简谐运动两个定义的等价推证与实践应用
2023-08-11 05:52许冬保朱文惠
物理教师 2023年7期
许冬保 朱文惠
(1. 九江市第一中学,江西 九江 332000; 2. 九江市濂溪区第一中学;江西 九江 332000)
简谐运动是最基本、最简单的振动,是理想化的物理模型.现行教材[1-2]从运动学及动力学两个视角,分别给出了简谐运动的定义.由此引起教学上的困惑,为什么给出两个定义?两个定义是否是等价关系?在解决有关问题时,如何有效地选用定义来处理问题.
1 简谐运动的两个定义
1.1 定义1——运动学定义
如果物体的位移与时间的关系遵从正弦函数的规律,即它的振动图像(x-t图像)是一条正弦曲线,这样的振动是一种简谐运动.
1.2 定义2——动力学定义
如果物体在运动方向上所受的力与它偏离平衡位置位移的大小成正比,并且总是指向平衡位置,质点的运动就是简谐运动.
1.3 等价性推证
定义1与定义2并非独立的,两者描述的角度不同,但两者是等价的,由一个定义可以导出另一个定义.以下以弹簧振子为例进行分析.
1.3.1 由定义1导出定义2
如图1所示,把连在一起的弹簧和小球穿在光滑水平杆上,弹簧左端固定在支架上,小球可以在杆上滑动,杆非常光滑,小球滑动时的摩擦力可以忽略,弹簧的质量比小球的小得多,也可以忽略.这样就构成了一个弹簧振子.它是一个理想化模型.

图1 弹簧振子简谐运动模型
如图1所示,使小球偏离平衡位置O一段距离,由静止释放小球,小球在回复力F作用下,以O点为平衡位置来回振动,在O点右侧任意选择一个位置P,该时刻t=0,相对O点的位移为x.若弹簧的劲度系数为k,选O为坐标原点,取向右为x轴正方向,小球相对平衡位置的位移x随时间t按正弦(或余弦)规律变化.即
x=Asin(ωt+φ0).
(1)
由速度及加速度的定义,结合微分知识可得
(2)
(3)
对于某一时刻t,由式(1)(2)得到
(4)
上述表达式中,A、ω、φ0分别表示振幅、圆频率、初相位.A、φ0由初始条件(x0,v0)确定,这里x0为初位移,v0为初速度.由式(1)(2)可得关系式[3]
由式(1)(3)知a=-xω2.结合牛顿运动定律,有F=-xmω2.令k=mω2,则
F=-kx.
(5)
1.3.2 由定义2导出定义1
如图1所示,小球在P处,考虑到力F与x的方向,由胡克定律可以直接得到(5)式.同理,小球在O点左侧某位置Q,所受回复力F具有与式(5)相同的形式.
设P处的加速度大小为a,由牛顿运动定律,有ma=-kx,即
综上,方程(1)(5)分别从运动学与动力学的视角描述简谐运动,两者是等价的,均可作为简谐运动的判据.由上述分析还可以得到简谐运动的周期公式
2 实践应用
弹簧振子做简谐运动,其位移、速度、加速度等物理量随时间按正弦(或余弦)规律变化,并且对平衡位置具有时间、空间上的对称性.由于简谐运动的两个定义是等价的,因此,在具体问题的分析中,可以根据问题的已知信息及待求的物理量,灵活地选择相关定义来分析.
2.1 x-t表达式分析

(1) 振幅和周期; (2) 质点在t=0时受到的作用力.
评述: 理解简谐运动位移表达式中各量的物理意义是解决问题的基础.关于问题(2),也可以由定义2出发求解.根据k=mω2,得到k=6.25×10-3N/m.由于在t=0时,质点的位移为x=-6 cm,同样由F=-kx可得作用力F=3.75×10-4N.
2.2 x-t图像分析
例2.一弹簧振子沿x轴做简谐运动,平衡位置在坐标原点.t=0时振子的位移为-0.1 m;t=1 s时位移为0.1 m,则
(C) 若振幅为0.2 m,振子的周期可能为4 s.
(D) 若振幅为0.2 m,振子的周期可能为6 s.
解析:由弹簧振子的x-t图像进行分析.弹簧振子振动的位移设为x=Asin(ωt+φ0).若振幅为0.2 m,且t=0时刻,位移为-0.1 m, 即-0.1=0.2sinφ0,此时速度不为0,其振动方向可能远离平衡位置,振动图像如图2所示;振动方向也可能指向平衡位置,如图3所示.
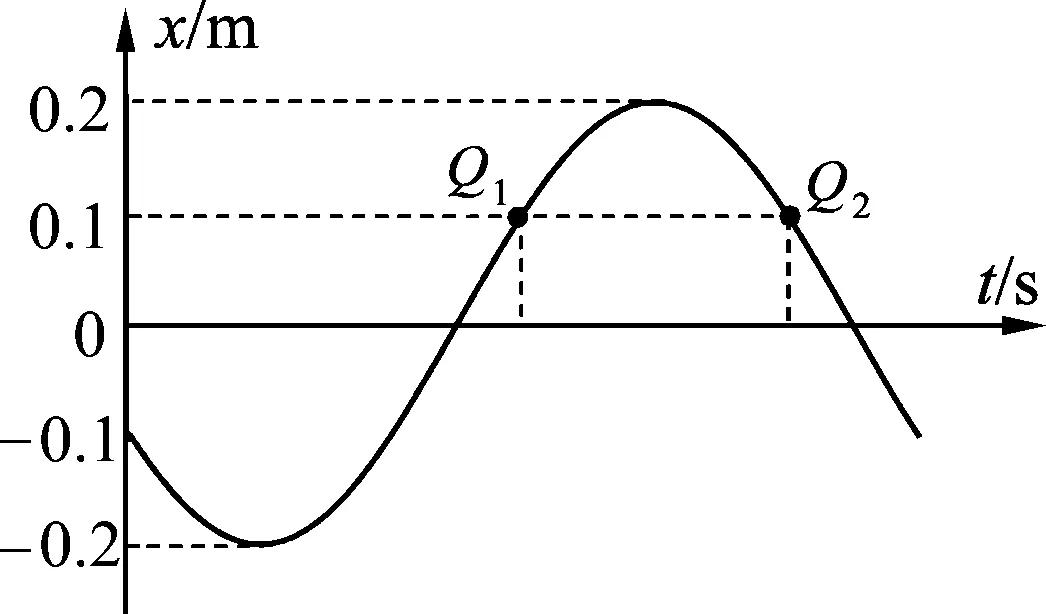
图2 x-t图像分析1

图3 x-t图像分析2



图4 参考圆分析

令n=0,上述各式中分别可得到Tmax.同样,取振幅为0.1 m进行讨论,所得结果同上.
2.3 动力学视角分析
例3.两位外星人A和B生活在一个没有自转的匀质球形星体上,有一次他们决定进行一场比赛,看谁先到达星球的对径位置.A计划沿着星体直径开一个隧道,采用自由下落的方式到达对径位置;B计划像卫星一样沿着紧贴星球表面的空间轨道飞到对径位置.问;谁会赢得这场比赛?(已知均匀球壳对其内部质点的引力为零)[4]

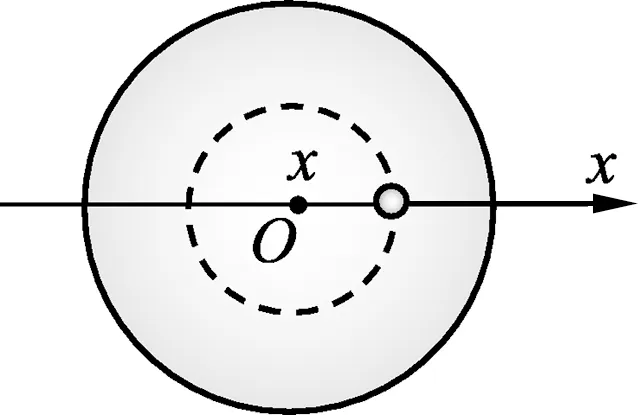
图5 星体隧道中分析

由于TA=TB,则比赛以平局告终.
评述:由定义2得到,外星人A在隧道中做简谐运动.导出的过程与弹簧振子做简谐运动的推证相同.对于一个振动是否为简谐运动的论证,从定义2出发思路清晰,自然流畅,合乎探究的逻辑脉络.
2.4 多视角分析
例4.如图6所示,固定在天花板上的轻杆将光滑轻质小定滑轮悬挂在空中,一根弹性轻绳一端固定在左边墙壁上A点,另一端与套在粗糙竖直杆上P点、质量为m的滑块连接,用手平托住滑块,使ABP在一条水平线上.绳的原长与A点到滑轮距离AB相等,BP之间的距离为d,绳的弹力F与其伸长量x满足胡克定律F=kx.滑块初始在P点时对杆的弹力大小为mg,滑块与杆之间的动摩擦因数为μ=0.2.现将滑块由静止释放,当滑到Q点时速度恰好为0,弹性绳始终处在弹性限度内,重力加速度为g.
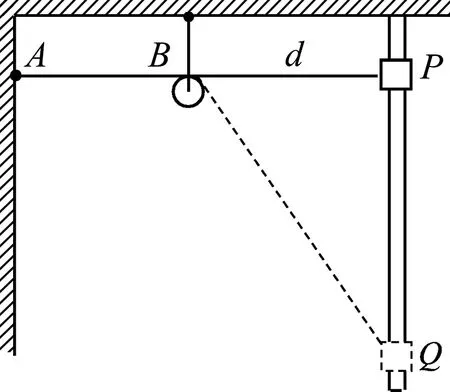
图6 滑块的振动
(1) 证明滑块从P到Q的运动为简谐运动;
(2) 滑块从P到Q又从Q沿杆上滑速度再次减至零的整个过程通过的路程.
解析: (1) 证明滑块的运动是简谐运动,以下给出两种方法.
视角1:定义2分析.


图7 滑块简谐运动推证1
F=mg-Ff-FTcosα.
式中,Ff=μFN.由平衡条件及已知信息,得FN=kd=mg,因此

视角2:定义1分析.
若滑块的运动是简谐运动,参考图7,则P、Q连线中点O为平衡位置,假设滑块振动的振幅为A,由于在平衡位置O,滑块的合力为0,故有mg=kA+μmg.已知kd=mg,则A=0.8d.
若某时刻通过任意位置M的速度为v,M相对平衡位置O的位移为x.由功能关系,有
式中,|Wf|为克服摩擦力所做的功,且|Wf|=μmg(A-x);ΔEp为弹性势能的增加量,即
解得

(2) 视角1:定义2分析.
用定义2分析推证,方法同上.
如图8所示,滑块从Q沿杆上滑至任意位置M′,运动位移s′,令O′为平衡位置,相对O′位移大小为x′.取向上为正方向,滑块在M′点受到沿杆方向的合力为
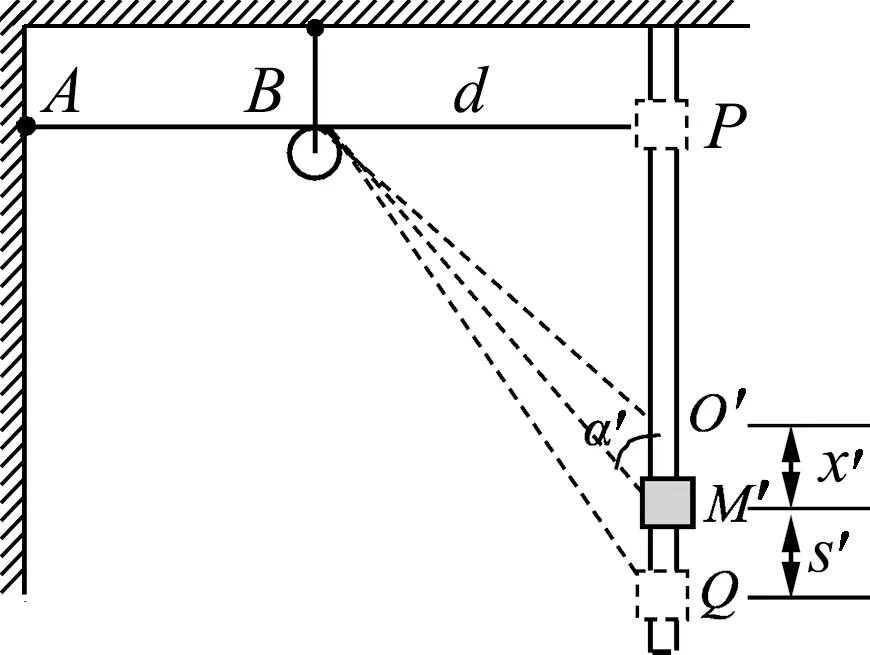
图8 滑块简谐运动推证2
F=k(2A-s′)-mg-μmg=

视角2:能量观念分析.
由问题(1)已得到,简谐运动的振幅A=0.8d,对应的路程为l1=2A=1.6d;参考图8,对于滑块从Q上滑到速度减至0的过程,设该过程对应的路程为l2,根据能量守恒定律,有
(1+μ)mgl2.
解得l2=0.8d.因此,两次振动的总路程l=l1+l2=2.4d.
评述: 弹性绳等效弹簧,弹性绳与滑块构成弹簧振子模型.从定义1及定义2出发分析论证滑块做简谐运动.通过比较不难发现,用定义2推证滑块的运动为简谐运动,更加简洁.教材上在分析单摆的运动为简谐运动时,正是使用定义2进行推证.需要说明的是,本题中滑块受到摩擦力作用,滑块的振动属阻尼振动,在振动过程中,交替改变平衡位置,振幅不断减小,直到最后停下来.[5]但是在特定的半个周期(即从平衡位置的一端到另一端)内,由于阻力大小恒定,滑块做区域简谐运动.每个区域简谐运动的时间均相同.若设问中只需求两次振动的总路程,则用能量守恒定律或功能关系求解更方便.
猜你喜欢
赤峰学院学报·自然科学版(2021年10期)2021-11-11
中学生数理化·自主招生(2021年8期)2021-05-30
数学物理学报(2018年1期)2018-03-26
中学物理·高中(2016年11期)2016-12-15
电测与仪表(2016年18期)2016-04-11
中国塑料(2015年9期)2015-10-14
考试周刊(2015年68期)2015-09-10
物理实验(2015年10期)2015-02-28
河南科技(2015年2期)2015-02-27
河南科技(2014年3期)2014-02-27