面向雷达数字化设计与仿真的仿真转台建模研究
2023-10-12 07:27陈晧晖李万玉
火控雷达技术 2023年3期
卢 冀 陈晧晖 李万玉
(1.西安电子工程研究所 西安 710100;2.中国人民解放军32382部队 北京 100071;3.西安市射频综合仿真重点实验室 西安 710100)
0 引言
数字化设计与仿真采用建模与仿真(M&S, Model and Simulation)技术,构建物理环境与实物的信息桥梁,用于实物研制的正向牵引、设计优化和验证评估,目前已被喻为设备研制的“孪生”技术,雷达数字化设计与仿真是建模与仿真与各种新的数字技术相结合提高雷达设计、调试、仿真、评估等研制与使用水平与效率的手段之一[1],与传统重资产型的雷达半实物仿真系统相比,前者因其采用数字化方式构建雷达、雷达环境[2-4]等模型,因成本、效率、灵活性等因素更适合于各种应用场景下的雷达性能评估。
目前,雷达半实物仿真系统广泛应用,并在雷达实装性能和功能测试与验证中扮演重要角色[5-7],积累了大量且宝贵的仿真数据和评估结果,因此在数字领域实现雷达半实物仿真系统的数学模型并进行仿真,通过对比可以更加全面的对雷达功能和性能进行测试和评估,并能提高雷达设计优化能力,为此,仿真转台的数字化建模是实现半实物仿真数字化需要首先考虑和解决的技术问题之一。
本文面向雷达数字化设计与仿真技术领域,针对半实物仿真中仿真转台的数字化,给出一种面向雷达数字化设计与仿真的仿真转台建模方法,并从仿真转台的五种典型运动模式,描述了仿真转台的建模方法,为雷达数字化设计与仿真领域半实物仿真数字化的研究和持续发展起到抛砖引玉的作用。
1 仿真转台模型设计
导引雷达半实物仿真系统中仿真转台通常采用三轴转台,提供俯仰、方位和横滚等姿态信息,在雷达半实物仿真中,仿真转台通过三轴的位置运动仿真雷达姿态,以及通过转台有规律的步进及转动运动仿真雷达运动装置的反馈性能,并且能够通过控制学方法仿真弹道的姿态信息,因此,仿真转台数学模型设计三轴的位置、步进、摇摆、转速和动力学运动,模拟转台的位置、步进、摇摆、转速和动力学运动,以满足多种仿真所需的俯仰、方位和横滚角度数据。值得一提的是,仿真转台数字化模型相比实物系统,因采用模拟方式,不受机械误差、运动能力、角度约束等影响,效率和精确性更佳,易于仿真结果数据分析。设计的仿真转台数字化模型的功能及参数描述见表1所列。

表1 五种运动模式的参数说明
2 仿真转台建模原理
2.1 位置运动

(1)

2.2 步进运动

(2)
其中:t是仿真时间间隔,δx和ωx表示方位、俯仰或横滚轴每次步进的角度和角速度。
2.3 摇摆运动
(3)
其中:t是仿真时间间隔;Cx、Ax和ωx分别表示摇摆运动中方位、俯仰或横滚轴的摆动周期、摆动幅度和摆动角速度。
2.4 转速运动

(4)
其中:Ex表示方位、俯仰或横滚轴总转动角度;ωx表示方位、俯仰或横滚轴转动角速度。
2.5 动力学运动
位置运动可根据运动姿态结果来计算变化过程中不同时刻的姿态信息,动力学运动的第n时刻的力矩Mn可以描述为
(5)
(6)

(7)

(8)
3 编程与实现结果
仿真转台数字化模型在Matlab软件中采用Simulink实现,便于形成层次化的数字模型的顶层架构和模块功能。仿真转台数字化模型的顶层设计文件,根据控制参数分别实现五种运动模式的控制,并根据运动模式的选择,输出转台的方位、俯仰和横滚的角度数据。仿真转台数字化模型顶层描述见图1所示。
在数字化顶层描述中,分别实现了第2小节中描述的位置运动、摇摆运动、步进运动、转速运动和动力学运动功能,每一种运动模式采用表一所列参数和上述计算原理,再根据具体的方位、俯仰或横滚轴幅度限制和坐标轴零位,确定幅度变化范围和正负取值,从而计算获得方位、俯仰及横滚角度信息。图2至图6分别显示了位置运动、摇摆运动、步进运动、转速运动和动力学运动数字模型的顶层描述、参数设置和仿真结果,在仿真中从Scope图中也验证了仿真转台数字模型及计算原理的有效性和模型的可用性。

图2 位置运动功能验证
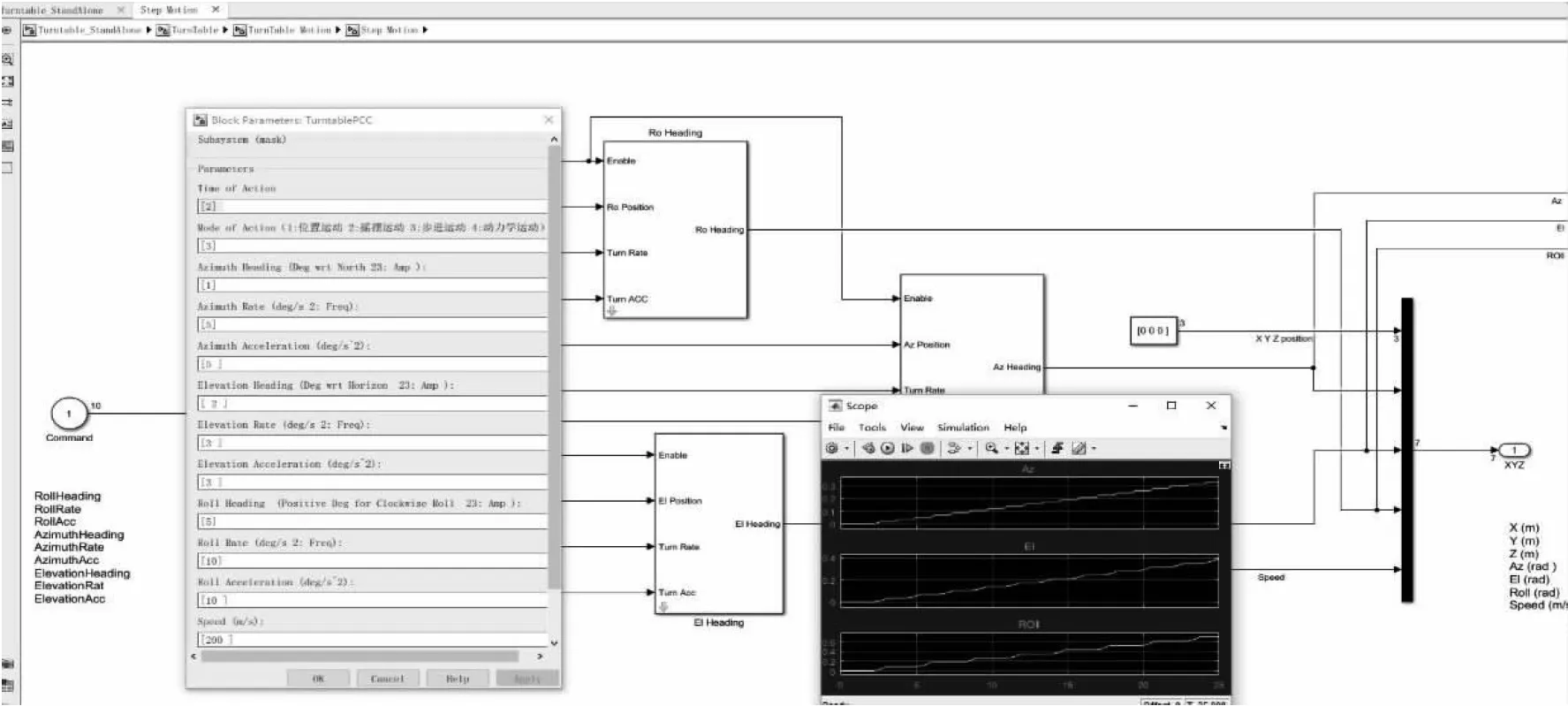
图3 步进运动功能验证

图4 摇摆运动功能验证

图6 动力学运动功能验证
4 结束语
针对雷达半实物仿真系统的数字化设计与实现问题,从仿真转台的数字化建模与实现入手,提出了一种面向雷达数字化设计与仿真的仿真转台建模方法,设计了仿真转台典型的位置、步进、摇摆、转速和动力学等五种运动模式的建模方式和计算原理,并给出了仿真转台数字化建模方法和具体的实现方式。最后通过实验结果验证了仿真转台数字化建模方法的有效性。
猜你喜欢
中学生数理化·中考版(2022年10期)2022-11-10
幼儿园(2021年12期)2021-11-06
环球时报(2020-02-18)2020-02-18
知识就是力量(2019年10期)2019-10-28
作文小学中年级(2018年10期)2018-10-29
电子制作(2018年1期)2018-04-04
湖南农业(2016年3期)2016-06-05
中国修辞(2016年0期)2016-03-20
幼儿100(2016年28期)2016-02-28
火控雷达技术(2016年2期)2016-02-06