
基于改进免疫算法的装填机械手轨迹规划
2023-09-16 09:49王国涛高崇仁黄江涛田星宇
起重运输机械 2023年17期
王国涛 高崇仁 黄江涛 田星宇
太原科技大学机械工程学院 太原 030024
0 引言
机械手轨迹规划的意义在于确定机械手的运动路径,使其能够完成预定的任务,通过高效、连续且准确的轨迹规划,可使得运行时间达到最优,运行指标更加合理,还可保证机械手的安全性,避免与人员或其他设备发生碰撞,防止事故发生,故对于机械手的研究来说轨迹规划是至关重要的一部分[1]。
随着对机械手轨迹规划研究的逐渐深入,出现了更多高效的优化方法。李骏等[2]研究自主设计的油茶花粉采摘机械臂,提出一种改进粒子群算法,并结合5-5-5多项式插值计算方法对该机械臂进行轨迹规划,验证了改进后算法的适用性和高效性;段倩倩等[3]提出一种改进混合粒子群算法对某六自由度机械手轨迹规划问题进行研究,使用5-7-5 插值多项式构造轨迹曲线,改进后的算法运行时间短,稳定性更强;代瑞恒等[4]采用七次多项式插值对机器人关节轨迹进行优化,提出一种改进量子遗传算法,引入正态分布概率密度函数以改进量子门旋转角步长策略,对关节运行轨迹进行最短时间优化,有效缩短了机械臂关节运动时间;綦慧等[5]提出一种改进鲸鱼算法,并采用五次样条函数拟合关节轨迹,验证了改进鲸鱼算法对解决机械臂轨迹规划多目标优化问题的有效性;李纯艳等[6]提出一种改进麻雀搜索算法用于解决机器人能耗最优轨迹规划问题,采用七次B 样曲线构造机器人在关节空间的轨迹,并通过仿真验证改进后算法的优越性和实用性。
在轨迹规划过程中不仅要保证位移连续,还要实现速度和加速度的连续,防止出现由于运动突变而对机械手造成损害。针对该装填机械手的轨迹规划是为了使得该机械手在约束条件下以运行时间为优化目标,并使得各关节的速度、加速度随时间变化的曲线平滑且没有突变。文中提出基于免疫算法结合七次多项式插值计算方法对自主设计的装填机械手进行轨迹规划,使得该装填机械手运行时间达到最优,各关节速度、加速度曲线平滑且连续。
1 装填机械手介绍
使用五自由度装填机械手去完成目标工作任务。该机械手的样机模型如图1 所示,关节最大速度不超过 2 π/3 rad/s,关节最大加速度不超过 π/2 rad/s2。
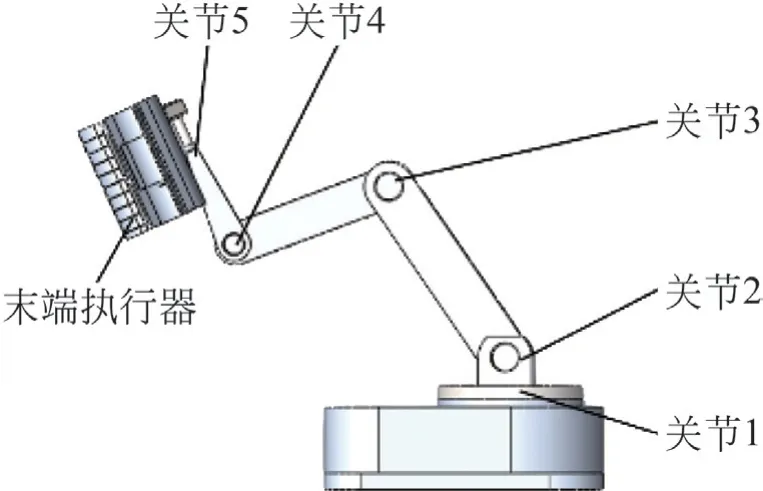
图1 装填机械手样机模型
针对于该机械手有5 个自由度,分别是关节1 和关节5 的回转以及关节2、关节3、关节4 的旋转。对于该机械手来说,末端执行器的抓、放动作和推进动作不会对该装填机械手末端执行器的位姿产生影响,故末端执行器的抓、放和推进不属于该机械手的自由度。该装填机械手的各关节变量范围如表1 所示。
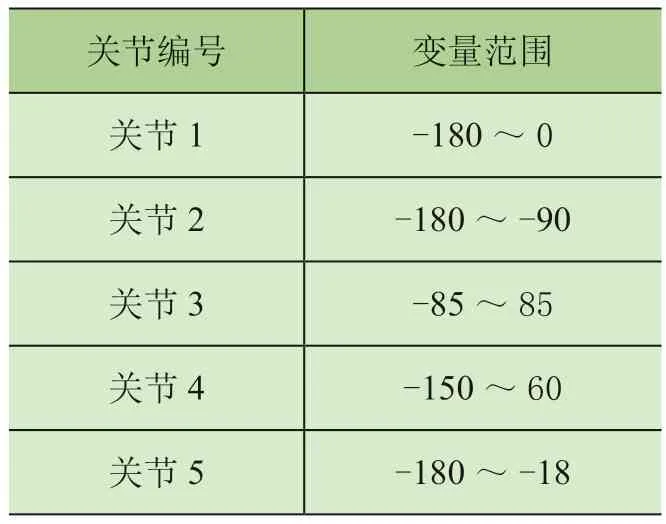
表1 各关节变量范围 (°)
本文对装填机械手的轨迹规划是对该机械手末端执行器在运行过程中的轨迹规划,不需要考虑末端执行器的抓、放以及推进。为了保证该装填机械手运行的平稳性,即机械手各关节位移连续,各关节速度和加速度平滑且没有突变,需要运用合适的方法对其速度和加速度进行规划;为了实现该装填机械手运行时间达到最优,需要以运行时间为优化目标结合智能算法来实现。
对装填机械手进行轨迹规划必须要知道装填机械手的抓取位置和最终位置这2 个关键位置。该装填机械手关键位置如图2 所示。

图2 关键位置示意图
2 基本方法选择
根据轨迹规划所处空间的差异性,可把机械手轨迹规划的方法划分为关节空间轨迹规划和笛卡儿空间轨迹规划。
对于该装填机械手而言,由于自由度相对较多,如果在笛卡儿空间进行轨迹规划,运算量会很大,可能导致控制间隔较长,也会使得控制过程复杂程度高。而在关节空间轨迹规划计算简单且不会发生机构的奇异性,故对于该机械手的轨迹规划选择在关节空间内进行。
考虑该装填机械手运行要求,在轨迹规划过程中需考虑减小各关节的冲击。为减小各关节的冲击,需保证该装填机械手运行过程中速度、加速度不产生突变,故选择七次多项式插值计算方法在关节空间对该机械手进行轨迹规划。对于七次多项式插值来说,基本是在轨迹规划过程中用到的最高项插值计算方法,因为随着次数的增高,所得到的插值结果也会出现与原函数偏离的现象。
在使用七次多项式插值对该装填机械手进行轨迹规划时得到其位移表达式为
多项式系数满足8 个约束条件
式中:θ0为取弹、取药位置的关节角,θf为最终位置的关节角,为取弹、取药位置的角速度,为最终位置的角速度,为取弹、取药位置的角加速度,为最终位置的角加速度。
转换为矩阵形式从而得到θ=Ma,计算出M-1即可求得各关节的位置,也就求出了末端执行器的运动轨迹方程。
3 改进免疫算法
3.1 免疫算法
为了实现该装填机械手运行时间达到最优,需要以运行时间为优化目标结合智能算法来实现,文中基于免疫算法对该装填机械手的轨迹进行规划,使其运行时间达到最优。
免疫算法启发于生物免疫学,其主要是通过对抗有害物质进化出相应的免疫系统,模仿了生物免疫系统中的免疫生成行为,即模拟了生物免疫系统抗原识别、选择、突变、克隆等的行为,以合理提取疫苗为核心,该算法具有较强的全局搜索能力、多样性、强鲁棒性等特点,但是免疫算法也存在一些缺陷。在实际运用中,免疫算法变异方向通常具有随机性,会在个体染色体上随机选择位置并将该位置的基因值进行随机改变,可能会导致迭代速度比较慢,另外对于免疫算法相似度阈值通常设置为定值,相似度阈值的设置对该算法的性能有很大影响,如果相似度阈值设置得太小,会导致抗体群体过于分散,搜索效率低下;如果相似度阈值设置得太大,会导致抗体群体过于集中,可能会出现“早熟”的问题。
免疫算法的流程:
1)抗原识别 即了解该装填机械手的运行轨迹,分析轨迹的可行性,提取先验知识,构造亲和度函数,制定约束条件。
2)产生初始群体 通过代码把轨迹的可行解表示为求解空间的抗体,在该空间内随机产生一个初始群体。
3)计算种群中每一个可行解的亲和度。
4)判断是否满足终止条件 如果满足终止条件,则可以终止算法并输出结果;否则,需要继续进行运算直到满足终止条件为止。终止条件通常包括达到最大迭代次数、目标函数值不再变化或接近某个预定阈值等。
5)计算抗体浓度和激励度。
6)进行免疫处理 包括免疫选择(筛选高质量的抗体并使其活化)、克隆(复制活化抗体)、变异(对克隆后的副本进行变异操作,使其发生亲和度突变)和克隆抑制(对变异结果进行选择,保留亲和度高的抗体)。
7)种群刷新 用随机生成的新抗体代替激励度较低的抗体,形成新群体,继续计算每一个可行解的亲和度,并不断循环该操作,直至满足终止条件输出结果。

图3 免疫算法流程图
3.2 免疫算法的改进
针对免疫算法变异方向的随机性以及相似度阈值为定值这2点所引起的算法性能较低,本文做出了如下改进。
1)改进1 基于变异方向的改进,改进前免疫方向随机,改进过后使得变异朝着最优粒子方向变异,增大了优质粒子的生成概率,提升了前期迭代速度。
改进前的公式为
改进后的公式为
式中:rand为[0,1]中的随机数。
通过对比改进前后,粒子向着最优粒子方向靠近的速度,对比如图4 所示,可以明显看出改进后的粒子向着最优粒子靠近的速度更快。
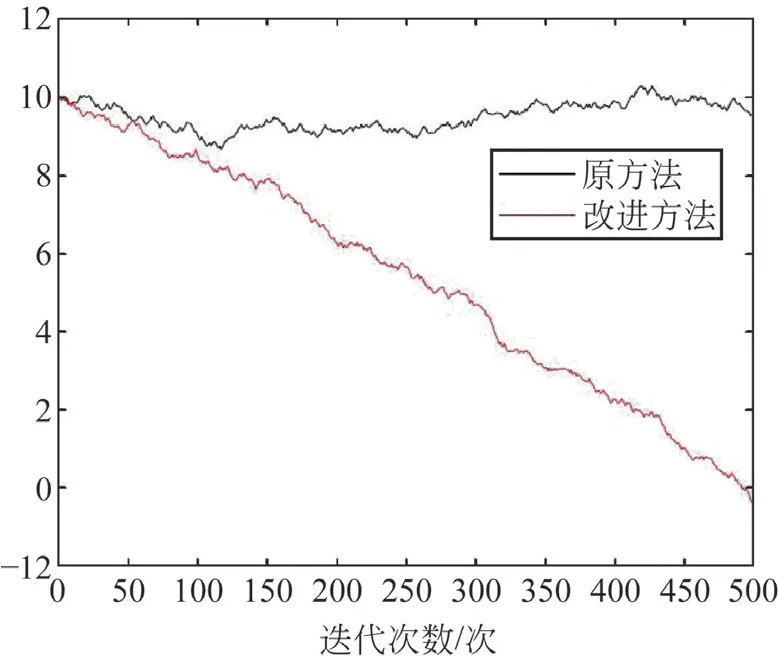
图4 改进变异方向前后对比
2)改进2 基于相似度阈值的改进,改进前相似度阈值为定值,改进后变为随迭代次数而改变。改进后的相似度阈值随着迭代次数的增加而减小,前期可以保证粒子种类的多样性,避免“早熟”,后期可以保证寻找收敛的快速性,提高寻优能力。
改进后的公式为
教师的招聘、培训、教学基金、教学风格、教学效果、服务的研究;美国药学院校教师素质与院长学术概况;药学院的教师工作量;美国药学院校教师的种族与民族表征;使用社交媒体平台的新型教师发展计划;促使教师使用以证据为基础和以学生为中心的教学策略;指导非药剂师教师参加药房实习;在各医疗卫生专业培训计划中教师跨职业教育(IPE)面临的益处和挑战;教师发表的学术著作的数量及其潜在的影响;学生对教师聘任过程的看法,对教师的满意度及评价。近年来的研究趋势是鼓励药学生成为高素质的教师,进行学术研究以及推动教师的全面发展。
式中:exp 表示e的次方,如exp(a)表示e的a次方。
改进后的相似度阈值变化曲线如图5 所示。可以看出在迭代初期采用了较大阈值,这样会增加粒子的多样性,而随着迭代次数的增加,相似度阈值变小,这样就会增加寻找最优粒子的速度。改进后的免疫算法将实现对该装填机械手运行时间最优的。

图5 改进后相似度阈值变化曲线
4 仿真结果及分析
轨迹规划是在对该装填机械手运动学分析的基础上完成的,本章轨迹规划是对该装填机械手从取弹、取药位置到最终位置过程中末端执行器的运动轨迹进行规划,根据该装填机械手的工作流程安排,明确该装填机械手末端执行器在取弹、取药位置和最终位置时的位姿。
由于该装填关节2 仰起是一个单一的过程,所以在对该自动装填机械手的轨迹规划初位置是该机械手关节2 仰起以后的位置,关节2 先仰起是为了防止在机械手运行过程与药筒产生干涉或碰撞。
轨迹规划初位置各关节角度为:关节1:θ1=0°;关节2:θ2=-144.7°;关节3:θ3=-51.58°;关节4:θ4=43.2°;关节5:θ5=0°。
轨迹规划最终位置各关节角度:关节1:θ1=-180°;关节2:θ2=-144.7°;关节3:θ3=41.4°;关节4:θ4=-133°;关节5:θ5=180°。
用改进前与改进后的免疫算法分别对该自动装填机械手进行时间最优轨迹规划,通过仿真实验得到对比图如图6 所示。
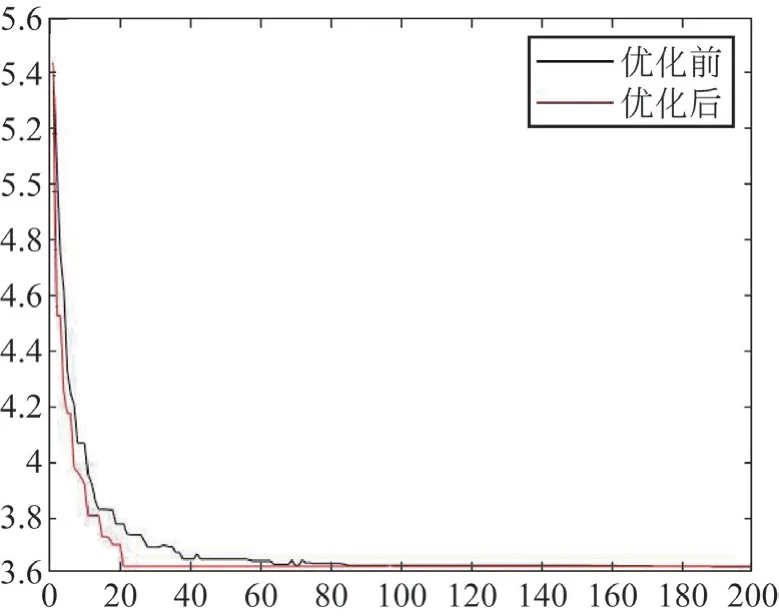
图6 算法改进前后对比图
可以看出改进后的免疫算法要优于改进前的免疫算法,改进后的算法向着最优粒子靠近的速度更快,效率更高,性能更好。
基于改进后的免疫算法结合七次多项式插值计算方法对该自动装填机械手进行轨迹规划,通过仿真实验得到该机械手各关节位移、速度、加速度随时间变化的曲线如图7 所示。

图7 优化后关节运动轨迹
由所得的曲线可以看出该装填机械手的位移连续且满足该机械手的运行要求,该机械手各关节速度及加速度均不超过关节最大允许量。
该装填机械手在运动学约束满足的前提下,基于改进过后的免疫算法结合七次多项式插值计算方法对该机械手的运行轨迹进行规划,完成规划过程所用的时间从5.51 s 减少到3.703 s,使该机械手在整个工作过程中时间缩短。缩短了该装填机械手的运行时间,提高了该装填机械手的工作效率,验证了基于改进免疫算法的时间最优装填机械手轨迹规划方法的可行性与高效性。最后得到该装填机械手在三维空间内的末端执行器的运动轨迹如图8 所示。
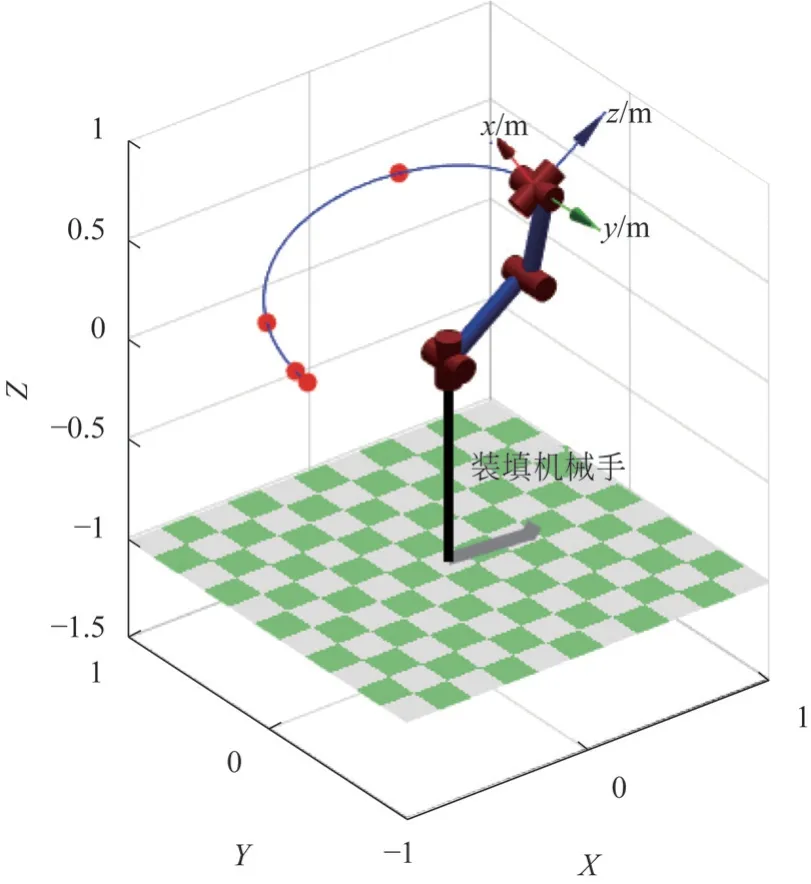
图8 装填机械手运动轨迹
5 结论
针对自主设计的自动装填机械手轨迹规划问题,以运行时间为优化目标提出一种改进的免疫算法,并基于改免疫算法结合七次多项式插值计算方法对该自动装填机械手进行轨迹规划,结合Matlab 仿真实验得到以下结论。
针对免疫算法方向变异的随机性和相似度阈值为定值引起的弊端,文中做出2 点改进。基于变异方向的改进使变异朝着最优粒子方向变异和基于相似度阈值改进使其随着迭代次数的增加而减小,使该算法向着最优粒子靠近的速度更快,效率更高,提高了算法的性能;以自主设计的自动装填机械手关节动作最优时间为优化目标,仿真结果显示优化前后时间缩短了32.79%,提高了机械手的运行效率,验证了算法的有效性。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26
西南石油大学学报(自然科学版)(2019年1期)2019-01-28
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年9期)2017-11-27
通信电源技术(2016年1期)2016-04-16
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年14期)2016-04-11
机电信息(2015年3期)2015-02-27
