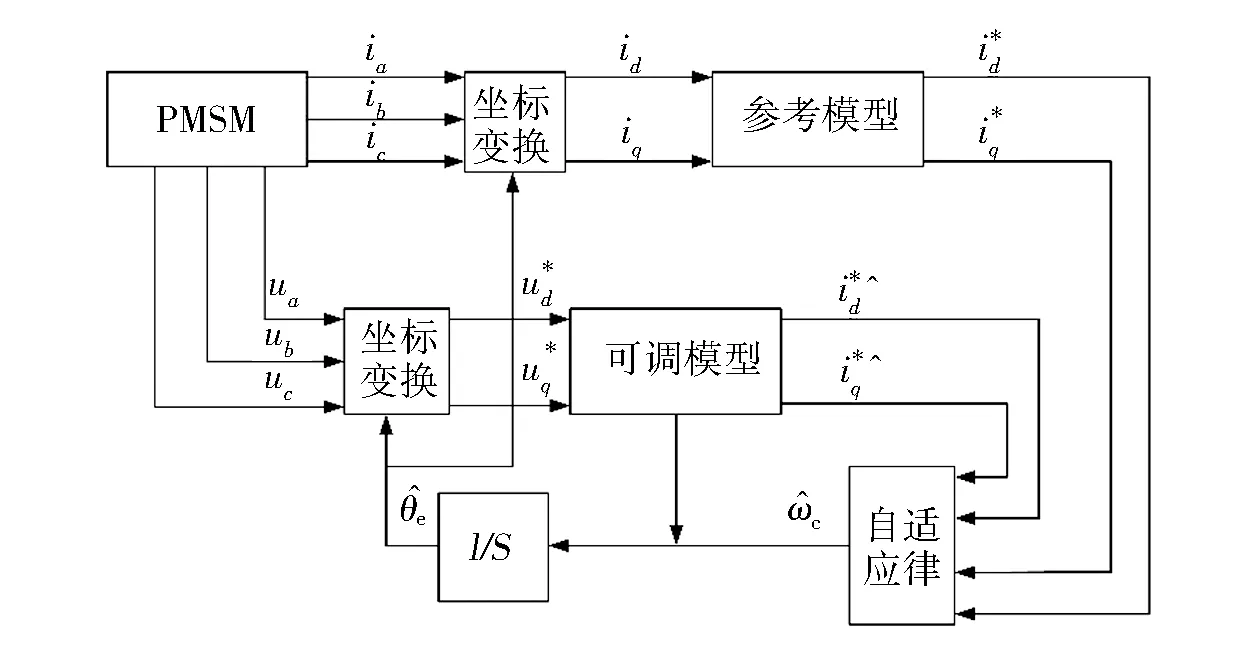
图4 MRAS法控制系统Fig.4 MRAS control system
4 仿真建模与结果分析
为了验证以上理论推导的正确性,同时对矿用带式输送机的现场运行工况进行模拟,设计可调模型、参考模型以及基于Popov超稳定性理论的自适应率。依据图5的基于MRAS法的转子位置检测原理图,利用MATLAB软件对带式输送机PMSM建立基于MRAS法矢量控制系统的仿真模型如图6所示。仿真参数如表1所示。

由式(18)可搭建如图8的转速自适应律仿真模型。其中,输入量“id”表示实际定子电流直轴分量id;输入量“iq”表示实际定子电流交轴分量iq。

表1 PMSM仿真参数

图5 基于MRAS的PMSM无速度传感器矢量控制框图Fig.5 Block diagram of PMSM speed sensorless vector control based on MRAS

图6 基于MRAS的PMSM无速度传感器仿真Fig.6 Speed sensorless simulation of PMSM based on MRAS

图7 可调模型仿真模块Fig.7 Simulation module of adjustable model
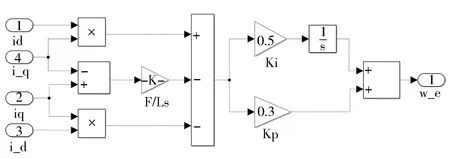
图8 自适应律仿真模型Fig.8 Simulation model of adaptive law
由图7和图8可组成如图9的MRAS仿真模型。其中,子系统“Tunable Model”为可调模型仿真模块;子系统“Adaptive Law”为自适应律仿真模块。输出量“theta”表示转子角度;输出量“w_e”表示电机电角速度。

图9 模型参考自适应模块Fig.9 Model reference adaptation module
仿真设定矿用带式输送机PMSM初始转速值为600 r/min,在系统运行到0.2 s时突加负载转矩TL=12 N·m,系统仿真结果如图10所示。

(a) 估计转子与实际转子速度

(b) 转速估计误差

(c) 估计转子与实际转子位置

(d) 转子位置估计误差

(e) 三相电流

(f) 电磁转矩图10 基于MRAS法的仿真结果Fig.10 Simulation results based on MRAS
从图10矿用带式输送机PMSM的仿真波形图可知,当电机转速从零上升到参考转速600 r/min时,转子速度和转子位置的误差较大,但均可在0.02 s内迅速使误差值稳定在零值上下波动;当系统运行到0.2 s时,误差值经略微波动即可恢复稳定运行。结果表明,该系统转速可以较好地跟随系统设定值,转速上升时间短,跟踪速度快,负载转矩突变时产生较小波动,三相正弦电流和电磁转矩都具有较好的动态响应性能。上述结果说明,本文所设计的基于MRAS法的带式输送机PMSM无速度传感器控制技术在设备运行时可以满足系统要求。
5 结束语
为解决矿用带式输送机异步电机存在低效运行且机械传感器易受干扰的问题,提出永磁同步电机无速度传感器控制。应用MRAS法对矿用带式输送机PMSM无传感器系统进行控制,构造MRAS的参考模型和可调模型,设计基于波波夫超稳定性定理的转速估计自适应律,并在MATLAB/Simulink中搭建仿真模块进行实验。实验结果证明了基于MRAS法的带式输送机PMSM无传感器系统控制策略的有效性,该方法具有良好的动态性能和稳态性能,能满足矿用带式输送机的控制要求。
猜你喜欢
冶金设备(2019年6期)2019-12-25
制造技术与机床(2019年11期)2019-12-04
电子制作(2017年17期)2017-12-18
制造业自动化(2017年2期)2017-03-20
军事运筹与系统工程(2016年3期)2016-09-26
电脑知识与技术(2016年10期)2016-06-16
江西煤炭科技(2015年4期)2015-11-08
橡胶工业(2015年10期)2015-08-01
橡胶工业(2015年6期)2015-07-29
橡胶工业(2015年2期)2015-07-29
