面向体系仿真的敏捷成像卫星系统建模方法
2023-09-06 01:00陆志沣周金鹏从光涛
系统仿真技术 2023年2期
高 远, 陆志沣, 周金鹏, 赖 鹏, 从光涛
(上海机电工程研究所,上海 201109)
近年来,敏捷成像卫星技术迅猛发展,因其卫星平台的灵巧性及成像载荷的工作模式多样性,能够更为快速地获取高质量图像信息,因而越来越多地应用于各国军事领域,服务于战场态势监视及重点目标侦察任务[1-3]。敏捷成像卫星系统由空间段的敏捷成像卫星以及地面段的接收遥测系统与任务系统组成。敏捷成像卫星系统工作的一般过程为:地面任务系统通过处理成像任务生成卫星任务方案;以任务指令的形式控制卫星在过顶时段内实现对地成像;将成像结果传回地面;最终由地面任务系统处理结果数据,获得战场态势[4-5]。
随着卫星技术在军事领域的应用,卫星支援下的体系化作战已逐渐成为一种新型的作战模式[6-10]。在此背景下,如何开展敏捷成像卫星作战运用下的体系对抗仿真、研究这一新式作战模式成为该领域新兴研究热点。但实际成像卫星系统功能组成及运作机理复杂,据此建立的细粒度数字卫星模型往往重视分系统细节,并未考虑与作战系统的互联接口,导致所建立的卫星仿真系统要素欠缺、灵活性与拓展性差,无法与其他体系仿真要素直接集成,难以支撑体系级作战仿真。因此,建立适用于体系仿真的敏捷成像卫星系统仿真模型具有现实意义[11-16]。
1 建模对象分析
敏捷成像卫星系统由空间段的敏捷成像卫星以及地面段的接收遥测与任务系统组成。成像卫星主要包括平台、动力系统、电荷耦合器件、光学载荷传感器、通信设备等组件模块,负责空间轨道保持、成像任务执行及态势数据回传任务;遥测系统主要指地面站系统,包括数据处理及转发模块,主要用于数据接收及指令上行;任务系统主要包括成像卫星任务规划模块及回传数据处理模块,负责卫星任务的生成及控制、情报信息接收处理。
敏捷成像卫星系统支援下的典型作战工作流程如图1所示。

图1 敏捷成像卫星系统支援下的典型作战工作流程Fig.1 Typical operation workflow supported by agile imaging satellite systems
典型作战工作流程可分为以下几个阶段。(1)作战任务获取与成像任务生成阶段:地面任务系统接收作战指挥系统的作战任务信息,通过目标区域分解、任务规划等生成卫星任务序列,并对应产生指向转移等控制指令序列;(2)指令上传阶段:地面任务系统根据规划后的卫星成像任务时序,通过地面站系统向敏捷成像卫星传递指向控制指令序列;(3)对地成像阶段:敏捷成像卫星根据任务系统上传的指令信息摆动传感器,执行对地成像任务;(4)成像数据下传阶段:敏捷成像卫星通过通信设备将成像数据下传至地面站,再由地面站将数据转发至地面任务系统;(5)成像数据处理阶段:地面任务系统从接收的成像数据中处理获取目标信息,将目标信息报送作战指挥系统。
2 建模过程
2.1 总体设计
通过建模对象分析,将敏捷成像卫星系统建模转化为对敏捷成像卫星与地面系统的建模,基于组件化建模方法及敏捷成像卫星支援下的作战活动流程分析完成系统集成构建。敏捷成像卫星系统建模总体设计如图2所示。
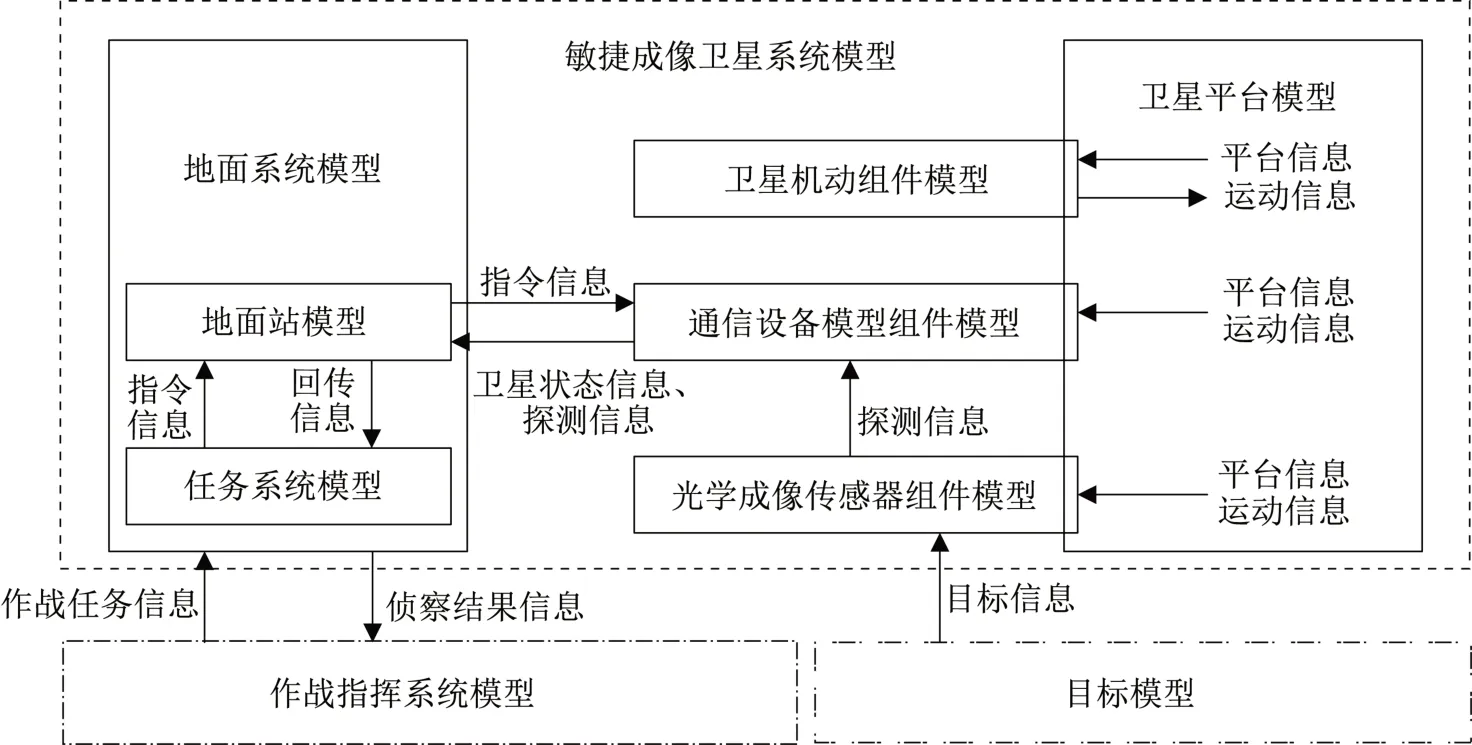
图2 敏捷成像卫星系统建模总体设计Fig.2 Overall design of modeling for agile imaging satellite systems
基于组件化建模方法,将敏捷成像卫星模型拆分成卫星平台模型、卫星机动组件模型、光学成像传感器组件模型、通信设备组件模型,各组件通过参数化配置实现模型快速生成,经接口组装即可配置成敏捷成像卫星模型。按功能组成将地面系统模型分为地面站模型与任务系统模型,模拟地面系统的系统功能及工作流程。
2.2 敏捷成像卫星建模
2.2.1 卫星平台建模
卫星平台模型主要实现整星姿态转移、电量及存储容量管理等功能,计算输出卫星当前指向姿态、实时存储及电量等平台信息。
(1)姿态机动能力。当点到点机动时,卫星姿态机动速度如表1所示,表1中机动角度及机动并稳定时间为输入参数。

表1 卫星点到点机动速度Tab.1 Satellite point-to-point maneuvering speed
摆动成像的机动角度φ由欧拉轴/角参数式求取,对应的机动并稳定时间t可通过表1利用线性插值获得。
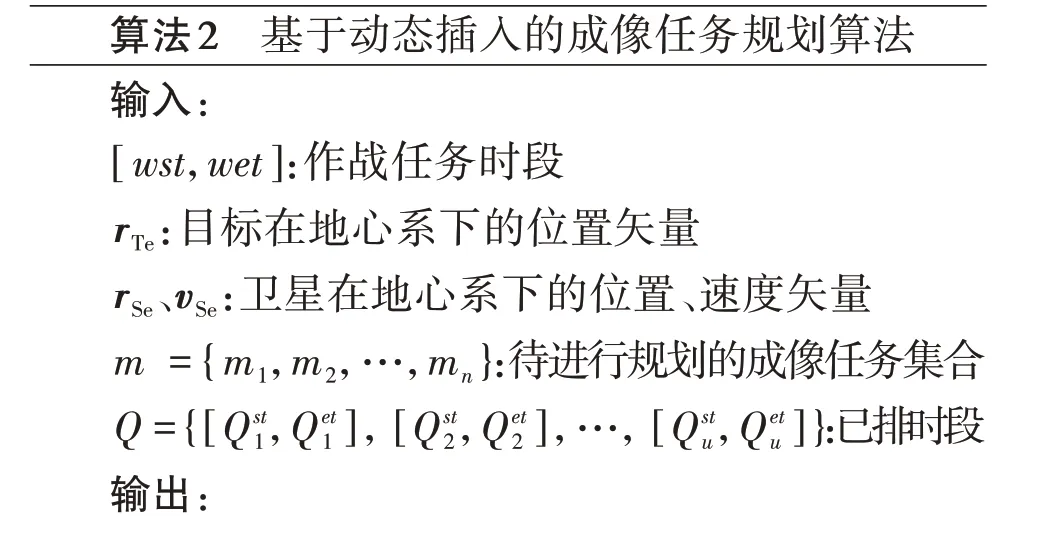
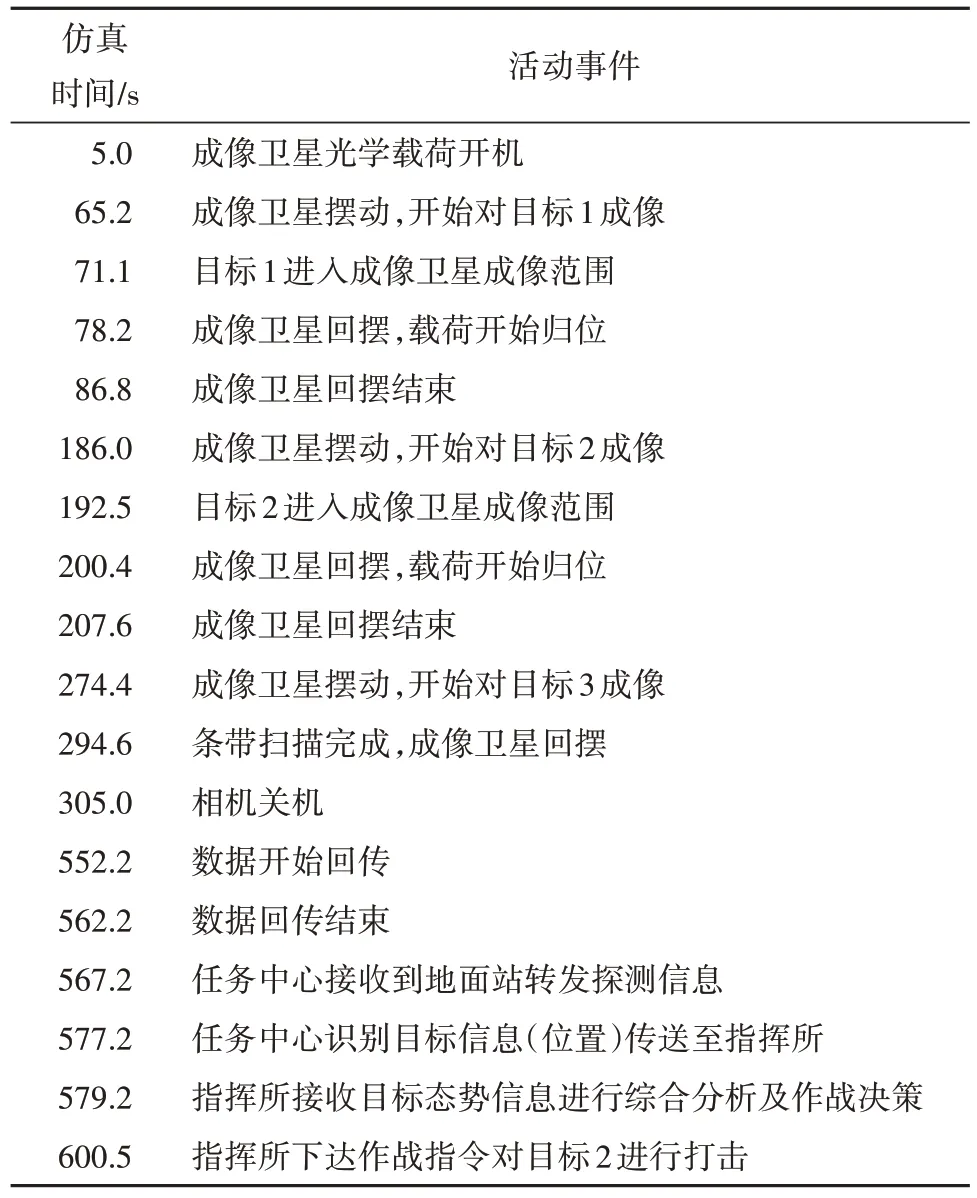
(2)电量维护。假设电池单位时间充电量为Pc,光学载荷工作单位时间耗电量为Ph,满电容量为Pmax,设仿真过程的实时电量为P(t),且P(t) 式(1)中Δt为仿真周期;xt为非地影标志,xt= 0表示卫星当前在地影内,xt= 1 表示卫星当前不在地影内;yt表示卫星当前工作状态,yt= 0 表示卫星当前未成像,yt= 1表示卫星当前正在成像。 (3)存储维护。假设光学载荷工作单位时间数据产生量为Ds,回传速率为Dc,固存满载容量为Dmax,设仿真过程的实时可用存储为D(t),且D(t) 式(2)中zt为回传标志,zt= 1 表示卫星当前已回传,zt= 0表示卫星当前未回传。 2.2.2 卫星机动组件建模 卫星机动组件模型主要实现卫星轨道运动的模拟。为满足体系对抗仿真需求,保证一定的推算精度,基于J2摄动模型,利用经典轨道六根数(a,e,ω,i,Ω,f)与卫星地心惯性系的转换关系,在输入六根数的情况下,积分推算卫星轨道参数,六根数中a为轨道半长轴、e为轨道偏心率、ω为近地点辐角、i为轨道倾角、Ω为升交点赤经、f为真近点角。考虑地球形状J2摄动的轨道动力学微分方程见式(3)。 式(3)中,vSi=[vx vy vz]T、rSi=[x y z]T为卫星在地心惯性坐标系下的速度与位置矢量,Re为地球半径,μ为地心引力常数。 采用RK4 的方法,即可在仿真驱动下完成轨道积分推算,输出卫星平台的运动信息。 2.2.3 光学成像传感器组件建模 光学成像传感器组件模型主要模拟电荷耦合器件相机的成像过程及成像能力。为适应体系仿真需求,将成像输出结果转换成目标检测结果,模型的解算方法流程见算法1。 其中,利用星地几何求取目标的视线角度,即目标指向与本体系z轴的夹角αT。若目标在传感器的视场内,需满足 式(4)中,α(t)为光学传感器视轴当前指向角,β为光学传感器视场角。 卫星摆动成像图像分辨率计算公式为 |rSe算法1 光学成像传感器组件模型解算方法输入:rTe、rSe:目标、卫星在地心系下的位置矢量opT:目标的光学特性信息poS:光学成像传感器指向矢量输出:od:光学成像传感器探测结果1 初始算法参数2 求目标视线角αT ←a cos[rTe ⋅rSe/|rTe|×]|)3 求传感器摆角α(t)←a cos[]poS×rSe/()||poS×| |rSe 4 if |αT - α(t)|< β/2 then 5 判定目标在视场内od1 ←1 6 求成像分辨率od2 ←ω ←(δ2 - δ1)⋅r 7 求目标位置信息od3 ←rTe + σ 8 if od2 ≤ωmin then 9 判定目标可被检出od4 ←1 10 else 11 判定目标不可被检出od4 ←0 12 end if 13 od ←(od1 od2 od3 od4)14 else 15 od ←(0 0 0 0)16 end if 17 return od 式(5)中,r为光学传感器星下分辨率,RS为卫星地心距。 在视场检查的基础上,由成像图像分辨率与最小可检测分辨率ωmin的相对大小即可判断目标可否被探测到,再通过定位准确度σ叠加探测误差获取定位结果,最终输出探测结果信息od,包括目标是否在传感器视场内od1、成像分辨率od2、目标位置od3、是否可检出od4。 2.2.4 卫星通信组件建模 通信设备组件模型主要模拟卫星通信过程,将光学传感器的探测信息传送至地面系统,并接收来自地面系统的指令信息,针对体系仿真的需求,只模拟通信数据收发过程及通信延迟效果。 2.3.1 地面站建模 地面站模型主要模拟地面站系统的通信过程,接收卫星数据上传,并上传指令信息,针对体系仿真的需求,只模拟地面站通信数据收发过程及通信延迟效果。 2.3.2 任务系统建模 任务系统模型主要模拟成像任务生成、任务规划等工作过程。 (1)成像任务生成。针对指挥系统模型下达的点目标侦察、区域目标搜索等作战任务,将其中的区域目标通过区域分解等方法将作战任务区域划分为光学载荷能够单幅成像覆盖的成像任务,利用光学载荷的点成像模式、推扫成像模式完成成像任务。 图3 为等幅宽区域任务分解及推扫过程示意图。d为星下幅宽,可利用式(6)计算得到。 图3 区域任务分解及推扫过程示意图Fig.3 Schematic diagram of regional task decomposition and push-broom process (2)成像任务规划。体系仿真过程中作战任务具有在线分配的动态性,同时需要实现任务规划过程的高效自动化解算。基于此,需要在考虑成像约束条件的前提下,根据卫星的任务状态以及新晋任务的属性特征完成敏捷卫星成像任务规划。基于动态插入的成像任务规划算法的运行流程见算法2。 算法2 基于动态插入的成像任务规划算法输入:[wst,wet]:作战任务时段rTe:目标在地心系下的位置矢量rSe、vSe:卫星在地心系下的位置、速度矢量m ={m1,m2,…,mn}:待进行规划的成像任务集合Q={[Qst1,Qet1],[Qst2,Qet2],…,[Qstu,Qetu]}:已排时段输出: 算法2 中,输入的待规划成像任务集为m={m1,m2,…,mn},作战任务时段为[wst,wet],已经安排的任务M={M1,M2,…,Mu},Q=为对应的成像任务时序,表示已安排任务Mj的开始成像时间与结束成像时间,1 ≤j≤u。在每个仿真周期内,当经新晋任务不为空时,按照以下步骤进行任务规划: step1:按优先级先后从m中取待规划成像任务mi,0 step2:根据mi的任务区域长度Li及传感器对地成像扫描速度v计算成像任务用时cti,cti=Li/v。若成像任务为点成像任务,则Li=d; step3:在[lsti,leti]内,确定成像任务插入点,选取成像时段[sti,eti]。 若[lsti,leti]内已排成像任务占用时间为Q′=对应可用时间为在Q″内,按照由前向后的顺序,判断各时段的时间长度是否大于cti+pt,pt为成像准备时间,若某时段Q″j=的时间长度大于cti+pt,则进行成像约束检查,成像约束包括以下几种。 (1)摆动约束:成像过程的传感器摆动角度应在机械摆动限幅内,即 其中,αi为执行任务mi时传感器的摆角,αmax为机械摆动限幅。 (2)电量及存储约束:插入任务mi后的任务序列对卫星电量及存储的消耗需要满足阈值限制,即 其中,Ptmax表示传感器的单轨最大成像时长,Dtmax表示最大允许存储量。 (3)太阳高度角约束:光学任务指定成像的太阳高度角的范围,以保证图像质量,即 其中,γi为执行任务mi时的太阳高度角,γmin为保证一定图像质量的最低太阳高度角。 在Q″内,若某时段Q″j的时间长度小于cti+pt,则按上述过程继续下一时段元素Q″j+1的判断,直至尾元素,输出计算结果。 在构建敏捷成像卫星系统仿真模型的基础上,根据总体设计,集成敏捷成像卫星系统仿真系统,基于仿真系统开展仿真验证试验,检验所建立模型的准确性以及在作战体系仿真中的实用性。 仿真参数设置如表2所示。 表2 仿真参数设置Tab.2 Simulation parameters setting (1)卫星机动组件模型验证。采用STK软件对比试验对卫星机动组件模型准确性进行验证。仿真卫星轨位与STK运行结果的对比如图4所示,图4中横坐标为时间,纵坐标为位置相对误差,从图4中可以看出,各方向的相对位置误差均低于0.01%,能够满足体系仿真需求。 图4 卫星仿真位置对比误差Fig.4 Position comparison error of satellite simulation (2)其他模型验证。仿真参数设置同表2,选取同轨多点目标场景进行模型仿真试验,主要验证敏捷成像卫星模型与地面系统模型的设计合理性与准确性。仿真目标设置如表3所示。 表3 卫星成像任务设置Tab.3 Imaging task of satellite 仿真过程中,系统经任务规划仿真得到的任务序列为:“舰艇1→目标点2→目标点3→目标点7→目标点1→目标点5→目标点9→目标点4→目标点6→目标点8”。仿真结果显示,卫星依次沿上述任务序列进行过境成像,仿真结果与设计预期相符,表明成像任务规划方法以及任务系统模型准确有效,仿真过程成像路径如图5所示。 图5 多点目标场景仿真成像路径Fig.5 Simulation imaging path of multi-point target scene 仿真成像过程中,卫星传感器指向角变化过程如图6-7 所示。图中覆色区域为传感器姿态转移限幅范围,从中可以看出,传感器能够根据任务序列对每个任务进行摆动成像,传感器指向转移过程满足姿态幅度限制以及机动能力约束,设计结果合理,各模型可满足体系仿真对敏捷成像卫星的应用需求。 图6 传感器指向俯仰角变化曲线Fig.6 Change curve of sensor pointing pitch 图7 传感器指向方位角变化曲线Fig.7 Change curve of sensor pointing azimuth 仿真参数设置同表2,卫星成像任务设置如表4所示,仿真过程活动事件记录如表5所示。 表4 卫星成像任务设置Tab.4 Imaging task of satellite 表5 仿真过程信息Tab.5 Information of Simulation process 从表5 中可以看出,所构建的敏捷成像卫星系统模型可功能模拟卫星轨道运动、载荷探测、通信传输、作战支持等工作活动。在仿真场景中,目标2 作为新增任务,被排入成像任务队列,卫星以“点目标-目标1->点目标-目标2->区域目标-目标3”的顺序依次完成成像任务,并最终以目标2 作为打击目标实施作战。仿真过程及结果表明,所构建的敏捷成像卫星仿真系统可有效支撑天基信息支援作战体系仿真。敏捷成像卫星仿真过程如图8所示。 图8 敏捷成像卫星仿真过程Fig.8 Simulation process of agile imaging satellite system 基于体系对抗的仿真应用背景,本研究采用组件化建模方法构建了敏捷成像卫星平台模型、卫星机动组件模型、光学成像传感器组件模型、通信设备组件模型,设计构建了卫星地面站模型以及基于任务动态插入的敏捷成像卫星地面任务系统模型,在集成敏捷成像卫星系统仿真系统的基础上,通过仿真试验验证了所构建的敏捷成像卫星系统模型能够实现自动化成像任务编排,模拟敏捷成像侦察过程,满足卫星作战运用背景下的体系对抗仿真需求。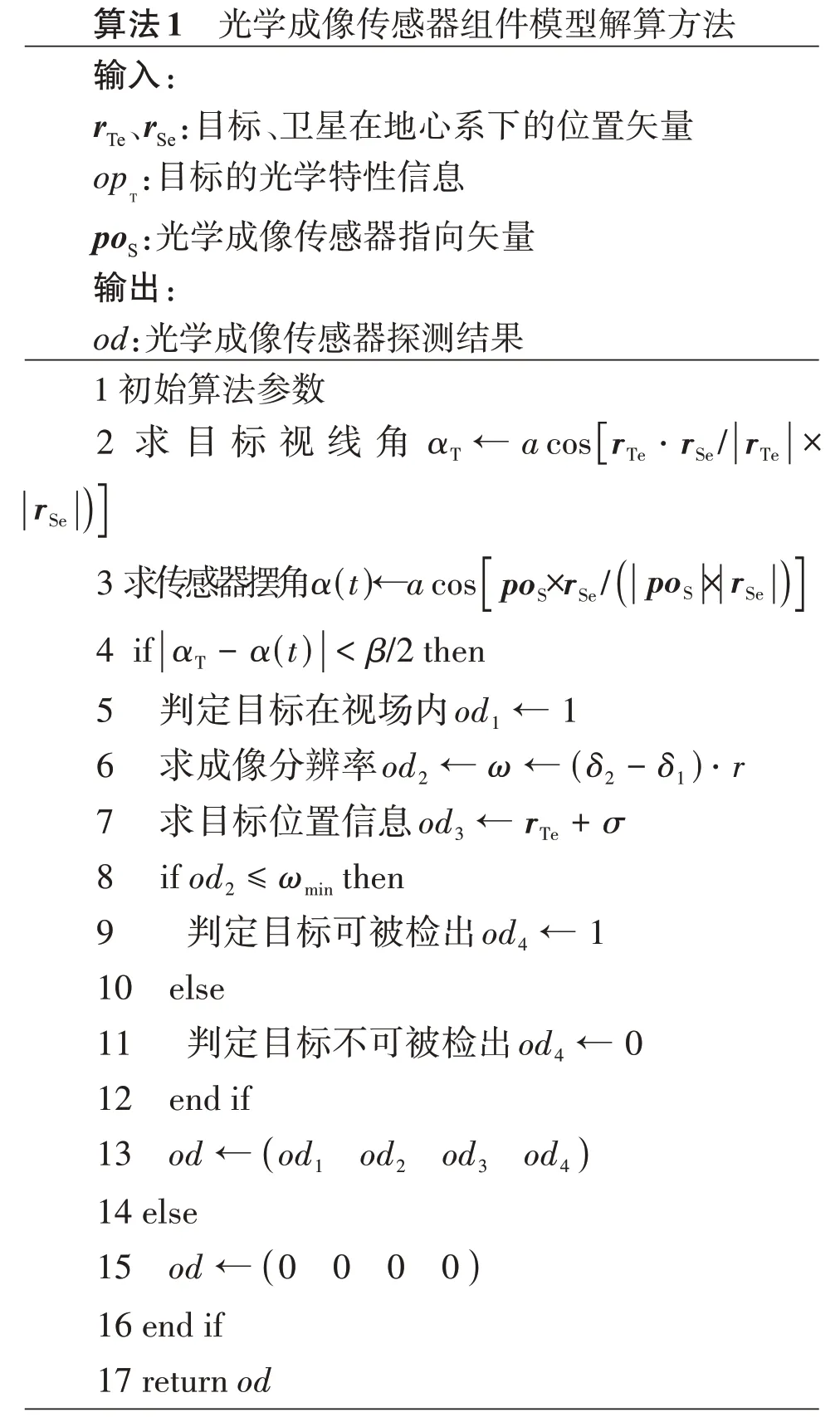
2.3 地面系统建模

3 仿真试验
3.1 模型准确性验证


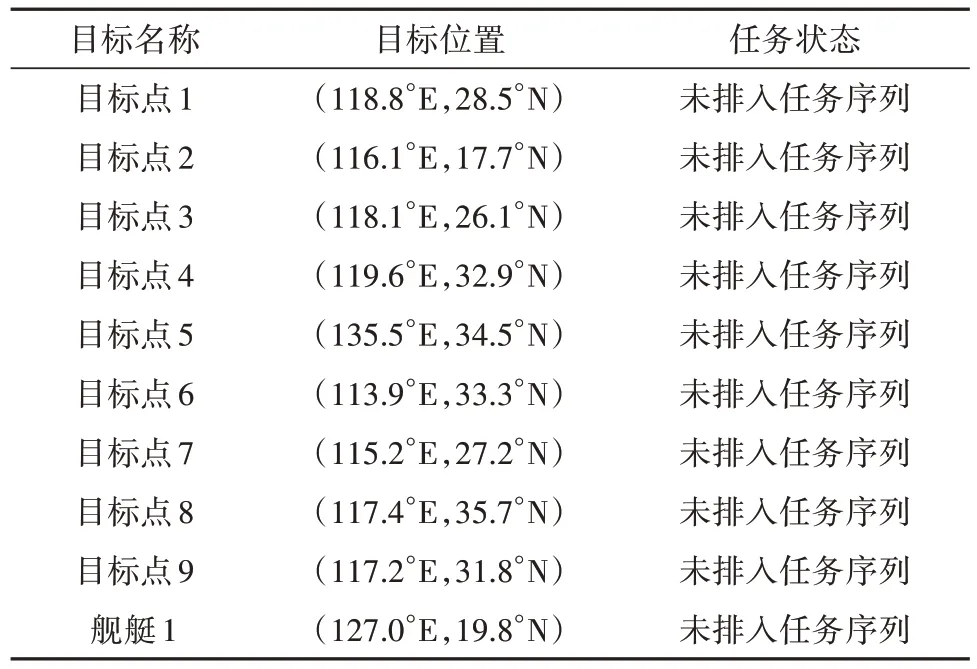



3.2 体系仿真应用


4 结 论
猜你喜欢
能源工程(2022年2期)2022-05-23初中生学习指导·中考版(2022年4期)2022-05-12中学生数理化(高中版.高考理化)(2021年5期)2021-07-16中学生数理化(高中版.高考理化)(2020年11期)2020-12-14重型机械(2020年2期)2020-07-24装备制造技术(2019年12期)2019-12-25电子制作(2018年17期)2018-09-28通信电源技术(2018年5期)2018-08-23太阳能(2015年11期)2015-04-10航天返回与遥感(2014年1期)2014-07-31