基于负载补偿的功率分流混合动力系统模式切换性能测试方法*
2023-11-09 03:56李豪迪赵治国侯永平
汽车工程 2023年10期
李豪迪,赵治国,唐 鹏,侯永平
(同济大学汽车学院,上海 201804)
前言
面对日益严重的能源危机和环境污染,混合动力电动汽车得到了快速发展[1]。使用功率分流混合动力专用变速器(dedicated hybrid transmission,DHT)的混合动力系统作为主流技术方案已得到产业化开发与应用[2-3]。考虑到功率分流混合动力系统从纯电动向混合动力模式的切换包括发动机起动、模式切换元件动作以及动力源切换等多个瞬态过程[4-5],切换过程高、低频动力学特性复杂且控制难度大,开发高性能的模式切换协调控制策略已成为提高车辆驾驶平顺性的关键[6]。通常模式切换控制策略先基于车辆纵向动力学离线仿真模型开发,之后采用高动态性能测试台架对其进行优化、标定与验证,但由于实际测试台架与真实车辆传动轴结构、动力源以及道路负载作用方式差异,导致所开发的切换控制策略在台架测试时的适应性不足。因此,为缩短功率分流混合动力系统模式切换协调控制策略的测试时间,有必要开发一种基于真实车辆加载特性的台架仿真模型,并进行测试台架负载模拟补偿,以实现功率分流混合动力系统模式切换性能模拟与策略验证。
目前,研究人员针对电动汽车动力系统测试台架模型进行了大量研究。Liu 等[7]开发了电力驱动系统试验台模型,该模型可用于研究电驱动系统的瞬态过程控制方法。Fajri 等[8]开发了车辆电驱动系统测试台架模型,仿真结果表明该试验台模型具有较好的高速跟踪精度。Karol等[9]提出了一种开发电机负载仿真控制策略的试验台模型,可以模拟电机的线性和非线性动态,减少电机动态性能的调试时间。可见,针对电驱动系统动态性能测试建立的测试台架模型可实现良好的动态加载精度要求。然而,当测试台架的传动轴较长时,其转动惯量、阻尼等参数误差以及传动轴的扭转特性将恶化测试台架的转速闭环跟踪性能,从而降低负载模拟加载精度。因此,需要搭建包含测试台架传动轴的测试台架模型,以进一步探究其负载模拟加载特性和加载转矩补偿方法。
为提高测试台架的负载模拟精度,现有研究多通过设计基于加载装置转速闭环跟踪控制的补偿器对其加载转矩进行修正。Wang 等[10]针对双电机履带车辆测试台架模型,采用转速闭环跟踪前馈补偿控制方法对负载模拟装置加载转矩进行补偿。Fajri等[11]采用双电机测试台架验证了电动车辆等效集中惯量模型的转速闭环跟踪性能。Liu 等[12]针对混合动力系统开发了一种基于转速自适应预测控制的负载模拟方法,该方法可降低模型参数不确定性对控制精度的影响。Akpolat 等[13]针对可编程测功机控制系统,设计了一种基于负载模拟转速闭环跟踪的转速前馈补偿控制器。Gan 等[14]设计了一种基于比例积分负载模拟转速闭环控制器的转速前馈补偿器,以消除测试系统的机械特性。刘和平等[15]采用转速闭环跟踪矢量控制方法实现了纯电动汽车测试台架的转动惯量补偿。王冠峰等[16]提出了一种电驱动系统台架试验动态补偿算法,采用卡尔曼滤波来实现模型误差的精确补偿。然而,功率分流混合动力系统相较于以上动力总成,其模式切换过程的发动机和电机动态协调响应精度受负载影响较大,传统的转速闭环跟踪控制补偿器难以满足测试台架更高的加载转矩精度要求,致使模式切换过程动力源的动态特性测试准确度不高。
本文以功率分流混合动力系统性能测试台架为研究对象,提出了一种基于负载动态补偿的功率分流混合动力系统模式切换性能台架测试方法。首先,建立测试台架系统模型;其次,针对从纯电动至功率分流混合动力模式切换过程,基于Matlab/Simulink-AMEsim 平台搭建了测试台架仿真模型,并对模式切换及加载性能进行分析;之后,设计负载模拟转速闭环跟踪控制器以及补偿器;最后,对负载模拟补偿方法的有效性进行仿真和试验验证。
1 测试台架结构与动力学建模
1.1 测试台架结构
功率分流混合动力系统性能测试台架如图1 所示,主要由模拟发动机、功率分流DHT、车桥、左/右传动轴、测功机以及控制系统等组成,其中DHT 通过左/右传动轴与测功机同轴连接,左/右传动轴是通过多根传动短轴以及膜片弹簧联轴器串联形成的刚柔耦合传动长轴。功率分流DHT 由拉维娜式行星排(PGS)、MG1 与MG2 电机、B1 与B2 制动器等组成。

图1 测试台架结构
1.2 负载模拟动力学模型
测试台架需要能够模拟真实车辆行驶道路阻力矩,将负载模拟点等效至DHT 的动力输出端,模拟车辆和功率分流DHT参数如表1所示。DHT的等效输出端转矩由输出端转速和加速踏板开度查表得到,如图2所示。车辆行驶道路阻力矩为
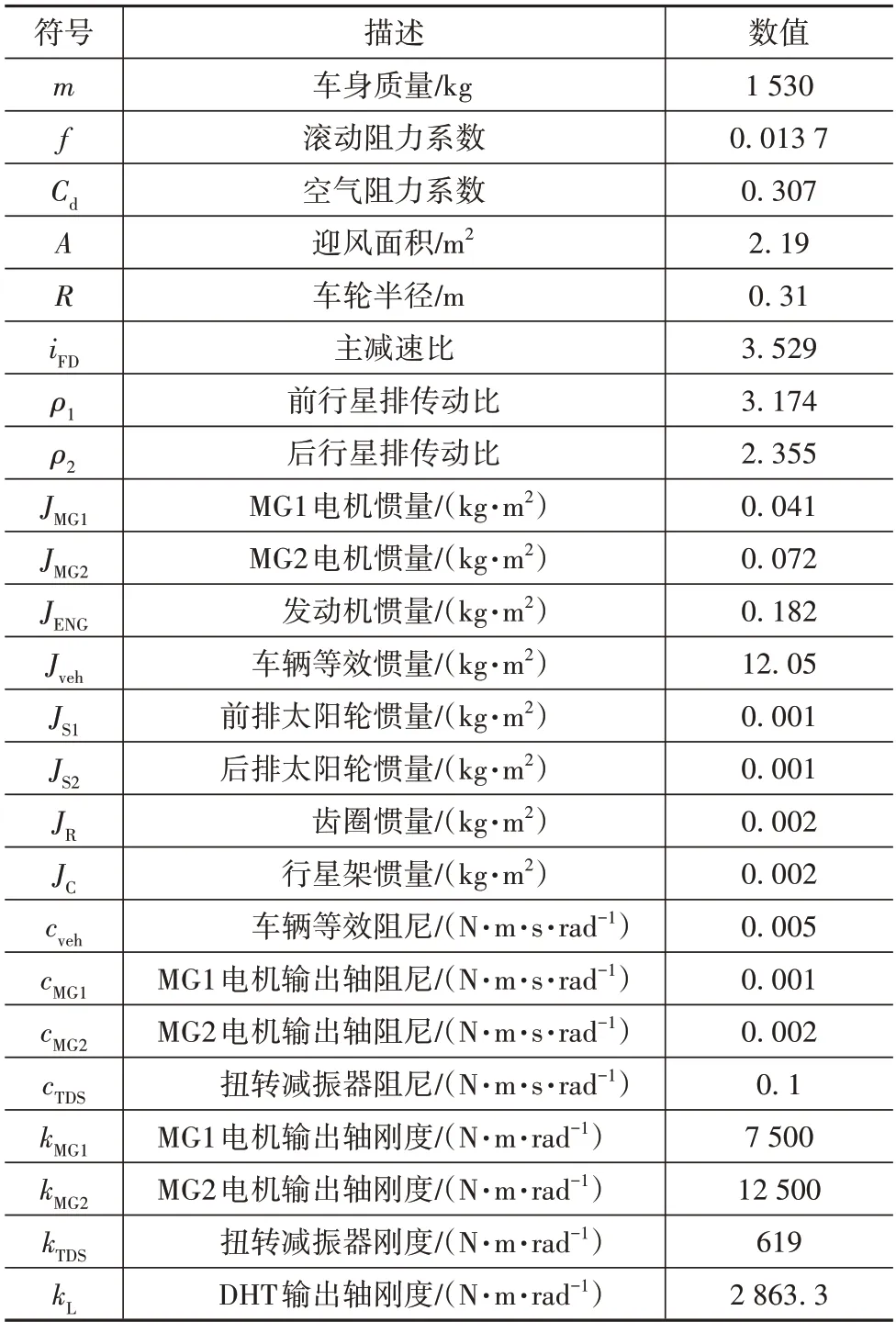
表1 模拟车辆和功率分流DHT参数

图2 DHT等效输出端转矩查表
式中:Tv为真实车辆行驶道路阻力矩;m为整车质量;g为重力加速度;f为滚动阻力系数;θ为道路坡度;CD为空气阻力系数;A为迎风面积;δ为旋转质量换算系数;vveh为车速;R为车轮半径。
加速踏板开度通过测功机转速跟踪车辆目标轮速求得:
式中:χ为加速踏板开度为比例系数为差分系数;ωveh为车轮目标角速度;ωem为测功机角速度。
车轮转速根据车辆等效转动惯量和阻尼计算得到:
式中:Tout为DHT输出端等效驱动转矩;Jveh和cveh分别为车辆的等效转动惯量和等效阻尼。
式中:Jem和cem分别为测试台架等效转动惯量和等效阻尼为测试台架加载转矩。
1.3 模拟发动机模型
不考虑发动机内部复杂的物理及化学变化过程,采用1 阶惯性环节模拟发动机驱动转矩的动态响应特性:
式中:TENG_ob为发动机实际转矩;τENG为发动机响应滞后时间;TENG为发动机目标转矩。
1.4 DHT动力系统模型
DHT 内部集成的MG1 和MG2 电机为永磁同步电机,关键参数如表2 所示,为了可模拟其输入和输出特性(如转速、转矩、电流和效率等),本文建立电机控制系统模型[7],经过坐标变换得到的电流方程为
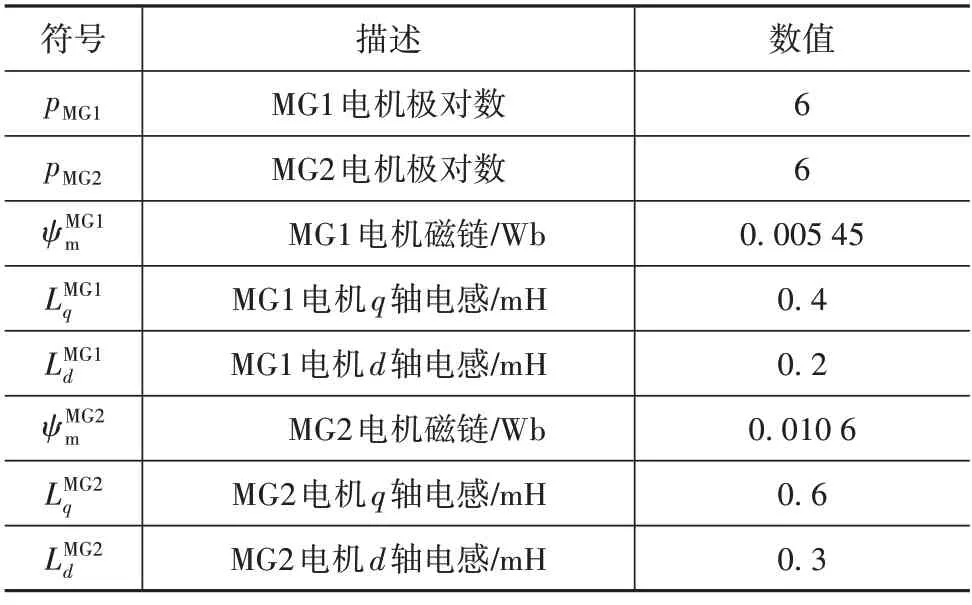
表2 电机关键参数
电机电磁转矩方程为
电机机械运动方程为
将搭载功率分流DHT 的整车传动系统等效为四弹性集中质量模型,如图3 所示。其中,S1 和S2分别为前/后排太阳轮;P为行星轮;C为行星架;R为齿圈。

图3 四弹性集中质量模型
四弹性集中质量模型的状态空间表达式为
将MG1 电机转矩TMG1、MG2 电机转矩TMG2、发动机转矩TENG和Tv作为系统输入,结合式(7)可得:
其中:
1.5 测试台架传动系统模型
将台架传动系统等效为单轴4 自由度集中质量模型[17],如图4所示。
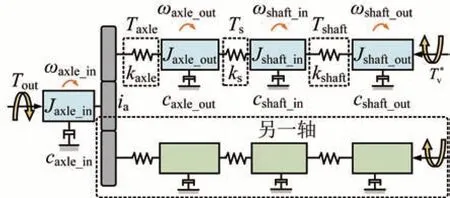
图4 测试台架传动系统模型
建立测试台架传动系统动力学微分方程:
车桥传递的弹性转矩为
车桥与刚柔耦合传动轴连接点的传递转矩为
刚柔耦合传动轴的传递转矩为
式中:J为转动惯量;ω为等效角速度;c为阻尼;k为弹性系数;ia为车桥传动比。
测试台架加载转矩为测功机的电磁转矩,其与电流的关系为
式中:Np为极对数;msr为转子磁通;Lr为转子电感;Ird和Irq为定子d-q轴电流;Isd和Isq为转子d-q轴电流。
2 模式切换台架测试性能分析
2.1 模式切换过程分析
功率分流混合动力系统的工作模式如表3所示。

表3 功率分流混合动力系统工作模式
以纯电动向功率分流模式切换为例,其协调控制流程如图5 所示。车辆起动后首先进入纯电动模式,当MG2电机需求转矩Tveh超过其最大转矩TEV_max、荷电状态SOC低于阈值SOClow或车辆速度vveh超过阈值vEV_max时,制动器B1缓慢打开,利用MG1和MG2电机保证行驶平顺性,在B1 完全断开后,电机将发动机拖转至怠速,发动机点火,进入功率分流模式,模式切换过程分为3 个阶段:纯电动模式、电机拖转发动机阶段和功率分流模式[4]。

图5 模式切换协调控制流程
2.2 模式切换过程转矩分配
2.2.1 纯电动模式
纯电动模式时,车辆仅由电机MG2 驱动,MG1的需求转矩为零,DHT 的驱动转矩用于MG2 转矩计算:
当制动器B1 滑摩时,制动转矩参与电机转矩决策:
制动器B1的制动转矩TB为
式中:n为制动器摩擦面数;μk为动摩擦因数;PB为摩擦片表面压力;ro为外径;ri为内径。
2.2.2 拖转发动机阶段
当制动器B1 完全分离时,电机既要保证车辆正常行驶,又要提供额外的转矩将发动机拖转至怠速。其中,保证车辆正常行驶的电机目标驱动转矩由DHT输出端等效驱动转矩计算得到:
另外,拖转发动机至怠速过程的额外电机转矩为
则拖转发动机阶段电机的目标转矩为
2.2.3 功率分流模式
当发动机被电机拖转到怠速时,发动机喷油,车辆切换到功率分流模式,发动机目标转矩为
电机的目标转矩为
2.3 模式切换及加载性能分析
功率分流混合动力系统模式切换性能台架测试原理如图6所示。
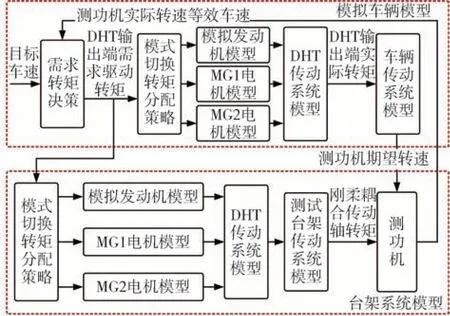
图6 台架测试原理
由图7 可以看出拖转发动机模式切换阶段各动力源的输出轴转矩拟合趋势较好,但存在动态误差,说明基于模拟车辆模型开发的模式切换控制策略虽适用于台架系统模型,但基于台架系统模型的动力源动态响应特性与模拟车辆模型一致性不佳,控制精度需进一步提升。
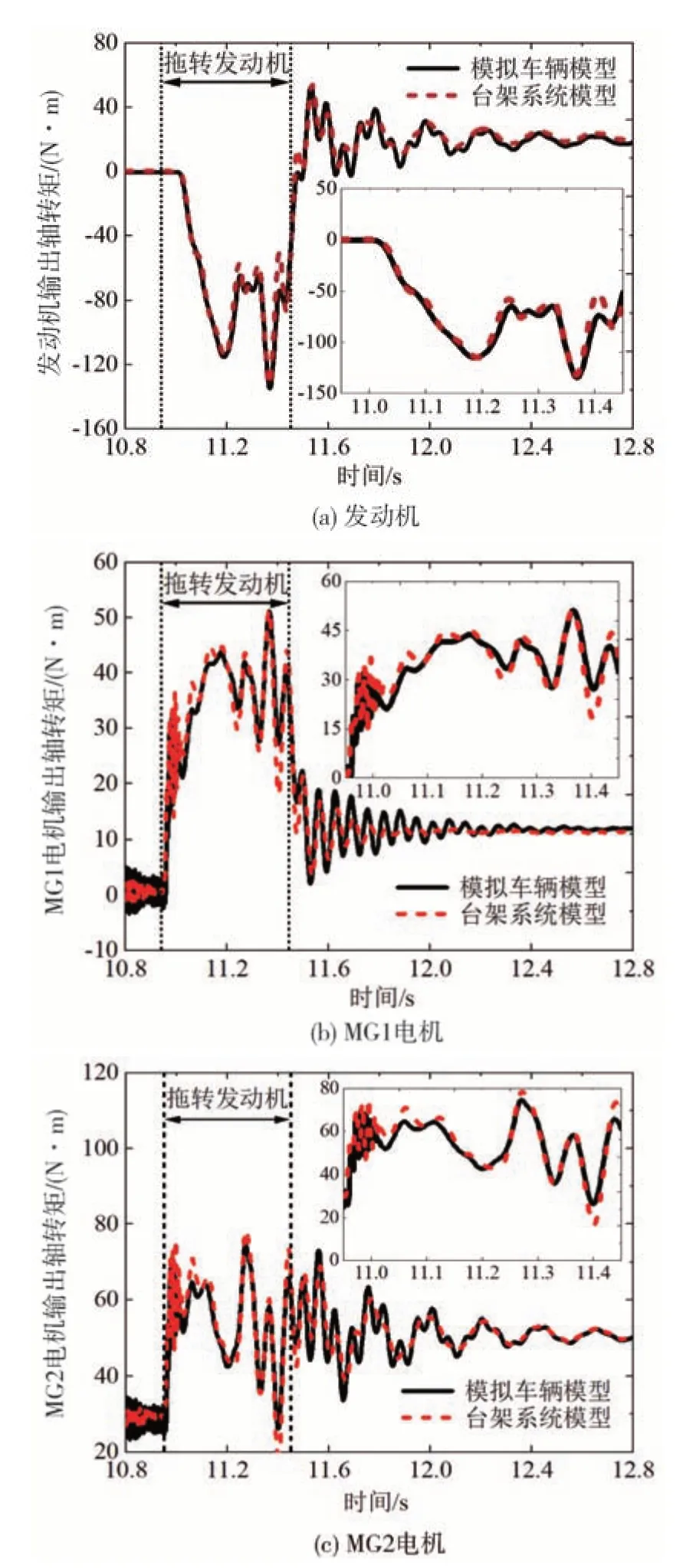
图7 动力源输出轴转矩
由图8 可以看出各动力源的转速一致性较好,表明台架系统模型对于转速的模拟是有效的。然而,出现动力源动态响应差异的原因是测试台架相较于实际车辆,其传动系统惯量及阻尼等参数存在差异,致使负载模拟加载转矩出现较大的动态误差,如图9 所示,使得测功机加载转矩不能精确地模拟出实际车辆的真实道路负载,导致控制策略的适用性差,故须对加载转矩进行补偿修正。

图8 动力源输出轴转速
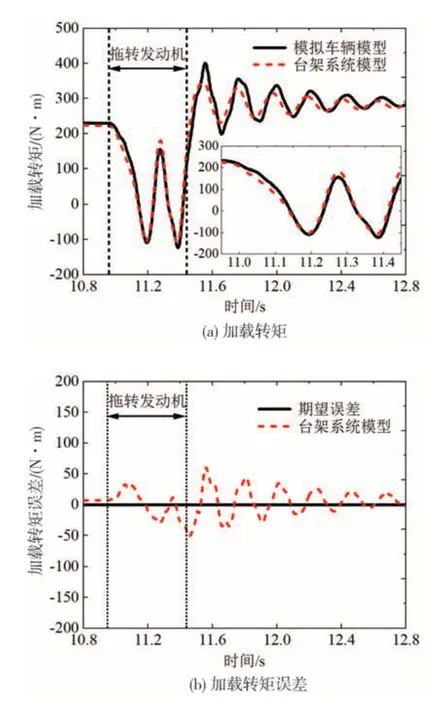
图9 加载转矩及误差
3 测试台架负载补偿
3.1 转速闭环跟踪控制器设计
转速闭环跟踪控制器可保证测功机能精确模拟目标轮速,并实现测试台架的运行稳定性,控制原理如图10所示,其传递函数关系可表示为
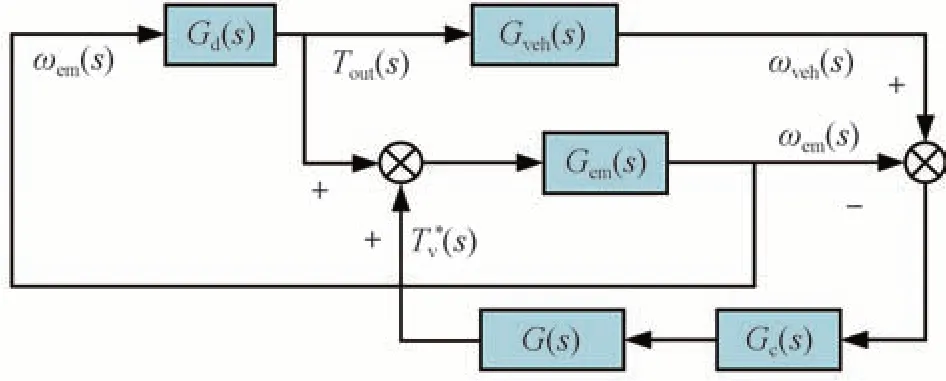
图10 转速闭环跟踪控制方法
式中:Gem(s)为测试台架传动系统传递函数;G(s)为测功机电磁转矩计算常数;Gc(s)为测功机转速-电流控制环节;Gd(s)为DHT输出端等效驱动转矩解析环节。
若使式(33)实现理想的转速跟踪性能,即ωveh(s)=ωem(s),则Gd(s)Gem(s)=1。因此结合式(2)可将Gd(s)设计为
式中KT为DHT输出端等效驱动转矩系数。
同时,结合式(4)可将式(13)等效为
测功机的转速跟踪控制采用比例-积分-差分控制器,根据DHT驱动转矩变化自适应调节电流:
因此,得到转速闭环跟踪的传递函数为
考虑Jem和cem参数的±25%扰动量,得到如图11所示的转速闭环跟踪系统幅频-相频特性对比,可以看出在一定的带宽内,参数扰动使得转速闭环跟踪控制器不可避免的存在振荡,因此,必须通过设计恰当的补偿器来抑制干扰,以提高测试台架转速闭环跟踪控制的稳定性。

图11 转速闭环跟踪系统相频-幅频特性
3.2 补偿器设计
测试台架传动系统的摩擦、对中及扭振会恶化转速闭环跟踪性能。因此,在转速闭环跟踪控制器中引入转速前馈校正补偿器Gcomp(s),从而提高其抗干扰能力。同时,设计转矩前馈校正补偿器来减小加载转矩响应滞后引起的动态误差,其原理如图12 所示。基于图10 设计的转速前馈校正补偿器为
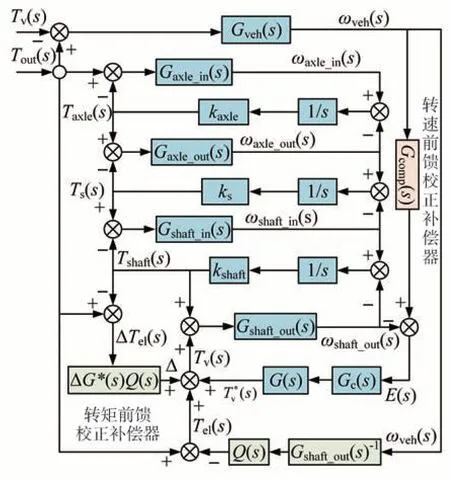
图12 负载模拟补偿控制方法
式中Gveh(s)为模拟车辆传动系统传递函数。
由于Gcomp(s)中包含有车辆逆动力学模型Gveh(s)-1,其微分环节易引起系统的不稳定,因此将前馈校正补偿器重新设计为
由式(41)可以看出该转速前馈校正补偿器,可通过调节增益使得相位滞后实现转速闭环跟踪系统稳定。通过对比两种补偿器的幅频-相频特性如图13 所示,补偿器Gd(s)Gem(s)具备抑制高频的陷波作用,可有效提高测试台架转速闭环跟踪控制器的稳定性。
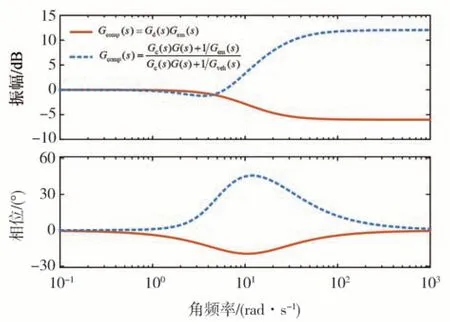
图13 补偿器幅频-相频特性对比
同时,转速闭环跟踪系统的稳定性对比如图14所示,补偿前的转速闭环跟踪特性由接近虚轴但又不十分接近零点的一对共轭主导极点S1=-0.2778+10.54i 和S2=-0.2778-10.54i 确定,转速闭环跟踪控制器的抗干扰能力差,而采用Gd(s)Gem(s)补偿器校正后产生的新增极点远离虚轴,可提高转速闭环跟踪控制器的稳定性。
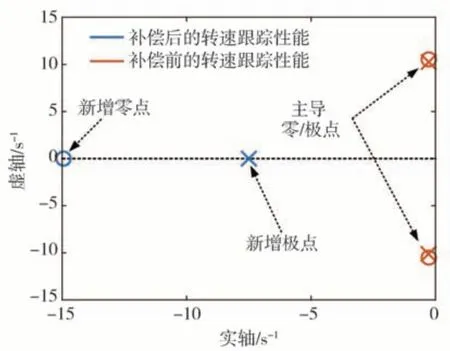
图14 转速闭环跟踪性能对比
转矩前馈校正补偿器得到的加载转矩补偿量由可测补偿量和不可测补偿量两部分组成组成。不可测部分转矩补偿量将通过模拟车辆车轮目标角速度ωveh(s)为状态输入,引入1/Gshaft_out(s)进行加载转矩观测,同时进行1 阶低通滤波Q(s)=1/(τds+1),得到加载转矩补偿量:
式中:τd为滞后时间;Tel(s)为不可测加载转矩补偿量。
结合图4可将测试台架传动系统表示为
同时,通过实时采集转矩传感器信号对可测部分加载转矩补偿量进行计算:
引入动态调节增益对可测部分加载转矩补偿量进行调节,以消除测试台架传动系统参数摄动对加载转矩精度的影响,可将其表示为
式中:Δ为可测部分补偿量;ΔG*(s)为补偿调节增益;Kf为参考补偿增益;ΔKf为动态调节增益。
因此,得到加载转矩补偿量为
根据式(3)和式(4)得到补偿后的关系式为
进而得到补偿后的测试台架负载模拟动力学关系为
4 仿真分析
采用Matlab/Simulink-AMEsim 联合仿真平台对台架系统模型的准确性和负载动态补偿方法的有效性进行验证,由于模式切换初始车速和加速踏板开度影响DHT 动力输出端驱动转矩,因此将其设置为仿真变量。
4.1 不同模式切换初始车速
当台架测功机转速等效车速分别达到25、30 和35 km/h 时,开始进行模式切换,设置加速踏板开度为20%,结果如图15~图17 所示,结果统计如表4所示。
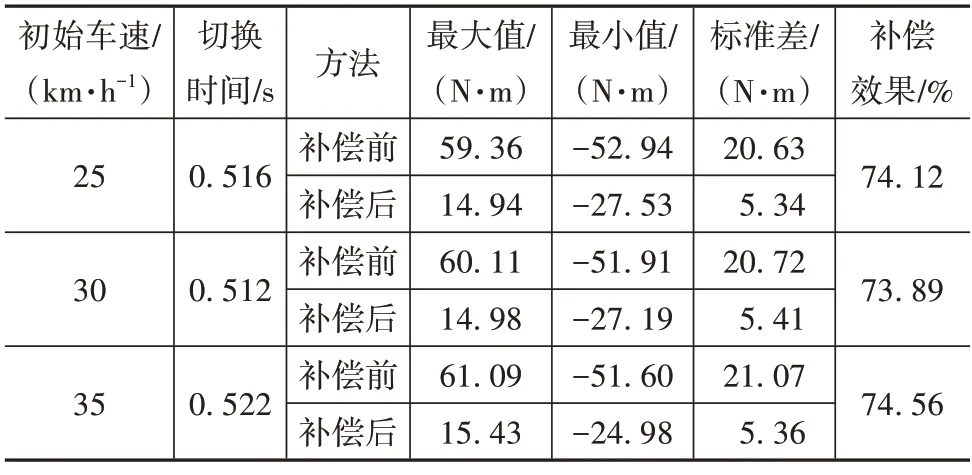
表4 不同初始车速仿真结果
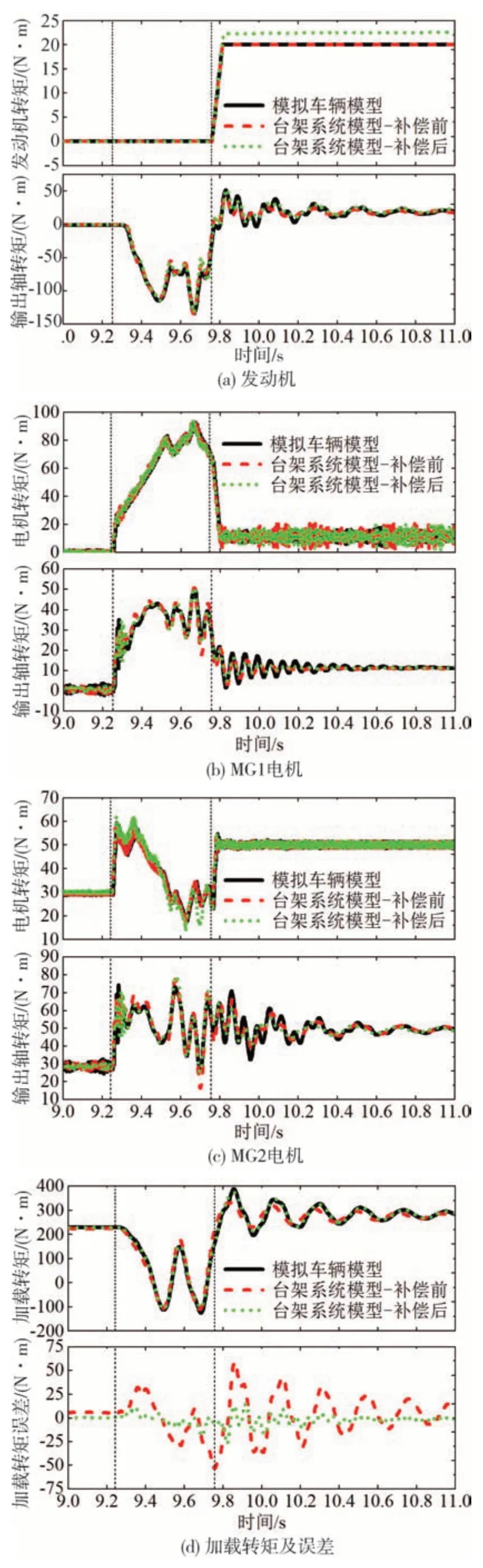
图15 初始车速25 km/h
25 km/h 时的动力源转矩和负载特性对比如图15所示,其模式切换时间为0.516 s。由图15(a)~图15(c)可以看出动力源的目标转矩补偿效果明显,并且补偿后的输出轴转矩与模拟车辆模型拟合效果好,表明了所搭建的台架系统模型的正确性,以及补偿控制算法能够有效保证动力源的动态输出特性。由图15(d)可以看出补偿后的测试台架加载转矩与模拟车辆模型的行驶阻力矩具有较好的一致性,且加载转矩误差的标准差为5.34 N·m,好于补偿前的20.63 N·m,加载转矩精度提高了74.12%。因此,在初始车速25 km/h条件下,台架系统模型具有较高的仿真精度,验证了负载模拟动态补偿控制方法的有效性。30 km/h 时的动力源转矩和负载特性对比如图16 所示,其模式切换时间为0.512 s。由图16(a)~图16(c)可以看出动力源的目标转矩补偿效果明显,同时图16(d)所示补偿前加载转矩误差最大值为60.11 N·m,最小值为-51.91 N·m,标准差为20.72 N·m;而补偿后的误差最大值为14.98 N·m,最小值为-27.19 N·m,标准差为5.41 N·m,加载转矩精度提高了73.89%。35 km/h 时的动力源转矩和负载性能对比如图17 所示,可以看出模式切换时间为0.522 s,加载转矩精度提高了74.56%。以上结果表明在不同模式切换初始车速条件影响下,本文所提出的负载模拟补偿控制算法具有鲁棒性,可提高功率分流混合动力系统模式切换性能测试的准确性。

图16 初始车速30 km/h
4.2 不同加速踏板开度
设置驾驶员加速踏板开度分别为25%、30%和35%,模式切换初始车速为20 km/h,结果如图18~图20 所示,结果统计如表5 所示。结果显示补偿后的台架系统模型动力源动态响应曲线与模拟车辆模型保持一致,与不同模式切换初始车速条件下的结果相比也具备较好的补偿控制性能,模式切换时间也较为接近。由图18(d)看出补偿后的加载转矩最大值为16.85 N·m,最小值为-22.57 N·m,标准差为5.62 N·m,相较于补偿前的17.52 N·m,加载转矩精度提高了67.74%。由图19(d)看出补偿后的加载转矩最大值为15.16 N·m,最小值为-20.34 N·m,标准差为5.05 N·m,相较于补偿前的19.55 N·m,加载转矩精度提高了71.175%。由图20(d)看出补偿后的加载转矩最大值为12.49 N·m,最小值为-23.27 N·m,标准差为5.99 N·m,相较于补偿前的14.36 N·m,加载转矩精度提高了58.29%。不同加速踏板开度条件下仿真结果进一步表明了本文所提出的基于台架系统模型的负载模拟补偿控制算法的有效性和鲁棒性。

表5 不同加速踏板开度仿真结果
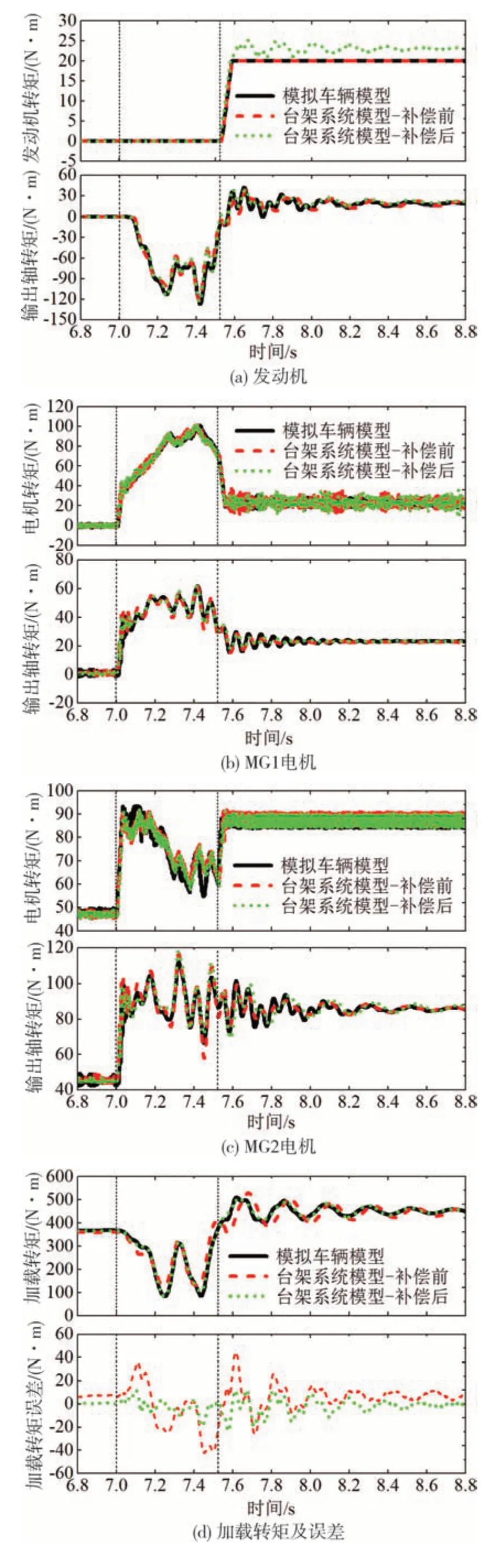
图20 加速踏板开度χ=35%
5 试验验证
5.1 试验环境
模式切换性能测试台架环境如图21 所示,主要由功率分流DHT 及其控制器、模拟发动机电机、转矩/转速传感器、左/右传动轴、车桥、测功机、供电系统、快速原型控制器和上位机等部件组成。电池模拟器通过CAN 总线实现与测功机通信交互并向混合动力系统提供直流电源,同时DHT 控制器和测功机通过CAN 总线与快速原型控制器通信,采用CANape 对测功机和DHT 进行实时监测。试验基于Matlab 软件和自动代码生成技术,以C 代码的形式下载至快速原型控制器。上位机通过标定协议与快速原型控制器通信,发送转矩等指令至试验台架并接收转速和转矩等测量值。
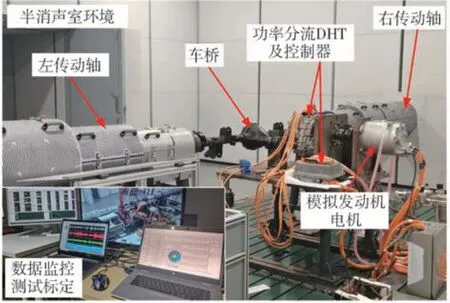
图21 实际测试台架环境
5.2 试验结果
图22为功率分流混合动力系统模式切换过程动力源实际转矩结果对比。图中MG1 和MG2 电机转矩为电机模型计算得到的电磁转矩,而试验转矩为控制器反馈的实际转矩,通过对比可以看出仿真与试验转矩的拟合效果良好,表明了模式切换控制策略在台架测试时具有良好的适应性,但由于控制器的采样频率仅为200 Hz,小于电机模型的10 000 Hz计算频率,因此,电机仿真转矩更能反映模式切换过程中电机的高频响应特性。图23为动力源实际转速结果对比,可以看出动力源转速曲线一致性较好,进一步验证了台架系统模型的准确性。
图24为测试台架负载模拟补偿方法结果对比,可以看出采用本文所提出补偿控制方法后的加载转矩误差最大值为74.27 N·m,最小值为-151.44 N·m,均值为-45.04 N·m,标准差为56.97 N·m;而补偿前的加载转矩误差最大值为247.13 N·m,最小值为-81.72 N·m,均值为114.64 N·m,标准差为84.61 N·m。通过对比标准差可以得出补偿后的加载转矩精度提高了32.67%。试验结果表明,本文所提出的负载模拟补偿算法能有效提高功率分流混合动力系统模式切换过程的测试台架加载精度。

图24 加载转矩补偿效果
6 结论
(1)建立了一种包括车辆道路负载模拟动力学、模拟发动机、功率分流DHT 以及测试台架传动系统在内的测试台架系统模型,其可对功率分流混合动力系统的模式切换过程进行分析及策略设计。
(2)基于台架系统模型设计了转速闭环跟踪控制器,同时设计了转速前馈校正补偿器以提高转速闭环跟踪的抗干扰能力,并结合转矩前馈校正补偿器减小了测试台架与实际车辆道路行驶阻力矩的动态误差。
(3)对台架系统模型以及负载模拟补偿方法进行了仿真和试验验证,结果表明,台架系统模型可准确模拟功率分流混合动力系统模式切换过程各动力源的动态性能。同时,基于台架系统模型开发的负载模拟补偿控制方法可提高加载精度32.67%以上,能够大幅提高功率分流混合动力系统模式切换性能测试以及负载模拟的准确性。
后续将基于测试台架系统模型对转矩前馈校正补偿器的动态调节增益进行优化,以进一步提高功率分流混合动力系统模式切换性能测试台架的负载模拟加载精度。
猜你喜欢
预防青少年犯罪研究(2022年1期)2022-08-15
汽车实用技术(2022年7期)2022-04-20
装备制造技术(2021年4期)2021-08-05
装备制造技术(2020年11期)2021-01-26
电子技术与软件工程(2019年21期)2020-01-16
电信科学(2017年6期)2017-07-01
黑龙江电力(2017年1期)2017-05-17
环境科技(2016年5期)2016-11-10
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
系统工程学报(2015年2期)2015-02-28