
基于系统耦合的水下DOCK 综合特性分析
2023-09-16 09:14刁家宇李卫民袁学庆付松松张凯璇
舰船科学技术 2023年16期
刁家宇,李卫民,袁学庆,付松松,张凯璇
(1.辽宁工业大学 机械工程与自动化学院, 辽宁 锦州121000;2.中国科学院沈阳自动化研究所 机器人学国家重点实验室, 辽宁 沈阳110016;3.中国科学院 机器人与智能制造创新研究院, 辽宁 沈阳110169)
0 引 言
自主式水下机器人(Autonomous Underwater Vehicle, AUV)是一种综合了多种船舶、机械、推进、计算机等先进技术的自主式无人潜器。近年来,因全球对海洋探测要求的不断提高,AUV 被应用于水文观测、海洋监测、地质和生物调查等领域[1]。但是由于AUV 在水下作业中需要消耗大量能源且自身所能携带的能源有限,AUV 每次能源耗尽前必须返回水面工作台进行能源补充,这极大限制了AUV 的海洋环境探测能力,并消耗了大量人力、物力[2]。经过近几年相关领域的探索和研究,发现可以通过在水下建立对接DOCK 的方法解决此类问题[3-5]。
现阶段,国内外学者对AUV 对接进行了一系列相关研究,赵国良等[6]研究了喇叭口式对接系统喇叭口剖面半径与初始中心线偏移量对接驳过程的影响;Tao 等[7]通过多体动力学分析软件对刚度系数、阻尼系数、初始速度、偏移角等因素单独进行研究,得到了以上因素对AUV 接驳过程中碰撞力的影响;Meng等[8]通过流体动力学仿真软件,研究了与捕捉杆式对接系统在捕获时与碰撞力有关的影响因素;Cheng等[9]研究了双体之间水动力的相互作用,得到了2 个物体在不同间隙比、不同雷诺数、不同迎角、不同表面形状下的相互作用力。但是目前还没有对DOCK 对接时进行水下综合特性分析的研究,尤其是没有通过双向流固耦合分析其特性研究,因此对DOCK 对接时进行整体机构的精确特性分析具有一定意义。
AUV 和DOCK 在水下的对接过程是一个极其复杂的过程,这个过程既要考虑DOCK 的变形情况对水流的扰流动影响,又要考虑水流流动对发生形变后DOCK 的冲击影响,因此可以采用双向流固耦合的方法模拟外界条件,双向流固耦合可以通过系统动网格重构展示数字模型的变形情况。同时为了得到准确的瞬态结构场数据,采用接触碰撞法利用多体动力学软件对AUV 与DOCK 的对接过程进行虚拟仿真,确定碰撞载荷的大小。本研究可为AUV 水下对接操作提供技术支持,对水下对接的相关研究具有一定的参考价值。
1 相关设计模型
1.1 DOCK 的数字模型
常见的对接装置可以分为捕捉杆式对接系统、飞机坐落式对接系统和锥形罩式对接系统,现阶段研究最广泛的对接装置依然是基于喇叭口状的锥形导向罩DOCK 对接系统[10]。该类装置通常使用渐缩型的入口装置进行导向,使AUV 进入预定的轨道完成对接。典型的锥形罩式对接系统有美国研发的“REMUS AUV”水下对接系统、哈尔滨工程大学研制的“海灵号”水下对接装置以及中国科学院沈阳自动化研究所、浙江大学、日本东京大学等相关机构研究的项目[11]。根据对以上锥形罩式对接装置的研究,本文设计并改进了一种新型锥形罩式DOCK,该DOCK 可以通过锥形罩对AUV 进行导向,通过对接爪与AUV 进行对接,通过齿轮齿条对中机构对AUV 进行固定,保证AUV 的各个自由度都可以被限制,其新型DOCK 的数组模型如图1 所示。碰撞参数,其碰撞恢复系数为:


图1 新型DOCK 的数字模型Fig.1 A digital model of the new DOCK
1.3 流固耦合物理模型
流固耦合指流体与固体之间的相互作用。流固耦合的基本方程为:
1.2 AUV 与DOCK 接触碰撞的物理模型
通常来讲,接触可以分为法向接触和切向接触2 种。法向接触是面对面的直接接触,其中又分为例如冲压的持续接触和例如碰撞的瞬时接触,而切向接触通常伴随着摩擦接触。AUV 与DOCK 的碰撞属于一种既包含瞬时碰撞的法向接触,又包含库伦摩擦的切向接触的综合接触。对于这种复杂接触,可以采用等效弹簧阻尼法分析AUV 与DOCK 发生对接碰撞时的

虽然普通流固耦合可以满足大部分耦合要求,但是有些对于精度要求较高的耦合系统中,即需要考虑流体对物体产生的影响,又要考虑物体对流体产生的影响,这种考虑综合影响的耦合称作“双向”耦合,双向耦合将计算域分为流体域和瞬态结构域,并通过系统耦合连续地传递作用力,其中流固耦合界面满足的动力条件为:

2 虚拟仿真
2.1 基于ADAMS 的接触碰撞仿真
ADAMS 是MSC 公司开发的多体动力学的虚拟样机仿真软件,是目前最权威的机械系统动力学仿真软件,被广泛应用于虚拟样机测试中,因此选择ADAMS软件进行模拟。
2.1.1 参数选取
可以采用IMPACT 冲击函数模型对AUV 的对接进行研究,IMPACT 定义碰撞的广义函数为[13]:
式中:Fn为法向接触力;k为接触刚度; δ为穿透深度;C为力指数;v为相对速度。根据此模型可以发现,利用IMPACT 定义碰撞需要知道接触力、接触刚度、穿透深度和力指数4 个参数。
接触刚度的Hertz 理论计算[14]公式为:

力指数和材料的非线性程度有关,通常用来计算瞬时法向力中材料刚度项贡献值,根据ADAMS 软件的官方帮助文件可知,该数的范围在1~3 内。对于金属材料,力指数通常可以取1.3~1.5,而对于橡胶材料,力指数通常可以取到2~3。
渗透量为全阻尼时的穿透值,穿越值为0 时,阻尼系数为0。在ADAMS 软件中,可以运用三次STEP函数求解阻尼系数。渗透量与刚度成反相关,与力指数成正相关,该值仍然选自帮助文档。
另外还需注意的是,接触碰撞还要考虑切向接触,切向接触中即需要考虑静摩擦系数 µs和动摩擦系数 µk,这2 个参数与材料的光滑程度有关。
根据本节的研究及其已知条件,可以确定仿真的所有参数,如表1 所示。

表1 仿真确定的参数Tab.1 Parameters determined by simulation
2.1.2 对接仿真
将DOCK 进行简化,去除不必要的对接爪、齿轮齿条对中机构等部件,使之仅保留DOCK 的骨架。通过对AUV 施加初速度、牵引力约束,对DOCK 施加固定约束,对AUV 和DOCK 施加碰撞约束,并测量碰撞力。在ADAMS 中设置完约束后如图2 所示。

图2 对接系统的虚拟样机模型Fig.2 Virtual prototype model of docking system
为了使仿真效果更接近真实情况,在初始状态中,将AUV 与DOCK 错开一定距离,使AUV 接触DOCK 后,由锥形导向罩进行引导对接。运行虚拟样机,并通过ADAMS 自带的测量工具进行测量,得到的数据如图3 所示,可以看出AUV 存在多次碰撞,最终AUV 顺利抵达DOCK 末端完成对接,其中第一次碰撞是AUV 与DOCK 的锥形导向罩的对接,接下来是AUV 与DOCK 中间肋板的碰撞,最后一次是A U V 与D O C K 末端的对接,本文研究的对象为AUV 与DOCK 完成对接时的最后一次碰撞,故选择此参数作为瞬态结构场的外力约束。
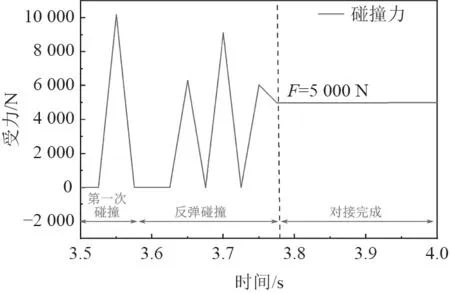
图3 虚拟样机测得的碰撞数据Fig.3 Collision data measured by virtual prototype
2.2 基于系统耦合动网格的双向流固耦合仿真
本节将得出的瞬态结构场条件设置在有限元软件中,并通过系统耦合耦合到流场中,通过系统耦合的物理场,可以同时处理AUV 的碰撞力对水流的扰流动影响和水流流动对碰撞力的影响。本节仿真软件选择Ansys Workbench,相对其他CAE 有限元分析软件,其特点功能全面,可通过工作台将模块进行耦合分析。
2.2.1 瞬态结构场的设置
使用四面体网格划分DOCK 框架,同时将结构复杂的面上进行加密,最终划分为8187 个单元,网格划分情况如图4 所示。通过网格质量检测可以看到网格平均质量大于0.7,因此网格划分质量较好。

图4 DOCK 结构场的网格划分Fig.4 Meshing of DOCK structure field
根据DOCK 实际情况,设置各处约束。将DOCK末端,设置一个接触面为圆的形冲击力,代表AUV 的最后一次碰撞力,输入测试得到的结果;将DOCK 框架的底部设置为固定约束;将DOCK 整个框架设置为流固交涉面,表示整体结构同时受到流场和结构场的影响,并将整体变形、等效应力和等效应变设为待求解。最终,DOCK 的状态如图5 所示。

图5 DOCK 结构场的约束情况Fig.5 DOCK structure field constraints
2.2.2 瞬态流场的设置
由于需要考虑外流场的作用,在流场分析中需要给DOCK 添加外流域。在流场建模中,给DOCK 外侧添加一个六面体作为外流场。同时,划分网格时,除瞬态结构场的操作外,还需划分外流域网格,并在DOCK 表面添加棱柱层网格,最终得到65036 个网格,网格划分情况如图6 所示。平均网格质量大约为0.85,因此整体网格划分质量较好,将各个面命名后完成预处理。

图6 DOCK 流体场的网格划分Fig.6 Meshing of DOCK fluid field field
选择多核并行处理器,进行3D 模型流体求解。选择类应为基于压力,时间为瞬态,选择标准k-ε粘性模型,将外流域材料设置为流体水,水的流速为3 m/s,求解方法为默认,各项残差均为0.001,并将整个DOCK 框架设置为流固交涉面,进行初始化。
为了有更好的观看效果,分别将xz平面和yz平面显示出来,并保留DOCK 框架,隐藏外流域模型,DOCK的最终状态如图7 所示。

图7 DOCK 流体场的约束情况Fig.7 DOCK fluid field field constraints
2.2.3 耦合仿真
建立系统耦合模块,设置数据传输信息,将流场的表面应力添加到瞬态结构场的表面应力;将瞬态结构场的位移形变添加到流场的位移形变中,进行耦合求解。由求解收敛图可以看出耦合效果较好,每个时间步的耦合系数都已收敛,经过求解后,可以得到DOCK 的等效变形图、等效应力图、等效应变图和流场压力图。其中,Workbench 界面的双向流固耦合分析流程图,如图8 所示。
图9 为DOCK 承受的等效变形图、等效应力图、等效应变图。由图9(a)可知,整个DOCK 中,变形最大处为上支撑台,数值为7.0069E-5 m;变形最小处为DOCK 底面,数值为0 m,其中整体趋势为由下到上变形依次增大,这是由于DOCK 的底面为固定面导致的。由图9(b)可知,整个DOCK中,变形最大处为DOCK尾部与下平面的连接处,数值为8.1036E-6 m/m;变形最小处为DOCK 底面,数值为1.997E-9 m/m,其中整体趋势为框架连接处较大,这是由各个框架的疲劳寿命系数决定的。由图9(c)可知,整个DOCK 中,变形最大处为DOCK 尾部与下平面的连接处,数值为1.4688E-6 Pa;变形最小处为DOCK 底面,数值为98.5 Pa,其中整体趋势也为框架连接处较大,这也是由各个框架的疲劳寿命系数决定的。因此应加固DOCK 框架连接处以及上方结构。

图9 DOCK 应力、应变、变形结果云图Fig.9 DOCK stress, strain, deformation results cloud diagram
图10 为DOCK 的内外流场压力云图,其中迎流面压力最大,最大值为4.88E5 Pa,剩余的迎流面压力依次逐渐减小,周围压力比较稳定,基本保持在2.44E5 Pa左右。开始时头部压力较大,之后随着流场稳定压力逐渐低并稳定。因此,应对每个迎流面进行加固,尤其是第一个面。

图10 DOCK 流体压力云图Fig.10 DOCK fluid pressure cloud diagram
3 结 语
本文以设计的一款新型锥形罩式DOCK 为研究对象,对DOCK 对接结果特性进行相对精确的分析。相关结论如下:
1)通过系统虚拟样机仿真得到了AUV 对接过程的瞬态运动及其受力情况,并施加到有限元仿真的结构场中进行流固耦合分析。仅通过基本数据就实现了对对接过程DOCK 状态的综合分析。
2)通过对双向流固耦合的变形云图分析可以发现DOCK 的变形趋势为由上到下逐渐减少,且上方的变形远远大于下方,因此DOCK 上方需要添加更强鲁棒性的材料,以保证DOCK 的稳定性,其材料可以根具变形云图中的具体数值进行合理的搭配。
3)通过对双向流固耦合的应变和应力云图分析可以发现支撑杆和一些垂直板处应力应变较大,且应力应变最大处和最小处分别位于DOCK 的框架及平面的连接处和DOCK 底座处,因此要着重对此连接处进行加固,其加固情况可以根具应应力变云图中的具体数值进行相应的修正。
4)通过对双向流固耦合的内外流场云图分析可以发现DOCK 的迎流面附近的外流场和表面压强较大,数值大约比系统平均压强高一倍,比后方的迎流面压强高1/3 倍,同时迎流面接触面积较大的地方压强也有明显的提升,针对受到水压较大的地方可以根据云图结果的具体数值进行适当的调节。
5)在实际工程中,还可以根据实际需求在Workbench 中添加其他需求解结果,本文所述的方法均可实现求解。
猜你喜欢
昆明医科大学学报(2021年1期)2021-02-07
防爆电机(2020年3期)2020-11-06
中国农资(2019年44期)2019-12-03
名家名作(2017年3期)2017-09-15
光学精密工程(2016年4期)2016-11-07
中华老年口腔医学杂志(2016年5期)2016-03-01
中国继续医学教育(2015年5期)2016-01-07
天津大学学报(自然科学与工程技术版)(2015年10期)2015-12-29
中国光学(2015年5期)2015-12-09
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
