
基于金枪鱼群优化算法的光伏MPPT控制策略研究
2023-10-05 05:16孙淑琴李再华
电源技术 2023年9期
孙淑琴,李 丞,李再华,祁 鑫
(1.吉林大学仪器科学与电气工程学院地球信息探测仪器教育部重点实验室,吉林长春 130026;2.中国电力科学研究院,北京 100192)
世界能源需求日益增加,太阳能是丰富的清洁的可再生能源。由于光伏阵列非线性输出特性受光照强度、工作环境温度等因素影响,如何提高太阳能能量转换率是光伏发电技术领域的热门问题,对实现我国“双碳”目标具有重要意义[1]。
研究人员希望通过研究最大功率点跟踪(maximum power point tracking,MPPT)[2]控制方法来跟踪最大功率点,从而实现对太阳能的最大效率转化。在局部阴影情况下阵列输出P-U 呈现多个功率峰值[3],传统的MPPT 算法如电导增量法(incremental conductance,INC)、扰动观测法(perturb and observe,P&O)[4-5]等可能无法跟踪到全局最大功率点,导致发电效率降低。为解决此问题,国内外众多学者提出基于群体行为的智能MPPT 算法。文献[6]提出的基于灰狼优化算法(grey wolf optimization,GWO)MPPT 控制策略能够解决跟踪全局最大功率点问题,但动态阴影后跟踪精度稍有不足,在复杂环境变化光照时可能导致跟踪失效;文献[7]提出的改进蝴蝶优化算法(improved butterfly optimization algorithm,IBOA)MPPT 控制策略虽然其振荡过程幅度较小,但收敛时间略久且跟踪精度不佳。
本文针对上述问题,提出了一种基于金枪鱼群优化算法(tuna swarm optimization,TSO)[8]的光伏MPPT 控制方法,用于跟踪局部阴影情况下最大功率。以金枪鱼群的协同觅食行为为原理,构建螺旋觅食和抛物线觅食两种策略的数学迭代模型,寻找最优个体(食物)即最大功率点。通过MATLAB/Simulink 仿真验证,结果表明该算法相比灰狼优化算法、蝴蝶优化算法具有更快的收敛速度和更好的精度,在局部阴影情况下可更快更准地跟踪到最大功率点,对光强突变有更好的动态响应能力。
1 光伏阵列建模及仿真
1.1 光伏电池数学模型
单块太阳电池板的等效电路如图1 所示。

图1 光伏电池等效电路
根据图1 可得单块电池电流输出特性[9]为:
式中:I、Iph、ID0分别为光伏电池工作电流、光生电流和二极管反向饱和电流;e 为自然常数;q、N、K、T分别为电子电荷量、二极管品质因数、玻尔兹曼常数、电池工作温度;Rs、Rsh分别为光伏电池串联电阻和并联电阻;V为电池输出电压。
工程上可将式(1)简化为式(2):
式中:Isc、Im分别为电池短路电流和最大功率点电流;Vm、Voc分别为电池最大功率点电压和开路电压;A1、A2为电池结构系数。
当太阳辐射强度和电池环境温度变化时需要重新计算开路电压和短路电流,重新计算A1和A2。当考虑环境温度和光强变化时,得到公式(3):
式中:S为变化后光强;Sref为参考辐射光强,1 kW/m2;T为变化后环境温度,Tref为参考环境温度25 ℃;Iscnew、Imnew分别为变化后电池短路电流和最大功率点电流;Vmnew、Vocnew分别为变化后电池最大功率点电压和开路电压;a、b、c分别为电流对温度的补偿系数、电压对光强的补偿系数以及电压对温度的补偿系数,分别取典型值a=0.002 5、b=0.5、c=0.002 88。
1.2 光伏阵列输出特性
多个光伏电池板串联或并联组成光伏阵列,本文以[1×3]光伏阵列为研究对象。由于局部遮挡可能产生热斑效应,导致光伏电池烧毁,故在电池模块两端并联二极管,抑制热斑效应的生成,降低光伏列阵输出功率衰减。光伏阵列建模如图2 所示。
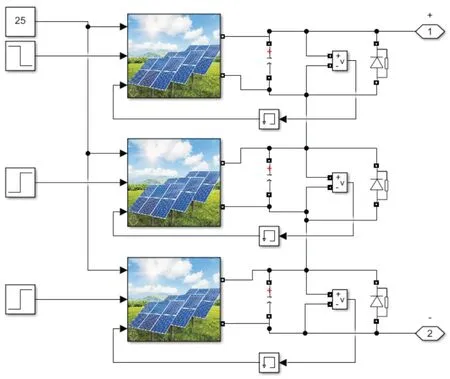
图2 [1×3]光伏阵列仿真模型
其参数设置为:开路电压Voc=36.84 V,短路电流Isc=8.32 A,最大功率点电压Vm=30.72 V,最大功率点电流Im=7.83 A。标准环境温度为25 ℃,分别对表1 中三种不同光照强度进行MATLAB/Simulink 仿真验证。光伏阵列输出特性曲线如图3所示。由图3(a)可看出在局部遮荫工况1(1 000、400 和800 W/m2)情况下输出功率特性曲线有三个峰值,工况2(800、800和1 000 W/m2)情况下输出功率特性曲线有两个峰值。
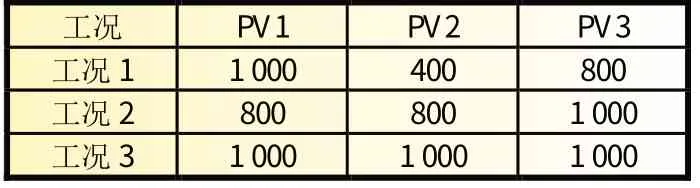
表1 不同工况下光照强度 W/m2
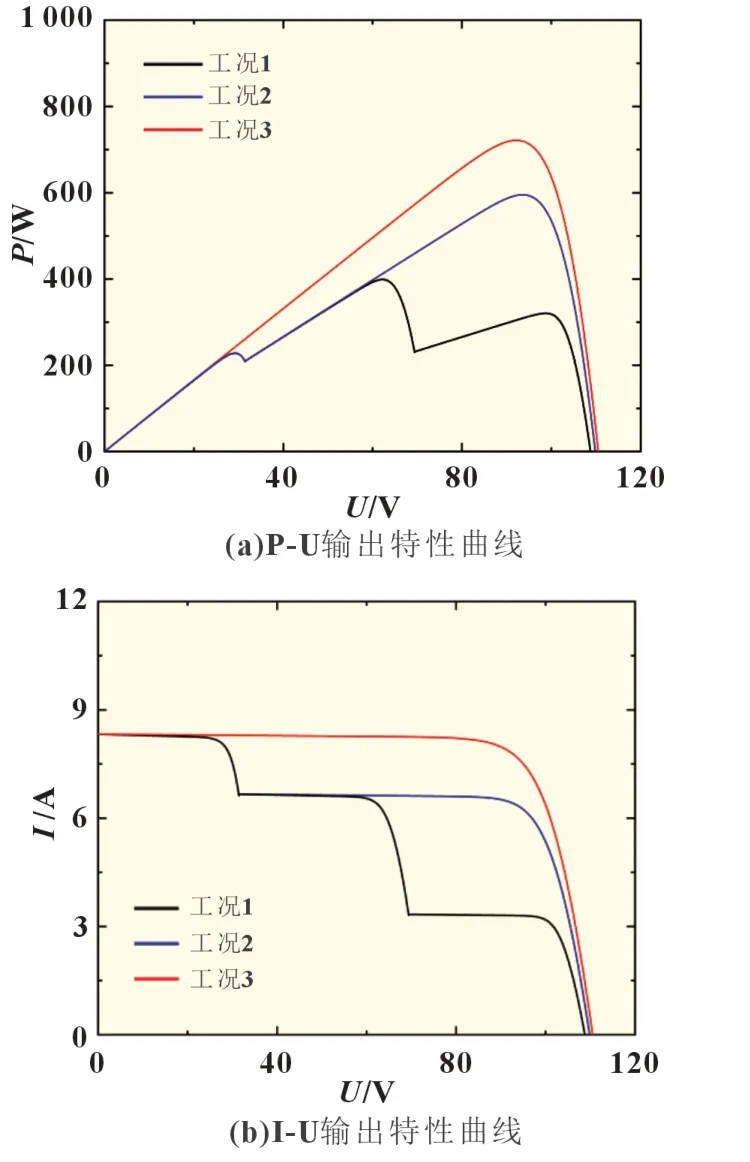
图3 不同工况下光伏电池输出特性
2 基于TSO 算法的MPPT 控制策略
2.1 金枪鱼群优化算法原理
金枪鱼群优化算法是我国学者谢磊于2021 年提出的一种基于种群的全局优化元启发式算法。TSO 算法模拟了金枪鱼群的两种觅食策略,觅食(寻优)过程可描述如下:第一种策略是螺旋觅食,当金枪鱼群觅食时,它们以螺旋形式游动将猎物赶到浅水捕食;第二种策略是抛物线觅食,每条金枪鱼都在前一条鱼尾后游动,形成一个抛物线形状来包围猎物。通过两种觅食策略实现全局寻优。
2.1.1 螺旋觅食
当小型鱼群遭遇捕食者时会不断变向使捕食者难以锁定,此时金枪鱼群通过形成紧密的螺旋形捕食。虽然大多数鱼没有方向感,但是每条鱼跟在前一条鱼后,相邻的鱼可以交换信息。当一小群鱼一直朝一个方向游动,周围的鱼会调整方向,最终形成目标一致的群体开始捕猎。螺旋觅食策略的数学公式如式(4)~式(8):
当最优个体找不到食物(全局最优)时,盲目地跟随最优个体不利于群体觅食,因此在搜索空间生成随机坐标作为螺旋觅食的参考点,有利于跳出局部最优,使算法具有全局寻优能力。如式(9)所示:
随着迭代次数的增加,金枪鱼优化算法应从全局搜索逐步过渡到精确局部挖掘。因此,随着迭代次数的增加,上述金枪鱼群在螺旋觅食的参考点由随机个体变为最优个体。综上所述,最终螺旋觅食策略数学模型如式(10):
2.1.2 抛物线觅食
金枪鱼除了以螺旋结构觅食外还会形成抛物线形状捕猎,金枪鱼以食物为参考点形成抛物线型觅食,具体数学模型如式(11):
式中:TF为随机数,取值1 或-1。
综上所述,金枪鱼觅食数学模型数学表达式可总结为式(12):
2.1.3 捕食
金枪鱼群通过两种觅食方式靠近猎物,每种方式各50%的概率,通过迭代过程不断更新最优个体位置,不断靠近食物,最终捕获食物。
2.2 TSO 算法的最大功率跟踪
初始金枪鱼群位置可随机生成,或按需求放置,初始种群位置和迭代次数有一定关系,选择恰当可减少迭代次数,从而减少收敛时间。由恒电压法可知最大功率点对应电压一般为开路电压的0.8 倍,但在局部阴影情况下并非如此,故初始种群应均匀分布在搜索空间内以确保丰富度。
对于光伏最大功率跟踪来说,目标函数是光伏阵列实时输出,如式(13):
目标函数功率的值对应着金枪鱼群中最优个体以及食物的位置(占空比),目标函数功率取最大值即找到食物(最优占空比)。
设置初始种群后计算当前种群位置即计算占空比所对应个功率,选出最优个体。种群各有50%的概率按照螺旋觅食和抛物线觅食数学公式进行觅食即迭代,在螺旋觅食过程中,会产生随机数与t/tmax比较,使得种群不断向最优个体收敛,向最大功率点处聚集。
本文TSO 算法的终止条件是当迭代到设定最大迭代次数时,输出迭代过程中的最优个体位置即最优占空比,迭代结束;若没达到最大迭代次数则返回迭代过程继续迭代。
由于自然环境中阴影并非一成不变,故针对当阴影变化后TSO 算法仍能跟踪变化后最大功率点,设定重启条件如式(14)所示,使系统可重启。
式中:Pnow为当前检测到光伏阵列的输出功率;Pold为上一次迭代中最大功率;Δtv为预先设定的阈值。
金枪鱼群优化算法流程如图4 所示。
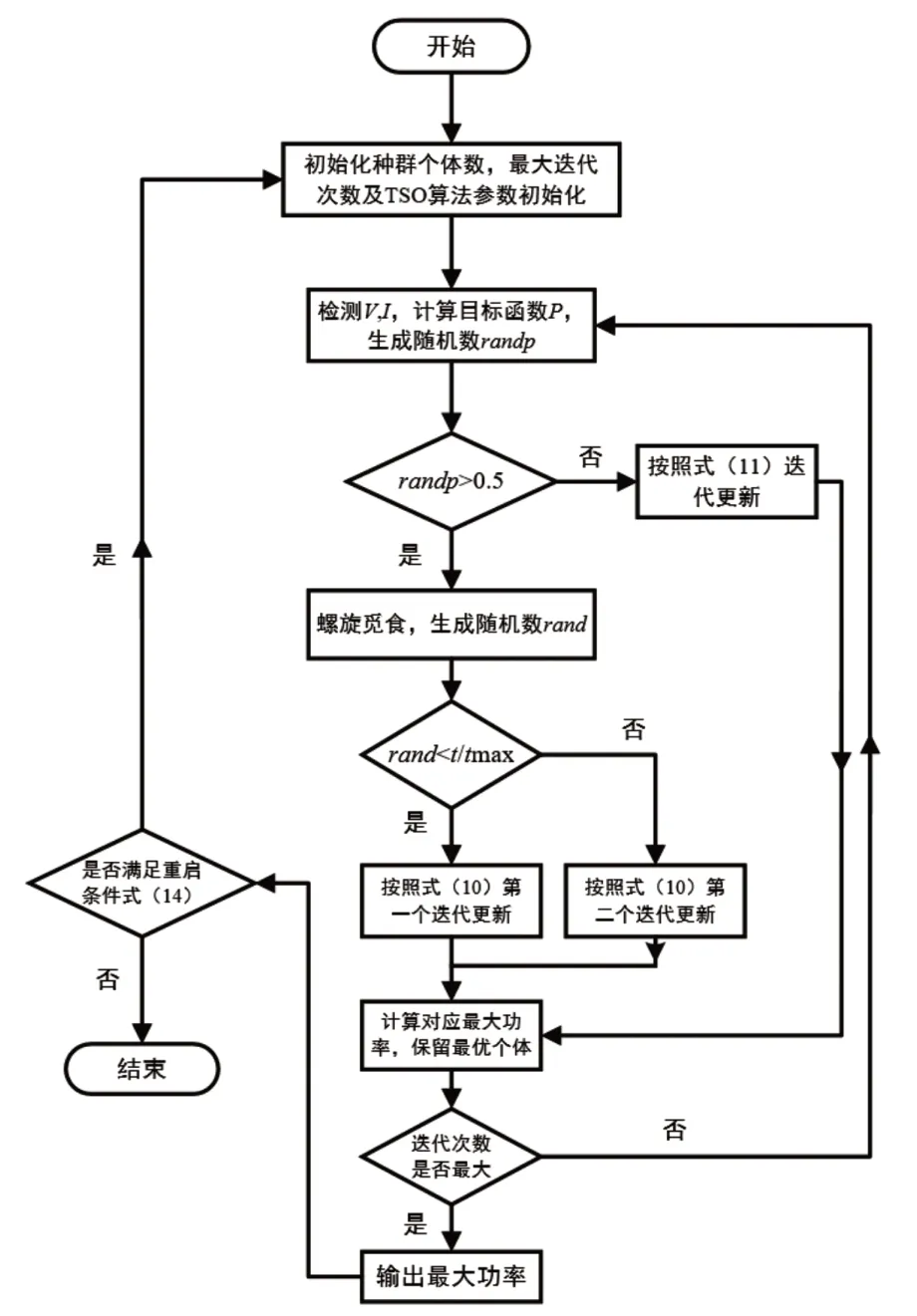
图4 TSO算法流程
3 不同控制策略下的仿真与结果分析
3.1 搭建仿真模型
为验证上述基于TSO 的MPPT 控制算法对最大功率点的跟踪性能和效率,在MATLAB/Simulink 平台搭建仿真模型,如图5 所示。模型组成为光伏阵列,Boost 电路接阻性负载以及TSO 算法模块。该模块输入为光伏列阵输出电流电压,输出为占空比,当追踪至最大功率点后,输出占空比稳定在恒定值,随后经PWM 信号发生器给到IGBT 完成控制。光伏阵列仿真参数如1.2 节中设置,Boost 电路仿真参数为:C1=500 μF,L=7 mH,C2=10 μF,负载R=20 Ω,开关频率为20 kHz。TSO 算法参数设置为:两种觅食切换概率randp=0.5,最大迭代次数tmax=13,重启阈值Δtv=0.05,初始种群数10 个。

图5 基于TSO的MPPT仿真模型
3.2 静态阴影情况下仿真分析
为验证基于TSO 算法在静态阴影条件下对MPPT 多峰值跟踪效果,对工况1,标准温度25 ℃,三块光伏电池板光强分别为1 000、400、800 W/m2进行静态效果跟踪实验。使用GWO、IBOA 算法进行相同工况静态局部阴影下对比实验。仿真时长为2 s,仿真结果如图6 所示,不同算法静态阴影性能比较如表2 所示。

表2 不同算法静态阴影性能比较

图6 静态阴影下功率追踪效果
工况1 所对应的最大功率值为398.9 W。由图6 和表2 可知,三种智能算法都能跟踪到局部阴影条件下多峰值的最大功率点,IBOA 跟踪到的最大功率值为398.8 W,精度达到99.97%,收敛时间与本文提出的TSO 算法相比略久,多用时0.05 s,振荡情况较小;GWO 跟踪到的最大功率值为398.7 W,精度可达99.94%,与TSO 相比略低,收敛时间在三种智能算法中最久,且搜索寻优过程中振荡最大;TSO 收敛速度是三种智能算法中最快的,仅用时0.27 s,其跟踪到的最大功率值为398.8 W,精度高达99.97%,振荡幅度也很小,该算法可以在局部遮荫条件下快速响应并跟踪至全局最大功率点,有效提高光伏发电系统对太阳能的利用率,证实了算法的有效性。
3.3 动态阴影情况下仿真分析
在自然条件下,光伏电池板易受云层变化、灰尘、生物等复杂环境影响,此时光伏电池所受光照强度会发生变化,因此进行动态阴影仿真实验来模拟真实环境中的光强变化,检验提出算法在光强突变情况下的跟踪能力和动态特性。仿真实验设置为在1.2 s 由工况1 光强(1 000、400、800 W/m2)突变至工况2 光强(800、800、1 000 W/m2)。同样使用智能算法GWO、IBOA 做对比实验,仿真时长共2.4 s,仿真结果如图7所示,不同算法动态阴影性能对比如表3 所示。

表3 不同算法动态阴影性能对比
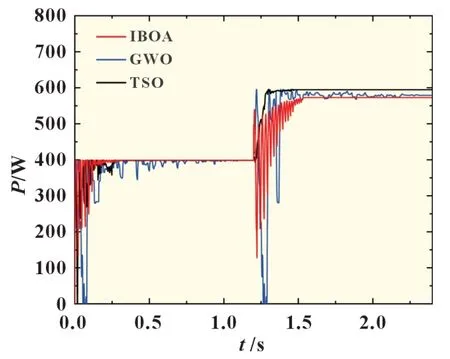
图7 动态阴影下功率追踪效果
工况2 所对应的最大功率值为595.2 W。由图7 和表3 可知,在1.2 s 时光照突变,功率也随之变化。IBOA 在光强突变后跟踪到的最大功率值为572.9 W,精度仅有96.25%,振荡幅度较小,收敛时长为0.35 s,虽然收敛但跟踪精度不佳;GWO 在光强突变后跟踪到的最大功率值为579 W,精度有97.28%,优于IBOA,但收敛时间依然较长,用时1.13 s,跟踪精度有待提高;本文提出的TSO 算法在阴影变化前后都保持较高跟踪精度,光强突变后跟踪到的最大功率值为594.6 W,精度高达99.90%,收敛时长仅用0.28 s,仅有轻微振荡,能快速跟踪到新的最大功率点。
4 结论
本文提出基于金枪鱼群优化算法的MPPT 控制算法,对光伏电池在变光照强度和环境温度情况下建立了数学模型,将金枪鱼优化算法融合到最大功率跟踪控制中进行迭代寻优,给出了基于TSO 的MPPT 算法原理,在MATLAB/Simulink 中进行静态阴影和动态变化阴影的仿真实验。实验结果表明TSO 算法在上述两种情况下都可以快速准确地跟踪到最大功率点并保持稳定,且在动态阴影工况下相比于IBOA和GWO 的MPPT 控制方法,其跟踪精度更高、收敛速度更快、振荡幅度更小,为光伏最大功率点跟踪技术对日照条件的适应性提供了新的解决方案。
猜你喜欢
趣味(数学)(2022年3期)2022-06-02
军事文摘(2021年22期)2022-01-18
阅读与作文(小学高年级版)(2021年8期)2021-09-12
文苑(2020年11期)2020-11-19
中国诗歌(2019年6期)2019-11-15
商周刊(2018年19期)2018-12-06
红领巾·探索(2018年10期)2018-11-14
中学生数理化·八年级物理人教版(2017年11期)2017-04-18
娃娃乐园·综合智能(2016年15期)2016-12-01
数学大王·中高年级(2016年4期)2016-05-14
