
基于SET-CNN的紧凑型地波雷达弱目标检测方法
2023-11-15 11:13李发瑞纪永刚任继红程啸宇王心玲
海洋科学进展 2023年4期
李发瑞,纪永刚,2*,任继红,程啸宇,王心玲
(1. 中国石油大学(华东) 海洋与空间信息学院,山东 青岛 266580;2. 自然资源部 海上丝路海洋资源环境组网观测技术创新中心,山东 青岛 266580)
高频地波雷达(High-Frequency Surface Wave Radar, HFSWR)利用垂直极化高频电磁波沿海面绕射的特性,可实现船只目标大范围、远距离、实时的探测(杨强等, 2000; Ji et al, 2022)。目前,用于船只目标探测的高频地波雷达大都是大型阵列系统,由于其阵列孔径巨大,雷达场地寻址困难,限制了其推广应用。而小阵列的紧凑型高频地波雷达由于天线阵列孔径小、雷达功率低、系统占地小且电磁辐射低,是用于目标检测的地波雷达技术的重要发展趋势之一。紧凑型高频地波雷达不仅可以安装在岸边和海岛(Anderson, 2013),还可以布设在船舶(Li et al, 1995)、浮标(Gill et al, 1994)等移动平台上,进一步扩展了高频地波雷达的探测范围和应用场景。
紧凑型高频地波雷达天线阵列孔径小且雷达功率低,导致船只目标的回波信号减弱;而弱目标的增多,不利于目标检测及后续的航迹跟踪。通常情况下,基于距离-多普勒(Range-Doppler, RD)谱的恒虚警检测(Constant False Alarm Rate, CFAR)方法(何友等, 1999; 梁建, 2014)及其改进方法(公维春等, 2022)主要适用于大阵列的高频地波雷达,当其应用于存在较多弱目标信号的紧凑型高频地波雷达时,会出现目标检测性能降低的情况。近年来,以同步提取变换(Synchroextracting Transform, SET)方法(Gang et al, 2017)为代表的时频分析(Time-frequency Analysis, TFA)(Auger et al, 1995; Daubechies et al, 2011)方法凭借其对非平稳信号和弱信号的良好检测效果,逐渐成为雷达目标检测研究的热点,并已应用于地波雷达目标检测(严颂华等, 2006; 胡进峰等, 2015; 刘亚春等, 2023)。在基于时频分析的目标检测中,目标脊线检测是关键步骤,通常可采用图像处理(Cai et al, 2021)、贪婪算法(Yang et al, 2022)等方法来实现;但当目标时频脊线受到杂波或其他强回波影响时,会出现脊线形变及断裂等问题,影响了基于时频分析的目标检测效果。目前,如卷积神经网络(Convolutional Neural Network, CNN)等神经网络深度学习方法凭借其良好的特征提取功能以及泛化能力(Ren et al, 2017),已被成功应用于地波雷达目标检测(Wu et al, 2021a; 2021b)。而且,深度学习方法也适合于就时频分析得到的具有不同形状特征的时频脊线分类来实现目标检测,如Wang等(2022)提出了一种基于深度学习与时频分析相结合的船载地波雷达海杂波内目标检测方法,其研究思路是通过判别海杂波形状来检测有无目标的存在,重点关注海杂波内目标检测,没有考虑杂波外及杂波附近的目标检测。
本文针对由于紧凑型高频地波雷达弱目标信号增多导致的目标检测性能降低的问题,综合时频分析方法和深度学习方法,提出了一种基于同步提取变换-卷积神经网络(SET-CNN)的紧凑型地波雷达弱目标检测方法。文中第一部分给出了SET-CNN方法的流程和各部分步骤,第二部分通过仿真数据和实测数据验证了SET-CNN的目标检测效果。
1 同步提取变换-卷积神经网络方法
结合地波雷达目标检测的需求,给出了基于SET-CNN的紧凑型地波雷达弱目标检测方法的处理流程,如图1所示。方法共分4个步骤:第一步,基于地波雷达时域数据,完成基于SET方法的时频分析处理,获得地波雷达时频谱数据,其中各类信号表现为不同形状的时频脊线;第二步,根据时频谱中脊线的不同形状特征建立数据库,主要包含受强回波影响的目标、未受强回波影响的目标和背景噪声三类信号;第三步,搭建脊线提取和分类的CNN网络结构,并使用构建的数据库完成训练;第四步,通过对分类结果进行后处理,完成船只目标检测。

图1 SET-CNN方法流程Fig. 1 Flow diagram of SET-CNN method
1.1 基于SET的时频分析处理
时频分析处理的主要目的是得到适合于地波雷达目标检测的时频谱。SET时频处理是在短时傅里叶变换(Short-time Fourier Transform, STFT)的基础上进行后处理得到的,它通过抑制非中频区域的能量分量提高时频谱分辨率。SET方法的时频Te(t,w)表示可定义为:
式中:t为时间;w为频率;Ge(t,w)为STFT方法的时频表示;δ(·)为克罗内克函数;δ(w−w0(t,w))表示同步提取算子(Synchronous Extraction Operator, SEO),w0为纯谐波信号模型sh=A·eiw0t的频率,即中频区域。SET方法的时频表示通常也可写作:
从式(2)可以看出,SET只从中频轨迹w=w0中提取时频谱分量Ge(t,w),而将其余的时频谱分量去除。
在基于SET的地波雷达时频谱中,杂波时频脊线和目标时频脊线通常具有相似的形状特征,这往往会导致出现误检现象。因此,为减少杂波信号对于目标信号的影响,本文引入了可以有效抑制海杂波的信噪比方法(纪永刚等, 2015)。在使用信噪比方法过程中,需要选取合适的信号窗和噪声窗,具体过程为:左右两侧一阶谱区信号窗中心位置aL、aR分 别预设为和,其中,g为重力加速度,λ为雷达波长(单位为MHz),表示海浪朝向雷达,则表示海浪远离雷达(梅晓东等, 2014),fc代表海流造成的多普勒频率偏移,此处设置为0.02 Hz;左侧一阶谱区信号窗SL选取为右侧一阶谱区信号窗SR选取为[aR−∆f,a[R+∆f],∆f为一阶]谱能量扩散影响范围,为保[证合理性,此处]设置为0.01 Hz;左侧噪声窗NL选取为aL−k∆f,aL+k∆f−SL,右侧噪声窗NR选取为aR−k∆f,aR+k∆f−SR,k为噪声窗与信号窗的宽度比,k的大小对一阶谱边界的确定影响较小,因此,本文中k选择0.5,使噪声窗与信号窗大小相同,则信噪比为:
令aL、aR、∆f在限定的取值范围中做循环,估计其最大信噪比,最大信噪比情况下的aL、aR分别为左右一阶谱区的中心位置,∆f为一阶谱宽度。
设杂波抑制后的背景噪声区域为N(t,w),则结合杂波抑制的SET为:
式(4)也可以写为:
为保证目标回波能够在检测时间内持续存在,截取时间长度为3000个采样周期的地波雷达时域数据,其中采样周期(T)为0.128 s,选择滑窗大小为469个采样周期即t=469T,即t=60 s。同时,为更好地说明海杂波区域划分效果,给出其中间过程STFT的时频谱(图2a),并将海杂波区域划分结果在基于SET的时频谱上展示(图2b),可见海杂波时频脊线成功位于杂波区域划分结果中。
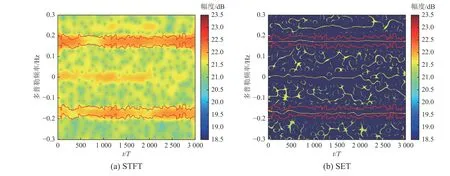
图2 基于信噪比方法的海杂波区域划定效果Fig. 2 The extracted sea clutter regions by signal-to-noise ratio method
另外,考虑到在SET处理后的时频谱上,大部分目标时频脊线占据一个多普勒单元格,而较弱的目标可能占据多个多普勒单元格,为后续数据库构建增加了困难。因此,需要对时频脊线进行细化处理,使每条时频脊线在多普勒维度只占据一个单元,以确保相同类型的目标样本具有一致的脊线特征。其中,细化处理采用的方法是抑制中频区域w0处的非极值分量。
1.2 时频脊线数据库构建
时频脊线数据库是基于上一步骤中的SET处理结果进行构建的,样本分为3类(图3):第一类是未受强回波影响的目标,其特点是由于该目标具有平稳的信号输入,表现为一条较为平滑的曲线(图3a);第二类是受强回波影响的目标,具有独特的形状特征,表现为圆弧状的曲线(图3b);第三类是背景噪声,具有混沌特性,表现为不规则的曲线(图3c)。

图3 不同形状特征的目标时频脊线和背景噪声时频脊线Fig. 3 Morphological characteristics of target and noise time-frequency ridges
在本文中,基于包含3类样本的实测数据进行数据库构建,数据库包含1000个未受强回波影响的目标实例,1000个受强回波影响的目标实例,1000个背景噪声实例。为保证样本大小的合理性,在样本窗口大小选取方面应保证每个样本中只存在一个目标时频脊线,因此,样本的时间维度窗口大小选择200个采样周期单元,多普勒维度窗口大小选择20个单元。
此外,相对于未受强回波影响的目标和背景噪声,受强回波影响的目标的时频脊线具有较特殊的形状特征,且还未有相关研究。为进一步验证这一类信号的形状特征,除给出实测个例外,还进行了受强回波影响的目标的时频分析处理(图4),结果表明,7 m/s处的时频脊线为受强回波影响的目标,可以看出仿真结果与实测数据基本一致。
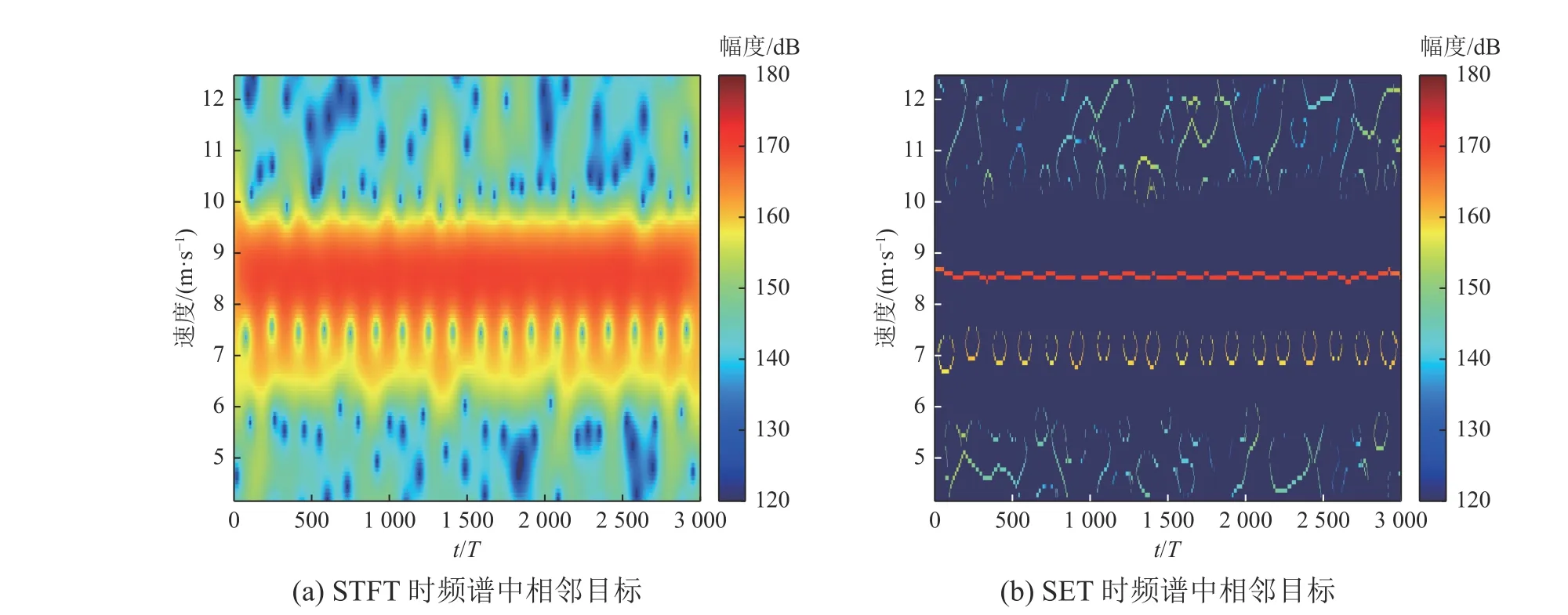
图4 时频分析中相邻目标示意图Fig. 4 Schematic diagram of adjacent targets in time-frequency analysis
1.3 基于CNN的脊线提取和分类
在脊线提取过程中,由于CNN对图像形状特征较为敏感,能够提供更好的脊线分类效果。同时考虑到输入特征的尺寸较小,且为了减少卷积层和池化层数目,本文选择CNN中的AlexNet网络(Krizhevsky et al, 2012)结构,对时频谱样本进行分类。搭建的基于CNN的脊线提取网络结构图如图5所示。

图5 基于CNN的脊线提取网络结构Fig. 5 Network structure of ridge extraction by CNN method
在网络的最后一层,使用了常用来解决样本多分类问题的Softmax函数:
式中:x为输出向量;j为当前需要计算的类别;xi为x中第i个节点的输出值;n为神经网络的输出类别个数。则分类目标损失函数为:
在构建好网络结构后,使用1.2节中的数据库进行训练、测试,其中,训练集和测试集的划分比例为7∶3。在训练70轮后,模型的测试正确率为82.4%,损失函数值随着迭代次数的增加而降低(图6),可满足目标时频脊线分类的需求。
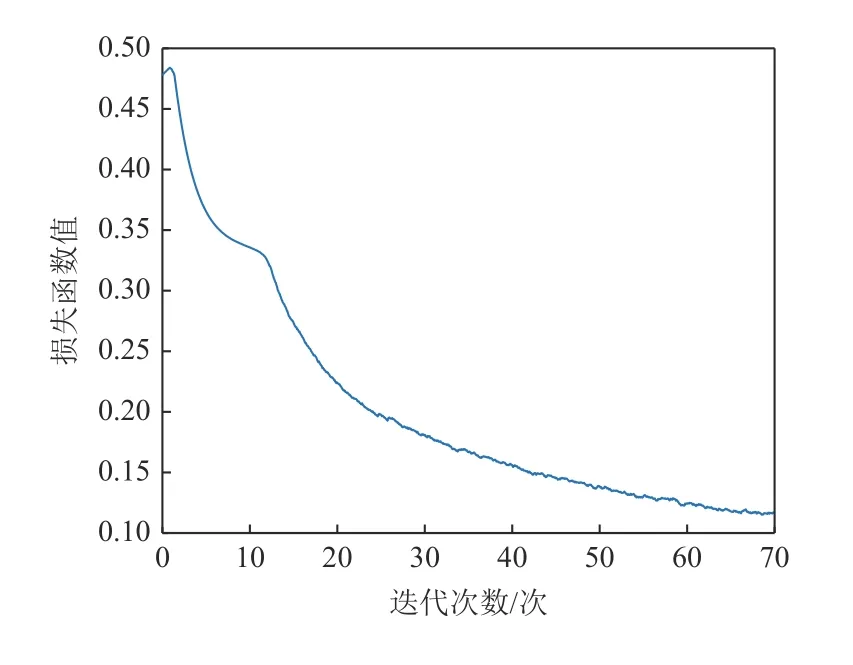
图6 多次迭代下的损失函数Fig. 6 Loss function under multiple iterations
为了验证搭建的CNN网络的正确性,分别利用CNN、径向基函数(Radial Basis Function,RBF)神经网络和人工神经网络(Artificial Neural Network, ANN)提取时频脊线。其中,输入了841个时频脊线样本,CNN可以正确分类712个,而RBF、ANN的正确分类数量分别为629个和596个,可以看出,本文选择的深度学习方法对时频脊线分类具有明显优势,详细的分类正确率对比如表1所示。
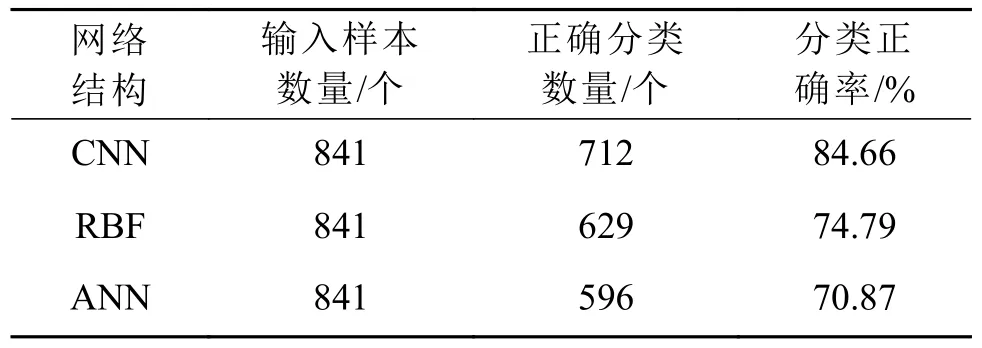
表1 CNN与RBF、ANN的分类正确率对比Table 1 Comparison of classification accuracy between CNN with RBF and ANN
1.4 基于分类结果的后处理
基于分类结果的后处理详细过程为:首先,确定存在目标的多普勒速度范围;然后,精确船只目标的唯一速度值。针对目标可能存在的多普勒速度范围,我们通常认为当某一多普勒速度范围处未受强回波影响的目标样本数量超过阈值N1,或受强回波影响的目标样本数量超过阈值N2时,便可认为该速度处存在目标。由于远距离的目标回波会受到更多的传播衰减和散射,回波能量通常较小,容易受背景噪声影响,因此需要根据实际情况来调整阈值。阈值N1、N2具体定义如下:
式中:k1、k2∈[−1,1];R为目标所处距离单元;Tinit1为未受强回波影响的目标初始阈值;Tinit2为受强回波影响的目标初始阈值。
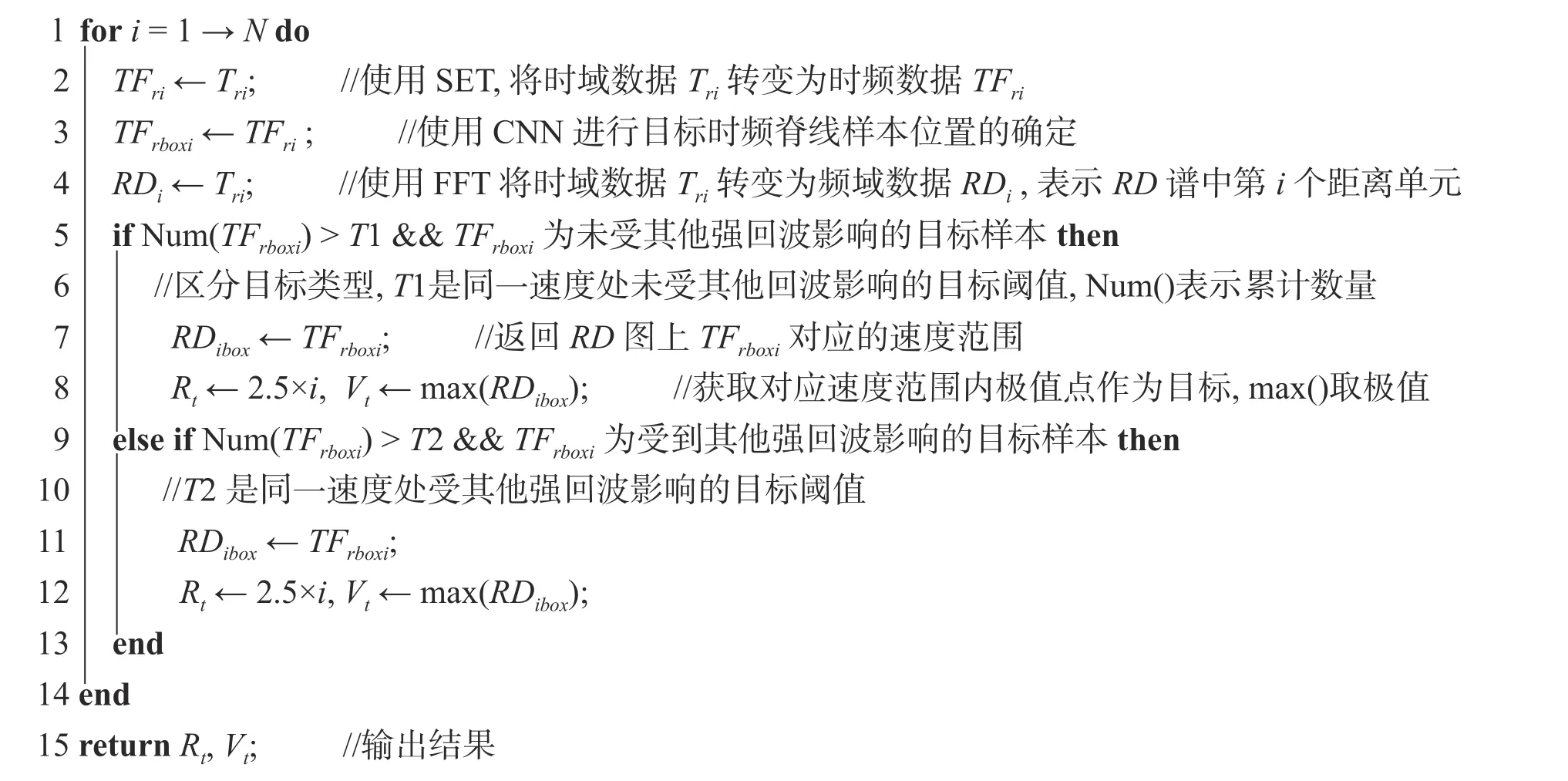
此时,CNN检测出的目标速度是样本对应的面区域速度,为了更好地定位目标位置,需要进一步确定船只目标的唯一速度。对于在相同相干积累时间快速傅里叶变换下的RD谱,样本对应区域表现为某一距离处的连续速度面区域。当某一面区域对应的时频谱中,目标样本数量超过阈值时,检测出此面区域的极值点,极值点速度便是目标的唯一速度。为更好地说明本文提出的目标检测方法流程,本文提供了SET-CNN方法的伪代码:
输入
按距离划分的地波雷达时域数据集Tri={Tr1,Tr2,...,TrN},表示第i个距离单元的时域数据,其中i={1,2,3,...,N},距离分辨率为2.5 km。
输出
目标距离,速度{Rt,Vt}
2 方法验证
2.1 基于仿真数据的方法验证
为了验证本文方法的目标检测能力,分析了未受强回波影响和受强回波影响的弱目标特性,进行了仿真与基于本文方法的检测,结果分别如图7和图8所示(下文中将保留了CNN脊线样本框的检测结果和仅保留目标信息的结果分别简称为检测结果和保留结果)。在仿真过程中,使用了与实际紧凑型地波雷达硬件系统相同的配置参数:雷达频率为4.7 MHz,带宽为60 kHz,扫频周期为0.128 s,两类目标的SNR均为8 dB。仿真过程中选取的SET-CNN方法参数为:时域数据选取长度为384 s,时频分析滑窗的窗口长度为60 s,未受强回波影响的目标初始阈值Tinit1为14,受强回波影响的目标初始阈值Tinit2为12,k1和k2均为−1。
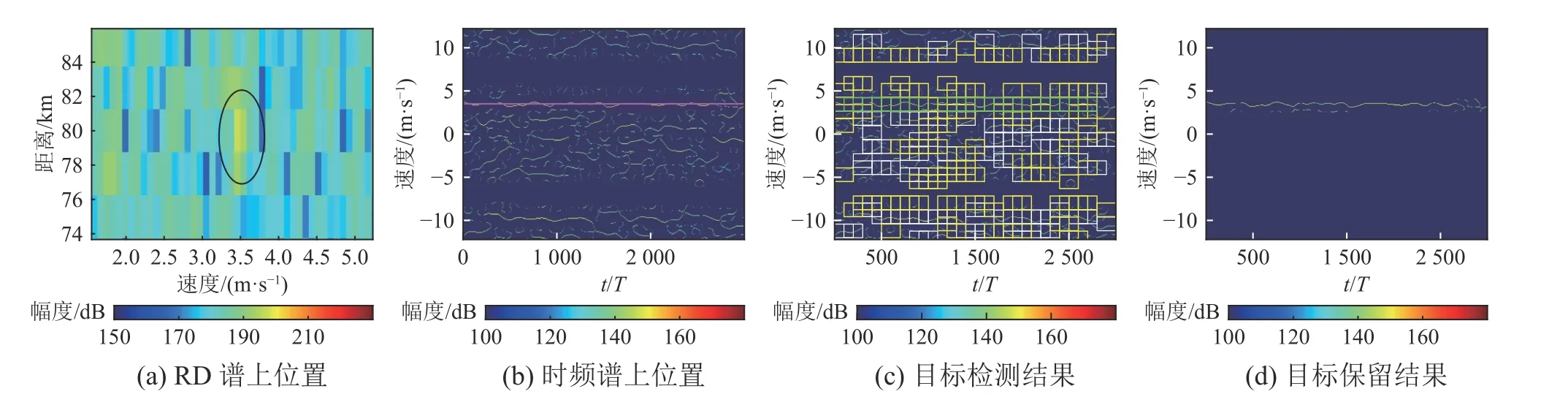
图7 未受强回波影响的弱目标的仿真与检测结果Fig. 7 The simulation and detection results for weak targets unaffected by strong echoes
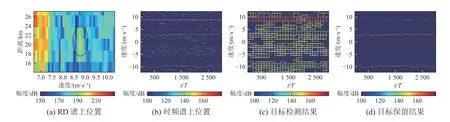
图8 受强回波影响的弱目标的仿真与检测结果Fig. 8 The simulation and detection results for weak targets affected by strong echoes
由图7c和图7d可知,未受强回波影响的弱目标由于能量较弱,容易受背景噪声影响,时频脊线表现为一条弯曲的连续线段。而从图8中可以看出,受强回波影响的弱目标时频脊线表现为圆弧状的非连续时频脊线。此时,基于本文方法的时频脊线检测结果与图7b、图8b的仿真弱目标位置一致,可知,本文方法可以准确实现对两类弱目标的检测。
考虑到目标会处于不同的背景噪声环境中,故分析不同信噪比情况下的方法检测性能。两类目标在信噪比SNR为−20、−10、0和10 dB的仿真结果,以及基于本文方法的检测结果如图9所示,其中,未受强回波影响的目标速度为3.5 m/s,而受强回波影响的目标速度为5 m/s。从图9a和图9e中可以看出,在SNR=−20 dB的情况下,较弱的目标被遮蔽,难以形成独立的时频脊线,此时本文方法只能检测出能量较强的目标时频脊线;而当SNR≥−10 dB时,两类目标在时频谱上均可形成独立的时频脊线,此时本文方法可以实现两类目标时频脊线的有效检测。
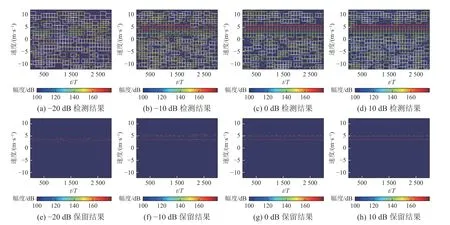
图9 提出方法对不同信噪比下仿真目标的检测效果Fig. 9 The detection effect of the proposed method on simulated targets under different SNR
2.2 基于实测数据的方法验证
实测验证数据来自2021年7月在青岛周边海域开展的紧凑型地波雷达海上实验,高频雷达系统配置参数和目标检测方法中所需参数与仿真参数一致。为评价方法的检测性能,采用同步获取的船舶自动识别系统(Automatic Identification System, AIS)数据作为真实船只目标数据。
基于本文方法、CA-CFAR方法和贪婪算法在RD谱上的检测结果(图10),对3种方法进行比较分析。对于大部分具有较高SNR(≥10 dB)的目标,如图中目标1、目标2和目标3,3种方法均可实现有效检测;对于SNR<10 dB的弱目标,本文方法漏检较少,而CA-CFAR方法却难以实现有效的检测,例如图中目标4,此时目标点能量较弱,且周围参考单元能量与目标点能量接近,导致依赖能量幅值的CA-CFAR方法出现了漏检现象。另外,贪婪算法虽然可以实现大部分弱目标的有效检测,但却出现了较高的误检率,相比于贪婪算法,本文方法可以有效减少误检目标的个数。
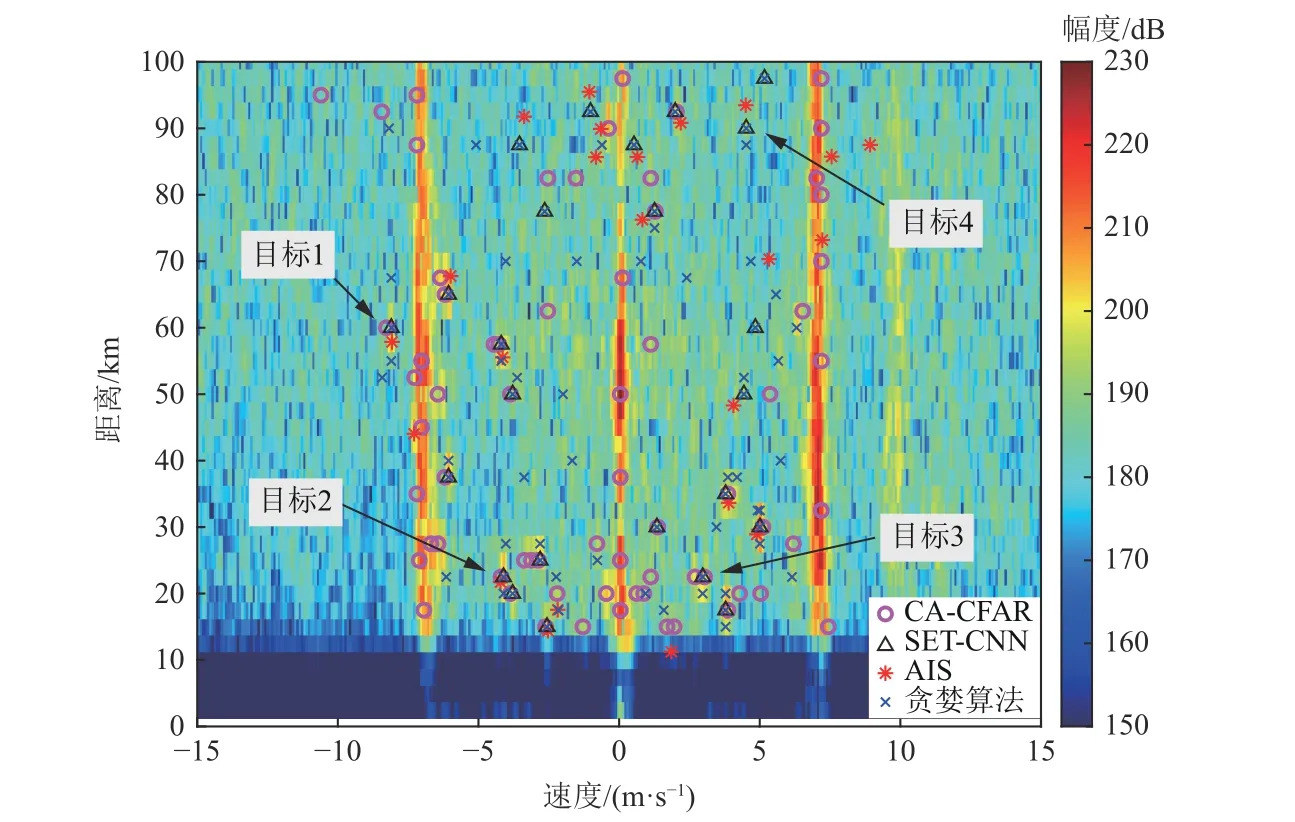
图10 RD谱不同方法的检测结果对比Fig. 10 Comparison of the detection effect of different methods in RD spectrum
为进一步分析本文方法的检测效果,给出了实测目标个例的脊线检测和保留结果,结果如图11所示,其中目标2与目标3处在同一距离单元处,经过SET时频处理后,两者位于同一张时频谱中。同时,为了说明本文方法对弱目标的检测能力,给出了本文方法对目标4的时频脊线检测和保留结果(图12)。
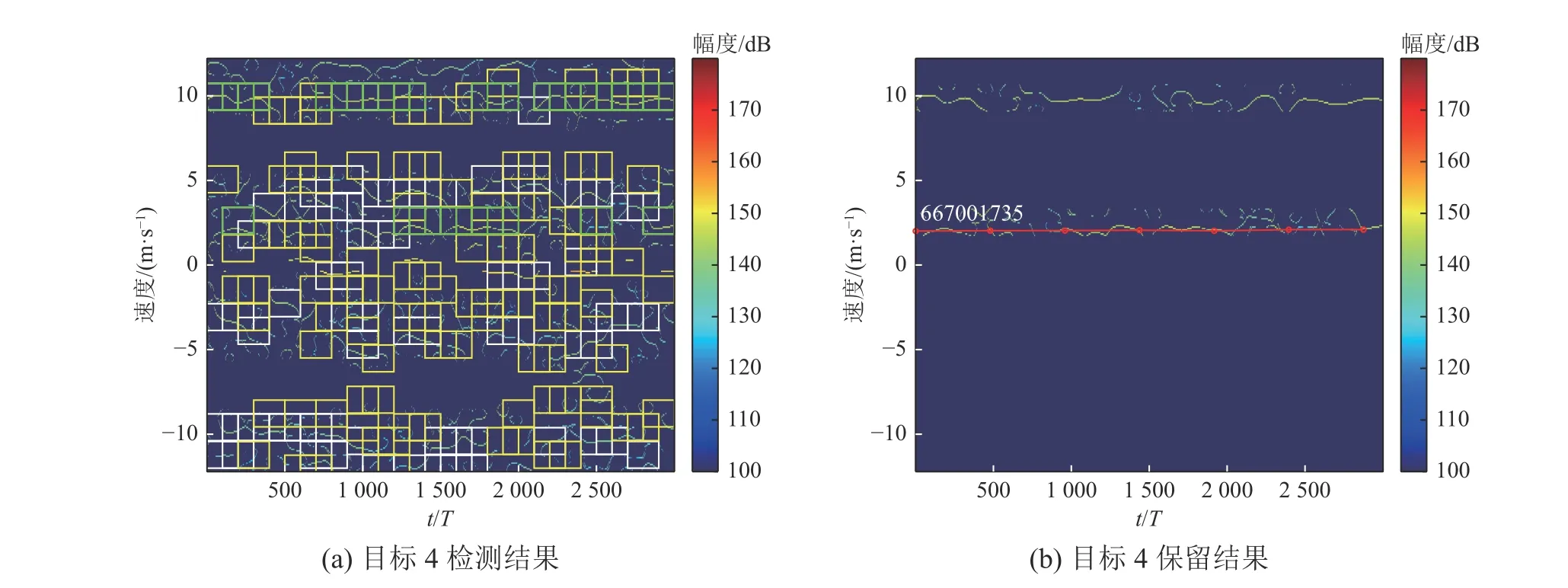
图12 提出方法对实测弱目标的检测效果Fig. 12 Detection effect of the proposed method on real measured weak targets
从图12b中可以看出,2 m/s处MMSI为“667001735”的AIS数据对应的弱目标,由于受到周围强噪声影响,其时频脊线呈现出形变、断裂的形状特征,但本文方法仍可以准确检测其位置,也进一步验证了本文方法对弱目标的检测能力。此外,从保留结果中可以发现10 m/s处总是存在一条时频脊线被误检为目标,结合RD谱分析可知,这是由射频干扰影响造成的。
在实测数据的基础上,为进一步说明本文方法适合于紧凑型地波雷达目标检测,进行了本文方法与其他2种方法的检测率(Probability of Detection, PD)和误检率(False Alarm Rate, FAR)(Li et al, 2021)对比(分辨率为1%)。从对比结果中(表2)看出,CA-CFAR方法表现出较低的误检率,但检测率低于其他2种方法;贪婪算法凭借其对弱目标的良好检测效果,拥有较高的检测率,但这是以牺牲误检率为代价的,会导致过多的虚假检测;本文方法在拥有几乎与贪婪算法相同的检测率下,误检率仍能保持在一个较低的水平,从而实现对大部分目标的有效检测。
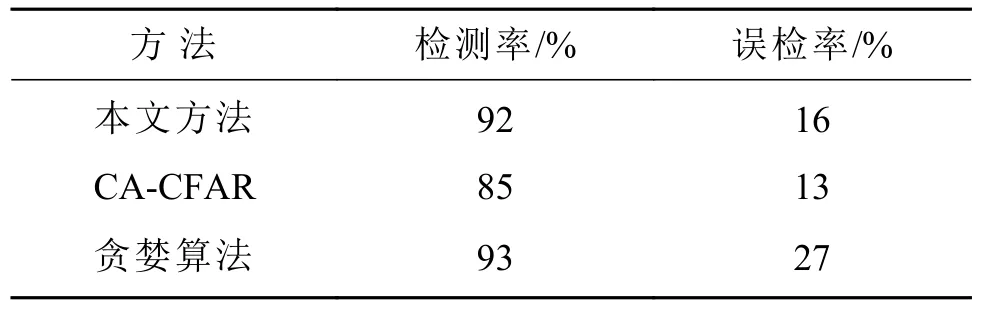
表2 不同目标检测方法的性能对比Table 2 Performance comparison of different target detection methods
3 结语
针对紧凑型地波雷达弱目标难以检测的问题,本文提出了一种基于SET-CNN的紧凑型地波雷达弱目标检测方法。首先,通过使用SET方法获得了地波雷达回波信号的时频谱,并根据时频脊线形状特征完成数据库的构建,其中样本分为三类,分别为:呈平滑直线状的未受强回波影响的目标、呈圆弧状的受强回波影响的目标和呈不规则曲线状的背景噪声。然后,搭建适合于时频脊线样本分类的CNN的网络结构并进行训练,得到时频脊线分类模型。最后,利用该模型得到分类结果,并经过后处理实现目标检测。结合仿真与实测数据,证明了本文提出的目标检测方法可有效提高紧凑型地波雷达目标检测的能力,尤其针对弱目标,具有更好的检测性能。
猜你喜欢
科学与信息化(2021年30期)2021-12-24
西北工业大学学报(2015年3期)2015-12-14
遥测遥控(2015年2期)2015-04-23
舰船科学技术(2015年8期)2015-02-27
地理与地理信息科学(2015年6期)2015-02-10
电测与仪表(2014年17期)2014-04-04
振动、测试与诊断(2014年6期)2014-03-01
现代防御技术(2014年6期)2014-02-28
太原城市职业技术学院学报(2014年9期)2014-02-27
中国测试(2013年3期)2013-07-12
