
中小型共光路系统支撑结构设计和分析
2023-09-21 04:38杨晓强陶忠刘莹奇
应用光学 2023年5期
杨晓强,陶忠,刘莹奇
(西安应用光学研究所,陕西 西安 710065)
引言
为满足小型化、轻量化和远距离目标的探测跟踪需求,共光路系统广泛应用于各种先进的机载光电稳瞄系统中。共光路远距离探测光电成像技术采用一体化的设计理念,将近红外电视、短波红外、中波红外等多谱段探测器件进行综合集成,共用一个望远镜系统,具备集成度高、分辨率高、口径大、焦距长等特点。通过一体化共光路设计,突破了光学系统体积尺寸对传感器性能的限制,在实现远距离成像探测的同时可有效减小系统的体积和重量,实现光电系统性能的最优化。国外对机载共光路系统的研究较早,根据公开的宣传资料可以看出,美国FLIR 公司的Star SAFIRE380X光电瞄准系统、美国Raytheon 公司的全球鹰光电广域监视系统、“捕食者”无人机MTS-B 光电系统和加拿大L-3 WESCAM 公司的MX-20、MX-25 等均采用了共光路光学系统[1],说明其相关技术已经相当成熟,但所采用的相关光机设计细节未见文献报道。韩国 LEE J H 等利用有限元和光机一体化程序分析了一个300 mm 口径的可见光和红外共通道机载光电系统,其温度变化范围只有±20 ℃[2]。YODER 和ANEES 等人总结了各种光机设计方法,并介绍了两种整个光机结构采用同一材质实现无热化设计的全金属化主次镜及其支撑系统[3-4]。国内目前尚未见批量装备的共光路机载光电产品的公开报道。关于共光路光机设计及仿真,以地基大口径望远镜和空间望远镜为主,机载产品相对较少。地基望远镜和空间望远系统有完善的温控措施,其温度变化范围通常很小。罗致帮等设计了空间816 mm 口径SiC 主镜及其支撑结构,并对主镜组件进行了仿真及试验验证,但是温度变化范围只有2 ℃,并且文章只对主镜进行了面型分析,并未分析面型变化引起的光学系统成像质量变化情况[5]。王克军设计了某天基望远镜的背部三点支撑结构,并对其进行了有限元分析,但是温度变化范围只有4℃,同样没考虑整个面型变化对整个光学系统带来的影响[6]。程志峰等利用光机热集成分析研究了某机载可见光、中波红外共口径光机系统,其温度适应范围只有±5 ℃[7]。李猛等研究了口径为136.6 mm,用于机载光谱仪离轴金属铝反射镜的柔性支撑方法,系统处于恒温,未研究温度变化带来的影响[8]。魏梦琦等对某机载光电系统的SiC 主镜进行了轻量化设计,文中仅分析了重力对主镜面型的影响,未给出主镜的温度适应性情况[9]。
本文针对需要在-40 ℃~65 ℃温度范围内工作的机载共光路系统(工作温差±60 ℃,温度梯度10 ℃),进行了主、次镜和支撑结构的材料匹配及支撑结构柔性无热化设计,运用光机一体化仿真技术分析了主、次镜面型变化对整个光学系统成像质量的影响,并对系统的刚度进行了模态分析评估。
1 系统简介
某机载共光路光学系统采用多波段共口径望远镜的设计思路,采用卡塞格林望远镜形式,多波段传感器采用棱镜分光。为了节省时间,减少计算量,此处取其中对反射镜面型要求最高的的一路进行研究,其光学系统示意图如图1 所示。设计完成后的光学指标如图2 所示。其中中心视场相面波前为0.008 8λ(λ=632.8 nm),各视场点列斑小于艾里斑,系统MTF(modulation transfer function)@63 lp/mm 优于0.45。

图1 光学系统示意图Fig.1 Schematic diagram of optical system

图2 初始状态的光学指标Fig.2 Optical indexes of initial state
2 支撑结构设计
共光路系统若要清晰成像,就需要在各种载荷环境下保证各光学元器件的面型、相对位置和姿态变化在设计许可范围内。对本系统来说,温度环境最为苛刻,需要在-40 ℃~+65 ℃温度范围内工作,相比20 ℃的装配温度,最大温差±60 ℃。相对来说,光透射光路部分对温度变化的敏感度要远低于反射式共光路的主、次镜部分。本文的研究集中在宽温度范围内工作的共光路卡式系统的支撑结构设计及分析评估。为保证卡式系统的宽温度适应性,可采取的方法有:
1)采取温控措施;
2)合理选择主、次镜及支撑结构的材料,使其热匹配较好;
3)合理选择胶的种类和胶层厚度等;
4)对主、次镜支撑结构进行柔性化设计。
若采取温控措施,则需要添加大量的环控设备,系统的功耗和重量均会增加很多,开发成本很高且带来可靠性降低。光学材料的导热性通常很差,需要较长时间才能达到热稳态,同时容易形成各种温度梯度,本文不选用温控措施。对于支撑和反射镜粘接所用的胶来说,不同文献里推荐的胶的种类、特性及粘接工艺均有所区别,出于商业考虑,很多细节均未提及[10-12]。理论上存在一个可以实现径向方向上无热化的最优胶层厚度[9-11],然而无热化计算出来的胶的厚度经常难以满足粘接工艺需求,无法保证粘接质量和强度。除厚度外,胶层粘接位置、长度和宽度均会对反射镜面型产生不同的影响[13-14]。出于篇幅考虑,本文不对上述问题进行展开研究。本系统采用某室温硫化硅橡胶进行粘接,胶层厚度选取0.5 mm,周向8 点粘接。综合以上考虑,本文主要对主、次镜和支撑结构材料进行选择,以及对支撑结构进行柔性设计,以达到在宽温度范围内具有适应性的目的。
常用的反射镜镜体材料及特性如表1 所示。根据材料的性质可分为:以Zerodur 和ULE(超低热膨胀)为代表的光学玻璃材料,以Al 和Be 为代表的金属材料,以SiC 为代表的陶瓷材料以及新型复合材料等。SiC 陶瓷具有优异的抗震、耐高温、高导热、高比刚度及热稳定性好等特性,广泛应用于大口径空间光学系统中。但其制造难度大,成本高,国内仅有少数厂家掌握其制备工艺,此处不选用。Be 和Al 等金属材料,具有很高的导热率和比刚度,可轻易地进行各种构型的减重设计。然而,Be 需要特殊制备工艺,成本高,此处不选用。Al 作为常用结构材料,虽然热膨胀系数大,但是很容易跟周边结构实现热膨胀系数匹配,是一种理想的反射镜材料。对于需要在宽光谱范围内工作(特别是可见光波段)的光学系统来说,需要通过复杂的表面镀层和镀膜处理,目前相关工艺尚不成熟,此处不采用。常用的支撑材料及其性能如表2 所示。从表2 可知,SiC/Al 复合材料可以根据体份的不同兼顾热膨胀系数和刚度,并具有优良的导热性和高强度,但其加工难度大、成本高,此处不采用。铝合金和镁合金因热膨胀系数大,与反射镜材料难匹配。通过以上考虑,最终选取殷钢和ULE 配对,钛合金和K9 配对,后面将采用光机集成分析对这两种配对的优劣展开详细分析。

表1 常用反射镜材料及性能Table 1 Commonly-used mirror materials and properties
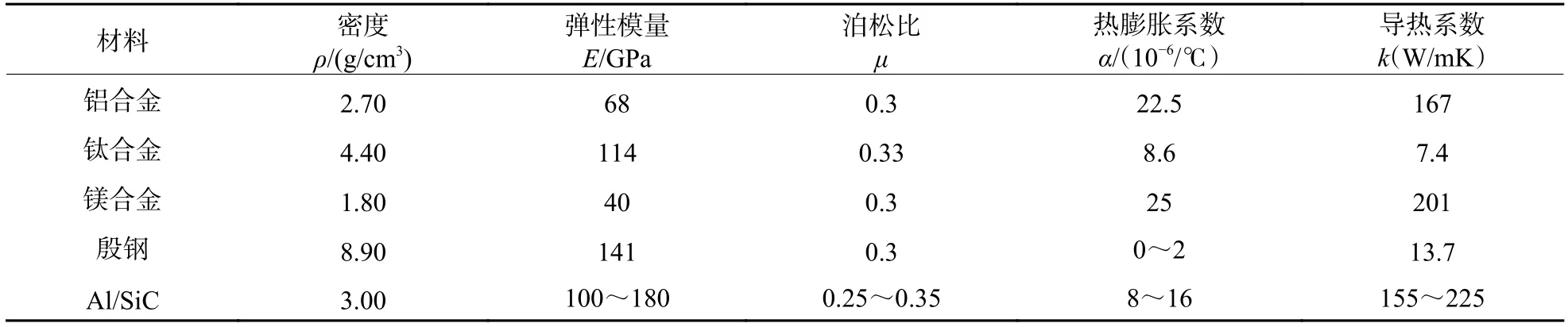
表2 常用光学支撑结构材料性能Table 2 Commonly-used optical support structural materials and properties
由于需要在-40 ℃~+65 ℃温度范围内保证主次镜的位置、姿态及面型,尽管前面已经对镜体和支撑材料进行了热膨胀系数的匹配,但是计算和实践均表明在很大温度范围内工作时,反射镜仍会因为热膨胀系数的差异产生畸变,影响成像质量[15]。为了进一步降低反射镜畸变,对支撑结构进行柔性化设计是一个不错的选择。根据不同的使用目的及设计经验,可以采取各种柔性方式[3,15-16]。本文采用悬臂弹片形式,主要对支撑结构的径向进行柔性化,保证其余方向的刚度。通过多轮迭代确定了弹簧片的悬臂长度和厚度,以及主镜的轻量化形式,其迭代过程不是本文的重点,此处不作展开论述。次镜支撑采用与主镜相同的柔性化支撑方式,最终设计完成的结构如图3 所示。

图3 结构模型和有限元模型Fig.3 CAD model and FEM model
3 光机集成分析
采用光机集成分析可以有效评估各种载荷组合下结构变形对光学系统性能的影响。光机集成分析的基本思路是,将有限元计算出的镜面节点位移进行数据拟合,转换成光学软件可以接收的数据,导入光学设计软件中评估镜面位姿和面型变化对成像性能的影响。最常用的数据拟合方式为刚体位移拟合和Zernike 多项式拟合[17-18]。对有限元数据进行拟合可采用商用软件Sigfit[16-17]或利用Matlab 或Vc++自编程序[19-21],需要在多个软件之间进行多次数据交互,操作复杂,容易出错。本文利用ANSYS 自带的编程语言APDL(ANSYS parametric design language)和Zemax 自带的编程语言ZPL(Zemax programming language)对两者进行二次开发,自动化完成光机转换和数据导入,减少了中间环节和出错率,提高了计算效率。利用的软件版本为ANSYS15.0 和Zemax 13.0,光学模型见图1 所示,有限元模型和所采用的坐标系见图3 所示。在图3 所示的螺钉固定孔处添加相应的约束。
3.1 60 ℃均匀温差下系统光学指标
该系统需要在-40 ℃~+65 ℃温度范围内工作,相比20 ℃装配温度,最大温差60 ℃。首先评估两种材料组合在60 ℃温差下主、次镜面型和光学指标的变化。对于殷钢和ULE 组合,去除刚体位移和离焦后,主、次镜面型RMS(root-mean-square)分别为0.01λ和0.000 7λ;对于钛合金和K9 组合,去除刚体位移和离焦后,主、次镜面型RMS 分别为0.006 5λ和0.014λ。主、次镜去除刚体位移和离焦后面型如图4 所示。相比于常温下指标,60 ℃温差下两种材料组合时系统在调焦前指标均有所下降,在调焦后指标均接近常温下指标。相面上的点列图RMS 均在衍射极限艾利斑范围内,相面波前优于(1/40)λ,MTF@63 lp/mm 均优于0.45,其相关形状和曲线如图5 所示,计算结果如表3 所示。上述指标远高于设计要求的装调指标,可以认为对系统性能的影响可以忽略,在60 ℃温差下两种材料组合均可满足使用要求。

表3 60 ℃温差下光学指标Table 3 Optical indexes at 60 ℃ temperature difference

图4 60 ℃温差下去除刚体位移和离焦后主、次镜面型Fig.4 Surface shapes of primary and secondary mirror after removing rigid body displacement and defocus at 60 ℃ temperature difference
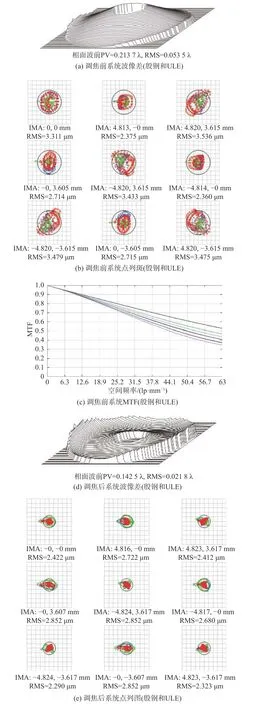
图5 60 ℃均匀温差下光学指标Fig.5 Optical indexes under uniform temperature difference of 60 ℃
3.2 10 ℃温度梯度下系统光学指标
光电系统在工作时,由于飞行高度、季节及地域的不同,所处的环境温度变化很大,同时光电系统内部存在各种局部热源,通过传导、对流和辐射与载机及周围环境进行热交换。光电系统内的温度场并不均匀,时刻处于变化中,而且光学元件的导热性通常比较差,难免形成温度梯度。光学系统在温度环境下的稳定性不仅应考虑均匀温度变化对光学系统的影响,还应考虑非均匀温度分布的影响。由于光机系统各部分之间相互约束,存在温度梯度时,将会产生应力并引起光学系统产生离焦和面型畸变等,造成成像质量下降[22-23],即使对系统进行了无热化设计和温度调焦补偿,也不能完全消除这些影响。实际的温度梯度很复杂,需要进行详细的温度场分析或实验才能确定。通常为了简化计算,进行一阶近似,将温度梯度分解为特定方向的温度梯度来考虑。对于本系统来说,热源主要集中在反射镜背面和周边,造成轴向温度梯度和径向温度梯度。根据经验,取温度梯度为10 ℃,对比不同材料对温度梯度的敏感性。10 ℃轴向温度梯度下主镜面型如图6 所示,系统光学指标变化情况如图7 所示。10 ℃径向温度梯度下主镜面型如图8 所示,系统光学指标变化情况如图9 所示。相关结果如表4 所示。通过对比可以发现,当主镜采用ULE 制作时,对温度梯度不敏感,系统光学指标几乎不变。主镜材料采用K9时,系统对温度梯度极为敏感,系统光学指标完全不能满足使用要求。造成这一结果的主要原因是K9 自身热膨胀系数远大于ULE,从而造成主镜面型变化过大。
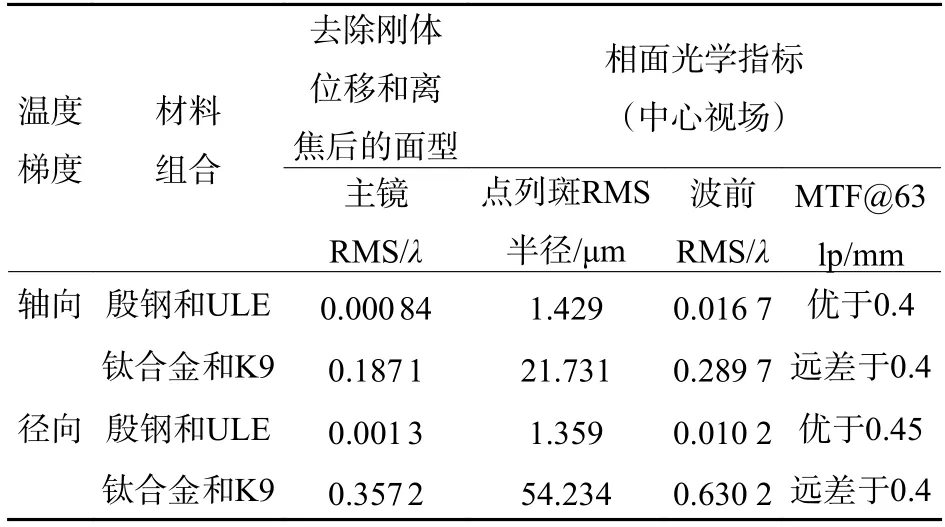
表4 10 ℃温度梯度下光学指标Table 4 Optical indexes under temperature gradient of 10 ℃

图6 主镜轴向温度梯度10 ℃时去除刚体位移和离焦后面型Fig.6 Surface shapes after removing rigid body displacement and defocus when primary mirror axial temperature gradient is 10 ℃
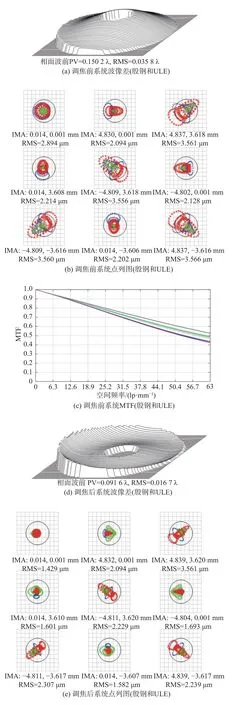
图7 10 ℃轴向温度梯度下的光学指标Fig.7 Optical indexes under axial temperature gradient of 10 ℃

图8 主镜径向温度梯度10 ℃时去除刚体位移和离焦后面型Fig.8 Surface shapes after removing rigid body displacement and defocus when primary mirror radial temperature gradient is 10 ℃

图9 10 ℃径向温度梯度下的光学指标Fig.9 Optical indexes under radial temperature gradient of 10 ℃
3.3 模态分析
对于光学系统来说,除了温度适应性外,还应有足够的刚度,可以利用光学灵敏度和模态振型组合进行振动环境下的光轴稳定精度[4,22]分析,模态和振型分析结果如表5 所示。

表5 模态和振型Table 5 Modality and vibration types
系统固有频率是刚度的直接体现,此处对系统进行模态分析,可得到前六阶固有频率,前六阶振型如图10 所示。两种材料匹配的主、次镜支撑部分一阶固有频率高达263 Hz 和245 Hz,实际系统在工作时安装在减振平台上,减振系统固有频率选择为16 Hz 左右,共光路部分固有频率远高于减振频率,光学系统具有足够的刚度。综上所述,主、次镜支撑组件的刚度满足结构要求。
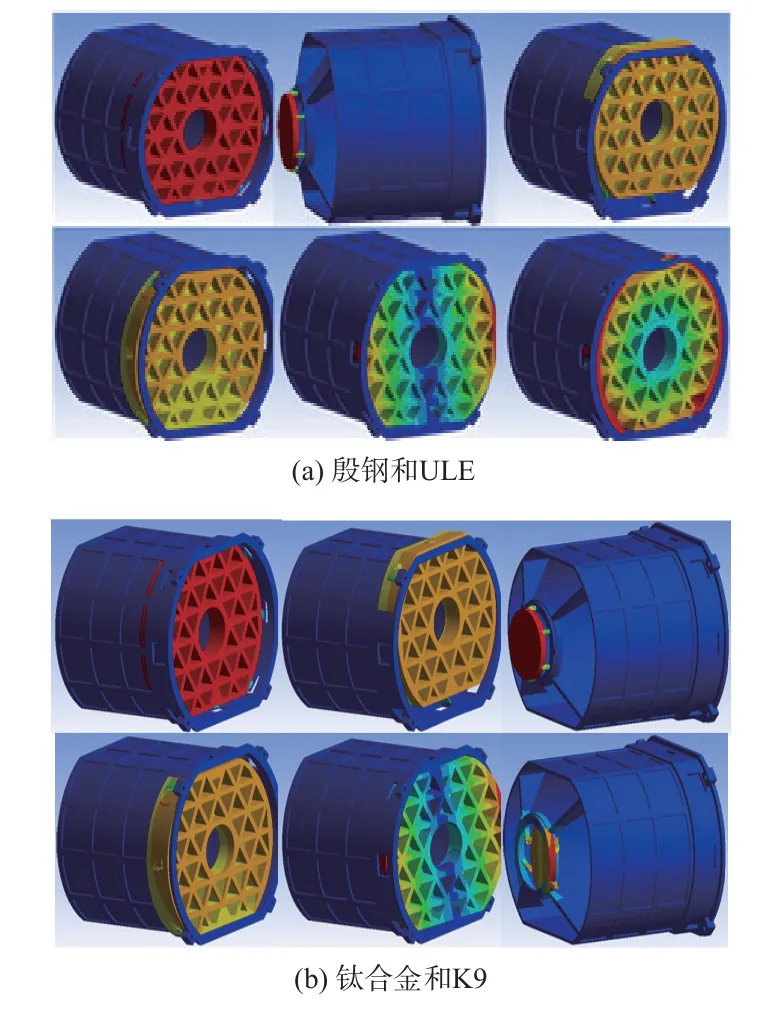
图10 前六阶振型Fig.10 The first six-order vibration types
4 结论
针对在-40 ℃~+65 ℃范围内工作的某共光路系统进行了主、次镜和支撑材料的选配、支撑柔性设计、光机一体化仿真分析。反射镜和支撑结构材料根据热膨胀系数匹配的原则可选取殷钢和ULE 组合、钛合金和K9 组合。在±60 ℃均匀温差下,殷钢和ULE 组合、钛合金和K9 组合的成像质量在调焦前均有所下降,经过调焦后成像质量均接近常温下的设计指标。采用ULE 材料的反射镜对温度梯度不敏感,采用K9 材料的反射镜则对温度梯度极为敏感。当分别存在10 ℃轴向和径向温度梯度时,ULE 主镜去除离焦后面型精度接近(1/1 000)λ,系统经过调焦后成像质量接近设计指标。K9 主镜由于自身热膨胀系数大,对温度梯度极为敏感,无法满足使用要求。对设计的柔性支撑材料进行了刚度分析,一阶固有频率高达263 Hz,说明设计的柔性支撑材料在保证温度适应性的同时具有足够的刚度。
本文没有给出共光路系统在各种姿态下受重力等影响时面型变化的计算结果。对于中小型共光路系统来说,主镜的相对刚度很高,重力的影响通常可以忽略,但当主镜轻量化率比较高时,则需要仔细校对。
根据本文设计的光机系统已完成了部分验证试验,在低温时,用分辨率靶进行检测,分辨率无明显下降,说明设计和仿真结果可行,开发的光机仿真程序能够满足工程使用要求。
猜你喜欢
航天制造技术(2022年4期)2022-09-30
交通科技与管理(2022年18期)2022-09-18
花火·绘阅读(2021年2期)2021-09-10
雪豆月读·高年级(2020年7期)2020-09-10
山西建筑(2019年21期)2019-12-02
电子制作(2018年23期)2018-12-26
儿童时代·快乐苗苗(2018年6期)2018-09-03
中国光学(2017年4期)2017-08-01
光学精密工程(2016年11期)2016-12-19
铁道建筑(2015年3期)2015-12-26
