
合成孔径雷达与地面业务干扰共存仿真方法研究
2023-10-12 08:21刘吉凤李福昌中国联通研究院北京100048
邮电设计技术 2023年9期
刘吉凤,周 瑶,李福昌(中国联通研究院,北京100048)
频谱资源作为移动通信技术发展的核心资源,频谱划分将在很大程度上决定产业的发展方向、节奏和格局。干扰共存研究结果是频谱划分的敲门砖,干扰共存可行性研究通过之后才有可能启动频谱的划分标示。卫星业务以及地面业务的共存协同发展,有利于提高频谱利用率,促进无线通信的和谐长效发展。
合成孔径雷达(SAR)是一种星载相干侧视雷达系统,利用卫星的飞行路径模仿超大型电子天线或孔径,生成高分辨率的遥感图像。国际移动通信(IMT)技术为公众移动通信的发展提供了技术支撑,持续为6G 或未来技术寻求更多的IMT 频率资源,以满足不断增长的无线宽带数据和覆盖需求,以及IMT 产业和移动运营商与日俱增的新业务所需频谱需求,以支持其未来技术和应用的发展。干扰共存仿真研究的重点工作包括干扰系统以及被干扰系统建模、技术参数、传播模型以及仿真方法论等,针对地面系统干扰星载合成孔径雷达仿真研究,文章具体介绍了大面积干扰共存仿真方法论及其仿真效果。
2 合成孔径雷达系统介绍
合成孔径雷达是一种星载有源传感器〔EESS(active)〕,运行于非对地静止卫星轨道(非GSO)上。轨道通常是高度在350~1 400 km 的圆形。某些系统运行于太阳同步轨道上。一些传感器每天都对地球上的同一个区域进行测量,而另一些传感器则只在一个较长的(往往超过2 个星期)重复周期后才重复进行观测。卫星沿飞行方向前进,其天底指向地球的中心。天线主波束与地球表面法线之间形成一定入射角(°),与星下形成一定星下偏角(°),图1 所示为EESS(active)示意。波束的发射垂直于飞行方向,照射出一条扫宽。接入范围是指垂直于飞行方向的横向轨道尺寸,而方位角是指与飞行方向平行的纵向轨道尺寸。扫宽是指侧视雷达收集数据的地表带,是范围尺寸内成像部分的宽度。扫宽的纵向范围由航空器与地面间的相对运动来确定,扫宽宽度的测量与扫宽纵向范围垂直。

图1 EESS SAR成像几何原理
合成孔径雷达有3种扫描方式:带状图模式、扫描模式和聚光灯模式。常规SAR 带状图模式假设雷达天线指向平台轨迹的一个固定方向。带状图的图像宽度为扫宽的宽度,而图像的长度则是沿相关平台的飞行线路长度画出的等值线。在扫描SAR 模式下,SAR 可通过将天线扫向不同位置,照射若干子扫宽。聚光灯模式是SAR 模式中获得最高分辨率的方式,其通过电子方式调整雷达波束方向以对准目标,形成时间更长的合成孔径。聚光灯模式可将SAR 的成像分辨率提高至30 cm 以下。随着更多脉冲的使用,方位角的分辨率也有所提高。
原则上,SAR 是一种有源相控阵列天线。但SAR并未使用大量并列的天线单元,而是在时间复用条件下使用一个天线单元。天线单元不同的几何位置是平台移动的结果。SAR 采用源相控阵列天线,其天线模式如图2 所示。从图2 可以看出,其3 dB 波瓣宽度很窄,旁瓣较宽,地面照射范围较大。
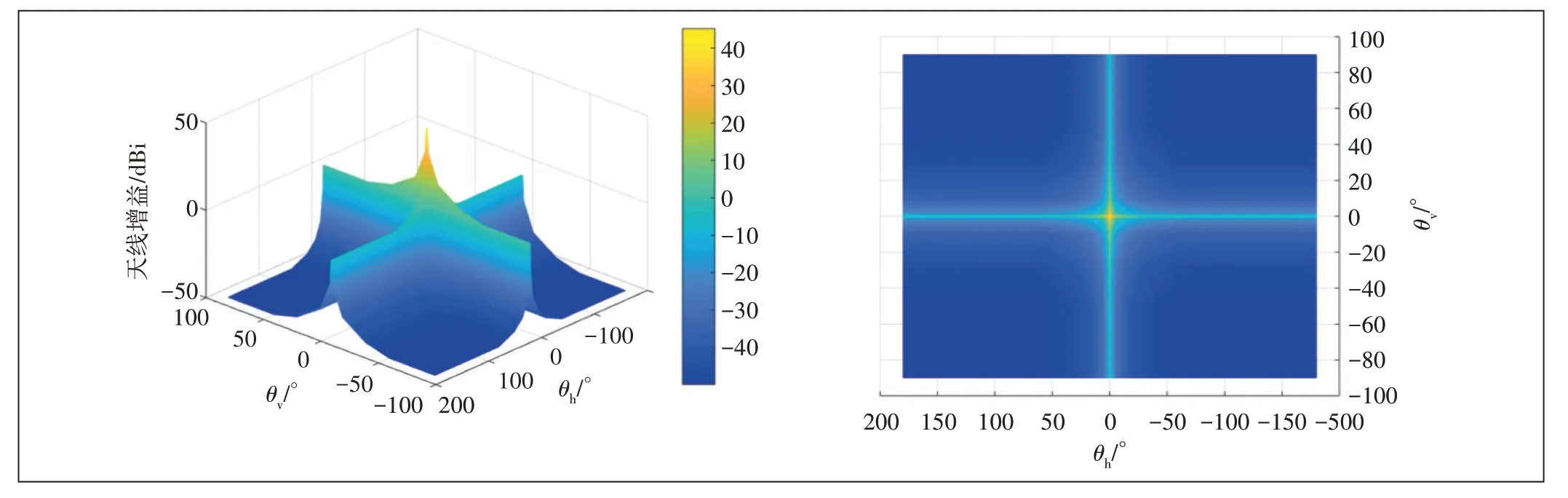
图2 SAR天线模式
考虑到合成孔径雷达采用有源相控阵列天线存在旁瓣干扰,地面业务对星载合成孔径雷达干扰共存研究中,将地面业务限制于主瓣范围内建模,有可能低估干扰,不利于发现部署过程中可能出现的问题。
针对地面业务干扰星载合成孔径雷达研究,大面积干扰共存仿真方法论在可视场范围内进行共存研究,规避低估干扰问题,有利于共存问题发现。
3 大面积干扰共存仿真方法论
3.1 大面积干扰共存方法
大面积干扰共存仿真牵涉到地图绘制、基站撒放以及合成孔径雷达天线增益计算,其中IMT 基站在整个可视场或部分可视场对应的大面积地球表面进行部署和分布。
3.1.1 位置坐标系定义及坐标系转换
卫星照射地球表面面积大,通常为千万km2以上,地面拓扑无法采用二维平面矢量建模,通常需要采用三维球体矢量建模。对于大面积内部署的站点或用户需要首先进行经纬度到球面坐标系的转换,然后基于球面坐标系数据进行距离角度等相关计算。图3(a)所示为卫星在地球上空运行轨迹瞬时截取图,图3(b)所示为空间一点采用三维建模方案示意。

图3 卫星运行轨迹及球面坐标系转化示意
球面坐标系定义:首先定义直角坐标系,地心为原点,赤道的一个面,再加上南北极一个轴。
坐标系转换:根据经纬度还有高度(lon,lat,alt)计算某一点的坐标(x,y,z);考虑地球等效半径以及该点高度alt,将其抽象成半径为R的圆,见图3(b),其中ϕ为纬度lat,α为经度lon,则:
3.1.2 地图绘制
由于地面覆盖面积超越一般国界甚至某一大洲,可能跨越江海湖泊、山川河流、沙漠戈壁、无人区等,因此需要引入地图绘制,以扣除上述区域,防止地面站出现在非地面部署典型区域。
如图4 所示,首先根据卫星运行轨迹确定研究的经纬度信息,同时结合卫星高度,确定可视场半径V;然后,根据式(4)和式(5)确定可视场边界对应的经纬度信息;最后,根据可视场边界经纬度信息,结合该区域地图信息逐一扣除上述区域。

图4 可视场边界经纬度信息确定
式中:
lon1、lat1——星下点经纬度信息
θ——可视场边界点到星下点连线与地理北的夹角,范围为0~360°
Re——地球等效半径
图5 所示为以西经100°、北纬35°为中心的1 900万km2的可视场仿真示例,可见:除海洋外,同时还存在墨西哥湾、五大湖等大范围水域,而对应水域并非IMT典型网络部署区域。

图5 研究区域地图绘制仿真示例
3.1.3 栅格划分与站点撒放
由于区域扣除后的地图为非规则图形,同时,大面积研究区域导致的基站或终端数量过多,也需要考虑仿真平台的处理性能。地面站的撒放需要对地面表面进行栅格划分。
栅格划分采用在地球表面分别按照经纬度以一定颗粒度进行划分,颗粒度大小主要考虑卫星坐标系中离轴角大小误差影响。虽然栅格越大越降低运算量、存储量,易于实现,但越远离实际情况,而影响的幅度暂不确定。因此,定义rate=alt/grid 宽度进行考量,其中alt为卫星高度,grid则为栅格大小。栅格划分可参照图6,可以看出赤道处栅格最大,随着纬度的增加,栅格面积将逐渐降低。

图6 栅格划分示意
在“地图绘制”结果对应的栅格中按照一定关系进行站点撒点,在栅格内采用均匀撒放的仿真效果图如图7所示,其中灰色为站点。

图7 西经100°、北纬35°可视场基站撒放仿真效果图
3.1.4 合成孔径雷达天线增益计算
大面积干扰共存仿真研究方法,由于地面很多基站或终端并非位于卫星主波瓣范围内,因此,需要对卫星天线进行精细建模。
采用笛卡尔坐标系定义合成孔径雷达天线,原点为卫星位置;Z轴为主波束指向,X和Y轴分别位于跨迹和沿迹指向,XOZ为俯仰角平面,YOZ为方位角平面,图8所示为合成孔径雷达天线坐标系定义示意。

图8 天线坐标系定义
合成孔径雷达的天线模式(见图2)为俯仰角以及方位角的函数,此种情况下,需要分别确定干扰链路与卫星俯仰角平面以及方位角平面之间的角度即可,可分为2 步实现,需要首先确定干扰链路在卫星俯仰角平面以及方位角平面上投影矢量,然后再确定干扰链路与两投影矢量间夹角。
a)方位角平面和俯仰角平面的确定。
(a)首先确定干扰链路在卫星俯仰角平面以及方位角平面上投影矢量,然后再确定干扰链路与两投影矢量间夹角。本节以西经100°、北纬35°为例进行描述。本节仅介绍方位角平面,俯仰角平面可以采用类似方法获得。
(b)为确定干扰链路在面YOZ(沿迹)上的投影,首先确定平面YOZ,进一步需要在该面YOZ上除OZ外确定一根直线或点,不在同一根直线上的3 个点确定一个平面。
(c)面YOZ投到地球上为图9 中黄色区域,橙色区域为卫星运行界面;同时,阴影部分为跨级平面,其与黄色区域(小黄圈)以及橙色区域(大橙圈)均垂直。

图9 方位角平面及矢量示意
(d)为简化,假设卫星总在西经100°经圈(大橙圈)上方运行,偏离星下点角度是确定的,例如35°。则,小黄圈和大橙圈二者分别所在的平面夹角为35°(即偏移星下点角度),交点为卫星所在位置,且交线经度不变。
b)面到点的抽取。通过第a)步已确定方位平面YOZ(黄色)和俯仰平面XOZ(阴影),可在其上任意抽取点,只要不与OZ在一条直线上即可确定平面,为方便计算,可抽取纵截面图中圆锥或球冠的中点分别作为Y,X。下面介绍点Y、X如何获得。
(a)在△OEZ'中,OE、EZ'以及∠EOZ'已知,则∠OEZ'以及ZZ'可获得。
(b)在△ZEM中,EZ、ZM以及∠ZEM已知,则EM可获得。
(c)在△EMY中,EM、EY、MY已知,则∠MEY可知,进一步可推出X、Y的经纬度信息。
3.2 大面积干扰共存研究步骤
本节基于3.1节的共存方法,给出地面IMT系统同频干扰星载合成孔径雷达研究步骤,若进行邻频共存研究,仅在干扰计算时考虑带外射频指标,此处不赘述。
步骤1:确定评估区域部署的IMT 基站总数。评估区域内部署的IMT基站数量,可由式(6)计算。
式中:
NBS——IMT基站总数
BSNLF——网络负荷因子
A——拟评估区域的面积(km2)
Ds——区域内IMT基站的分布密度(个/km2)
Ra——覆盖区域占建成区的比例(%)
Rb——建成区占区域总面积的比例(%)
以0.25°的经度、0.25°的纬度为步长创建栅格。0.25°×0.25°的面积大小等效于纬度为0°时的28 km×28 km。NBS均匀分布在每个栅格中,因此每个栅格中部署的BS数量取决于栅格区域的大小。
步骤2:生成IMT基站。IMT基站的位置统一部署在网格区域内。基站与卫星的仰角、方位角在同一网格区域内是相同的。BS 的水平方向为0~360°均匀分布。UE统一部署在BS的服务区域内。
步骤3:计算来自IMT系统的集总干扰。
步骤3.1:计算评估区域内每个BS 或UE 的干扰。合成孔径雷达接收机处每个基站或UE 发射机的干扰功率根据式(7)进行计算。
式中:
In——来自基站或终端的干扰(dBW/100 MHz)
Ptx——为BS 或UE 在EESS 带宽内的功率(dBW/100 MHz)
Gtx——BS或UE指向卫星方向的天线增益(dBi)
PL——传播损耗(dB),综合考虑视距损耗、大气衰减、波束扩展、极化损耗(3 dB)、地物损耗
Grx——合成孔径雷达在BS或UE方向的接收天线增益(dBi)
步骤3.2:计算对合成孔径雷达接收机的集总干扰。集总干扰按式(8)进行计算。
式中:
Itotal——研究区域内所有基站和终端到合成孔径雷达的集总干扰(dBW/100 MHz)
NBS——覆盖区域中基站总数
NUE——覆盖区域中终端总数
ATDD——TDD 激活因子
n——基站或终端索引
步骤4:计算IMT 系统对合成孔径雷达的干噪比(I/N),并根据定义的I/N保护标准进行比较。
4 应用性能分析
为分析大面积干扰共存仿真方法论的性能,本节采用蒙特卡罗思想搭建仿真平台,给出IMT 对合成孔径雷达集总干扰仿真数据以及平台运行分析。
4.1 仿真参数
4.1.1 IMT参数
IMT 仿真参数参考ITU-R WP5D 38#会议主席报告(见5D/716 号文件附件4.4),其中部署参数见表1,终端参数见表2,IMT-2020 AAS 基站的天线参数见表3,Ra和Rb见表4。
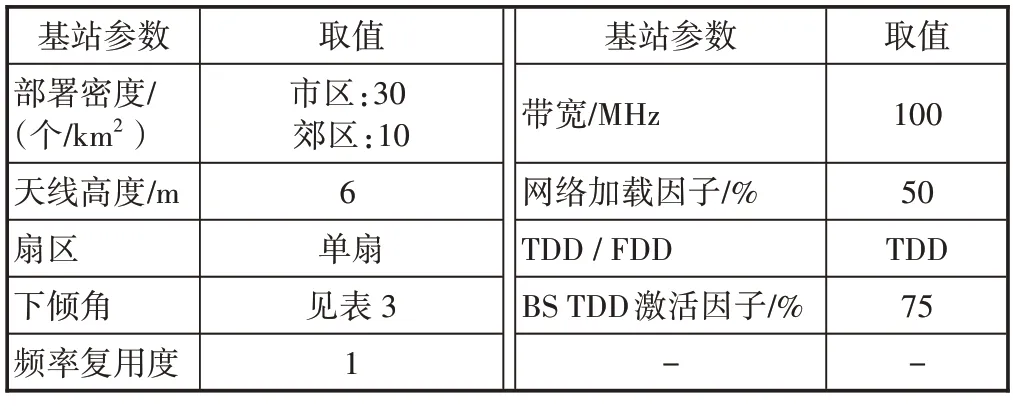
表1 IMT部署参数〔市区/郊区热点(室外)〕
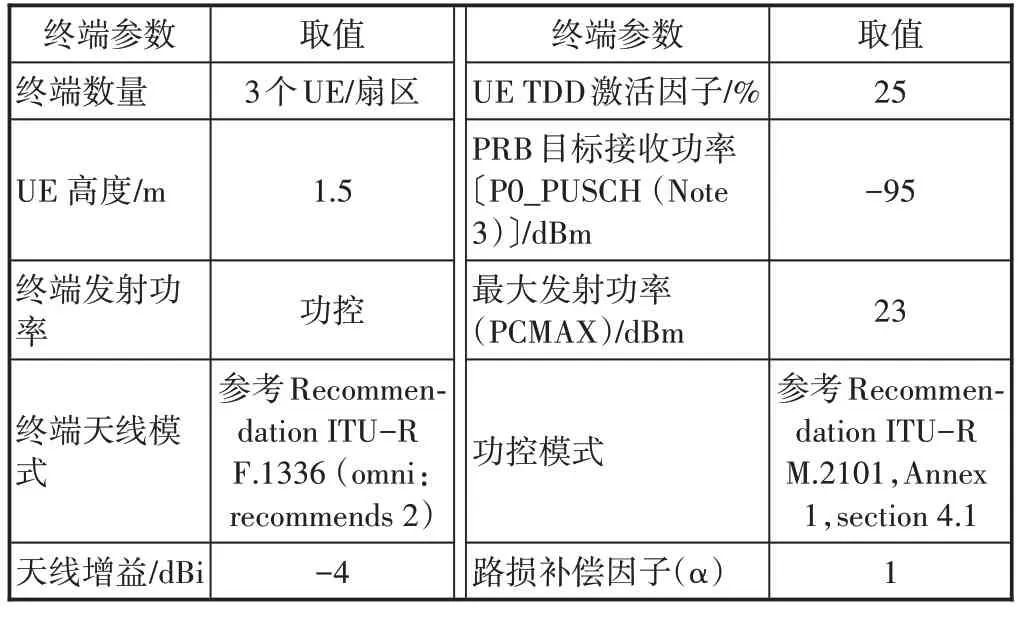
表2 终端参数〔市区/郊区热点(室外)〕

表4 较大区域部署Ra和Rb取值〔热点(室外)〕
4.1.2 星载合成孔径雷达(SAR)参数
合成孔径雷达仿真参数参考WP 7C 的联络声明(见文件5D/353)的SAR-4相关内容(见表5)。
4.2 仿真结果
采用蒙特卡罗思想搭建仿真平台,给出IMT 对合成孔径雷达集总干扰仿真数据以及平台运行分析结果,IMT 对合成孔径雷达集总干扰余量为13.2 dB,IMT对合成孔径雷达集总干扰CDF分布如图10所示。
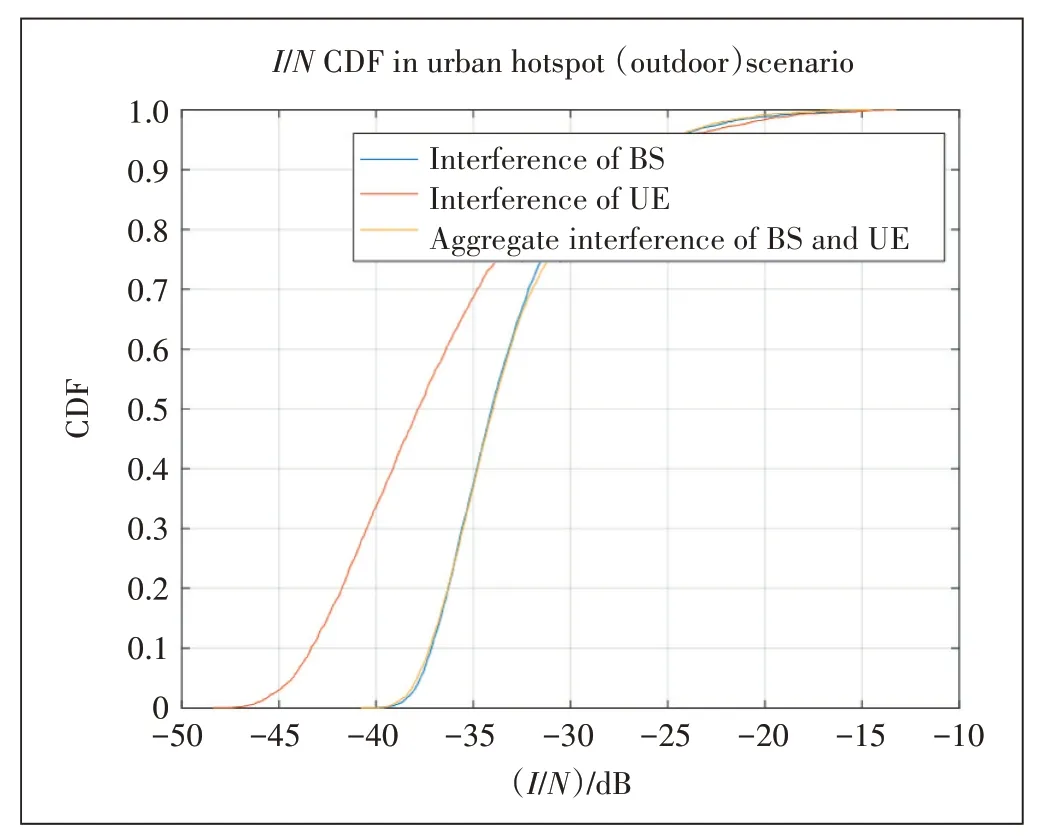
图10 IMT对合成孔径雷达集总干扰CDF图
仿真部署面积为12 625 211.869 km²,IMT 基站数为173 584 台,上述数据是10 000 次蒙特卡罗仿真运行结果,从图10 可以看出曲线平滑;且多次运行的数据偏差在0.05 dB 以内;仿真平台部署于内存256G/CPU 12核24线程服务器上,10 000次蒙特卡罗仿真的运行时间为1.5天。
5 结束语
本文研究了星载合成孔径雷达与地面业务干扰共存仿真方法论,并基于SAR-4 和IMT 系统仿真给出大面积干扰共存方法的运行性能,星载合成孔径雷达与地面业务干扰共存仿真方法论可应用于大面积部署系统与星载系统间干扰共存研究,并可高效运行,及时有效输出仿真数据。
猜你喜欢
电气技术(2023年7期)2023-08-08
现代电子技术(2022年18期)2022-09-17
中国光学(2021年6期)2021-11-25
卷宗(2021年2期)2021-03-09
化工进展(2020年4期)2020-05-08
空间科学学报(2020年4期)2020-04-22
中国医疗设备(2019年1期)2019-01-15
河南科技(2015年18期)2015-11-25
激光与红外(2015年10期)2015-03-23
中国舰船研究(2015年2期)2015-02-10
