基于多层视野的无人机局部路径规划算法
2023-11-03 06:03尚嵩刘明刚丁士强
新一代信息技术 2023年14期
尚嵩,刘明刚,丁士强
(海军航空大学,山东烟台 264001)
1 引言
在基于无人机的环境智能感知技术中,路径规划是非常重要的一环。无论使用何种传感器和计算方法来进行环境感知,无人机都需要能够安全无碰撞地到达目的地。因此,无人机路径规划是完成任务的关键问题之一。根据应用场景的不同,无人机路径规划可以分为全局路径规划和局部路径规划。全局路径规划适用于无人机工作环境已知的场景,而局部路径规划则适用于无人机工作环境完全未知或部分未知的场景。基于无人机的环境智能感知技术的目的是依靠无人机来完成对环境信息的感知。由于通常不存在先验知识,因此局部路径的效率对无人机任务完成的效果起着至关重要的作用[1]。
当前应用广泛的基于固定活动窗的VFH类算法,通过设计一个虚拟的视窗,即活动窗,来实现无人机的避障行为[2]。活动窗的范围是固定的,不能根据无人机所处的环境信息进行动态调整避障距离,这使得算法的环境适应性受到限制,特别是在一些稀疏障碍物和密集障碍物并存的环境中。如果活动窗设置过大,会导致原本存在缺口被认定为“不可通行”,使得无人机忽略了可通行区域,在环境特别复杂时,还会使无人机陷入局部停滞状态。相反,如果活动窗范围过小,无人机需要在靠近障碍物时才能察觉,容易引起路径的不平滑,有时还容易陷入“陷讲区域”。
文献[3]在基于3DVFH算法上实现了系统中的局部避障飞行模块,并基于本系统中无人机通过激光雷达可以360°感知障碍物信息。文献[4]克服人工势场法规划的航迹容易陷入局部最优陷阱和使用常规智能避障算法会使时间成本增加的问题,利用鸽群优化算法寻找最优预测距离。在文献[5]中,提出了一种基于改进速度障碍法的局部路径避障规划算法。将传统速度障碍法拓展到三维空间中,建立三维空间速度障碍模型。
本文在VFH算法基础上,提出了一种基于多视野多分辨率的无人机局部路径规划算法。该算法的特点是无人机的视野范围(活动窗)不再固定不变,而是根据无人机周围的环境状况实时调整,以增强算法的环境适应性。路径规划算法的输入数据是当前工作的环境模型,此模型需要构建并实时更新环境地图信息。通过多视野多分辨率的思想,算法可以更准确地识别环境中的障碍物和缺口,更好地进行避障规划。
2 方法介绍
算法基于固定活动窗的VFH算法[6-9],通过动态确定视野层次并对其进行分辨率处理,从而增强算法的环境适应性。然后,算法找出各层的候选通行方向,并计算它们的通行代价[10-12]。最终,算法根据通行代价确定本轮算法的目标方向,以实现更准确的避障规划。通过这种方式,算法能够更好地适应不同的环境,并更加准确地识别障碍物和缺口,从而更好地进行无人机的局部路径规划。
第一步是根据区域障碍物密度来划分视野层次。区域内障碍物密度d(destiny)是区域中所有障碍物数量和其矩形窗格的函数,定义如下:
式(1)中,l是障碍物矩形窗格的平均边长,M是障碍物的数量,s所选区域的面积。
视野层次的划分流程如下,设定一个障碍物密度阈值θ。然后以无人机中心为圆心,随机生成视野半径r,不超过传感器半径。在视野圆内,计算区域障碍物密度d。如果d大于阈值θ,则当前视野为最大视野层,逐渐减小r,当密度降至阈值以下时,确定为最小视野层。若d小于θ,则相反。类似于人类视野,远处视野模糊,近处视野清晰。所以各层分辨率的设置有两个参考因素,一个是与无人机的距离,另一个是环境复杂度。分辨率Res计算公式如下:
式(2)中,Resi表示第i层视野的分辨率。λ是分辨率校正参数。当该层障碍物密度d低于阈值θ时,意味着当前层障碍物密度低,环境简单,分辨率不要求很高,可以用上一次密度数据简单处理。而高于阈值时,意味着环境复杂,需要传感器仔细探索,参数采取指数形式的校正参数,而不是简单线性关系处理。低分辨视野层通过形态学闭操作将障碍物进行合并[13-15]。
轨迹搜索进行如下步骤:首先,将无人机的视野划分为多个扇形区域,如图1所示。图1表示在传感器距离范围内分成四层视野,中心是无人机质点,S1,S2表示视野层内继续划分的各级扇区。然后,统计每个扇区的环境复杂度。接着,根据预定的条件来判断该扇区是否可以自由通行。以扇区中线为可通行方向,完成整个轨迹搜索过程。这种算法的优点在于引入了多视野多分辨率层次,使得每个视野层次都有对应的数据,最终输出的自由扇区也更加准确。
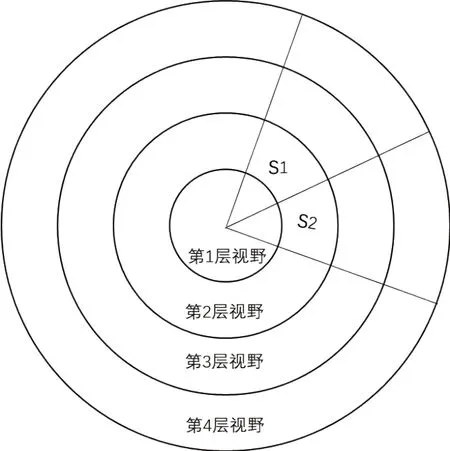
图1 视野和扇区划分示意图
扇区划分后计算各扇区的环境复杂度,计算公式如下:
Hv表示第v个扇区的环境复杂度。λi表示第i层视野的调整因子。k∈Si,v表示v个扇区中第i层视野中的第k个障碍物。ai,bi是i层视野常数,dk表示障碍物与无人机的距离,ri表示i层视野半径。
由扇区的环境复杂度确定通行扇区,只要低于阈值就认为该扇区为可通行。连续的可通行扇区可以进行合并,以减少后续通行代价的计算量。
最后是通行代价的计算,通过代价函数计算来判定评价候选方向的优劣。但因为引入了多层视野,所以需要分层考虑。除了通用代价函数[16-18],加入了候选方向附近区域障碍物复杂度的正则式,以更准确地标识各候选方向的通行代价,代价函数计算如式(4)所示:
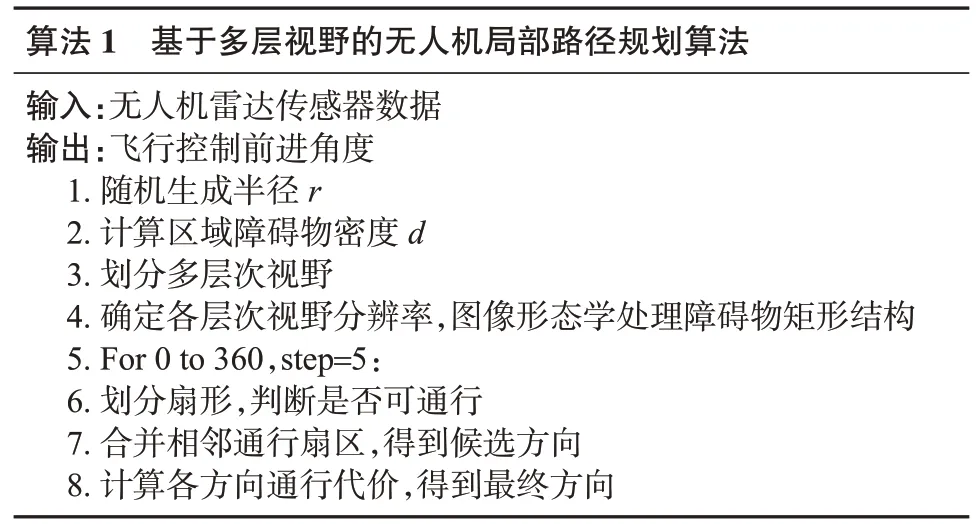
其中,θ表示候选方向的角度,θt表示与全局目标点的夹角,θn是无人机正对方向的角度,θn-1是上一轮前进方向的角度,dsl,dsr,dsc分别是候选扇区左侧,右侧和当前扇区的障碍物密度。λ1,λ2,λ3,λ4是四项权重系数,值越大意味着越倾向目标角度、不改变当前朝向、与上一轮规划一致和保证附近扇区障碍物最小的原则。算法1伪代码整体流程如下:
3 仿真实验结果与分析
3.1 参数设置
根据以上对无人局部路径的算法求解,无人机获取自身和障碍物的信息后,会建立一个多层多分辨率的视野信息,由以上信息来进行避障机动。为验证结果的有效性,本文采用Matlab进行仿真试验,基本参数设置为无人机速度v=20 m/s,传感器最大量程d=500 m,障碍物安全距离为8 m。障碍物为机动障碍物,初始信息如下:
假设机动性障碍物的速度方向角的最大不确定度ε=100,根据表1所示的障碍物场景,考虑到三种障碍物的机动性,为保证无人机路径安全,通过算法计算规避路线,用matlab软件记录了考虑障碍物机动性与无人机避障过程的相关参数。
3.2 仿真结果
为了评估自适应威胁距离对无人机避障的影响,在考虑动态障碍物机动性和保证障碍物安全距离的前提下,表2中的相关参数显示,无人机仍然能够成功躲避机动性障碍物。通过表中的UAV飞行状态改变点的坐标值,可以发现自适应威胁距离的引入使无人机延迟了飞行状态的调整,从而提高了原飞行路径的利用率。图2记录了无人机在当前情景下的偏航角与俯仰角的变化过程,均满足无人机的约束条件。从图2可以看出无人机的偏航角和俯仰角在3种障碍物下呈现出不同程度的变化,时间轴可以看出变化位置是符合预估的。
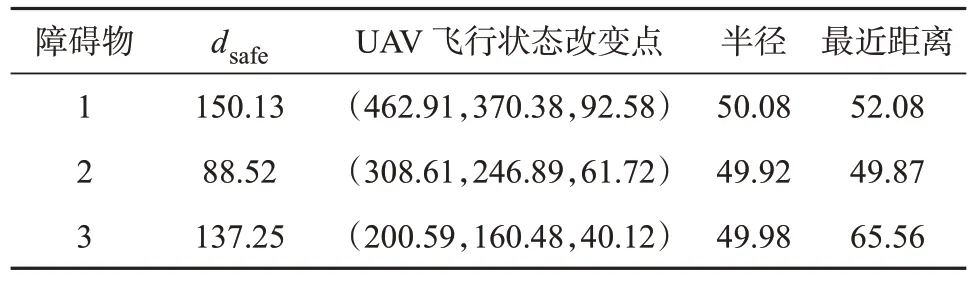
表2 无人机局部路径规划相关参数
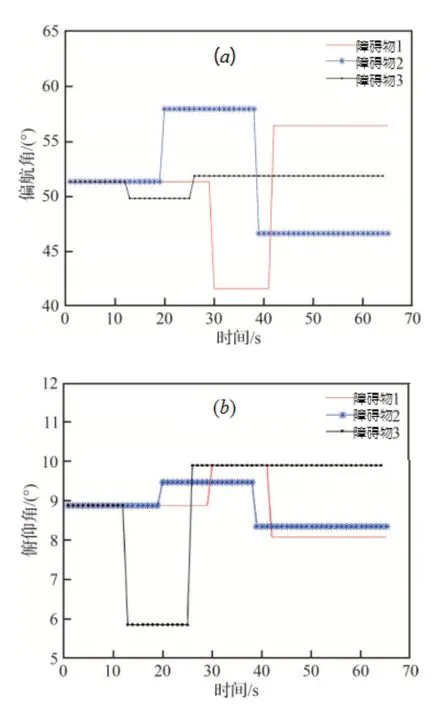
图2 无人机方向角变化
实验结果表明,虽然引入威胁距离前后的多层次视野算法在设定场景下的求解耗时都在0.008 s左右,但在引入威胁距离后的局部优化障碍中,由于无人机在保证安全距离的前提下延迟了飞行状态的调整,所以在距离机动障碍物更近的情况下才开始规避,因此在飞行冲突解脱过程中耗时更短,提高了机动障碍规避的时效性。
4 结论
本文提出了一种基于多层视野多分辨率的无人机局部路径规划算法,无人机避障视野被分为三个层次,算法根据环境复杂度情况动态确定使用的视野层次和各层的分辨率。然后进行二值化处理,得到视野各区域的通行性。接着,从候选方向中根据代价值确定备选方向,最终综合考虑各备选方向的累计选择代价来确定算法的目标行驶方向。仿真实验结果表明,本文方法有效地解决了固定活动窗方法导致的问题,具有更强的环境适应性,特别是在陷阱区域和狭窄必行通道并存的较复杂环境中相比原方法具有更明显的优势。
猜你喜欢
南北桥(2022年2期)2022-05-31
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
中国惯性技术学报(2019年6期)2019-03-04
电脑知识与技术·经验技巧(2017年9期)2018-02-24
中央民族大学学报(自然科学版)(2017年2期)2017-06-11
西南交通大学学报(2016年4期)2016-06-15
计算机技术与发展(2016年10期)2016-02-27
火控雷达技术(2016年3期)2016-02-06
浙江理工大学学报(自然科学版)(2015年10期)2015-03-01