
电动飞机飞行品质快速评估与验证
2023-10-29 01:49杨凤田周文雅
计算机仿真 2023年9期
张 磊,杨凤田,周文雅,黄 俊
(1. 辽宁通用航空研究院,辽宁 沈阳 110136;2. 沈阳航空航天大学辽宁省通用航空重点实验室,辽宁 沈阳110136;3. 沈阳飞机设计研究所,辽宁 沈阳110135;4. 大连理工大学航空航天学院 辽宁 大连116024;5. 北京航空航天大学航空科学与工程学院 北京100083)
1 引言
随着中国采取更加有力的政策和措施,减少二氧化碳排放,逐步实现碳中和,新能源飞机的发展进入了快车道[1,2]。区别于采用传统燃油发动机的飞机,电动飞机采用电机提供推力,电池提供能源,具有绿色环保的优点[3-5]。在飞行器初步设计阶段,通常需要快速计算出飞行器气动参数,进而对飞行器稳定性和操纵性进行快速评估[6],并为飞行控制律设计提供基础数据。因此,各种飞行器气动计算和仿真软件被开发出来。其中较为常用的气动力估算软件包括DATCOM软件[7-9]。尽管飞行器气动参数计算和仿真软件功能越来越强大,计算能力越来越强,但飞行器风洞试验仍然是不可或缺的重要环节[10],尤其是在需要精确气动参数数据的详细设计阶段[11]。尽管采用气动计算仿真软件和风洞试验方法,可以得到较为准确的飞机气动参数和飞行性能,但飞行试验仍然是不可或缺的验证手段[12-14]。
本文以沈阳航空航天大学和辽宁通用航空研究院研制的RX1E-A电动飞机为基准模型,采用DATCOM气动估算软件计算其气动参数和飞行品质。再采用RX1E-A飞机缩比验证机在中航工业气动院FL-8风洞[15]所做风洞试验气动数据,计算了该型飞机飞行品质,进而验证DATCOM计算的气动参数和飞行品质的准确程度。最后对RX1E-A飞机进行飞行试验,采集飞机舵偏产生的姿态角变化曲线,并根据飞行员评价,以此验证DATCOM计算的操稳特性的准确程度。
RX1E-A电动飞机为上单翼常规布局螺旋桨电动力飞机,RX1E-A电动飞机的基本参数如表1所示。
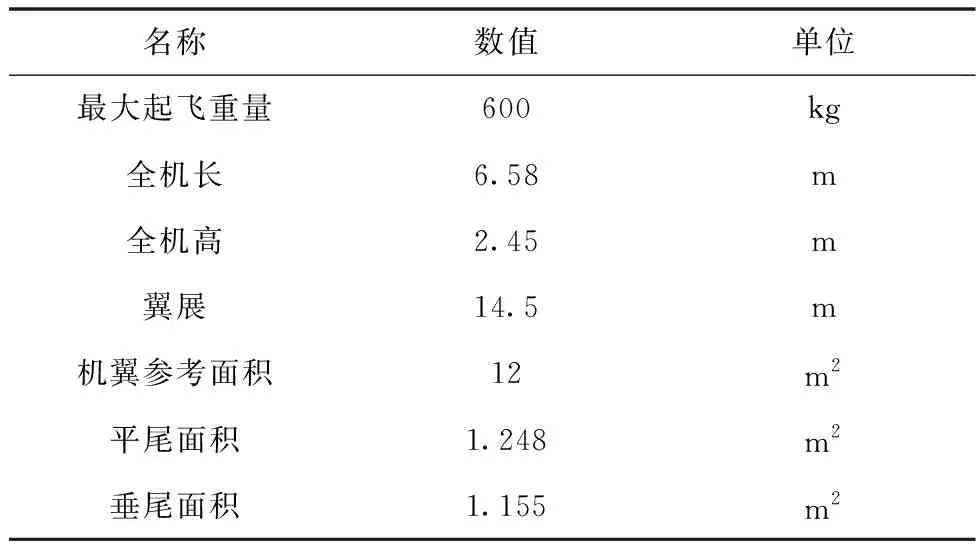
表1 RX1E-A电动飞机基本参数
2 电动飞机运动建模
本文着重推导绕质心转动动力学方程[16]。在地面坐标系中,有下式

(1)
式中:∑M为飞机所受外合力矩,L为飞机动量矩。
则有下式

(2)
将动量矩L写成下式
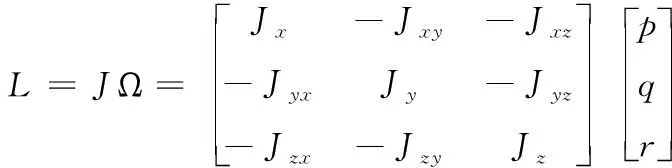
(3)
式中:J为飞机惯性张量,Jx、Jy和Jz为飞机对机体坐标系各轴的转动惯量,Jxy、Jyx、Jxz、Jzx、Jyz和Jzy为飞机对机体坐标系各轴的惯量积。
本文飞机建模时,没有按照常规的飞机为面对称飞行器的假设,而是把飞机出现机体不对称、质量分布不均匀的情况考虑进来。假设飞机惯性张量J在某一段时间内为时不变的常量,(2)式第一项可以可写成
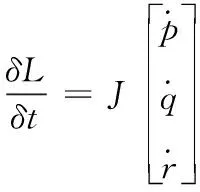
(4)
且,(2)式第二项可以可写成
Ω×L=S(Ω)JΩ
(5)
其中:S(Ω)定义如下
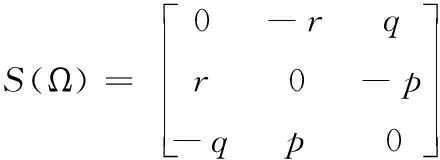
(6)
式中:Ω定义见(7)式。
Ω=pib+qjb+rkb
(7)
式中:p为滚转角速度,q为俯仰角速度,r为偏航角速度。
将外合力矩∑M在机体坐标系中分解,有
(8)
将(4)式、(5)式代入(1)式,可得
(9)
对(9)式两边惯性张量J求逆,则可得到在机体坐标系中建立的基于不对称飞机惯性张量的矩阵形式绕质心转动动力学方程
(10)
3 风洞试验对DATCOM计算气动参数验证
DATCOM气动力工程估算软件是为快速计算飞行器气动参数而由美国开发的,对于常规构型飞行器均能得到比较理想的气动数据。除此以外,DATCOM程序还可以计算高超声速飞行器气动舵效参数,程序计算时的限制条件是迎角需在0°到20°范围内,马赫数大于5;DATCOM程序还可以计算横向射流控制效果(Transverse-jet Control Effectiveness),程序计算时要求马赫数范围为2马赫到20马赫。
将DATCOM软件计算的RX1E-A飞机气动参数与风洞试验数据进行对比,升力系数随迎角变化曲线如图1所示。
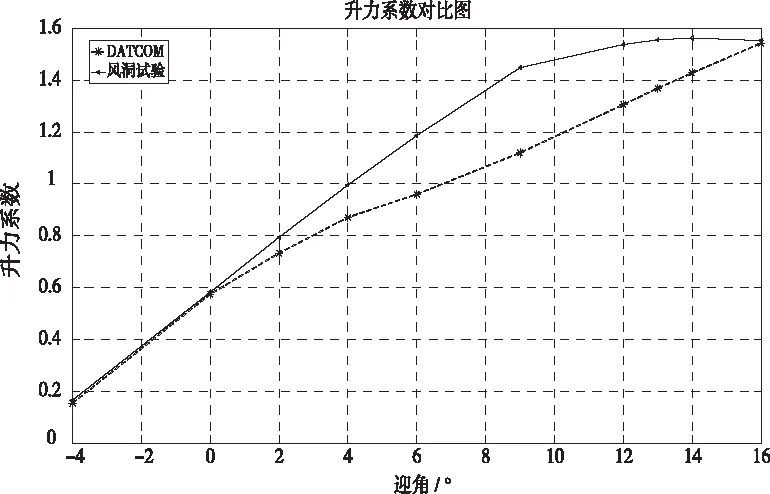
图1 升力系数随迎角变化曲线
DATCOM阻力系数与风洞试验数据对比如图2所示。
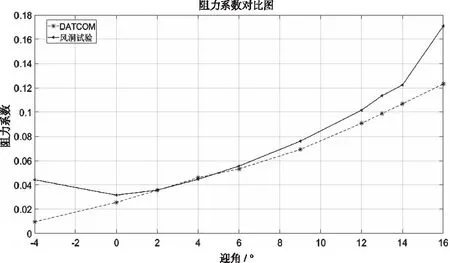
图2 DATCOM阻力系数与风洞试验数据对比图
俯仰力矩系数随迎角变化曲线如图3所示。
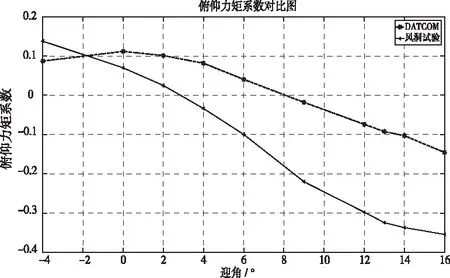
图3 俯仰力矩系数随迎角变化曲线
滚转力矩系数随侧滑角变化曲线如图4所示。
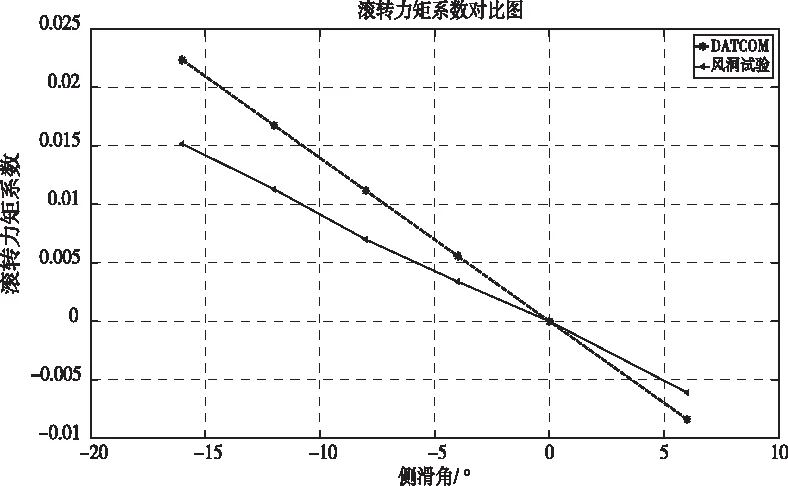
图4 滚转力矩系数随侧滑角变化曲线
副翼产生的滚转力矩系数随侧滑角变化曲线如图5所示。
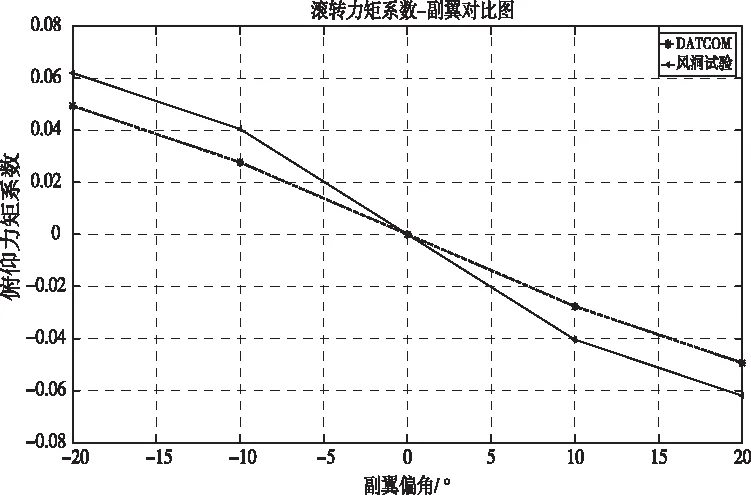
图5 副翼产生的滚转力矩系数随侧滑角变化曲线
升降舵产生的俯仰力矩系数随迎角变化曲线如图6所示。
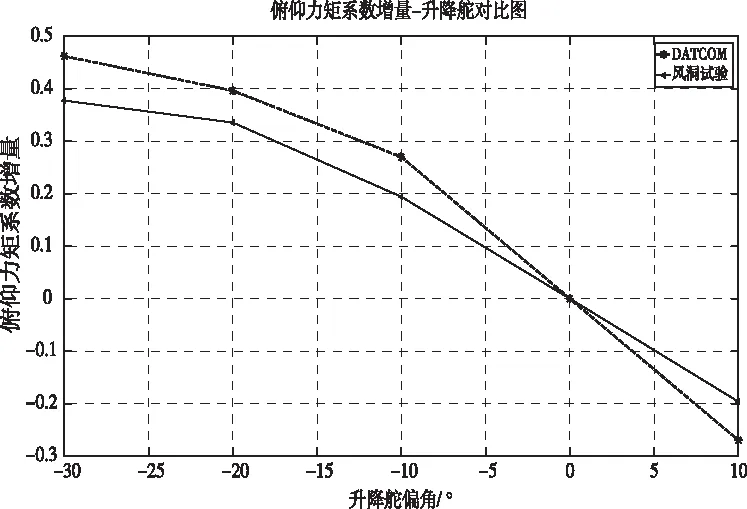
图6 升降舵产生的俯仰力矩系数随迎角变化曲线
从图1可知:DATCOM计算的升力系数在迎角处于-4°到1°范围内与风洞试验数据相近,在迎角处于1°到15°范围内比风洞试验数据小,在迎角为9°时两者差值最大,DATCOM升力系数为风洞数据的77%。
从图2可知,DATCOM修正后的阻力系数与风洞试验数据接近,尤其是0度到8度迎角范围内几乎重合。
从图3可知:DATCOM俯仰力矩系数在迎角处于-4°到0°范围时相差不大,在0°到16°范围内下降速率大约是风洞试验数据下降速率的一半,虽然此时DATCOM升力系数比风洞试验小一些,但笔者认为主要原因还是由于DATCOM升力作用点随迎角增加而后移的速度较小。
从图4可知:DATCOM滚转力矩系数随侧滑角变化速率为风洞试验数据1.5倍。
从图5可知:DATCOM计算得到的副翼偏转产生的滚转力矩系数约为风洞数据的77%。
从图6可知:DATCOM计算得到的升降舵偏转产生的俯仰力矩系数增量约为风洞数据的1.3倍。
4 风洞试验数据对DATCOM计算飞行品质验证
飞行品质对保证飞机飞行任务性能和飞行安全起到关键作用。其中飞机本体飞行品质是飞机操纵和飞行控制的基础。一架飞机在设计时需要关注飞行员操纵起来的感受,是否安全、有效和好飞。
GJB185-86《有人驾驶飞机(固定翼)飞行品质》对我国军用有人驾驶飞机在空中和地面的飞行和操纵品质提出了具体要求,用于保证完成任务和飞行安全。
电动飞机本体飞行品质基本要求和油动飞机基本一致,但电动飞机相比于油动飞机有如下特点:
1)电动飞机使用动力电池作为能源,在电动飞机整个飞行阶段,动力电池重量几乎不发生改变,因此电动飞机在整个飞行阶段,重量重心和转动惯量都不发生改变。
2)电动飞机依靠电机提供推力,电机在运行时不产生二氧化碳等有害气体,并且噪声很低,因此电动飞机具有对环境友好的特点。
3)电动飞机电机工作效率几乎不随飞行高度变化,飞行高度适应性较好。
4)由于现阶段动力电池能量密度没有燃油高,因此电动飞机通常设计成大展弦比,因此电动飞机的稳定性通常较好,但往往会牺牲一部分操纵性。
由于RX1E-A电动飞机重量不超过4500kg,最大法向过载不超过4.5,因此本文按照轻小类(QX)飞机,针对航向阶段(B种)整理其飞行品质要求,对应RX1E-A电动飞机的飞行品质标准如表2所示。

表2 RX1E-A电动飞机选用飞行品质标准
基于DATCOM计算气动数据进行RX1E-A飞机飞行品质分析,并用基于风洞试验数据进行的RX1E-A飞机飞行品质分析结果对其进行验证,具体如表3所示。
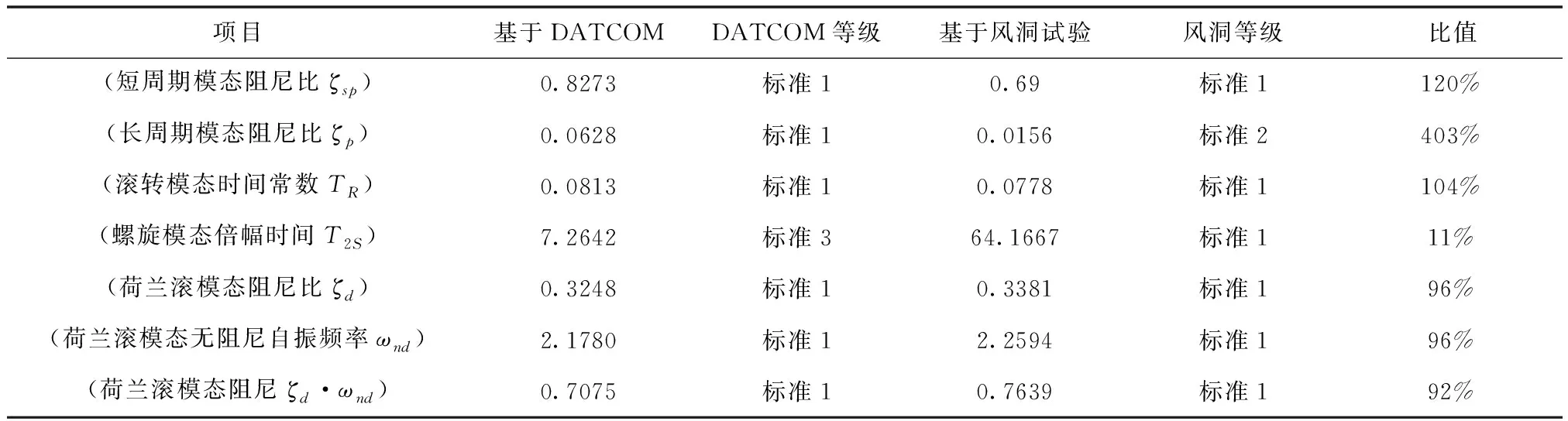
表3 基于 DATCOM与风洞试验飞行品质对比
从表3可知,基于DATCOM计算数据的RX1E-A电动飞机的飞行品质,除了螺旋模态满足标准3要求,其它模态都满足标准1要求。基于风洞试验数据的RX1E-A电动飞机进行飞行品质,除了长周期模态满足标准2要求,其它模态都满足标准1要求。基于DATCOM计算得到的长周期模态阻尼比ζsp是基于风洞试验得到的数据403%,基于DATCOM得到的螺旋模态倍幅时间T2S是基于风洞试验得到的数据的11%,其它数据都近似相等。
RX1E-A电动飞机滚转操纵性能也是按照轻小类(QX)飞机航向阶段(B种)要求进行判定,如表4所示。

表4 RX1E-A电动飞机滚转操纵性能要求
基于风洞试验数据,RX1E-A飞机副翼给定-1°阶跃输入和-1°舵偏角持续1s的短时输入对滚转角作用曲线如图7所示。其中阶跃响应为一条斜线,滚转角随时间线性增加,增加速率为2°/s,短时舵偏响应在开始到1s时间段线性增加,增加速率与阶跃响应相同,1s后响应曲线近似为一条水平线,但略有上升,俯仰角振荡周期约为20s。根据阶跃响应可知,副翼偏转20°时,滚转角从30°变化到-30°需要1.5s时间。满足轻小类(QX)飞机航向阶段(B种)滚转操纵性能要求中60度滚转操纵性能标准1。
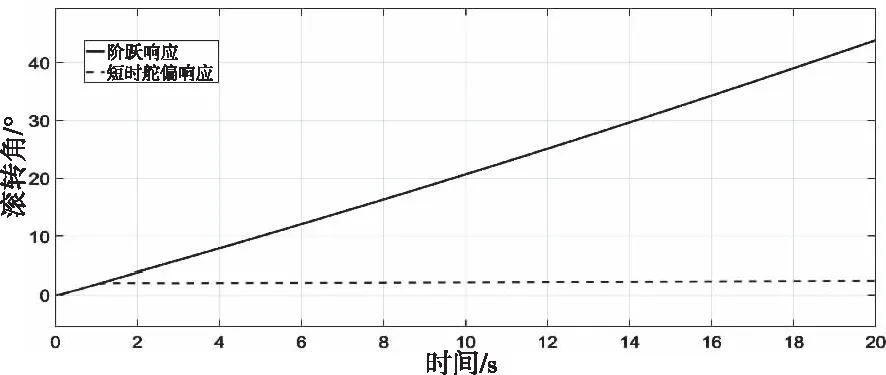
图7 基于风洞试验数据RX1E-A飞机-1°副翼偏角的阶跃响应和扰动响应
基于DATCOM数据,RX1E-A飞机副翼给定-1°阶跃输入和-1°舵偏角持续1s的短时输入对滚转角作用曲线如图8所示。其中阶跃响应在0s到5s时间段近似为一条斜线,滚转角随时间线性增加,增加速率为1.1°/s,短时舵偏响应在开始到1s时间段线性增加,增加速率与阶跃响应相同,1s后响应曲线近似为一条水平线,但略有下降,俯仰角振荡周期约为20s。根据阶跃响应可知,副翼偏转20°时,滚转角从30°变化到-30°需要2.7s时间。满足轻小类(QX)飞机航向阶段(B种)滚转操纵性能要求中60度滚转操纵性能标准3。
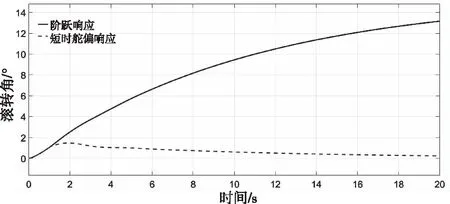
图8 基于DATCOM RX1E-A飞机-1°副翼偏角的阶跃响应和扰动响应
将基于DATCOM数据和风洞试验数据得到的滚转操纵性能参数进行对比验证,如表5所示。可知基于DATCOM数据的60°滚转操纵时间是基于风洞试验数据得到的参数的180%。

表5 基于 DATCOM与风洞试验滚转操纵参数对比
基于DATCOM计算气动数据,RX1E-A飞机升降舵给定-5°阶跃输入和-5°舵偏角持续1s的扰动输入对俯仰角作用曲线如图9所示。其中俯仰角阶跃响应经过300s仍振荡衰减,最终收敛至15°附近。迎角阶跃响应在开始后的1s快速变化,然后随着俯仰角的振荡而轻微振荡。俯仰角扰动响应经过200s振荡衰减,最终收敛至0°俯仰角。迎角扰动响应在开始后的2s快速振荡后收敛至0°附近,后期随着俯仰角的振荡而轻微振荡。
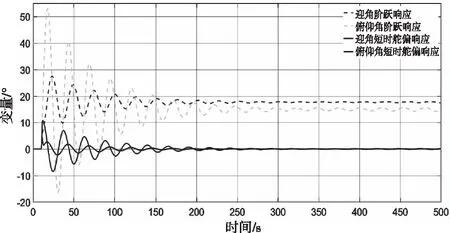
图9 基于DATCOM计算数据RX1E-A飞机-1°升降舵偏角的阶跃响应和扰动响应
基于风洞试验数据,RX1E-A飞机升降舵给定-5°阶跃输入和-5°舵偏角持续1s的扰动输入对俯仰角作用曲线如图10所示。其中俯仰角阶跃响应经过500s后仍然在振荡衰减,经过约1000s最终收敛至5°附近,迎角阶跃响应在开始后的1s快速变化,然后随着俯仰角的振荡而轻微振荡。俯仰角扰动响应经过500s仍然在振荡衰减,经过约700s最终收敛至0°俯仰角,迎角扰动响应在开始后的2.2s快速振荡后收敛至0°附近,后期随着俯仰角的振荡而轻微振荡。可知本机俯仰稳定性收敛稳定,满足正常飞行操纵要求。

图10 基于风洞试验数据RX1E-A飞机-1°升降舵偏角阶跃响应和扰动响应
从图9到图10可以看出,DATCOM计算数据的升降舵偏角阶跃输入产生的俯仰角响应在经过振荡稳定后是风洞试验数据得到的俯仰角的3倍。
5 飞行试验对DATCOM计算飞行品质验证
RX1E-A飞机进行飞行试验照片如图11所示。

图11 RX1E-A电动飞机飞行试验照片
试飞时,在RX1E-A飞机安装飞控采集系统,采集实际飞行中升降舵偏角、飞机俯仰角和飞机迎角,其中飞行试验中升降舵偏转作用产生的飞机俯仰角和迎角变化的曲线如图12所示。
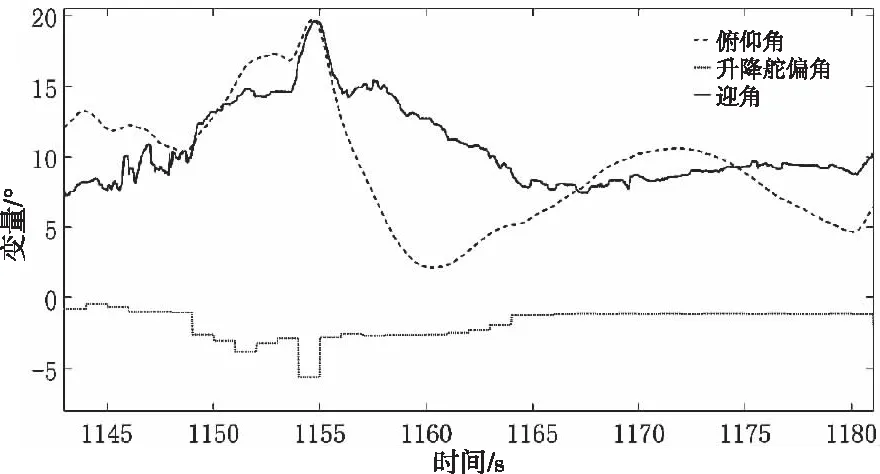
图12 RX1E-A飞机飞行试验升降舵偏转产生的飞机俯仰角和迎角变化曲线
图12中,横轴为飞机飞行时间,从本次飞行试验计时的第1150s开始,给升降舵一个不超过-5°偏角的偏转,可以看到飞机迎角从不到10°迅速上升到接近20°,经过快速的振荡后逐渐平稳,在升降舵偏角回中时,飞机迎角也迅速稳定在10°附近。飞机俯仰角也从10°附近上升到接近20°,然后缓慢振荡,在升降舵在1165s回中时,俯仰角仍然在缓慢振荡,在1180s时俯仰角仍然没有停止振荡,只是振荡收敛,幅度越来越小,振荡周期约为17s。本次飞行试验中升降舵偏转产生的迎角变化与图10基于风洞试验数据和图9中基于DATCOM数据的MATLAB仿真的迎角变化趋势一致,迎角变化属于纵向短周期运动,由于具有较大的静稳定恢复力矩,快速振荡后马上(几秒以内)就能稳定;飞行试验中升降舵偏转产生的俯仰角与图10基于风洞试验数据和图9中基于DATCOM数据的MATLAB仿真的俯仰角变化趋势一致,俯仰角变化属于纵向长周期运动,振荡虽收敛但缓慢,在升降舵回中后仍然需要较长时间(数十秒到几百秒)恢复到稳态,这个过程可以看成飞机势能与动能相互转化过程(假设飞机推力与阻力相等条件下),在这个过程中迎角几乎不发生变化,主要是飞机速度和高度的缓慢变化,由于飞机质量较大,惯性较大,而起恢复和阻尼作用的气动力相对较小,因此恢复过程非常缓慢。
在RX1E-A飞机进行飞行验证中,根据飞行员反馈,该机在给定短时副翼偏转并回中后,滚转角先增加,然后稳定在一个角度,并缓慢增加,与图7基于风洞试验数据的MATLAB仿真的变化趋势一致,但不同于图8中基于DATCOM数据的MATLAB仿真曲线。
6 结论
本文采用DATCOM气动计算软件,快速计算了RX1E-A飞机气动参数和飞行品质,并采用风洞试验数据和飞行试验数据对其进行验证,得到以下结论:
1)使用DATCOM计算飞机气动参数与风洞试验数据相比具有一定偏差,文中所列举各气动参数偏差在50%范围内,但基本满足初步设计阶段的需求。
2)基于DATCOM计算数据得到的飞机飞行品质与基于风洞试验数据得到飞行品质,在长周期模态ζp和螺旋模态T2S有较大偏差,在其它模态偏差很小,滚转操纵参数偏差可达80%。
3)由DATCOM计算仿真得到的升降舵阶跃响应和扰动响应与飞行试验采集实际升降舵偏对俯仰角和迎角影响趋势相近。
4)在飞机初步设计阶段,DATCOM软件具有快速高效的评估飞机气动参数和飞行品质的优点,尽量部分参数与风洞试验和飞行试验所得数据有一定偏差,但DATCOM快速估算方法仍有一定价值。
猜你喜欢
西安航空学院学报(2021年3期)2021-10-14
北京航空航天大学学报(2021年6期)2021-07-20
智富时代(2018年11期)2018-01-15
智富时代(2018年11期)2018-01-15
电线电缆(2017年5期)2017-10-18
北京航空航天大学学报(2016年9期)2016-11-16
科技传播(2014年4期)2014-12-02
重庆建筑(2014年12期)2014-07-24
中国铁道科学(2014年1期)2014-06-21
