
紧急路况下智能网联车辆队列控制策略设计及仿真分析
2023-12-08 12:14刘颖妮
成都工业学院学报 2023年6期
刘颖妮
(安徽汽车职业技术学院 机电工程系,合肥 230000)
智能网联车辆队列相对于单车具有行车安全性高、燃油经济性好、道路通行效率和运输能力大大提升等优点。洪金龙等[1]对智能网联车辆节能优化关键问题进行了综述,指出智能化信息的有效应用能够充分挖掘车辆的节能潜力,同时从软件和硬件2个层面分析了未来的研究思路。胡明伟等[2]对智能网联车辆混行交通流效益进行研究,对比了不同时间段和不同渗透率情况下的交通效益,指出智能网联车辆市场渗透率的增加使得混行交通流的平均车速增加,出行效率提高,尤其是对高峰和平峰期的交通效益提升更为显著。闫茂德等[3]针对智能网联汽车在强制换道路况下通行效率低、舒适性差、燃油经济性差等问题,提出基于多目标优化的智能网联汽车队列换道方法,设计并验证了基于滑模控制的智能网联汽车队列跟踪控制算法。同时,对智能网联汽车变车距队列控制进行研究,将开源软件Plexe作为基础设计了面向智能网联汽车队列控制的可视化仿真平台,能够有效实现对已有车辆队列变车距控制算法的实景仿真验证[4]。前人的研究主要是集中在节能性、稳定性等方面,对紧急路况下智能网联车辆队列控制的研究较少。相对而言,紧急路况是非常危险的。如果控制策略不科学,势必造成重大的人员伤亡和经济损失。基于此,设计紧急制动、他车插入并长时间停留、他车插入并快速驶离3种紧急路况下的控制策略,并借助PreScan平台进行仿真分析,验证其有效性。这对确保智能网联车辆队列的安全行驶具有一定的现实意义。
1 控制系统架构
车辆队列控制系统采用功能明确、结构清晰的分层系统架构。在此基础上,智能网联车辆队列控制系统依旧采用分层架构,如图1所示[5]。

图1 智能网联车辆队列控制系统架构
由图1可知,智能网联车辆队列控制系统包含2层,即策略层、控制层。由雷达、摄像头等传感器信息以及车对车信息交换(Vehicle to Vehicle,V2V)通信,结合网联车辆队列所处路况来科学选择车辆纵向、横向控制器,从而对智能网联车辆队列实施控制[6]。策略层包含3种路况,分别为非紧急制动路况、紧急制动路况、他车插入队列路况,同时对于不同的路况有对应的路况切换策略。
智能网联车辆队列控制包括纵向控制和横向控制,其中协同自适应巡航控制(Cooperative Adaptive Cruise Control, CACC)、自适应巡航控制(Adaptive Cruise Control, ACC)、自动紧急制动(Autonomous Emergency Braking, AEB)、队列紧急制动(Platoon Emergency Braking, PEB)、车间距调整(Gap Adjustment, GA)5个控制器对车辆纵向进行控制,车道居中控制(Lane Centering Control, LCC)对车辆横向进行控制。控制层接收来自于决策层的决策,将选择的控制器激活,从而实现对车辆的控制。
智能网联车辆队列紧急制动与他车插入队列是非常危险的紧急路况,其控制策略直接关系到行车安全。采取科学有效的控制策略对紧急路况下智能网联车辆队列进行控制,从而更好地消除安全隐患,解决高速公路上智能网联车辆队伍的安全、稳定控制问题。
2 控制策略设计
2.1 紧急制动路况
智能网联车辆队列行驶过程中,队列紧急制动路况场景示意如图2所示[7]。
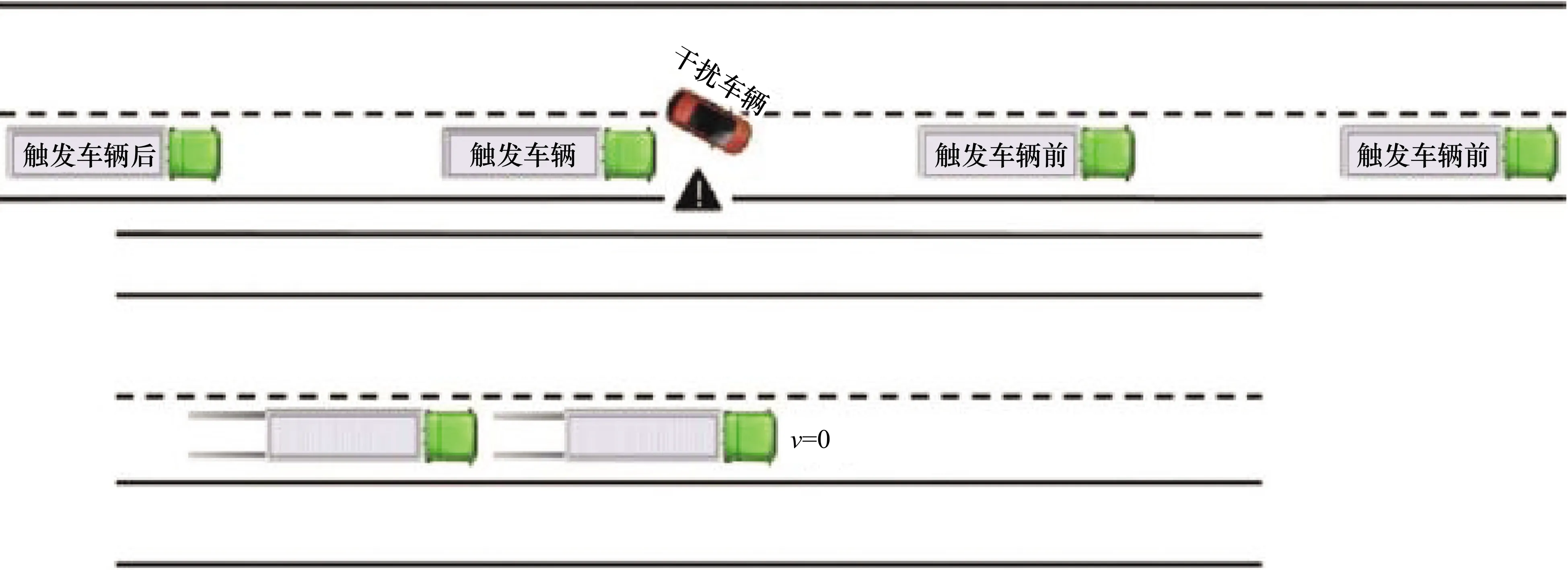
图2 智能网联车辆队列紧急制动路况场景
由图2可知,1辆小轿车在行驶的过程中突然变道,相对车速较大、车间距较小触发了自动紧急制动控制器的碰撞事件条件,使得队列中的第3辆车之后的所有车辆都必须进行紧急制动。在现实中,智能网联车辆队列中的任何一辆车都可能遇到这种情况,从而进入紧急制动状态。第1个进入紧急制动状态的车辆为触发车辆,发出紧急制动信息,车辆队列中的其他车辆在收到紧急制动信息后根据自身和触发车辆之间的位置关系来采取相应的措施,如图3所示。
由图3可知,当触发车辆在前方时,触发车辆后方的车辆将进入紧急制动状态。车辆结合前车的制动信息(减速度等)来确定该车的减速度,并发出车辆的实际减速度与期望减速度,判断车速是否为0。当触发车辆在后方时,根据触发车辆前方车辆的多少来采取不同的控制策略。如果前方车辆超过2辆,前方车辆保持原来的队列状态继续行驶;反之,车辆减速等待触发车辆及触发车辆后方车辆。设定等待时间tw,若超出等待时间触发车辆未发出追赶信息,那么触发车辆前方车辆继续行驶直到恢复原来的车速;若等待时间内紧急制动状况解除,那么后车开始追赶前车,直到所有的追赶车辆全部入队,然后逐步恢复到原来的车速。
2.2 他车插入路况
他车插入紧急路况包括2种情况:1)干扰车辆插入车辆队列且长时间停留;2)干扰车辆插入车辆队列并快速驶离,如图4所示[8]。
该路况下,干扰车辆和队列车辆之间具有较大的间距,同时相对速度较小,短时间内干扰车辆不会与受阻车辆产生碰撞。对他车插入路况制定控制策略如图5所示。
由图5可知,如果受阻车辆与干扰车辆存在碰撞风险,那么受阻车辆的自动紧急制动系统将触发,从而进行自动紧急制动;如果受阻车辆与干扰车辆无碰撞风险,那么受阻车辆及其后方的所有车辆一起减速,扩大和插入干扰车辆之间的距离。设定干扰车辆离开时间为t,如果干扰车辆在设定时间内离开,那么进行车速的调整,消除队列缺口,车辆队列进入稳定行驶状态。如果干扰车辆在设定的时间内未离开,那么形成新的车辆队列,且进入稳定行驶状态。

图4 智能网联车辆队列他车插入路况场景

图5 他车插入路况控制策略
3 仿真分析
3.1 仿真模型
为验证所设计控制策略的有效性,搭建PreScan/Simulink联合仿真模型。道路模型是从PreScan软件的基础设施库中将“straight road”拖动到工作台区域,在属性编辑区来设定相关的参数。在执行器模块,拖动车辆到道路上。通过build区域的actor来查看属性,确保对象匹配关联成功。在Invoke Simulink运行模式下进入Simulink仿真界面,通过Simulink界面来设置不同的控制策略。所搭建的仿真模型如图6所示。
由图6可知,所搭建的智能网联车辆队列共包含5辆车,分别命名为vehicle_1、vehicle_2、vehicle_3、vehicle_4、vehicle_5。车辆选择PreScan自带的车辆模型[9],车辆模型参数如表1所示。
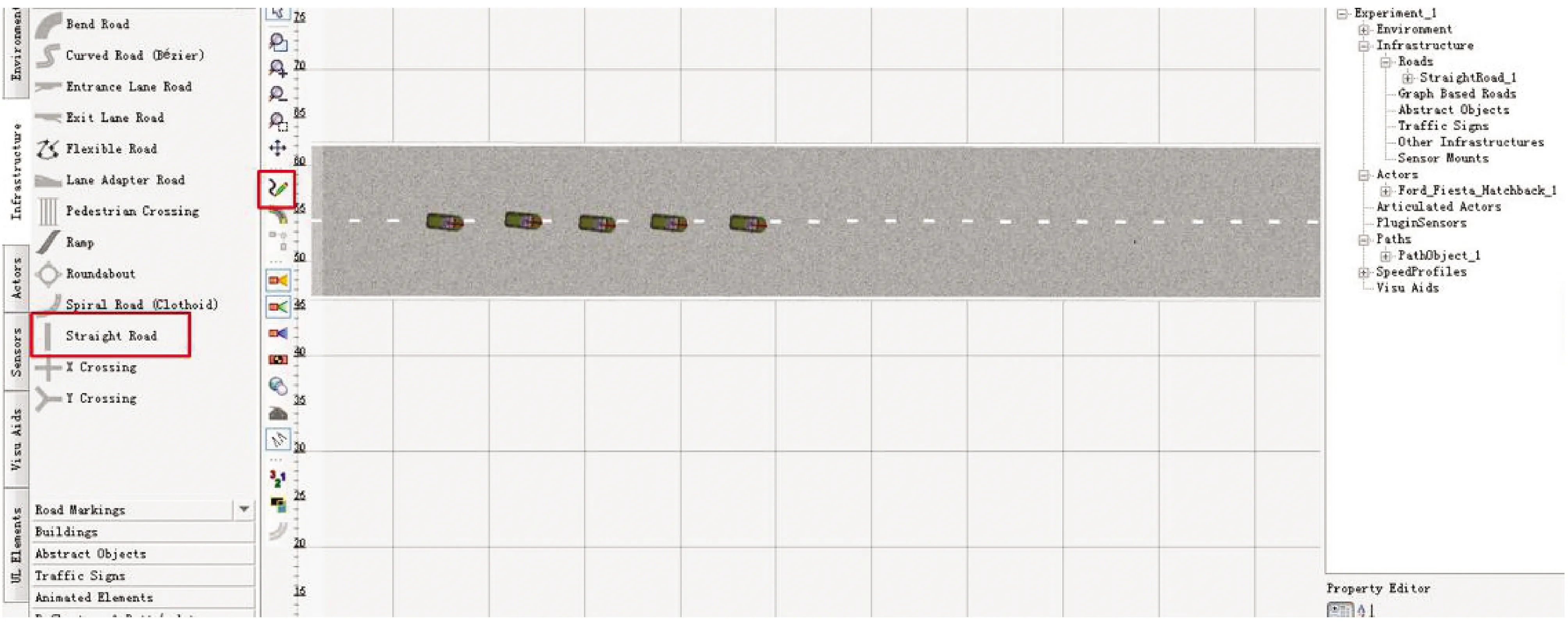
图6 PreScan/Simulink仿真模型

表1 车辆模型参数
在PreScan模型中,毫米波雷达参数如表2所示。

表2 毫米波雷达参数
3.2 仿真结果分析
对第1辆车紧急制动路况(路况1)进行仿真分析,原始速度为25 m/s,网联车辆队列均速直线行驶。当第1辆车前突然出现干扰车辆(35.5 s左右)时,获得队列中5辆车的速度和车辆间距曲线,如图7所示。
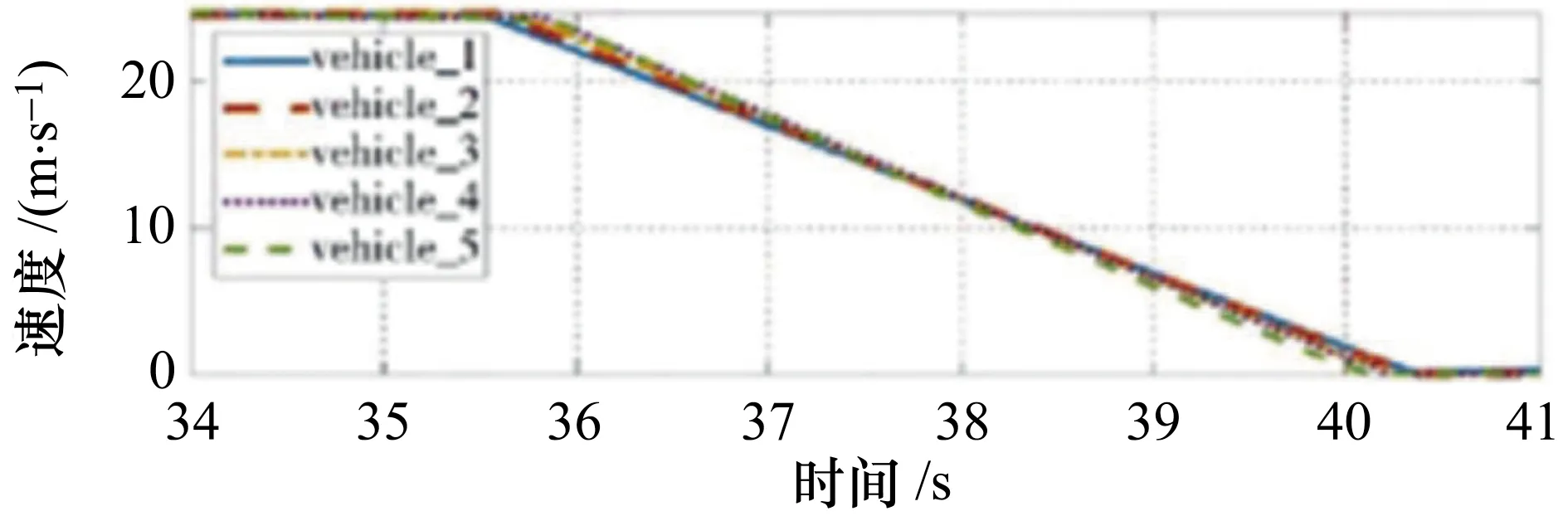
(a)速度变化

(b)车距变化图7 路况1的仿真结果
由图7可知,干扰车辆突然变道使得车辆队列的第1辆车产生紧急制动,后方车辆也进行紧急制动,车速降到0,队列相邻车辆的间距控制在15 m左右。干扰车辆突然变道,车辆队列中受到影响的车辆由自动驾驶状态转变为人工驾驶状态。受到车辆驾驶员反应时间、期望速度等因素的影响,队列中相邻车辆之间距离会急剧变化。
对他车插入队列并迅速驶离路况(路况2)进行仿真分析,原始速度为28 m/s,网联车辆队列均速直线行驶。当第2辆前插入外来车辆(130 s左右)时并快速驶离,获得队列中5辆车的速度和车辆间距曲线,如图8所示。
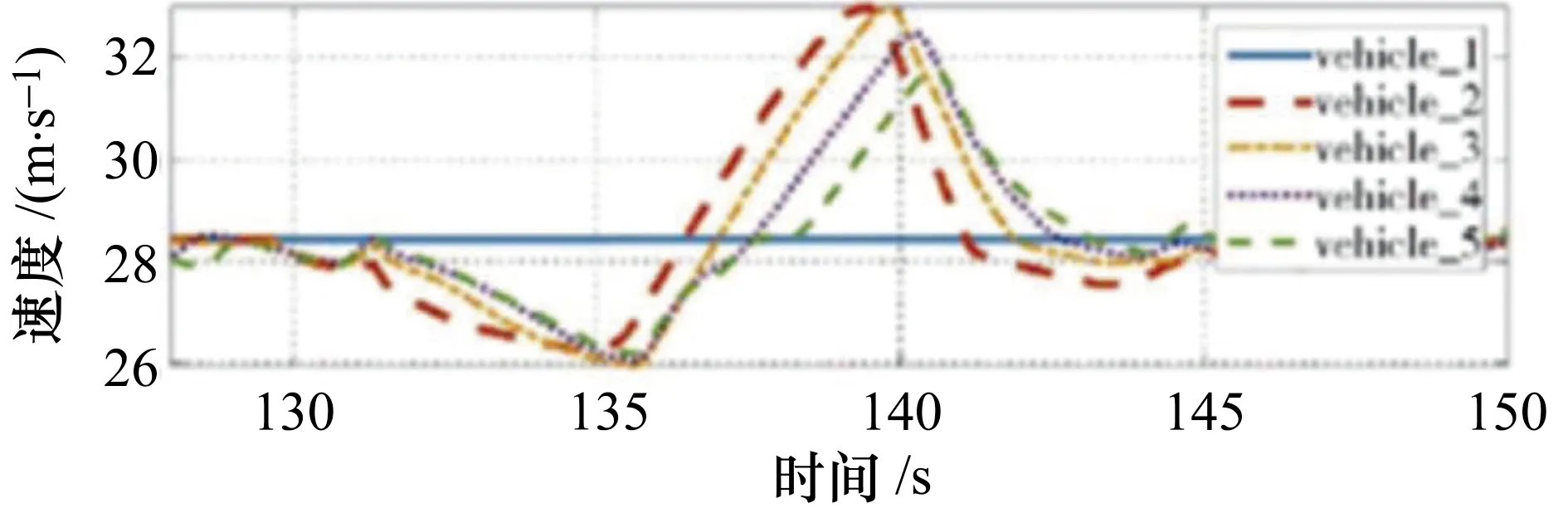
(a)速度变化

(b)车距变化图8 路况2的仿真结果
由图8可知,干扰车辆从车辆队列的第2辆车前方进入队列中,此时第2辆车检测到有外来干扰车辆,那么就会拉大和干扰车辆之间的距离。当干扰车辆驶离后,第2辆车以及后方车辆提速,缩小与第1辆车之间的距离。
对他车插入队列并长时间停留路况(路况3)进行仿真分析,原始速度为28 m/s,网联车辆队列均速直线行驶。当第3辆车前插入外来车辆(275 s左右)时并长时间停留,获得队列中5辆车的速度和车辆间距曲线,如图9所示。

(a)速度变化
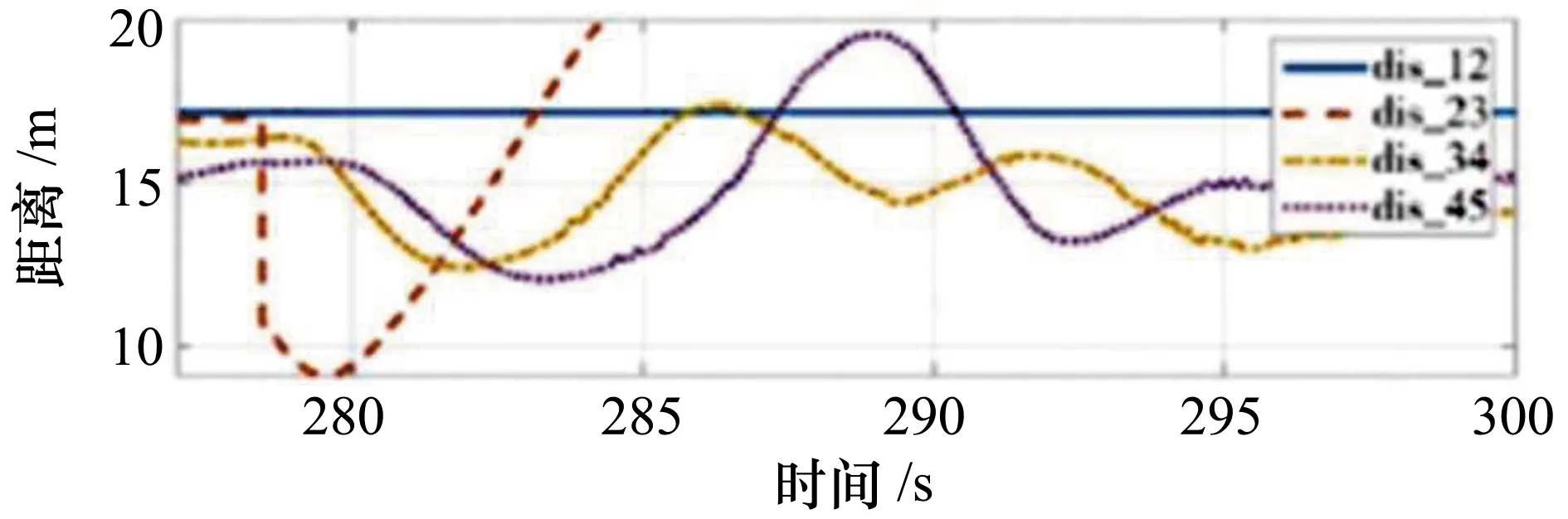
(b)车距变化图9 路况3的仿真结果
由图9可知,干扰车辆从车辆队列的第3辆车前方进入队列,第1辆车、第2辆车的速度以及车距不受影响。以第3辆车为界,车辆队列被自动拆分,拆分之后分别是以2车队列和3车队列继续行驶,其中2车队列的车速为28 m/s,3车队列的车速为23 m/s。
4 结论
本文对智能网联车辆队列在紧急路况下的控制策略进行研究,设计了紧急制动路况、他车插入并快速驶离路况、他车插入并长时间停留路况下的控制策略。采用PreScan自带的车辆模型来搭建智能网联车辆队列紧急路况下的仿真平台,完成了对3种紧急路况下车辆队列控制仿真。仿真结果表明,本文策略能够很好地保证车辆队列的安全,且行驶稳定。
猜你喜欢
中国交通信息化(2023年1期)2023-03-18
小学生学习指导(低年级)(2020年4期)2020-06-02
软件(2020年3期)2020-04-20
工业经济论坛(2020年6期)2020-04-13
汽车观察(2018年12期)2018-12-26
军营文化天地(2018年2期)2018-12-15
汽车观察(2018年10期)2018-11-06
传媒评论(2018年11期)2018-02-16
产品可靠性报告(2017年7期)2017-09-05
现代制造技术与装备(2015年4期)2015-12-23
