
5G毫米波室内单站定位技术研究
2023-10-12 08:21李红霞杨洁艳苏成双中国联通重庆分公司重庆403中国联合网络通信集团有限公司北京00033
邮电设计技术 2023年9期
李红霞,杨洁艳,苏成双(.中国联通重庆分公司,重庆 403;.中国联合网络通信集团有限公司,北京 00033)
1 概述
随着人类经济社会的发展,地理位置信息越来越被重视。实时的地理位置信息不仅方便了人们的日常生活,也给国防与公共安全提供了重要保障,在经济社会的发展中发挥了不可替代的作用。室外环境下人与车辆的定位与导航主要依靠全球定位系统(Global Position System,GPS)[1-2],但是室内环境下由于建筑物的遮挡,卫星信号严重衰减,因此无法使用GPS 进行定位。与此同时,人们室内的公共活动日益频繁,对室内位置信息的需求越来越大,因此室内定位技术显得非常重要。目前5G 定位技术都还处于实验阶段,在室外可以采用信号到达角(AOA)或者上行到达时差(Uplink Time Difference of Arrival,UTDOA)的方式实现定位。
作为室内定位核心技术的二维AOA 估计技术[3-4]也随之成为研究焦点,基于角度的定位技术一般需要估计出信号到各个基站的到达角(AOA),然后利用三边定位方法对目标进行定位。在阵列信号处理领域,超分辨算法通常是利用天线之间的波程差对信号的AOA 进行估计,随着毫米波与太赫兹等高频信号的普及,天线间距难以满足半波长采样定理的要求,导致子空间类参数估计方法估计结果出现混叠现象,无法进行角度估计。
本文提出一种毫米波室内单站定位技术,首先采用基于天线阵列混合波束的超分辨二维AOA 估计技术,将4×4 的天线阵列用合路器合路为四通道进行接收,减少硬件资源开销。合路信号在保证整体孔径大小的前提下大幅提高了信号强度,同时可避免相位偏移。结合稀疏重构技术,解决实际环境中可能出现快拍数少的问题,并且解决由于虚拟天线的间距无法满足奈奎斯特采样定理的问题,实现信号的精确重构。
2 毫米波单站定位算法描述
毫米波室内单站定位技术,主要包括毫米波信号室内传播信道仿真模型与基于AOA 信息的高精度室内单站定位算法。首先通过毫米波室内信道建模,模拟毫米波室内传播的真实特征,还原实际场景中的形状、材质以及电磁特性,分析信号从发射到接收过程中实际的路径损耗和传播路径。然后,利用获取的信道状态信息(CSI),结合正交匹配追踪算法,实现AOA参数的超分辨估计。最终,利用非可视路径(NLOS)的传播特点,研究仿射传播路径聚类、多径参数提取、多径路径分离、位置信息非线性优化,形成单站定位方案。最终结合Wireless 网络仿真平台验证方案可行性,同时搭建PC 端demo 演示界面实时显示定位结果与误差分析(见图1)。

图1 毫米波单站定位整体流程
2.1 基于毫米波混合波束赋形的信号模型
本文采用4×4 毫米波阵列天线结合4 通道进行毫米波信号收发,再利用耦合后的4 路信号进行二维AOA 参数估计。天线耦合示意如图2 所示,耦合后虚拟天线之间的间距d=λ,其中λ为信号波长。

图2 毫米波阵列天线耦合示意
为了方便描述混合波束赋形[5]后的信号模型,图3(a)给出了天线来波几何模型示意,图3(b)给出了混合波束的四天线合路成单虚拟天线的来波几何模型,其中天线0 为混合波束的虚拟相位中心,红色线条为真实来波方向。

图3 混合波束赋形模型
其中,θ、ϕ和α、β、γ之间的关系为:
天线1、2、3、4与天线0之间的相位差为:
其中,d为天线间距。
天线增益相同,表示为a,虚拟天线相位中心为ψ(t),混合后的信号表达式为:
利用欧拉公式展开可得:
其相位与虚拟天线的相位一致,因此可将矩形混合阵列天线的相位中心等效为矩形中心的虚拟天线。
因此,混合波束后,虚拟天线的混合信号可表述为:
将式(5)化简后得:
同理,目前主流的毫米波天线阵子数量为512 或者1 024,由于天线几何模型未变,只改变天线间距对阵列流形不产生本质影响,仍可利用本方案进行超分辨参数估计与目标定位。
2.2 基于OMP算法的超分辨二维AOA估计技术
基于超分辨参数估计的核心思想是利用获取的CSI 估计出真实环境中信号物理传播路径的相关参数(即信号波达角AOA 以及信号达到时间TOA)。传统的AOA 估计技术是采用天线阵列的方式,需要天线之间的间隔小于等于半波长,而在本文中,由于虚拟天线的间距大于半波长不满足奈奎斯特采样定理,传统的子空间参数估计方法(MUSIC 等)不适应于本项目。本文基于OMP 算法[6-7],将稀疏信号恢复算法用于信号参数估计,对待估计的二维AOA角β、γ进行估计。
利用虚拟阵列的阵列流形构造字典矩阵。结合天线混合后的虚拟阵列模型,构造信号的阵列流形。以图2 中的虚拟天线1 为参考信号时,天线间的相位差为:
其中,d为虚拟天线的间距,f为信号载频,c为光速。将四通道信号进行幅值归一化处理后,可构造阵列流形为:
利用横排天线与竖排天线分别构造观测矩阵Θ(β)=[ 1e-j2πfdcosβ/c]T与Θ(γ)=[ 1e-j2πfdsinγ/c]T,即可实现对角度β和角度γ的稀疏观测。同时结合γ与α、β之间关系cosγ=cosβcosα,也可实现对角度α的观测。构造的字典矩阵即为Θ(β;γ)=Θ(β)⊗Θγ(γ),⊗为克罗内克积。
假设天线阵列天线数为M、β和γ的搜索范围和搜索步长确定的搜索角度值组成向量searching_β和searching_γ。因此,由β的第i_β〔1≤i_β≤length(searching_β)〕个搜索角度构造的原子为:
其中,Θβ=Θβ(i_β),1≤i_β≤length(searching_β),Θβ的维度为M×length(searching_β),f为信号频点,d为天线之间的间距,c为光速。
由第i_γ〔1≤i_γ≤length(searching_γ)〕个搜索时延构造的原子为:
其中,Θγ=Θγ(i_γ),1≤i_γ≤length(searching_γ),Θγ的维度为M×length(searching_γ),Δf为子载波之间的间隔。
因此,由第i_β个搜索角度和第i_γ个搜索时延构造的字典矩阵为:
其中,Θ的维度为2M×[length(searching_β)×length(searching_γ)]。假设接收阵列接收到的接收信号为y,初始化残差r0=y,索引集Λ0=∅,将字典矩阵中的每一个原子,即字典矩阵的每一列分别与残差进行内积运算,找到字典矩阵中与残差的投影系数最大的原子,并将该原子从字典矩阵中删掉。然后更新残差值rt=,t=t+1。直到满足迭代终止条件t>K,此时,K表示待估计的信源个数。因此待估计信号的β和γ2 个参数就等于依次找出的字典矩阵中与残差的投影系数最大的原子对应的β和γ。再利用关系式cosγ=cosβcosα,可获得俯仰角α的估计值。
图4 给出了OMP 算法示意,图5 给出了OMP 算法流程。
图4 OMP算法示意

图5 OMP算法流程
考虑实际场景下,信道对信号的传播会带来3 种影响:信号的幅度衰减、信号的传播时延和信号多径效应,基于此可以建立以下的时变的信道模型:
其中,h(τ,t)表示信道在t时刻对t-τ时刻发出的脉冲的响应,an(t)代表第n条路径上的时变信号的衰减因子,τn(t)代表传播时延,fDn表示多普勒频移。考虑到终端的移动速度有限(实际场景中,如果可获取终端的移动速度,即可估计出信道相干时间,在相干时间内信道保持相对稳定,因此在该时间段内获取的CSI 也相对稳定),那么物体由于相对移动造成的多普勒频偏较小,因此,式(12)可以简化为:
其中,h(t)是信道在t时刻发送的脉冲响应,an代表第n条路径的信号衰减因子,τn代表第n条路径的传播延迟。
2.3 基于仿射传播聚类的直射路径选择
在通过基于OMP 的二维AOA 计算法得到室内环境下多径信号的角度参数超分辨估计值之后,需要分辨出其中的直射路径,如果直接把空间谱峰值最大的认定为LOS 路径,可能会造成较大的偏差。本文采用仿射聚类[8]的方法,对OMP 算法估计出的空间谱峰值及极值点作聚类处理,由于直射路径较稳定,所以将会有更多的TOF 和AOA 极值点聚在一起,需要说明的是,估计出的TOF由于存在相位误差,不是真实的时间值,所以只做聚类使用。
对估计得到的TOF和方位角极值点进行归一化处理,将任意2 个样本点的相似度记为欧式距离平方的负值,作为S中的元素,如式(14)所示:
其中xi和xj表示任意2 个极值点,N为样本点个数。利用式(14)计算每个极值点和其他剩余极值点之间的相似度存入S中,然后将S作为算法的输入。同时,定义S(i,j)主对角线上的元素为自相似度S'(k,k),一般为常数,也叫作偏向参数p(k)。事实上,自相似度也可以定义为:
首先将相似度和自相似度组成的矩阵作为仿射聚类传播算法的输入参数,同时还有2 个重要的交换信息在极值点之间传递:吸引度R(i,j)和归属度A(i,j)。吸引度R(i,j)从样本点i指向样本点j,用于描述点j作为点i聚类中心的合适程度,归属度A(i,j)从样本点j指向样本点i,用于描述点i作为点j聚类中心的合适程度。仿射聚类传播算法通过不断搜索更新R(i,j)和A(i,j),直到产生稳定的聚类中心和各个极值点的类归属情况,或者达到最大的迭代次数,如式(16)和式(17)所示:
在计算过程中,先对A(i,j)初始化为0,利用上面的迭代过程就可以计算R(i,j)的初始值,最后输出稳定的聚类结果。
2.4 单站定位模型
采用几何位置关系定位原理[9](见图6),终端一般由人员随身携带,距离地面的高度为h=H-L,利用几何位置关系,结合毫米波天线与终端之间的距离L,可以计算终端位置点Q的坐标为:

图6 几何位置关系定位原理
其中P(a,b)为中央位置点的坐标。
3 仿真结果分析
3.1 基于Wireless InSite搭建环境模型
Wireless InSite[10-11]采用先进的高频电磁处理方法,使其可以在50 MHz 到100 GHz 频段内提供精确的计算结果。Wireless InSite 可以实现室外到室内混合场景传播建模的能力,能够仿真和分析室外发射机在室外的覆盖,以及穿透建筑物后在建筑物内部的传播路径预测和场强覆盖。
本文在Wireless InSite 中,建立一个典型的办公场景(见图7~图9),并根据实际情况选择波形、天线、发射与接收点、学习模型、通信协议等相关参数,其中实验参数中,频率设置为26.5~27.3 共800 MHz,信噪比为10 dB,子载波间隔为120 kHz,并设置1 条直射路径以及19条反射路径,设置流程如图10所示。

图7 办公环境建模

图8 行走轨迹

图9 随机发射点电磁传播特性第一视角

图10 Wireless InSite 总体建模流程图
第1 步:读取Wireless InSite 产生的仿真数据。数据内容包括1 条直达径和19 条反射径的干扰径数目、信号强度、接收相位、到达时间、俯仰角、方位角等信息,其中路径的信号强度、俯仰角和方位角是我们需要的信息。
第2 步:将读取到的俯仰角和方位角结合天线阵列形式得到阵列流形矩阵和信号,加上高斯白噪声生成最终信号,即天线接收到的信号。
第3步:对天线接收到的信号进行信号估计,采用OMP算法进行二维角度估计。
第4步:采用几何位置关系定位原理,根据天线的坐标得出目标的绝对坐标。
第5步:误差分析。
第6步:动态位置估计。
3.2 仿真结果及分析
仿真实验的电脑配置为:Intel(R)Core(TM)i5-10500CPU@3.10GHz 的处理器,16 GB 的内存(RAM),处理单个点的时间为0.5 s。利用Wireless InSite 软件建立室内模型,配置无线环境参数,仿真中设置的房间大小与真实环境保持一致。
二维AOA 估计结果如图11 所示。目标定位结果及误差分析如图12和图13所示。

图11 二维AOA估计结果

图12 目标运动轨迹
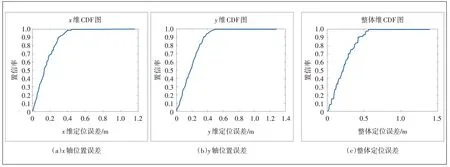
图13 误差分析
从图13 中可以看到,毫米波的定位精度相比sub6G 来说,得到了很大的提升,最高定位精度在米级以下。
4 结论
随着5G网络的规模部署,使得利用蜂窝网进行室内高精度定位成为可能。5G 毫米波带宽大、载频高、有极高的时间分辨力,在定位方面相比于sub6G 来说具有较大的优势。本文提出一种毫米波室内单站定位方法,利用信道状态信息,在毫米波混合波束赋形,即通道之间的间隔大于半波长的前提下,精准地估计出二维AOA 信息,并利用二维AOA 信息完成单站定位,无需基站之间的同步和数据同步等复杂操作;具有部署方便、低成本等特点。这种定位方法可复用在sub6G网络,解决室内定位需要站间同步的难题。
猜你喜欢
——2022 F1意大利大奖赛
世界汽车(2022年5期)2022-06-10
加油站服务指南(2021年7期)2021-10-14
雷达与对抗(2021年4期)2021-03-18
中国交通信息化(2017年10期)2017-06-06
电子制作(2016年1期)2016-11-07
学习月刊(2016年19期)2016-07-11
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
华东理工大学学报(自然科学版)(2015年4期)2015-12-01
电子设计工程(2015年8期)2015-02-27
现代防御技术(2014年6期)2014-02-28
