
超高速公路虚拟轨道模型的构建与验证研究
2023-10-08 12:44何永明陈世升
重庆交通大学学报(自然科学版) 2023年8期
何永明,冯 佳,权 聪,曹 剑,3,陈世升
(1.东北林业大学 土木与交通学院,黑龙江 哈尔滨 150040;2.东北林业大学 交通研究中心,黑龙江 哈尔滨 150040;3.比亚迪股份有限公司 汽车工程研究院,广东 深圳 518118))
0 引 言
研究团队自2016年提出超高速公路概念以来,对其经济性、安全性等进行了深入研究,结果表明安全性是发展超高速公路的最大障碍。我国设计车速超过120 km/h高速公路相关研究还处于起步阶段,对设计车速超过120 km/h的“超高速公路”安全性的研究需求非常迫切。2018年,我国首条设计速度为150 km/h的“杭绍甬”超高速公路开工建设,预计于2023年底通车。2019年3月,设置自动驾驶专用车道的“京雄”高速公路也获得立项,超高速公路的发展速度远远超过预期。
虚拟轨道技术将车辆限制在由“车”和“路”联动控制的虚拟轨道安全范围内行驶。经过研究团队的论证,超三级高速公路主要服务于自动驾驶车辆,随着自动驾驶和智慧交通时代的来临,车辆智能化和网联化的推进对现有的交通基础设施、车辆组织管控、车路协同水平和行驶安全保障提出了更高的要求和挑战。笔者建立了数学模型,当超高速公路车辆将要驶离虚拟轨道安全范围时,车辆及驾驶员可以得到反馈,以保证车辆不脱离虚拟轨道安全阈值范围。研究结果表明:笔者提出的超高速公路虚拟轨道系统可将车辆限制在虚拟轨道安全范围内行驶,保证超高速公路行车的安全性。因此提出超高速公路虚拟轨道模型研究问题有着重要的理论价值和现实意义。
1 相关研究概述
1.1 超高速公路
研究团队在对公路施工技术、汽车新技术和国外高速公路成功运营经验进行分析的基础上,经过多轮专家论证,根据设计速度将超高速公路划分为3个等级。超高速公路等级划分如表1。

表1 超高速公路等级划分
2020年,研究团队考虑“人”、“车”和“路”特性,研究了不同等级超高速公路纵断面设计参数[1]。2021年,团队通过研究得到影响汽车燃油消耗的16个影响因素,其中行驶速度是最关键因素[2]。
在研究团队的影响下,国内一批学者也陆续加入了超高速公路的研究。刘展行[3]通过对现有高速公路系统存在的问题进行分析,对未来超级高速公路的发展提出了大胆的设想;赵酉超等[4]研究了超高速公路的理论通行能力和汽车运行经济性,并对超高速公路的部分线形指标进行了研究,结果显示超高速公路的建设和运营具有可行性;陈芬菲等[5]针对超高速公路在施工建设期及运营管理期间的特征优势与劣势、外部环境的机遇与威胁,通过运用SWOT分析法,为超高速公路未来发展提供建议。
综上所述,发展设计车速超过120 km/h的超高速公路已经成为了一个迫在眉睫的问题,如何解决超高速公路运营过程中的安全问题也就显得尤为重要。
1.2 虚拟轨道
虚拟轨道通过道路基础设施为自动驾驶车辆提供数据信息,使自动驾驶车辆能更好地与其他车辆和道路环境形成协同,以提高自动驾驶车辆的运行安全性。现有关于虚拟轨道的研究大多针对城市交通,用来解决目前城市交通发展的滞后性及“人”、“车”、“路”三者不协调,造成的交通环境恶化,交通结构低效等问题。
2017年6月,全球首列虚拟轨道列车在湖南株洲亮相。2019年12月,全球首条商业化运营的超级虚拟轨道快运线在四川宜宾开通,国内如哈尔滨、江西永修等城市已开展试运营[6]。徐伟[7]研究盐城发展超级虚拟轨道的可行性,为盐城实现城市公共交通系统升级提供新的选择;侯凯文[8]在充分借鉴铁路列车运行控制思想的基础上提出了虚拟轨道理论,为道路交通场景下规模化自动驾驶车辆的管控创造条件;丁铁成等[9]以虚拟轨道列车为研究对象,建立了舒适性评价体系,为虚拟轨道列车进一步设计开发提供理论参考;花明磊[10]研究了虚拟轨道车辆的广义综合舒适度,建立了综合舒适度评价装置;柳慧鹏等[11]借助最新的智能交通中车辆网中V2X和5G通信技术和其他传感技术,提出融合感知的智能虚拟轨道交通系统框架,为开发智慧虚拟轨道交通系统提供参考;曾厚铭等[12]使用ADAMS软件建立了三节编组的虚拟轨道列车虚拟样机模型,通过仿真结果表明,建立的模型明显改善了循迹效果;韩鹏[13]研究了一种新型城市轨道交通车辆—基于虚拟轨道的自导向有轨电车。该车辆集美观、智能和节能环保于一体;孙帮成[14]建立了虚拟轨道列车运动学模型,提出各车间模块低速运动时的独立循迹控制方法;Y.M.HE等[15]研究了基于智能路钮的超高速公路虚拟轨道系统,结果表明当超高速公路设计车速为140、160、180 km/h,路钮间距离小于1.33、1.50、1.69 m时,可以保证超高速公路行驶安全性;C.P.WANG等[16]基于车辆动力学、轮胎动力学和非线性动力学理论,建立了包含3辆车辆的虚拟轨道列车的三维动力学模型,利用实际虚拟轨道列车的现场动态加速度试验对所建立的动力学模型进行了验证;D.H.ZHANG等[17]提出了一种新的跟踪控制方法,在ADAMS中构建了分布式驱动主动转向铰接式虚拟轨道列车仿真模型,通过仿真结果表明所提方法在各种轨道、不同速度下具有良好的跟踪控制精度、适应性和优越性;P.HAN等[18]提出了一种基于虚拟轨道的新型道路车辆的构想,该车具有速度适宜、容量大、造价低、环保等一系列优点;Z.H.YIN等[19]建立了具有路径跟踪性能的车辆和VTT的仿真框架,该仿真框架可进一步应用于动力学相关评估、参数优化和主动悬架控制策略等方面;CUI Hongming等[20]为提高混合动力虚拟轨道列车能量回收效率,提出一种已知线路信息条件下基于工况分割策略的能量管理方法。
2 虚拟轨道系统结构组成
2.1 虚拟轨道系统总体结构
分析超高速公路虚拟轨道模型时,选取车辆质点正下方的信号器作为分析对象,将车辆看做质点进行研究分析。超高速公路虚拟轨道系统由信息采集子系统、信息处理子系统和信息反馈子系统组成。信息采集子系统通过对车辆进行高精度定位,获取得到前方路段的道路线形信息、车辆和道路之间的信息(速度和距离),并将采集到的信息传递给信息处理子系统;信息处理子系统主要对传输进来的信息进行分析判断,将分析结果传递到信息反馈子系统;信息反馈子系统输送信号至车辆信号器,给予车辆反馈以及相应的警告信号,保证车辆行驶在虚拟轨道安全范围内,提高超高速公路行车的安全性。虚拟轨道系统拟采用5G技术,实现信息高速实时传递。虚拟轨道系统的总体工作结构如图1和图2。

图1 虚拟轨道系统结构
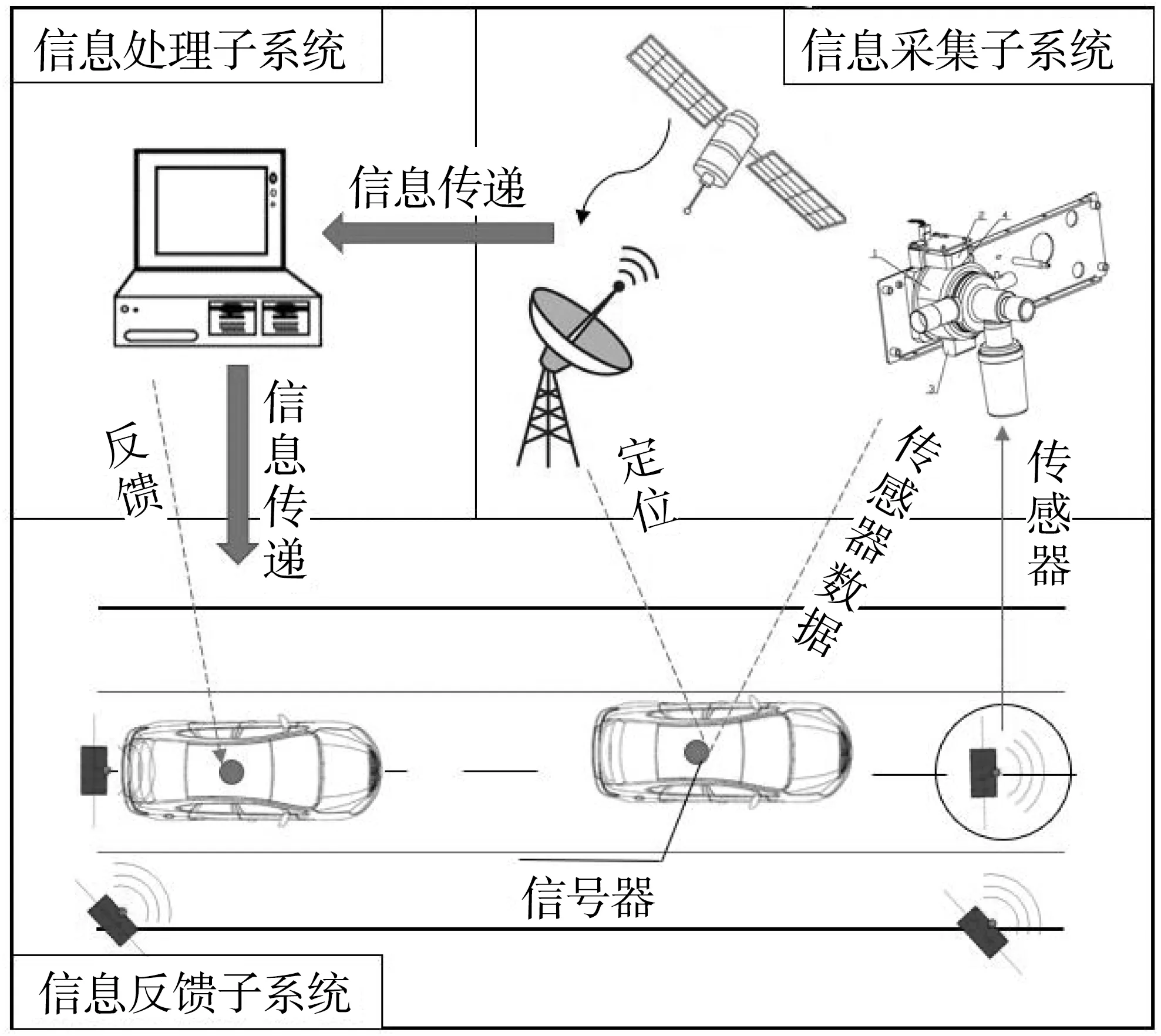
图2 虚拟轨道系统组成
2.2 信息采集子系统
信息采集子系统具有道路线形和传感器信息的采集和导入功能。信息采集子系统由GPS定位装置和道路传感器组成。GPS定位系统由空间部分(导航卫星)、地面控制系统(主控站、监测站、地面天线)和用户设备部分(接收机)组成[21],在虚拟轨道系统中,用车载型接收机,即车辆作为接收机(图3)。道路传感器分别设置在车道中心线和道路路肩。通过对车辆进行高精度定位,识别前方道路线形信息;通过测速装置采集车辆实时速度信息;将高速行驶的车辆看做质点进行理论分析,在直线路段上,路侧传感器检测到与车辆信号器之间的距离,将采集到的距离信息输入到信息采集子系统;在曲线路段上,将路侧传感器检测到的实时速度信息和圆曲线半径信息输入到信息采集子系统。
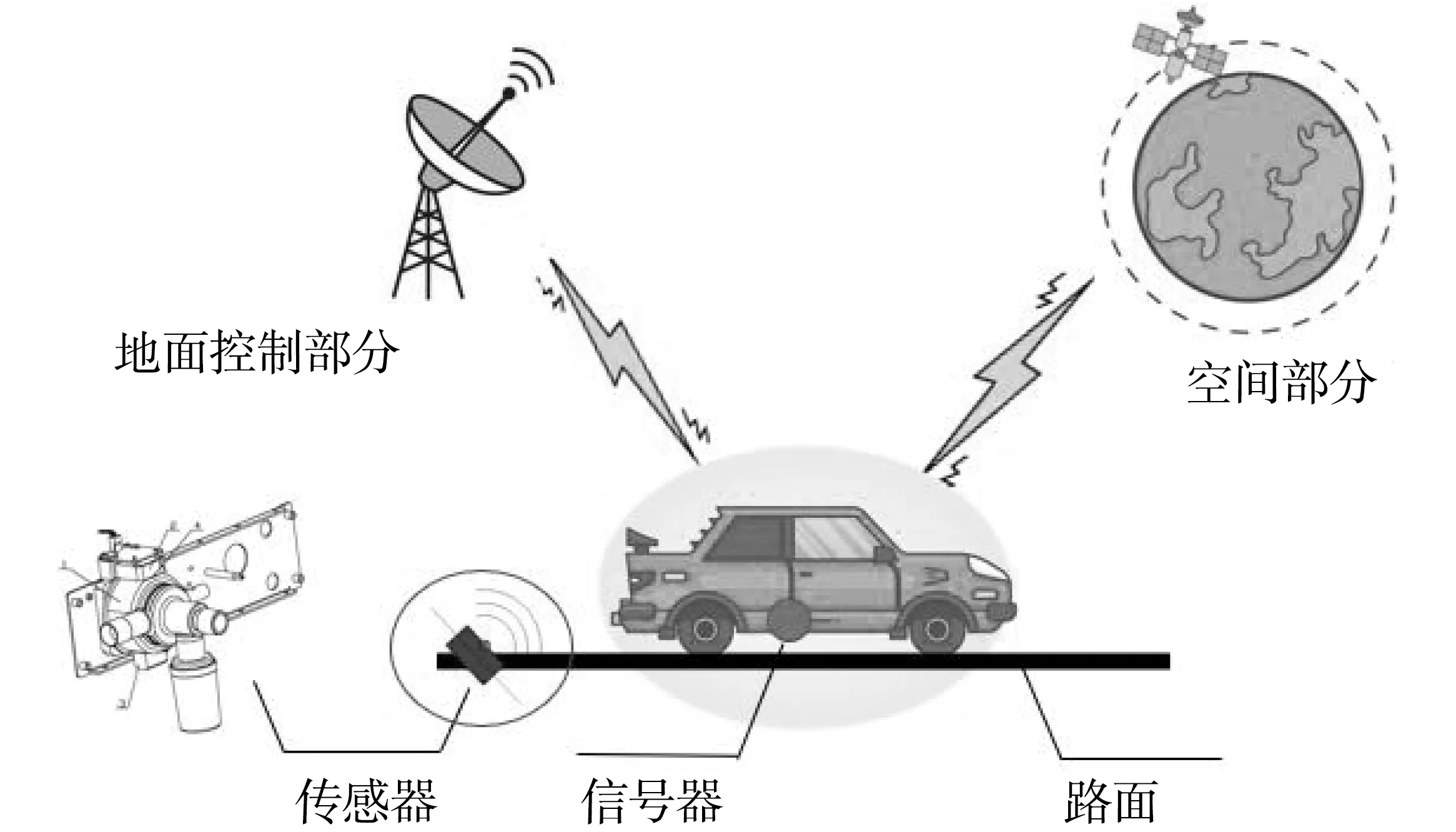
图3 信息采集子系统
2.3 信息处理子系统
信息处理子系统具有信息采集子系统信息导入和预警信息输出的功能。通过道路线形信息及路侧测速装置得到的速度信息,对车辆理想行驶轨迹进行预估计。将信息处理结果输入到信息反馈子系统,通过对车辆实际的行驶路线和系统预估计的行驶路线进行对比,进行分析判断,给予行驶在虚拟轨道上的车辆反馈,提供预警信号,及时做出调整,以提高超高速公路车辆行车的安全性。
2.4 信息反馈子系统
信息反馈子系统的功能是使车辆接收到虚拟轨道系统给予的预警信号,即得到信息处理子系统的反馈,继而对车辆采取相应的措施,使得车辆行驶保持在虚拟轨道安全范围之内。安装在车辆上的信号器可以接受信号处理子系统的信号(图4),通过判断给予车辆反馈。

图4 道路传感器与车载信号器
3 虚拟轨道模型建立
3.1 直线路段模型建立
假设车辆以速度v匀速行驶在直线路段上,为保证车辆不会偏离预设的轨道,在距道路中心线a处,设置距离传感器,能够检测到传感器本身与汽车质心之间的距离(图5)。假设虚拟轨道宽度为2l,为保证车辆行驶在虚拟轨道内,以汽车质心作为原点,建立直角坐标系,以汽车行驶方向为y轴,其切线方向为x轴。当汽车经过时间t行驶到A点,即汽车即将驶出虚拟轨道边界,车辆距道路中心线lm。此时,为了给予车辆反馈,需要虚拟轨道系统给车辆下达转向命令。

图5 直线路段偏离
当车辆行驶在超高速公路上在以速度v=100、180 km/h匀速行驶时,每秒的路程分别为27.8、50.0 m,一般单车道宽度为3.75 m,故车道中心线安全距离相对于超高速公路上汽车每秒行驶路程很小,如图5,在车辆超出安全距离之前所行驶的横向距离可忽略不计,即车辆实际行驶的距离OA与车辆不发生偏离时行驶距离OA′近似相等,即OA≈OA′,以半径r=OA,以O点为圆心画圆(图5),汽车实际位置与理想位置都在圆上。
在车辆到达汽车不发生偏离轨道的情况下,车辆理想位置如图5中A′点所在位置,汽车经过时间t,汽车实际行驶至A点所在位置。此时,传感器检测到与汽车质心之间的实际距离为:
Sr2=(vt)2-l2+(a-l)2
(1)
传感器与汽车质心之间的理想距离为:
Si2=(vt)2+a2
(2)
式中:Sr为传感器检测到与汽车之间的距离;Si为汽车与传感器理想距离;v为汽车行驶速度;t为汽车即将超出安全中心线行驶的时间;l为汽车驶出虚拟轨道道路中心线的最大距离;a为传感器距道路中心线的垂直距离。
以汽车右偏为例进行分析,理论距离的平方与实际距离的平方差ΔS为:
ΔS=2al
(3)
同理得汽车向左偏离道路中心线时ΔS为:
ΔS=-2al
(4)
故当系统检测到ΔS≤-2al或ΔS>2al时,汽车需要采取相应的措施进行调整。为使车辆行驶在虚拟轨道安全范围内,当ΔS≤-2al时,汽车向左偏离虚拟轨道道路中心线,此时汽车应执行向右转向的命令;当ΔS>2al时,汽车向右偏离虚拟轨道道路中心线,此时汽车应执行向左转向的命令。
3.2 曲线路段模型建立
3.2.1 偏离虚拟轨道时间模型建立
为保证车辆转弯时不发生侧滑或侧翻,可得前轮最大偏转角,见式(5),行驶速度越大,前轮最大偏转角越小,由于超高速公路设计速度大,故车辆转弯时前轮最大偏转角很小。
(5)
式中:φh为横向摩擦因数;ih为道路超高;β为前轮最大偏转角;L为轴距。
故在研究曲线路段车辆偏离虚拟轨道时,假设汽车以角度θ1向曲线外侧驶离虚拟轨道道路中心线。汽车转弯行驶时,车身与曲线半径垂直,前轮相对车身转角为θ1,当前轮与曲线半径相切时,即此刻车辆沿着速度方向行驶,车轮转角为θ(θ>θ1),当前轮转角大于θ时,即车辆向右转弯。故研究车辆转弯时,车辆沿着与曲线半径相切方向偏离虚拟轨道。汽车行驶在曲线路段上时,在任一时刻,汽车车身与这一瞬时状态所处的圆曲线相切,故选取某一时刻进行分析,以车身方向,即汽车速度方向为y轴,相对应过圆心的切线方向为x轴,建立直角坐标系。以Q点为圆心,以此刻曲线半径r画圆,同时,以半径r+l画圆(图6)。
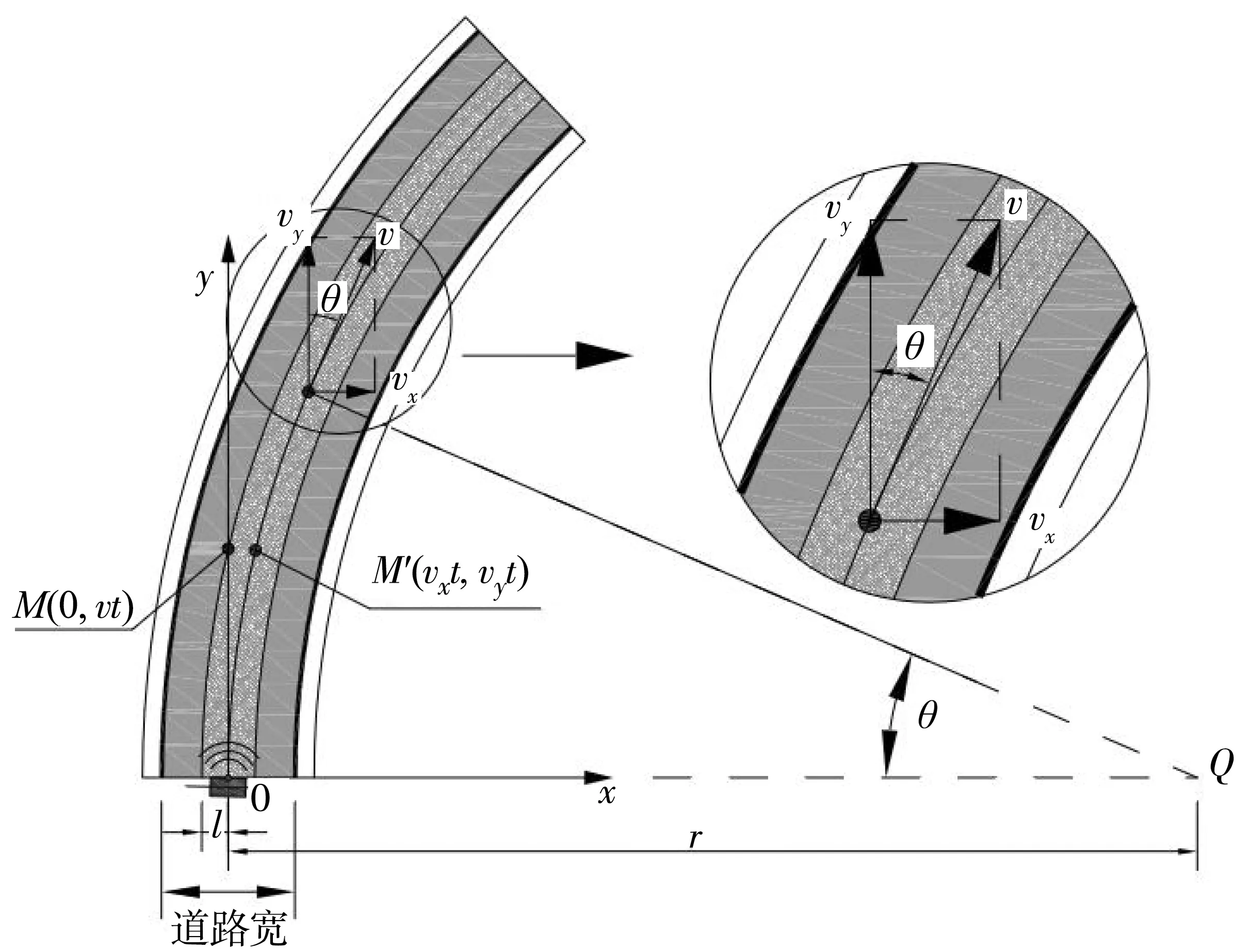
图6 曲线路段偏离
道路中心线模型为:
(x-r)2+y2=r2
(6)
虚拟轨道安全范围模型为:
(x-r)2+y2=(r±l)2
(7)
以汽车偏离虚拟轨道外侧为例进行分析,故左偏时虚拟轨道安全范围模型为:
(x-r)2+y2=(r+l)2
(8)
假设在某一时刻汽车沿着y轴方向行驶,即沿着车身方向行驶,汽车行驶时间t后,汽车行驶到M点,即偏离虚拟轨道中心线l时,x=0,y=vt,带入式(8)中得t为:
(9)
式(9)为偏离虚拟轨道的时间计算模型,汽车以θ角向曲线外侧驶离虚拟轨道道路中心线,故汽车以y轴方向驶出虚拟轨道安全范围需要时间t,与道路曲线半径、汽车行驶速度及汽车驶出虚拟轨道道路中心线的最大距离有关。道路传感器可按此时间间隔进行布设。
3.2.2 偏离虚拟轨道预警距离模型建立
由图6,将汽车此刻速度沿x轴和y轴分解为vx和vy,经过时间t后,汽车的实际位置坐标为M(0,vt),汽车的理论坐标为M′(vxt,vyt)。则两点之间的距离Δd为:
(10)
将式(9)带入式(10)得:
(11)
由图6分析可得:
(12)
因为:
vx2+vy2=v2
(13)
联合式(12)和式(13)可得:
(14)

(r+a2)x2-2r2x+r2-a2=0
(15)
得式(15)二次方程的2个根为:
(16)
当x1=1时,vy=y,此时汽车行驶在直线路段上,故舍去x1。将x2带入式(11)中得:
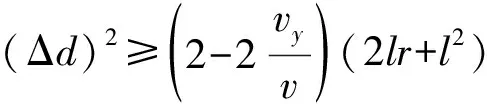
(Δd)2=(2-2x)(2lr+l2)
(17)
即:
(18)
式(18)为偏离虚拟轨道预警距离模型,当车辆经过时间t后实际位置与理论位置之间的间距大于Δd时,汽车将驶离虚拟轨道安全范围。以此作为界限,保证汽车行驶在虚拟轨道安全范围内。
超高速公路可以服务于无人驾驶汽车,汽车高速行驶在曲线路段的过程中,即使汽车会偏离原定道路中心线,也是以一个较小的角度偏离虚拟轨道,甚至驾驶员很难发现车辆正在偏离虚拟轨道道路中心线。
如图7,若车辆不以垂直于曲线半径方向发生偏离,以更小的角度(θ1)偏离虚拟轨道中心线,在经过时间t后,从O点行驶到N点,而不以垂直于曲线半径方向发生偏离,此时经过时间t后车辆还未超出虚拟轨道安全范围,还需经历时间t′,车辆到达N′点,车辆距离虚拟轨道中心线l,此时给予车辆警告信号采取相应措施。
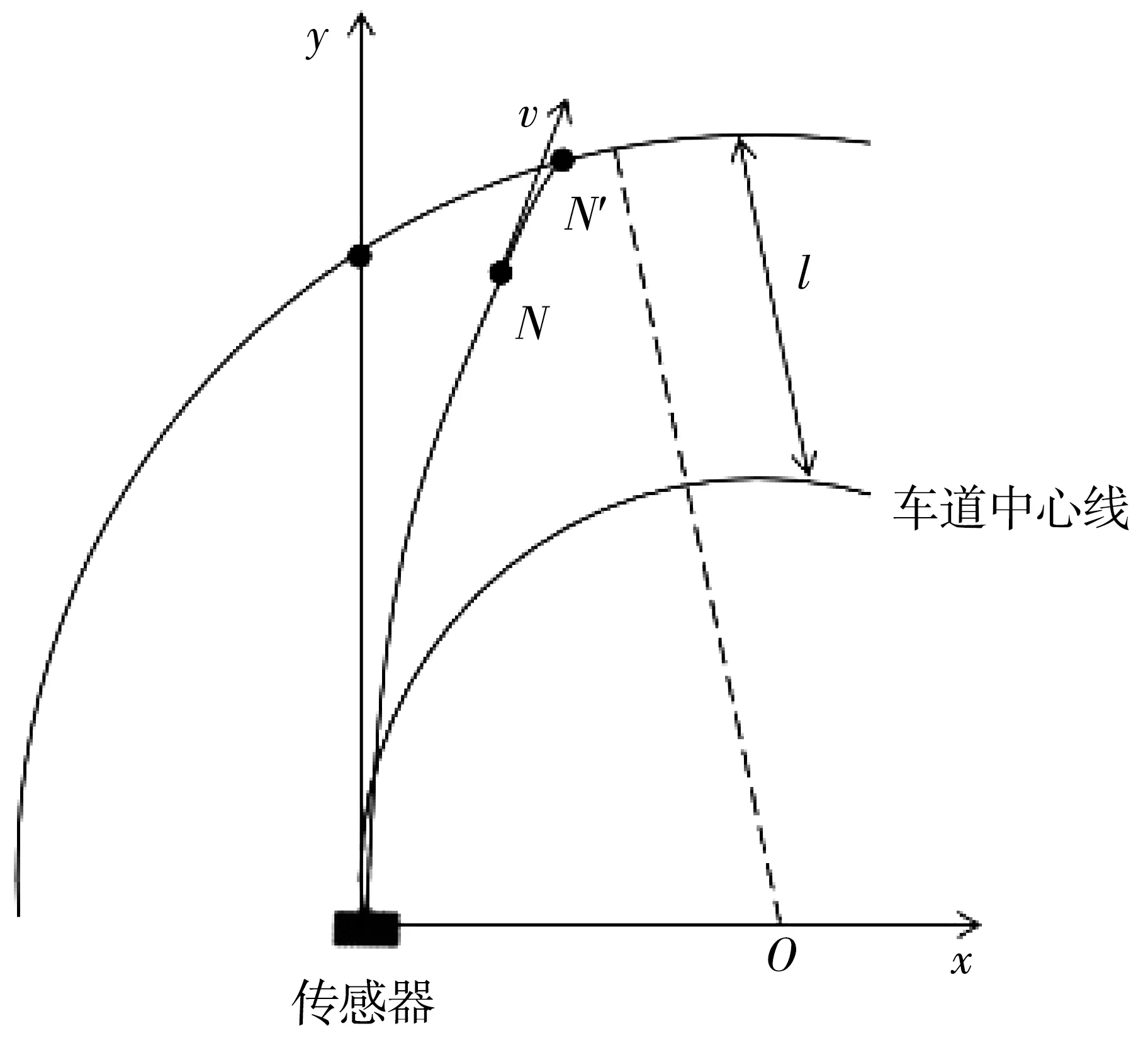
图7 小角度偏离
故若以更小的角度发生偏离,所需时间更长,Δd值变大,故以式(18)做为判断条件,都可保证车辆偏离虚拟轨道中心线的距离小于l。
4 模型分析验证
4.1 直线路段分析验证
假设道路传感器安装在路肩上,单车道宽为3.7 m,即a=1.85 m。借鉴文献[15]研究结果,车辆沿虚拟轨道中心线行驶时,一般认为偏离中心线超过0.5 m才会影响到自身安全和其他车辆正常行驶。超高速公路虚拟轨道系统是将车辆限制在虚拟轨道安全范围内行驶,保证车辆不会驶离虚拟轨道安全阈值范围,保证超高速公路行车的安全性。在JTG B01—2014《公路工程技术标准》中规定了小客车总宽为1.8 m,在单车道内车辆还有较大横向安全空间。故笔者在研究超高速公路虚拟轨道系统时,考虑选取脱轨临界值l1=0.50 m、l2=0.75 m、l3=1.00 m进行研究。如图8,假设当车身偏离虚拟轨道中心线的距离l分别超过l1=0.50 m、l2=0.75 m、l3=1.00 m,达到脱轨的临界值。将l和a值带入式(3)和式(4)中得到汽车行驶在超高速公路直线路段,偏离虚拟轨道安全范围时的预警信号值如表2。

图8 直线路段偏离虚拟轨道
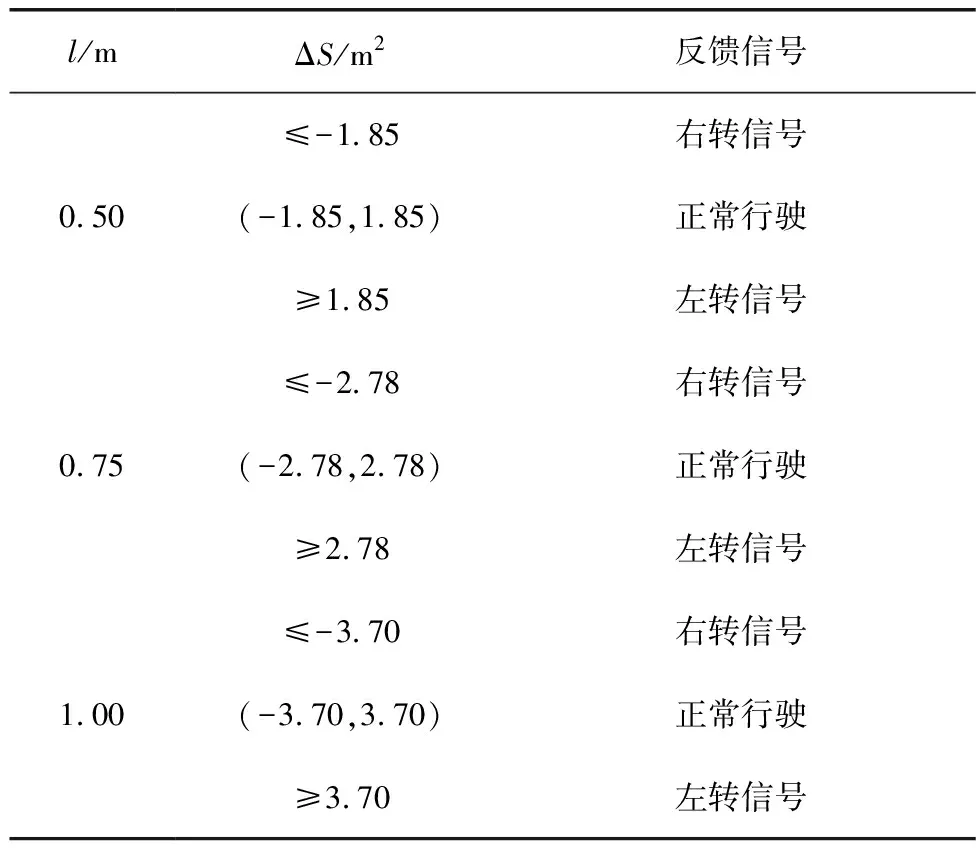
表2 直线路段预警信号
汽车行驶在直线路段上,当偏离轨道中心线阈值为0.50 m时,汽车信号器接收到反馈信息,信号器接收到ΔS≤-1.85或ΔS≥1.85时,汽车做出相应的转向操作;当偏离轨道中心线阈值为0.75 m时,汽车信号器接收到反馈信息,信号器接收到ΔS≤-2.78或ΔS≥2.78时,汽车做出相应的转向操作;当偏离轨道中心线阈值为1.00 m时,汽车信号器接收到反馈信息,信号器接收到ΔS≤-3.70或ΔS≥3.70时,汽车做出相应的转向操作。
4.2 曲线路段分析验证
将传感器每隔一段间距安装在虚拟轨道中心线上。由式(9)可得,汽车行驶在曲线路段上时,方向盘转角以较大角度(速度方向)驶离虚拟轨道中心线时,驶出虚拟轨道安全范围所需要的时间与汽车行驶速度,曲线半径及偏离虚拟轨道阈值相关。取一般最小半径时的圆曲线路段进行分析,偏离虚拟轨道的阈值分别取l1=0.50 m,l2=0.75 m,l3=1.00 m。
一般最小半径是指各等级公路按设计速度行驶的车辆能保证其安全、舒适的最小一般圆曲线半径。JTG B01—2014《公路工程技术标准》中普通高速公路一般最小半径值是按超高值ih=6%~8%,横向力系数μ=0.05~0.06计算取整得到,并给出了计算公路圆曲线最小半径,当v=100 km/h和v=120 km/h时,取μ=0.05,ih=0.06。徐金良等[22]在计算最小圆曲线半径和不设超高最小半径时,参照JTGB01—2014《公路工程技术标准》中规定的超高值和横向力系数值计算。张玥[23]在计算一般最小半径时,当v=100、v=120 km/h时,取值μ=0.05,和标准中取值相近。通过借鉴JTGB01—2014《公路工程技术标准》、文献[22]和文献[23],取表3所示参数ih=6%~10%、μ=0.04~0.06,分别计算得到圆曲线一般最小半径值。

表3 圆曲线一般最小半径
以超高6%、8%和10%的平均值ih=8%为例,计算得到汽车驶离虚拟轨道所需时间,即道路传感器布设的时间间隔如表4。

表4 圆曲线取一般最小半径汽车驶离虚拟轨道所需时间
由表4得,随着虚拟轨道安全阈值的增大,汽车驶离虚拟轨道中心线所需时间更久,道路传感器的布设间距更大。
由式(18)得知,汽车行驶在曲线路段上时,判断汽车驶离虚拟轨道中心线的条件与曲线半径、虚拟轨道安全阈值有关。由于曲线半径远大于安全阈值l,故经过化简得:
(19)
偏离虚拟轨道的阈值分别取l1=0.50 m,l2=0.75 m,l3=1.00 m,计算得到汽车行驶在曲线路段上时超出虚拟轨道安全范围的预警信号值Δd,如表5。

表5 驶离虚拟轨道中心线判断值
5 结 论
通过建立虚拟轨道模型,分别计算和分析了超高速公路直线路和曲线路段上保证车辆行驶在虚拟轨道安全范围内的阈值,研究结论如下:
1)当汽车行驶在超高速公路直线路段上时,理论距离与传感器检测距离的平方之差的绝对值|ΔS|<1.85 m2,|ΔS|<2.78 m2,|ΔS|<3.70 m2,就可保证车辆偏离中心线的距离分别小于0.50、0.75、1.00 m。
2)当汽车行驶在超高速公路曲线路段上,超高速公路设计速度分别为180、160、140、120、100 km/h时,道路传感器间的距离分别小于46.5、41.3、34.6、30.0、24.4 m,即可保证车辆偏离中心线的距离小于0.50 m;当道路传感器间的距离分别小于57.0、50.7、43.2、36.7、30.0 m,即可保证车辆偏离中心线的距离小于0.75 m;当道路传感器间的距离分别小于65.5、58.2、49.0、42.3、34.7 m,即可保证车辆偏离中心线的距离小于1.00 m。
3)偏离虚拟轨道的阈值分别取l1=0.50 m,l2=0.75 m,l3=1.00 m时,预警信号值Δd为2、3、4 m可保证车辆不超过虚拟轨道安全阈值。
笔者构建的虚拟轨道模型,为发展安全的超高速公路提供保障,同样为目前车道保持系统及智慧交通的发展提供借鉴。随着我国超高速公路及自动驾驶领域的发展,研究成果可保证车辆在超高速公路虚拟轨道安全范围内行驶,为建设具有安全保障的超高速公路提供依据。在未来的工作中,将考虑5G和传感器失效情况下解决虚拟轨道安全驾驶的问题。随着超高速公路的不断建设施工且投入运营,研究团队将进一步进行结合实车试验来验证虚拟轨道模型的准确性和安全性。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
工会博览(2022年5期)2022-06-30
中国交通信息化(2021年2期)2021-07-22
铁道通信信号(2020年3期)2020-09-21
建材发展导向(2019年11期)2019-08-24
铁道通信信号(2018年8期)2018-11-10
——目镜套筒
上海计量测试(2016年1期)2016-08-03
中外医疗(2015年5期)2016-01-04
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
