火星次表层探测雷达展开机构设计与试验
2023-11-18 05:24黎彪张从发盛聪樊俊峰刘冬
中国空间科学技术 2023年5期
黎彪,张从发,盛聪,樊俊峰,刘冬
北京空间飞行器总体设计部,北京 100094
1 引言
次表层探测雷达能获取火星土壤层、沉积层和冰层等地质结构的科学数据,对研究火星生命生存的条件和环境信息具有重要的意义[1-2]。中国“天问一号”次表层探测雷达由两根5m和两根4.5m天线组成[3-4],由于探测器上可布置雷达的空间有限,要求单套天线的收拢包络不能超过0.4m×0.2m×0.2m,在轨的温度环境恶劣,因此,次表层探测雷达的关键技术之一是天线展开机构的研制[5-6]。
国外典型的火星次表层探测任务包括2003年欧空局发射的火星快车(Mars Express)和2005年美国NASA发射的火星勘测轨道器(Mars Reconnaissance Orbiter,MRO)[7]。火星快车上次表层探测雷达MARSIS由两根20m长和一根7m长的天线组成,其三根天线均采用“碳纤维管+大变形复合材料铰链(foldable flattenable tubes,FFT)”连接而成,其中20m长天线通过12个大变形复合材料铰链将13段碳纤维管连接而成[8-9]。MARSIS展开机构具有非常轻的质量,但运动自由度达到了13,展开时序不唯一。且展开锁定的冲击力矩导致复合材料铰链存在到位后再次收拢的风险,以上问题导致了MARSIS在轨展开多次推迟[10-11]。火星勘测轨道器的浅表层探测雷达(SHAllow RADar PayLoad,SHARAD)由两根5m长的天线组成[12],2根天线均由4根碳纤维管通过3组铰链铰接而成,其收拢体积为1.4m×0.2m×0.15m。SHARAD采用了涡卷簧驱动的金属铰链,并通过绳索联动装置实现了不同碳纤维管的运动联动,其方案简单可靠,但收拢体积大,无法实现“一星四套载荷”的布局。
本文针对“天问一号”次表层探测雷达展开机构的收拢包络小的难题,提出一种具有大收纳比的新型雷达展开机构,分析此机构方案的优缺点,对展开机构的性能进行分析和测试,以期促进此类天线展开机构在国内航天任务中的应用。
2 次表层探测雷达展开机构方案设计
卷筒式伸杆机构(spiral tube and actuator for controlled extension and retraction,STACER)是一种线性展开机构,其具有小收拢包络、大展开长度等优点,因此被选定为次表层探测雷达的展开机构。
2.1 卷筒式伸杆机构的组成和工作原理
卷筒式伸杆机构的组成如图1所示,主要由弹性卷筒、辅助展开组件、顶杆组件、储藏罐和压紧释放装置组成[13-14]。
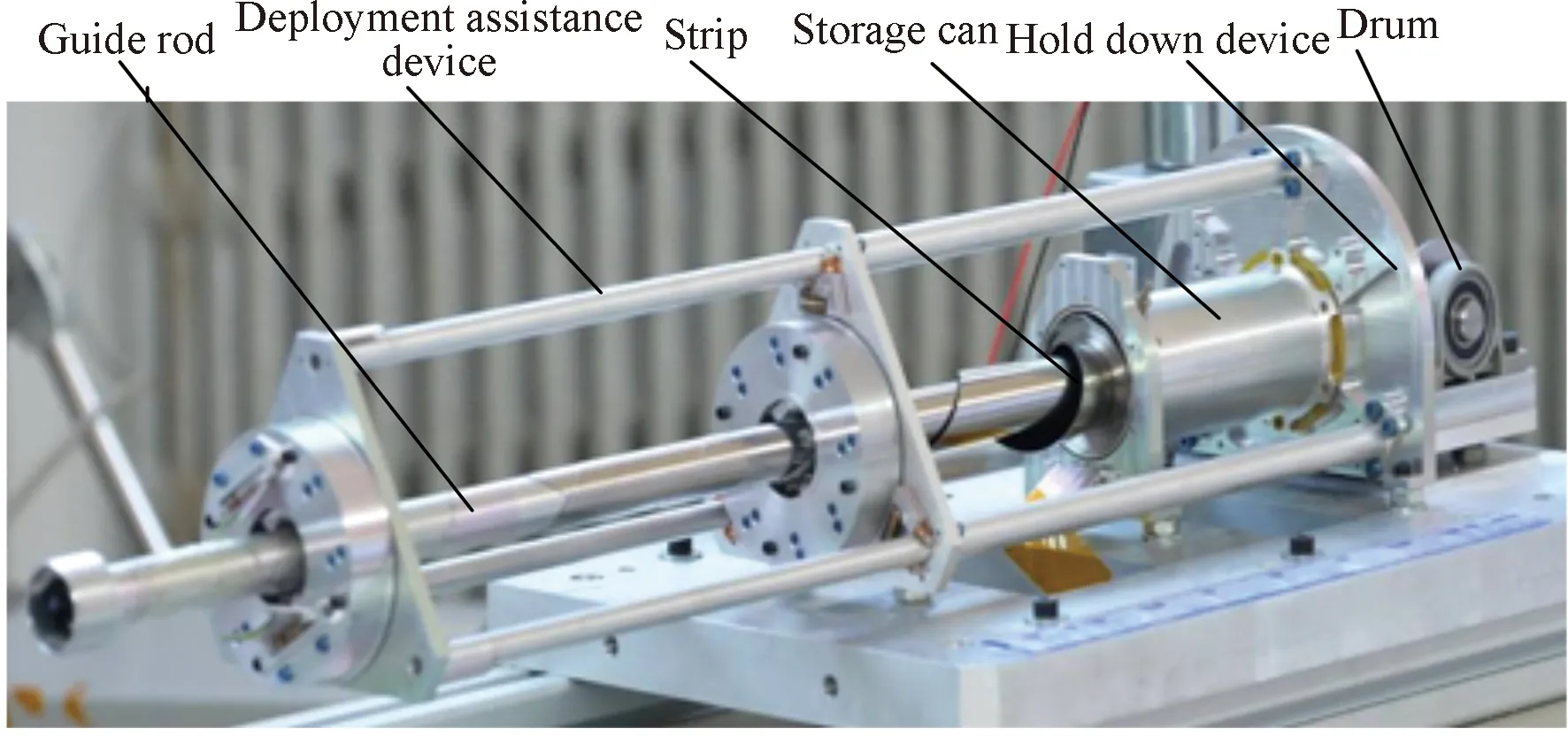
图1 卷筒式伸杆机构组成Fig.1 Composition of the STACER
其中,弹性卷筒是由金属薄带缠绕加工而成,其具有等直径、等螺旋角的加工特性,在外力的作用下,弹性卷筒能够有序层叠,可收拢在机架的储藏罐组件中。顶杆组件为中空的金属管件,其与弹性卷筒通过铆钉连接,在弹性卷筒初始展开时起导向作用。顶杆的末端固定有凯夫拉绳索,绳索穿过引金属管件内腔后,绳索另一端固定在线缆绕筒中的绕线轮上,收拢状态下,其余绳索整齐缠绕在绕线轮上。启动展开组件由三组相同的套筒机构并列组成,每组套筒机构中安装有圆柱弹簧,可以在弹性卷筒的展开初期提供额外的驱动力,以保证初始几圈弹性带材能够顺利从收拢状态变化至展开状态。
收拢状态时,弹性卷筒被压缩收拢在储藏罐中,此时弹性卷筒具有较大的应变能,机构由压紧释放装置提供压紧的约束。根据指令解除约束后,启动展开组件促进弹性卷筒展开,启动展开组件展开到位后,弹性卷筒继续驱动顶杆向前运动,直至弹性卷筒展开至设计长度。展开过程中,卷筒式伸杆机构的运动简图如图2所示。
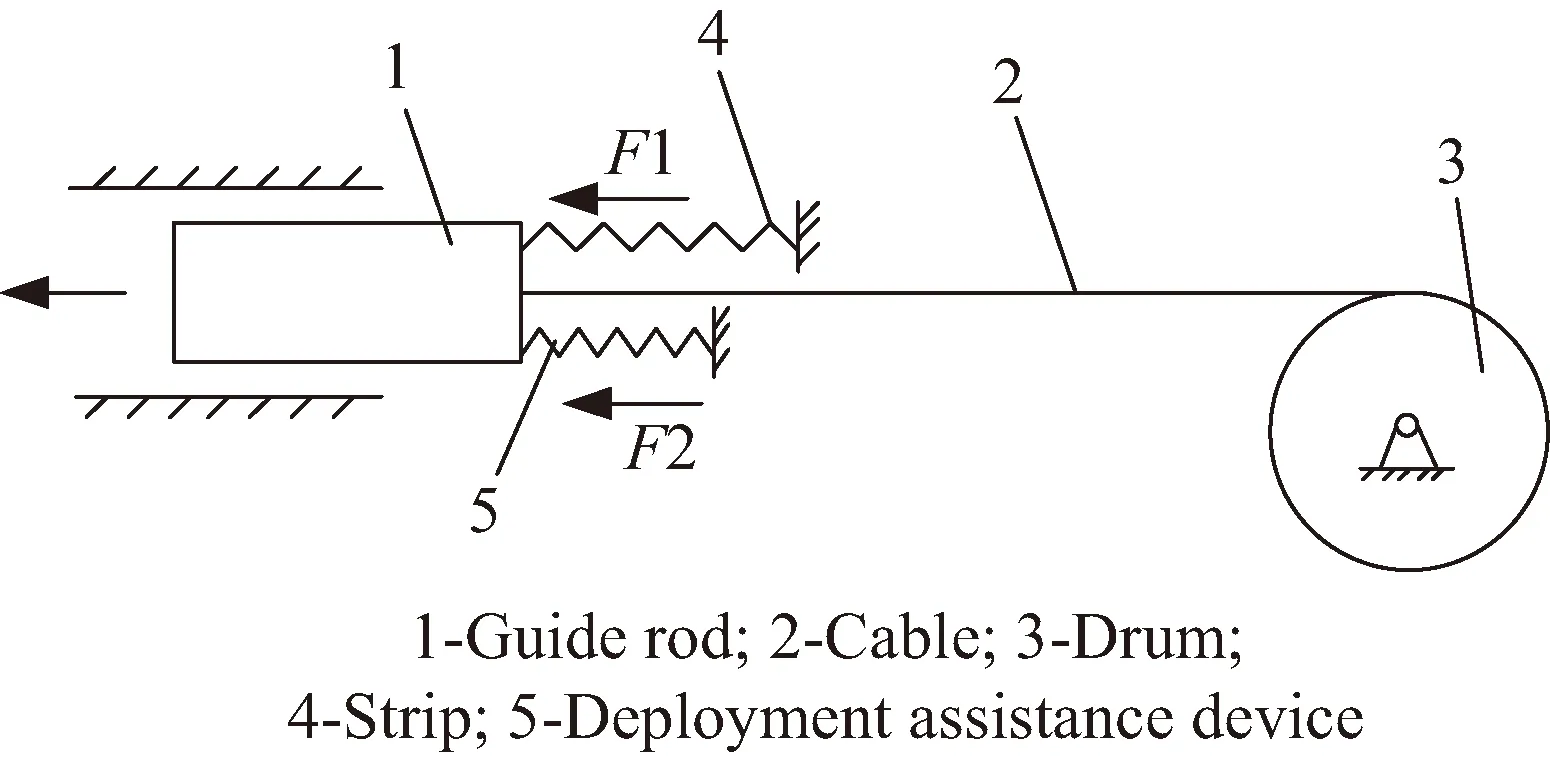
图2 卷筒式伸杆机构运动简图Fig.2 Kinematic sketch of STACER
由图2可知,压紧释放装置起爆解除了顶杆的约束后,在弹性势能作用下,弹性卷筒和启动展开组件分别提供驱动力F1和F2;在驱动力F1和F2的作用下顶杆开始展开,带动固定在顶杆上的绳索运动,绳索运动将带动绕线轮旋转,启动展开组件展开到位后,顶杆仅在弹性卷筒的弹性势能下展开,直至绕线轮上绳索完全释放,卷筒式伸杆机构展开到位。
2.2 弹性卷筒的工作原理
卷筒式伸杆机构的核心部件为弹性卷筒。弹性卷筒展开过程的工作原理示意如图3所示。
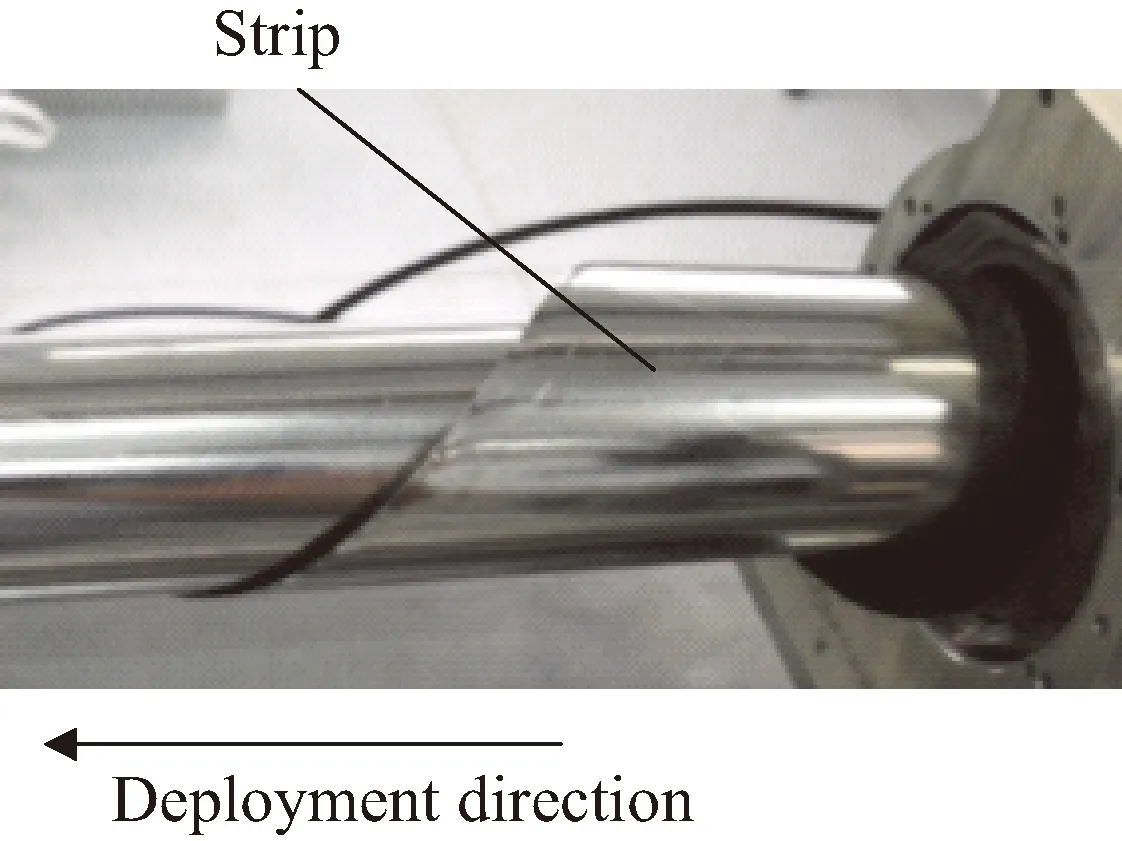
图3 弹性卷筒展开工作原理Fig.3 Working principle for deployment of the STACER
弹性卷筒自然状态为展开状态,因此弹性卷筒需要在外力作用下克服其弹性能,从而收拢在储藏内。收拢后通过压紧释放装置进行约束,一旦解除约束,在弹性卷筒中的弹性能作用下,弹性卷筒将逐层伸展,释放的首层包裹在顶杆上,释放的后一层包裹在前一层上,通过顶杆直径略大于弹性卷筒加工直径的设计,保证弹性卷筒层间存在径向作用力,从而在摩擦力和构型的双重约束下保证弹性卷筒的整体刚度。
2.3 不同展开机构比对
不同次表层探测雷达用展开机构比对如表1所示。

表1 展开机构对比Table 1 Comparison among three deploy mechanisms
由表1可知:
1)为满足次表层探测雷达天线的大尺寸要求,三个探测器上的天线均采用多段天线拼接的方案,减小了单根天线的展开长度,从而降低了展开机构的研制难度。
2)次表层探测雷达天线展开机构均采用弹性势能释放的无源驱动方式作为动力源,既可以减轻质量,又具有很高的温度适应性,以应对深空超低温环境。
3)MARSIS采用的大变形复合材料铰链具有最小的线密度(总质量与长度的比值)。SHARAD采用涡卷簧铰链,技术成熟、成本低廉、可靠性高。“天问一号”的卷筒式伸杆机构的展收比最大。
4)MARSIS的机构自由度为13,展开过程存在较大随机性,而SHARAD和“天问一号”采用的机构均为单自由度,展开可控。
3 展开机构关键参数设计
次表层探测雷达展开机构的关键性能包括展开能力和展开后的稳定性能力,展开能力可通过驱动力表征,稳定性能力与展开后的刚度相关,可用展开后的基频表示,这两者均由弹性卷筒的构型参数决定。
3.1 弹性卷筒的构型参数
弹性卷筒展开状态为含有一定螺旋角带材组成的类金属薄壁管,其构型参数见图4。其中L为弹性卷筒的展开长度。

图4 弹性卷筒的构型参数Fig.4 Mechanical parameters on stiffness of STACER
由图4可知,构型参数包括:弹性卷筒半径R、弹性卷筒加工螺旋角α,带宽w和带材厚度t。
3.2 卷筒式伸杆机构的基频计算
根据弹性卷筒的试验研究结果可知,弹性卷筒展开状态为近似等螺距的螺旋管,p为任意圈螺旋线的螺距,见图5。
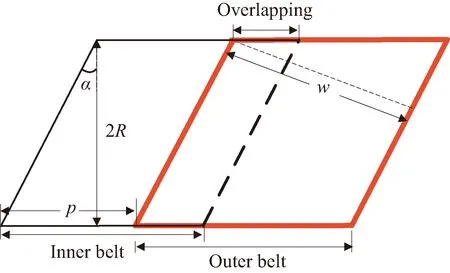
图5 相邻两层弹性卷筒的重叠关系Fig.5 Overlap between adjacent belt
由图5可知,螺距p与相关构型参数之间的关系为
p=2πR·tanα
(1)
根据等螺距的假设,可计算带材的总长度及圆锥螺旋线的总长h为

(2)
式中:R0为根部半径;Rt为末端半径;α0为根部螺旋角;αt为末端螺旋角;δ为相邻两层圆锥薄带平均半径的差值。
则弹性卷筒加工使用的带材质量m0为
m0=ρ·hwt
(3)
式中:ρ为弹性卷筒带材的密度。
将弹性卷筒等效为连续体,根据瑞利商[15],可获得弹性卷筒的圆频率ω为
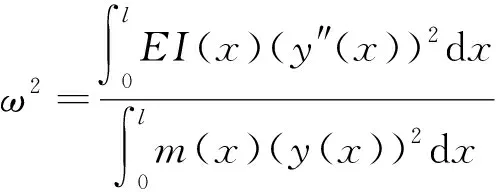
(4)
式中:E为带材的弹性模量;m(x)为任意处微元的质量;I(x)为弹性卷筒任意处微元的惯性矩;y(x)为振型试函数,可采用惯性力作用下的变形形状,表示为

(5)
联合式(1)~(5),可采用数值分析的方法计算得到弹性卷筒的基频。
3.3 卷筒式伸杆机构的驱动力计算
卷筒式伸杆机构经过过渡段后,由完全收拢状态变化为完全展开状态,因此,对弹性卷筒的驱动力研究需重点关注过渡段。
采用半物理仿真的方法,通过对弹性卷筒过渡段的形状进行测量,可知弹性卷筒过渡段中,金属薄带形状如图6所示。

图6 过渡段中带材的形状Fig.6 Strip shape in transition section
基于试验研究和理论分析,构造出带材的可能变形函数空间;随后根据主应变给出带材的变形能;最后,依据最小势能原理以及变分方法,可获取金属薄带的驱动力规律[16]。弹性卷筒在展开过程中的驱动力F与构型参数的关系为
[cos2(0.484β-0.688)-
cos2(1.484β-0.688)cosβ]2+
[sin2(0.484β-0.688)-
sin2(1.484β-0.688)cosβ]2}
(6)
式中:r为过渡段结束处对应的半径,近似等于Rt;μ为泊松比;β为展开处的螺旋角。
由式(6)可知,驱动力与带材的弹性模量、带宽成正比,可根据式(6)对展开驱动力进行数值计算。
3.4 卷筒式伸杆机构性能预计
展开机构中弹性卷筒的构型参数如表2所示。
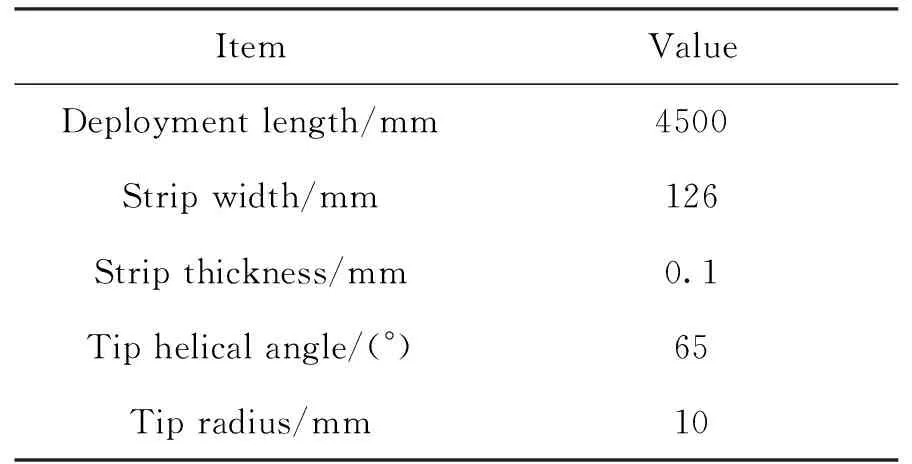
表2 弹性卷筒的构型参数Table 2 Configuration variables of STACER
根据式(1)~(6),采用数值分析可计算天线展开机构的性能参数如表3所示。

表3 卷筒式伸杆机构的性能Table 3 Performance of STACER
4 基频和驱动力测试
4.1 基频测试
采用位移激励法进行了卷筒式伸杆机构展开状态基频的测试,测试原理见图7。

图7 展开状态基频测试Fig.7 Frequency test of deployed STACER
测试过程中,卷筒式伸杆机构处于竖直向上展开状态,在顶杆组件顶端悬挂了气球以抵消重力的影响,测试过程中,对顶杆组件顶端施加横向的推力,使顶杆组件偏离平衡位置后释放,随后系统在弹性势能作用下自由振动。在此过程中采用激光测振仪获取系统的基频。卷筒式伸杆机构基频测试结果为0.885Hz,分析结果为0.83Hz,误差为6.2%。
4.2 驱动力测试
设计了专用驱动力测试工装,以获取卷筒式伸杆机构展开过程的驱动力,测试过程如图8所示。
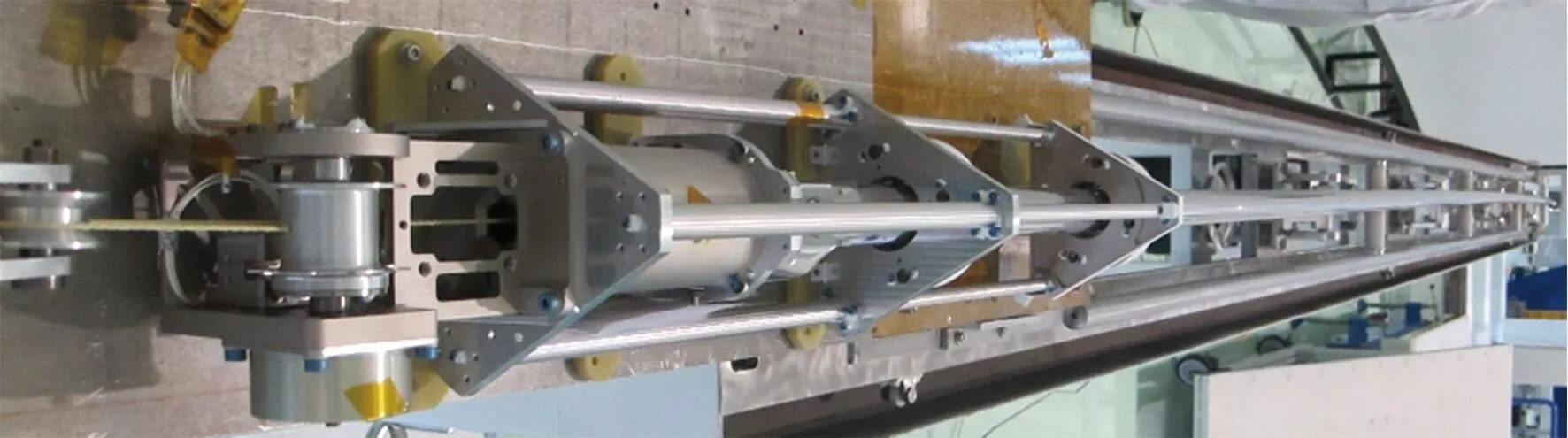
图8 卷筒式伸杆机构驱动力测试Fig.8 Force test of STACER
将卷筒式伸杆机构放置在工装上展开,展开过程中通过控制机构控制其展开速度,使其近似匀速展开,展开过程中通过拉力传感器实时采集绳索上的拉力,即为卷筒式伸杆机构的驱动力。驱动力实测结果如图9所示。

图9 驱动力随长度变化曲线Fig.9 Driving force of STACER
由图9可知,在展开初始阶段(0~0.25m),驱动力迅速由79.5N下降到23N左右,并且近似线性减小。其原因是初始阶段驱动力由启动展开组件和弹性卷筒一起提供,其中启动展开装置中的弹簧力最大值约为55N。
天线展开机构展开到0.25m后,启动展开装置已经展开到位,不再提供弹簧力对机构进行驱动。此后驱动力均由弹性卷筒提供,由图9可知在此阶段驱动力由23N下降到18N,可知驱动力预计值(表3)与测试结果基本一致。
5 结论
本文给出了火星次表层探测雷达展开机构的工作原理,对展开机构的基频和驱动力开展了测试,将测试结果与分析结果进行比对,验证了分析结果的正确性。可得到如下结论:
1)卷筒式伸杆机构是一种基于金属变形的自驱动线性展开机构,具有轻质、大展收比、展开长度长、收拢体积小等优点,能解决天问一号中小收拢体积、大展开长度的难题,在需要多载荷的科学探测场合具有广泛的应用前景。
2)天线展开机构的一阶频率和驱动力由弹性卷筒的带宽、带厚、末端半径和螺旋角决定。卷筒式伸杆机构的一阶频率实测值为0.885Hz,分析值为0.83Hz,误差为6.2%,验证了基频分析方法的正确性,该分析方法可应用于其他类似产品。
3)弹性卷筒的驱动力由金属薄带的弹性模量、带厚、带宽、过渡段结束处的半径和螺旋角决定,实测卷筒式伸杆机构的驱动力在18N-23N之间,与分析值接近。
猜你喜欢
中国钢铁业(2022年8期)2022-12-21
中国钢铁业(2022年7期)2022-12-21
中国钢铁业(2022年6期)2022-09-03
中国钢铁业(2022年4期)2022-07-06
中国特种设备安全(2021年5期)2021-11-06
模具技术(2021年5期)2021-10-13
重型机械(2020年2期)2020-07-24
锻造与冲压(2020年13期)2020-07-09
新疆钢铁(2016年1期)2016-08-03
船海工程(2015年4期)2016-01-05