一种新型生物融合式腰椎外骨骼的设计及评估
2023-09-18 14:18杜世珍王道雨喻洪流
机械设计与研究 2023年3期
杜世珍, 石 萍*,,2, 王道雨, 简 卓, 喻洪流,2
(1.上海理工大学 康复工程与技术研究所,上海 200093,E-mail:pshi@usst.edu.cn;2.上海康复器械工程技术研究中心,上海 200093;3.上海卓道医疗科技有限公司,上海 201210)
1 背景
康复外骨骼技术在康复医疗、工业制造、民用消费等领域发展迅速[1-4]。在康复医疗中,外骨骼机器人能够替代康复治疗师繁重而重复的康复训练任务[5-6]。开发轻量化,小巧化的康复外骨骼机器人在患者日常生活中的应用,将极大地提高康复训练的效率,其辅助功能还能极大地方便患者的生活。
近年来,各种躯干外骨骼开发出来用于脊柱的康复训练和日常助力功能。 Takuya等[7]为了减轻人体下背部在搬运货物时的负担,开发了一种叫做“肌肉套装”下背部支撑外骨骼,由连接大腿和腰部的旋转机构,以及名为McKibben人工肌肉的弹性执行器,空气压缩机等组成,通过弹性执行器,为弯腰搬运重物的人,提供一定举起重物的辅助力。文献[7]通过表面肌电图,对人体在搬运重物时的肌肉使用率进行了评估,验证了“肌肉套装”下背部支撑外骨骼对人体在搬运重物时具有辅助作用。文献[8-9]开发出了一种缆索驱动的并联腰部康复机器人,通过一种创新的两级控制算法对缆索拉力进行精确控制,实现人体腰部康复训练和助力功能。文献[10-11]为了减少与负重相关的腰部疼痛与损伤的发生,提出了一种上身可穿戴装备,通过对人体背部称为“第二脊柱”的设计以及两个电缆驱动模块,调节电缆张力能够将肩部的负载转移到骨盆,减轻在负重时肩部所承受的压力。文献[12]提出一种可重构脊柱外骨骼,由多个控制阻力与运动范围的联轴器组成,能够为佩戴者提供有效的支撑与增强。上述腰椎外骨骼目前还处于实验室研究,目前亟待开发小型化、轻量化的家庭康复助力腰椎外骨骼。
腰椎外骨骼与人体之间是协调与交互的关系。作者设计了一种生物融合式的腰椎外骨骼,以帮助腰痛患者减轻腰部压力,并进行腰部康复训练与助力。作者基于上述设计进行了工程样机的研制,样机设计充分考虑了穿戴的便携性,美观性、实用性的特点。本文结构如下:第二节中介绍了所提出腰椎外骨骼的机械结构,并进行了运动学分析;第三节介绍了腰椎外骨骼控制系统的结构;第四节为腰椎外骨骼的样机研制,包括样机的整体设计,外观设计,控制器设计;第五节通过实验验证了腰椎外骨骼对人体腰部的辅助作用;第六节进行了总结。
2 机械结构设计
生物融合式康复机构作为一种新型的机构类型,将刚性的机械机构与柔性的人体机构结合,是符合生物运动方式的刚柔耦合机构[13-15]。本文所述的新型生物融合式腰椎外骨骼机构是符合人体腰部生理结构和运动形式的空间闭环结构,其中,人体骨盆、胸椎节段等效为机构上、下平台,脊柱在骨盆与胸椎节段之间的运动形式可等效为球面副形式;机械机构由4个SPS串联机构与人体机构上下平台连接构成的并联机构组成。此时,人机闭环可用S/4-SPS表示,人体机构为串联结构形式,两端分别与机械机构相连,腰部的绕矢状轴,冠状轴和垂直轴的前屈后伸,左右侧屈以及旋转等运动由并联机械结构带动腰部实现,其腰部训练角度由并联机械结构的输出位姿决定。
腰椎外骨骼结构示意图如图1所示,定平台与驱动支链一端的连接点为Ai(i=1,2,3,4),定平台通过连接点Bi(i=1,2,3,4)与驱动支链另一端连接,以定平台中心P为原点建立定坐标系P-xyz,x轴沿A1A2方向,y轴沿A1A4方向,z轴垂直于定平台方向向上,接着以动平台中心K为原点建立动坐标系K-xyz,x轴沿B1B2方向,y轴沿B1B4方向,z轴垂直于动平台方向向上。

▲图1 腰椎外骨骼结构示意图
通过采用Z-Y-X型欧拉角得到动坐标系相对于定坐标系的旋转矩阵为
(1)

为了求得在不同角度α,β,γ下的驱动支链长度Li,根据封闭环方法以及旋转矩阵的坐标变换,得到驱动支链长度矢量:
(2)
变换得到
(3)
其中:Li和AiBi都表示驱动支链的矢量,PK表示动坐标系K-xyz的原点K相对于定坐标系P-xyz原点P的位置向量,KBi表示在动坐标系K-xyz下Bi点相对于动坐标系K-xyz原点K的位置矢量,PAi表示在定坐标系P-xyz下Ai点相对于定坐标系P-xyz原点P的位置矢量。因此,驱动支链长度为
(4)

▲图2 腰椎外骨骼结构
参考正常人身体尺寸与人体腰部运动范围,腰椎外骨骼结构设计如图2所示。
3 控制系统设计
腰椎外骨骼控制系统如图3所示。
通过腰椎外骨骼机械结构以及控制系统,腰椎外骨骼能够对腰椎患者进行腰部助力与牵引康复训练。腰椎外骨骼的控制系统主要由人机交互模块,通讯模块,位置传感器模块,压力传感器模块,信息处理模块,主控制模块,电机驱动模块七个模块组成。
位置传感器模块主要由陀螺仪与电动推杆内部的电位计组成,陀螺仪位于人体腰部位置,用于采集腰部所处位置的偏航角,横滚角,俯仰角及其角加速度等姿态信号,电位计用于采集电机所处的位置信号。压力传感器模块由四个压力传感器组成,用于采集腰椎外骨骼在与人体交互过程中各个电动推杆所受的压力信号。电机驱动模块由位置控制器与力控制器组成,位置控制器与电位计产采集的位置信号构成控制内环,控制腰部助力模式,力控制器与压力传感器采集的压力信号构成控制外环,内外环的混合控制用于牵引康复训练。控制系统框图如图4所示。

▲图3 腰椎外骨骼控制系统

▲图4 控制系统框图
4 样机研制
4.1 样机整体结构设计
腰椎外骨骼样机由腰椎外骨骼主体和遥控器组成。腰椎外骨骼外观设计图和实物图如图5,腰椎外骨骼的机械结构主要由腰部组件、骨盆组件以及四个推杆电机组成,腰部组件包含两个符合人因工程学设计的弧形支撑板,贴合人体腰部轮廓,弧形支撑板内侧铆接有完全覆盖支撑板大小的尼龙腰部绑带。使用开合式魔术贴,能够方便快捷地穿戴腰椎外骨骼。腰部绑带中部的伸缩式卡扣,能够调节腰部绑带尺寸。两个腰部支撑板外侧分别连接有两个铝合金制造的万向节,万向节连接推杆电机上端。骨盆组件与腰部组件构成基本类似。

▲图5 腰椎外骨骼样机外观
4.2 外观设计
腰椎外骨骼整体配色主要由白、银、黑三种颜色组成,黑色的色彩主要用于腰部绑带与骨盆绑带,给人以一种结实可靠感。白色色彩用于腰部与骨盆支撑板,以及腰部与骨盆绑带的边缘位置,白色对于环境的融合性较高,能够给人一种干净,简约感。银色的色彩来自电动推杆,万向节和其他一些小零件,银色给人带来一种金属的质感、典雅的心理感受。通过白、银、黑的颜色搭配,腰椎外骨骼整体的形态表现简约,有立体感,结实耐用。
腰椎外骨骼的腰部与骨盆支撑板由ABS树脂通过3D打印制作而成,符合人体生理曲度,重量轻。腰部与骨盆绑带由尼龙布料制作而成,拥有较好的韧性与耐磨性,便于牢牢固定使用者的腰部与骨盆。万向节及其他零件使用铝合金加工而成,具有较好的强度、刚度及耐腐蚀性。电动推杆使用Actuonix公司的P16电机,最大驱动力可达400 N,能够满足对使用者的训练需求。
4.3 控制器设计
遥控器组成及其操作界面如图6所示。遥控器机身采用ABS塑料材质,绝缘性好,重量轻,尺寸适合单手持握。遥控器按键采用硅胶材质,触感舒适,结实耐用。遥控器整体设计圆润、简约,白色机身搭配黑色,少许蓝色,科技感强。腰椎外骨骼的牵引速度可设置范围为5 mm/s~9 mm/s,牵引力可设置范围为(0~400)N,训练时长可设置范围为1 min~30 min,供使用者按自己的需求设置。
腰椎外骨骼正确穿戴情况如图7所示,并对穿戴者进行腰部助力和牵引康复训练。腰椎外骨骼穿脱方便,可适用于多种体型的人穿戴,穿戴者腰围范围为75 cm~95 cm。

▲图6 遥控器及其操作界面流程
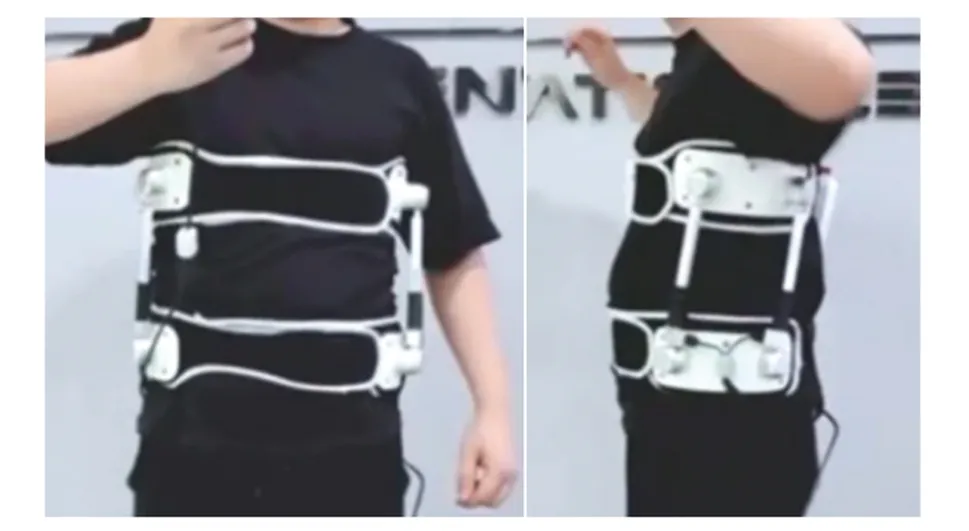
▲图7 样机穿戴的前视和侧视情况
5 实验评估
为了验证穿戴腰椎外骨骼对人体腰部的辅助效果,通过助力实验研究在穿戴该腰椎外骨骼处于牵引与不牵引状态下的腰部肌肉表面肌电信号。本研究采用积分肌电值(IEMG)来评估在穿戴腰椎外骨骼时对人体腰部有无辅助作用[16]。在助力实验中,当举起相同的重物时,人体在穿戴腰椎外骨骼处于牵引状态下的IEMG值相较于穿戴腰椎外骨骼处于不牵引状态下的IEMG值小,那就可以证明腰椎外骨骼减少了腰部肌肉的使用情况,对人体腰部有辅助作用;反之则没有辅助作用[17]。
(1) 受试者
研究对象为3名男性健康成年人(受试者A、B、C),根据调查显示,相关实验者没有腰部受伤以及腰部疾病史。在开始实验前,对实验的相关内容和相关风险进行了充分的说明,并向受试者讲解腰椎外骨骼的穿戴方法,帮助受试者穿戴,并按照实验要求进行一定的举重练习。受试者的身体参数如表1所示。
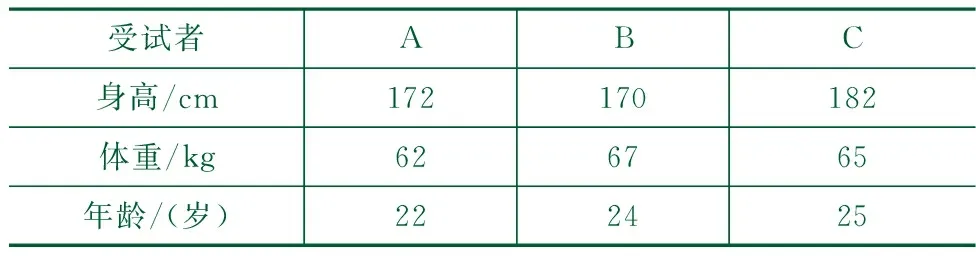
表1 受试者身体参数
(2) 肌肉选取
如图8所示,选取人体背部两对肌肉:胸竖脊肌、腰竖脊肌作为肌电信号测量位点。由于每个人的日常生活习惯使然,在搬举重物时人体两侧对称的肌肉收缩情况不同,两侧对称的肌肉产生的表面肌电信号大小可能存在较大差异,因此通过对相同肌肉在左侧产生的肌电信号与右侧产生的肌电信号值作平均处理,用来评估每一块肌肉所产生的肌电信号大小。

▲图8 肌肉选取位置示意图
(3) 实验步骤与方法
通过对比腰椎外骨骼处于牵引状态和不牵引状态下,人体搬运不同质量的重物所产生的表面肌电信号大小来评估腰椎外骨骼的辅助作用,进行了如图9所示的实验。受试者在前5 s处于准备状态,双手搭在重物两侧,并使背部肌肉处于静息状态,然后在随后的5 s内将重物举到一定高度,在此高度保持静止5 s,随之在5 s内放下重物,并之后保持放松状态5秒,记录实验数据,并让受试者休息2 min。受试者在穿戴腰椎外骨骼并在其处于牵引状态和不牵引状态下分别搬举重量为5 kg,7.5 kg,10 kg的重物,并分别重复10次。

▲图9 实验步骤示意图
(4) 数据处理
对于采集到的每块肌肉的表面肌电信号原始测量数据,通过(10~500)Hz带通滤波器和50 Hz陷波滤波器对原始肌电信号进行预处理,全波整流后计算肌电信号的IEMG值作为评估肌肉使用情况的指标, IEMG值计算公式如下:
其中:τ为时间常数,(-T,T)为计算区间。
(5) 结果
如图10表示的是在分别搬举5 kg、7.5 kg和10 kg重物下三位受试者的IEMG值。由图10中各个受试者在穿戴腰椎外骨骼处于“牵引”与“未牵引”状态时腰竖脊肌和胸竖脊肌的肌电信号值可知,随着搬举重物重量的增加,三位受试者的LES与TES的IEMG值的大小都会增加,总体来说,LES的IEMG值大小普遍强于TES的IEMG值大小,并且LES与TES在腰椎外骨骼处于牵引状态下的IEMG值大小普遍比在腰椎外骨骼处于未牵引状态下的IEMG值大小有所降低。对于实验者1来说,在搬举相同重量重物的情况下,LES的IEMG值大小显著强于TES的IEMG值大小(P<0.001)。LES在腰椎外骨骼处于牵引状态下的IEMG值的大小比在腰椎外骨骼处于未牵引状态下的IEMG值的大小有显著降低(P<0.001)。随着搬举重物重量的增加,LES的IEMG值大小有显著增加(P<0.001)。对于实验者2来说,在搬举相同重量重物的情况下,LES的IEMG值显著强于TES的IEMG值(P<0.001)。在搬举5 kg和7.5 kg重物时LES在腰椎外骨骼处于牵引状态下的IEMG值的大小比在腰椎外骨骼处于未牵引状态下的IEMG值的大小有显著降低(P<0.001),在搬举5 kg重物时TES在腰椎外骨骼处于牵引状态下的IEMG值的大小比在腰椎外骨骼处于未牵引状态下的IEMG值的大小有显著降低(P<0.001)。在搬举重物的重量由5 kg增加至7.5 kg后,LES的IEMG值的大小有较为显著的增加(P<0.05),在搬举重物的重量由7.5 kg增加至10 kg后,LES的IEMG值的大小有显著增加(P<0.001)。对于实验者3来说,在搬举相同重量重物的情况下,LES的IEMG值显著强于TES的IEMG值(P<0.001)。在搬举5 kg重物时LES在腰椎外骨骼处于牵引状态下的IEMG值的大小比在腰椎外骨骼处于未牵引状态下的IEMG值的大小有显著降低(P<0.001),在搬举7.5 kg重物时TES在腰椎外骨骼处于牵引状态下的IEMG值的大小比在腰椎外骨骼处于未牵引状态下的IEMG值的大小有显著降低(P<0.001),在搬举10 kg重物时LES在腰椎外骨骼处于牵引状态下的IEMG值的大小比在腰椎外骨骼处于未牵引状态下的IEMG值的大小有较为显著降低(P<0.05)。随着搬举重物重量的增加,LES的IEMG值大小有显著增加(P<0.001)。

▲图10 三位受试者的IEMG值(其中“未牵引”表示受试者穿戴腰椎外骨骼没有牵引的状态;“牵引”表示受试者穿戴腰椎外骨骼牵引的状态;“LES”表示腰竖脊肌,“TES”表示胸竖脊肌。)
(6) 讨论
由实验结果可知,IEMG值大小可以一定程度反应出人体背部肌肉的使用情况,在举重过程中人体背部对肌肉LES的使用率较肌肉TES的使用率较强。随着搬举重物重量的增加,三位受试者的LES与TES的IEMG值的大小都会增加,意味着随着外部负载的增加,人体需要调动更多的肌肉力量去抵消外部负载的作用。同时,通过比较在搬举相同重物下的腰椎外骨骼处于牵引和不牵引状态下的IEMG值可知,在穿戴腰椎外骨骼牵引状态下的肌肉使用情况,相较于穿戴腰椎外骨骼不牵引状态下肌肉使用情况有所降低。因此,由实验结果可知使用腰椎外骨骼能够有效降低人体腰部负荷,减缓腰部压力,从而为腰部疼痛患者减轻腰部疼痛。
本研究也存在一些不足之处,参与实验的人数不足,不能对腰椎外骨骼的辅助效果做出定量化的分析,未能对腰椎外骨骼对人体腰部的辅助力大小做出具体评估。实验结果中,受试者在穿戴腰椎外骨骼处于“牵引”与“未牵引”状态时胸竖脊肌(TES)的肌电信号值变化不显著,可能存在的原因是由于在采集表面肌电信号时,腰椎外骨骼的绑带与采集表面肌电信号的采集电极触碰所导致采集到的TES处表面肌电信号值不准确所导致。在后续的工作中,我们会增加受试者的数量,分析腰椎外骨骼对人体辅助力的大小,并探究腰椎外骨骼对腰部疼痛患者的具体辅助效果。
6 结论
本文提出了一种新型生物融合式腰椎外骨骼的设计及其辅助作用评估。首先设计了其机械结构,并分析了其运动学逆解。接着介绍了其控制系统结构,通过力控制器和位置控制器能够对腰椎患者进行腰部助力与牵引康复训练。在腰椎外骨骼样机研制中,通过工业设计对腰椎外骨骼样机整体结构与控制器功能进行设计,优化使用者的穿戴体验。最后,为了评估腰椎外骨骼对人体的辅助作用,设计了举重实验,在举起重物过程中通过采集人体背部两对肌肉:胸竖脊肌、腰竖脊肌的肌电信号,比较其IEMG信号的大小,实验结果表明穿戴腰椎外骨骼能够降低人体腰部肌肉使用情况,验证了所设计的腰椎外骨骼对人体腰部具有辅助作用。
猜你喜欢
成都信息工程大学学报(2021年4期)2021-11-22
小哥白尼(野生动物)(2021年12期)2021-03-29
高师理科学刊(2020年2期)2020-11-26
科技传播(2019年24期)2019-06-15
发明与创新·中学生(2018年10期)2018-10-15
北京航空航天大学学报(2017年9期)2017-12-18
家庭百事通·健康一点通(2017年9期)2017-09-22
中学生数理化·八年级物理人教版(2016年2期)2016-04-07
石油化工建设(2015年6期)2015-12-01
发明与创新(2015年25期)2015-02-27