
考虑能量消耗的电驱动履带车辆路径规划方法研究
2023-08-21 04:15谭颖琦许景懿赵明珠熊光明陈慧岩
北京理工大学学报 2023年8期
谭颖琦,许景懿,赵明珠,熊光明,陈慧岩
(1.北京理工大学 机械与车辆学院,北京 100081;2.北京工业职业技术学院,机电工程学院,北京 410001)
履带车辆是军用车辆的重要类型,通常行驶在野外环境,履带与地面之间的接触作用十分复杂.在差速转向时,内侧/低速侧履带存在滑移现象,外侧/高速侧履带存在滑转现象[1],引起的能量消耗最高可达直行状态的7 倍[2],其运动学模型和动力学模型的建立比较困难[3].如何根据履带车辆转向时存在滑移滑转特性及其能量消耗进行合理的能效优化路径规划,实现远距离静默行驶、减少燃油消耗和提高执行任务效率是履带车辆研究的重要目标[4−5].
履带车辆实际转向时,可以等效为稳态转向的情况较少,其地面参数不易准确获取,超越方程的求解也非常复杂且计算实时性较差.基于瞬时转向中心理论[6]建立考虑滑移滑转特性的履带车辆运动学模型计算效率较高,但需设计估计算法获取较高精度的瞬时转向中心参数.在路径规划中动力学模型输出结果一般有两项作用:一是将用于确定最小转向半径的约束;二是用于评估车辆滑移滑转特性的能量消耗.在履带车辆转向动力学特性研究方面,最为关键的是分析履带车辆与地面之间的力学特性,通常假定履带车辆与地面之间的摩擦力服从库仑摩擦模型,即剪切力为常数[7],而大量相关试验结果表明,履带车辆的滑动摩擦力(即剪切力)相对于滑移滑转位移(即剪切位移)会呈指数变化[8].履带车辆能量消耗方面,主要采用履带车辆两侧电机瞬时功率的大小来评价能量消耗程度[9].为了实现在越野环境中规划出考虑能量消耗的无碰撞的安全路径,可引入兼顾效率和精度的碰撞检测方法,如近似碰撞检测方法、分层覆盖圆碰撞检测方法等[10].在路径规划算法方面,基于状态空间采样的方法虽然能够找到可行的路径解,但存在不能保证状态可达、随机采样缺乏目的性、与车辆模型难以结合等问题[11],对于电驱动履带车辆而言,需要规划满足车辆模型约束且能量损耗低的无碰撞路径尤为重要,但目前这方面研究较少.
针对以上问题,文中充分考虑履带车辆野外行驶时的滑移滑转特性,建立了基于瞬时转向中心理论的履带车辆运动学模型、基于指数摩擦理论的动力学模型、考虑电机瞬态特性的能量模型以及基于双层覆盖圆碰撞检测模型,提出了基于控制空间采样的多目标路径规划方法,并开展了仿真试验,验证了算法的有效性.
1 考虑履带车辆滑移滑转特性的模型建立
1.1 基于瞬时转向中心理论的履带车辆运动学建模
履带车辆转向过程中的运动学分析如图1 所示.假设滑动转向履带车辆在水平地面上运动且车体质心与几何中心O重合,大地坐标系为XOY,车体坐标系xoy固结于车体上;vx、vy分别为车体的纵向速度和横向速度,ω为车体的角速度,θ为车辆航向角;Oc(xc,yc)为车体瞬时转向中心,Ol(xl,yl) 和Oh(xh,yh)分别为内外两侧履带的瞬时转向中心;当车辆左转时,点M、N分别绕Ol和Oh转动,和分别为内外两侧履带的接地段上点M、点N的卷绕速度(即履带相对于车体的纵向线速度,与车辆运动方向相反);和分别为点M、N处的牵连速度(即车体运动速度);R为车辆质心O与车体瞬时转向中心Oc的距离转向半径;B为两侧履带中心距.

图1 履带车辆转向运动学分析Fig.1 Kinematic diagram of tracked vehicle steering
通过对履带车辆左转转向时的运动学分析,根据点M和点N的绝对速度vM、vN与牵连速度和卷绕速度的关系可知,履带卷绕速度、角速度、转向半径和瞬时转向中心坐标之间的关系为
由式(4) 可以获得各瞬时转向中心坐标的表达形式
通过式(5)可推出履带车辆的纵向速度vx、侧向速度vy与转向角速度 ω与瞬时转向中心坐标(xc,yc)之间的关系,为
将履带车辆在世界坐标系下的运动学状态表示为P=(X,Y,θ)T,其中 (X,Y) 表 示车辆位置,θ表示车辆航向.根据式(6)可得,基于瞬时转向中心的履带车辆运动微分方程为
文中引入扩展卡尔曼滤波方法[12],即利用车辆相对于某一时刻变化的位姿的残差值对运动学模型中的瞬时转向中心参数进行估计,最后更新状态方程如下:
式中:“ˆ”表示估计;“−”表示先验;qk是系数向量,为k时刻卡尔曼滤波方法中的状态变量;Pk为k时刻的预测轨迹;Qk为预测误差的协方差矩阵;Kk为k时刻的卡尔曼增益;Hk为k时 刻的测量矩阵;Rk为测量误差的协方差矩阵;z(k)为车辆相对位姿的实际值与预测值的残差值.
1.2 基于指数摩擦模型的履带式车辆滑移滑转特性动力学建模
如图2 所示,可以用指数摩擦模型函数关系式(9)来描述,比库仑摩擦定律更准确、更符合实际[10−11].

图2 剪切力与剪切位移关系图Fig.2 The shear stress with respect to shear displacement
式中:τss为剪切应力;τmax为最大剪切应力;p为正压力,与车辆的自重和载重量相关;μ为摩擦阻力系数;j是剪切位移,与履带车辆的运动状态相关;K为地面的剪切变形模量.
文中在履带车辆滑移滑转特性的传统动力学的研究基础上[13],利用指数摩擦模型关系以确定履带车辆与地面的剪切位移,从而预测剪切力;再通过对两侧整条履带在纵向方向上的剪切力分量进行积分,可预测其纵向力或纵向阻力;同理,通过对两侧整条履带在横向方向的剪切力分量进行积分,可获取转向阻力矩.履带车辆左转向时的动力学分析情况如图3 所示,取内侧履带接地段最前端M点为研究对象,M点在x’o’y’坐标系中的初始坐标为(xM,L/2),经过一段时间t后运动至坐标(xM,yM)处.

图3 履带车辆转向动力学分析图Fig.3 Dynamic diagram of tracked vehicle steering
内侧M点的滑动速度vM> 0,其在xlolyl坐标系中的xl轴、yl轴上的分量分别为vMx、vMy,vM与xl轴夹角为θM,则有:
滑动速度vM在XOY坐标系中X轴和Y轴方向上的分量用vMX、vMY表示,用于计算点M处的剪切位移,由此可得出M点处的局部滑动速度与全局滑动速度之间的关系为
由式(11)可知,M点处的剪切位移在X轴、Y轴方向上的分量jMX和jMY分别为
则低速侧履带接地点M的剪切位移总量jM为
同理,按照内侧履带接地点M的研究方法,取外侧履带接地点N为研究对象,可推出点N在xhohyh坐标系中的滑动速度vN以及在xh轴、yh轴上的分量vNx、vNy,vN与xh轴 的 夹 角θN,vN在XOY坐 标 系 中X轴和Y轴方向上的分量vNX、vNY,N点处的剪切位移在X轴、Y轴方向上的分量jNX、jNY以及点N处的剪切位移总量jN.
根据关系式(9) 可以得到内外两侧履带的纵向滑动摩擦力Fl与Fh分别为
式中:ph、pl分别为外内两侧履带受到的车辆正压力;μh、μl分别为外内两侧履带处的摩擦阻力系数;Kh、Kl为外内两侧履带处的剪切变形模量.
两侧履带所受的阻碍车辆前进的滚动阻力fl和fh的大小分别为
其中ch和cl分别为外内两侧履带处的滚动阻力系数,可通过参数拟合得到.
由上述推导可建立基于指数摩擦模型的履带车辆的动力学模型,表示为
式中:Ml和Mh分别为履带车辆转向时内外两侧电机的转矩;r为驱动轮半径;i是电机至驱动轮的传动比;η是电机至驱动轮的传动效率.
为不使两侧电机过载,电机转矩的绝对值都不超过电机的峰值转矩Mmax,则有:
1.3 能量模型建立
由动力学模型可知,对于给定线速度,两侧电机输出转矩是转弯半径的函数,即功率消耗为车辆转弯半径的函数.则瞬时功率表达式为
式中:Ml 和Mh为动力学模型输出的内外两侧电机转矩;ωln和ωhn为两侧电机角速度;vl和vh为两侧履带的卷绕速度;i为电机至驱动轮的传动比;r为驱动轮半径.
将式(18) 在车辆行驶时间内进行积分,得到时间t0~t之间的能量消耗量:
其中,Wl和Wh为内外两侧电机能量消耗量.
1.4 环境模型建立
文中采用双层栅格地图模型表示环境中的障碍物状态和障碍物距离[20],利用双层覆盖圆碰撞检测模型作为路径规划的碰撞检测模型,即利用不同大小的圆覆盖车体,利用覆盖圆的碰撞情况来判断车辆的碰撞情况,可以提高碰撞检测的精度和效率.本研究方法原理示意图如图4 所示,将履带车辆轮廓抽象为矩形框,xoy为车体坐标系,其中,A、B、C、D为车体坐标系下车辆矩形轮廓的四角点位置坐标,车体轮廓矩形长用a表示,宽用b表示,车辆轮廓外接圆的圆心为O(0,0) ,四个角圆的圆心分别为O1、O2、O3、O4,中间两圆的圆心分别为O5、O6,车辆轮廓外接圆半径为r0,四个角圆的半径为r1=r2=r3=r4,中间两圆的半径r5=r6.

图4 双层覆盖圆碰撞检测模型原理图Fig.4 Double-level hierarchical coverage circle collision detection model
第一层粗检测以车辆轮廓矩形的外接圆作为覆盖圆覆盖整个车体,如图4 点画线圆所示.当车辆距离障碍物较远时,只需要通过第一层粗检测的大圆来判断碰撞情况,当车辆到达障碍物附近时,则利用第二层精检测在保证车辆安全的前提下增大路径规划的解空间.第二层精检测是图中虚线表示的6 个覆盖圆,其中以圆心O1、O2、O3、O4的4 个小外接圆可覆盖车体四角位置,以圆心O5、O6的2 个中外接圆可覆盖车体中部位置.该双层覆盖圆碰撞检测方法通过“大圆—六圆法”在保证安全的前提下实现粗检测到精检测,提高碰撞检测效率.
2 基于控制空间采样的多目标路径规划算法设计
为有效地将履带车辆运动学与动力学模型、能量模型及环境模型与路径规划相结合,本研究提出一种基于控制空间采样的模型融合多目标优化路径规划方法,设计多目标优化策略,规划一条符合车辆模型约束且考虑能量消耗的合理路径.
2.1 运动学模型与动力学模型在路径规划中的融合应用
如图5 所示,基于控制空间采样算法中嵌入的模型为状态转移模型、代价值计算模型和启发值计算模型;其中状态转移模型由运动学模型和动力学模型决定,运动学模型的输出量会用于代价值计算模型和启发值计算模型的计算.动力学模型在规划中会结合车辆属性和车辆运动状态,计算车辆沿采样路径行驶的电机转矩和能量消耗,便于对路径的代价进行评估.
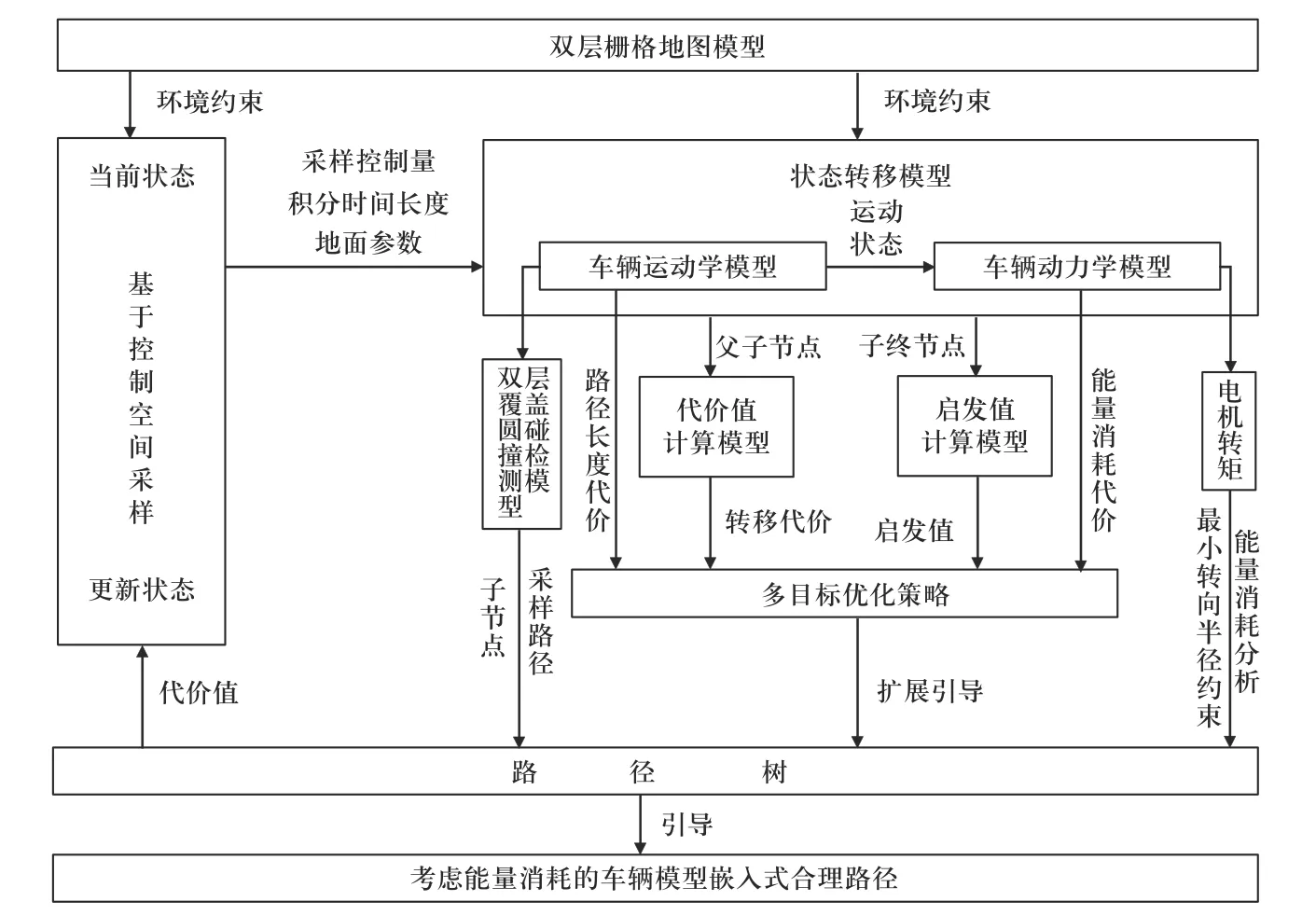
图5 考虑能量消耗的模型融合多目标优化路径规划流程Fig.5 Path planning of multi-objective optimization for vehicle model with energy-consumption
履带车辆运动学模型的输入量包括瞬时转向中心参数、履带车辆卷绕速度采样值和积分时间长度,输出量为子节点状态和采样路径.履带车辆动力学模型的输入量包括车辆参数、车辆运动状态和地面参数,输出量为车辆的电机转矩,结合车辆参数对采样路径的能量消耗进行分析与预估,同时比较输出的电机转矩与车辆电机峰值转矩,可计算出车辆的最小转弯半径,作为路径规划中的一个约束量.
2.2 基于控制空间采样的多目标路径规划算法设计
基于控制空间采样的模型嵌入式路径规划算法需要维护一棵路径树,利用运动学和动力学约束以及环境约束保证采样状态是可达的;设计多目标优化策略引导路径树按照满足设定需求的方式进行扩展[14],比如路径最短、用时最少或者能量消耗最低等.
图6 为所提出的基于控制空间采样的模型嵌入式路径规划算法基本原理,图6 的(a)、(b)、(c)分别为路径规划的三个阶段.该算法规划流程如下:在图6(a)所示的第一阶段采样中,A为路径规划起点,“GOAL”为路径规划终点,将在控制空间采样得到的控制量输入规划算法中的状态转移模型,即得到相应数量的子节点B、C、D、E与父节点A到子节点之间的扩展方式,从而获取每个子节点的状态转移代价值;将这几个子节点的状态与“GOAL”之间的关系输入启发值计算模型,获取每个子节点的启发值.目标导向优化策略利用各子节点的代价值和启发值,选出最优的节点作为第二阶段采样的起点,如图6(b) 中节点D.通过采用第一阶段采样时同样的方法求出各个新节点的代价值与启发值,如此循环,直至节点扩展至终点“GOAL”附近预设的范围内,则规划流程结束.

图6 基于控制空间采样的模型嵌入式路径规划基本原理Fig.6 Model embedded path planning algorithm based on a control space sampling
本研究设计多目标导向优化策略:将优化目标设计为路径长度和能量消耗两个部分,每个部分分别又包含代价值和启发值两个部分.以图6(c)中路径树扩展过程中的节点H为例,节点H的路径长度代价CD计算方法为
式中:dA,H为从规划起点A点到节点H点的路径长度代价值,由运动学模型的输出量在积分时间长度上做积分计算得到,即图6(c)中AD-DH路径点画线的长度;DH,GOAL为路径长度启发值,不考虑障碍物的影响,即从节点H到规划终点“GOAL”路径长度的欧氏距离,即图6(c)中绿色虚线的长度.节点H的能量消耗代价CE计算方法为
式中:eA,H为从起点A沿着曲线路径行驶至节点H所对应的能量消耗代价值,其大小可由式(19) 获得;EH,GOAL为从当前节点H沿直线以当前节点处的车速匀速行驶至规划终点“GOAL”所消耗的能量启发值,即图6(c)中虚线的规划路径,计算能量消耗启发值时假设行驶车速与节点H点处的采样车速相同.
为了比较两种不同单位、不同量级的代价值并进行加权组合,特将代价值进行归一化处理,即去量纲化以防止数值不同的代价值对总代价值的影响不同.因此,综合式(20)和式(21),设计多目标导向优化代价函数为
综上所述,本研究设计的多目标导向路径规划优化策略为:使式(22)的代价函数值C最小.如图6(c)所示,“A-D-H-L”为最终规划的符合目标导向优化策略的合理路径.
3 仿真与结果分析
文中基于某履带无人平台在仿真环境中设计试验场景,验证规划算法中各参数对规划结果的不同影响,对规划结果进行对比分析.本试验无人履带车辆平台使用混合动力电驱动系统,双侧电机独立驱动两侧履带,定位系统由GPS 与惯性导航系统组成,感知系统包括两个32 线激光雷达与两个16 线激光雷达;安装Linux 操作系统并搭载定位感知工控机和规划控制工控机,定位感知工控机是用于获取车辆的定位和感知数据;规划控制工控机的作用是在定位模块、感知模块和其他模块的协助下运行规划控制程序,基于ROS 框架以C++语言开发实现车辆自主行驶.
本研究在地面属性不变场景下完成两项仿真试验,分别是:考虑能量消耗与路径长度最优的不同参数路径规划试验、多目标导向路径规划优化策略试验.本场景中的摩擦阻力系数、剪切变形模量与滚动阻力系数采用自适应粒子群优化算法进行参数拟合[22].本试验瞬时转向中心参数通过卡尔曼滤波方法进行估计.地面参数拟合结果和瞬时转向中心相关参数如表1 所示.

表1 地面参数和瞬时转向中心参数Tab.1 Ground and ICR parameters
3.1 考虑能量消耗与路径长度最优的不同参数下路径规划仿真试验
图7 中黑色部分表示不可通行障碍物,灰色部分表示可通行类型地面;规划起点和规划终点已标注,箭头表示车辆的初始朝向;路径A为考虑路径长度最优的单目标导向的规划路径;路径B为本研究设计的考虑能量消耗的多目标导向优化策略的规划路径.

图7 不同参数下路径规划结果图Fig.7 Path planning result for different parameters
本项仿真试验的参数设置与规划结果如表2 所示,对比图7 的结果可知,路径BB 相对于路径A而言,能量消耗降低了44.13%,而路径长度几乎没有增加.图8 为车辆初始朝向不同的规划结果.通过图8可以看出,路径A的规划长度较短,但存在6 次转向,车辆的能量消耗增加;而路径B的规划更倾向于绕路到达终点,但只有2 次转向,能量消耗大大降低,验证了路径规划方法的节能有效性.通过对比图7 和图8,最终的规划路径是完全不同的,这说明本研究提出的路径规划方法考虑到了车辆的运动学约束.图8的试验规划结果数据如表2 所示,路径B相对于路径A,能量消耗降低了53.50%,而路径长度增加很少.
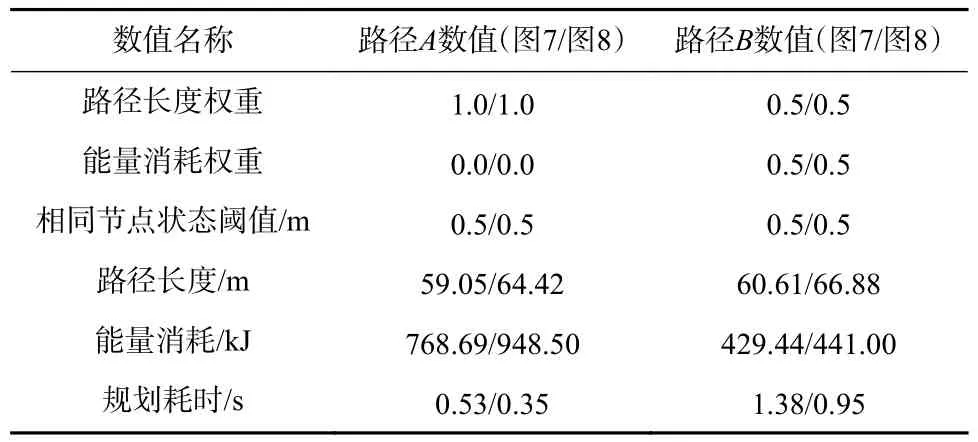
表2 仿真试验参数设置及规划结果Tab.2 Parameters sets of simulation and path planning results

图8 车辆运动学模型验证规划结果Fig.8 Path planning result for kinematic model verification
3.2 多目标导向路径规划优化策略试验
本试验是验证多目标导向优化策略中不同的权重值对路径规划结果的影响,规划结果如图9 所示.表3 为本项试验参数设置与规划数据结果.

表3 不同权重下试验参数设置与规划结果Tab.3 Parameters sets of different weights and the path planning results

图9 多目标导向路径规划优化策略试验结果对比图Fig.9 Comparing results of path planning for multi-objective optimization simulation
通过对比三条不同权重的路径规划曲线结果可以看出:能量消耗权重越大,规划结果的能量消耗越少,但路径长度则越长;能量消耗权重越小,规划结果的路径长度则越短,但能量消耗越大.因此,可以利用多目标导向优化策略的权重值来控制路径规划结果是否偏向考虑能量消耗还是考虑路径长度最优.
4 结 论
文中提出了基于控制空间采样的考虑能量消耗的电驱动履带车辆多目标路径规划算法,并对提出的规划算法完成了不同参数对比试验与多目标导向路径规划优化策略试验,验证了本试验算法的可行性、有效性与节能性,也验证了本研究提出的考虑能量消耗的多目标导向优化策略路径规划方法相对于只考虑路径长度最优的路径规划方法有一定的优越性,下一步计划将该算法进行实车试验.
猜你喜欢
体育科技文献通报(2022年4期)2022-10-21
体育科技文献通报(2022年3期)2022-05-23
中国石油石化(2021年8期)2021-03-30
作文中学版(2020年1期)2020-11-25
河北省科学院学报(2020年1期)2020-05-25
石油化工建设(2019年6期)2020-01-16
制造技术与机床(2018年11期)2018-11-23
石油化工建设(2017年2期)2017-06-05
海军航空大学学报(2015年1期)2015-11-11
橡胶工业(2015年4期)2015-02-23
