
盾构自动驾驶性能评价体系设计和应用
2023-12-13 08:08张昊澜卢孟栋
隧道建设(中英文) 2023年11期
张昊澜, 卢孟栋, 李 刚, 胡 珉, *
(1. 上海大学悉尼工商学院, 上海 201800; 2. 上海大学-上海城建集团建筑产业化研究中心, 上海 200072; 3. 上海隧道工程有限公司, 上海 200032)
0 引言
自1818年盾构问世以来,因其具有机械化程度高、施工速度快、对地面影响小等特点,被广泛应用于地下空间开发。随着盾构设计、研发和制造的水平越来越高,盾构开发应用范围日益广泛。然而,受到施工环境复杂、操作人员经验不足、设备性能不同等诸多因素影响,盾构法施工依然面临着质量、安全和进度的各种挑战。研究有效避免事故发生、加快施工进度、提高施工质量[1]的施工方法成为研究热点,其中盾构自动驾驶正逐渐成为盾构装备的主要发展方向。
盾构自动驾驶研究已经取得了一定的进展[2-9],微型盾构自动化发展尤为迅速。20世纪90年代,德国海瑞克公司推出直径1 500 mm以下的AVN系列隧道掘进机,通过模糊控制实现了掘进路径的自动控制;郭树棠[10]在泥水平衡微型盾构上开发了一套自动掘进系统,通过自动调整和控制各项掘进参数,完成了地下超高压输电线路管道工程。近年来,中大直径盾构的自动化探索也日渐兴起。 日本清水大学与名古屋工业大学联合开发了AI自动方向自动引导系统[11],并在盾构上进行应用,取得了较好的效果;马来西亚MMG公司以多个隧道区间掘进数据为样本,开发了A-TBM自动掘进系统[12]搭载在海瑞克盾构上,实现了TBM自动姿态控制和切削控制,并成功应用于吉隆坡KV地铁2号线;上海隧道和上海大学合作开发的“智驭号”盾构自主掘进控制系统[13],实现了自主姿态、压力、注浆和尾脂控制,在多个工程取得了成功应用。
随着盾构自动驾驶技术的发展,如何客观准确地评价盾构自动掘进性能引起了人们的关注。盾构自动驾驶划分为3个智能等级,依次为盾构辅助施工支持、盾构自动化操作以及盾构全自主作业。赵洪岩等[14]将盾构智能化从自动化的程度进行了分类,分为辅助巡航盾构、间歇性自动巡航盾构、常态化自动巡航盾构、自动控制盾构和智能掘进盾构5个等级。辅助巡航盾构基于当前的工况和盾构的运行状态对下一阶段的施工参数进行预测,用于指导施工决策;间歇性自动巡航盾构可实现在某一特定地层条件下的无人干预自动巡航;常态化自动巡航盾构可在大部分地层内长时间或长距离自主掘进,只在特殊条件下需要人工干预;自动控制盾构可针对施工中遇到的问题自主决策并实施,过程几乎不需要人工干预;智能掘进盾构控制系统完全模拟人脑,无需人工干预即可自主解决所有问题,完成整个区间的施工。Hu等[13]从人工介入的角度,将盾构自主掘进分为辅助驾驶、部分自动驾驶、条件自动驾驶和完全自动驾驶4个等级。辅助驾驶等级的盾构能完成小范围阶段的自动掘进,且人工介入较多,仅适用于一些简单、良好的施工环境;部分自动驾驶的盾构能够应对一些常见复杂施工环境,在大部分情境下完成盾构自动驾驶;条件自动驾驶的盾构无需人进行安全监控,能适应复杂施工环境的自动驾驶,特殊情况会主动保护并通知人进行处理;完全自动驾驶的盾构可在所有场景下完成自动推进工作,和所有安全问题的监控、处理。
目前自主的驾驶盾构评价主要是从等级评定入手,对盾构驾驶自动化程度进行等级划分。然而,人们对盾构自动驾驶性能缺乏详细全面的评价,这不利于研发者开展有针对性的改进工作,不利于使用者了解自动驾驶的技术特点和选择适合的产品,也会影响使用者对自动驾驶的接受度。因此,本文从隧道质量、环境安全、掘进效率、控制性能和用户体验5个维度建立盾构自动驾驶性能评价体系,并以此为基础,对“智驭号”自主掘进控制系统在南京和郑州不同工程中的表现进行评测,以期为盾构自动驾驶技术发展和智能盾构工业化提供支持。
1 盾构自动驾驶性能评价体系
1.1 评价体系架构
盾构自动驾驶的目的是提升隧道施工水平。本文从隧道工程需求出发,围绕安全、高质、高效和稳定4大核心目标并结合自动驾驶属性,进行评价体系的设计。因此,盾构自动驾驶性能从环境安全、隧道质量、掘进效率、控制性能4个维度对应4大目标,并从自动控制系统实际落地应用的角度,增加了用户评价维度,一共5个维度进行综合考量(见图1)。

图1 盾构自动驾驶性能评价指标体系
1)安全是隧道施工最为重要的任务。盾构掘进中最大的风险是由于周边环境扰动导致的环境失稳。因此,在本评价体系中环境安全评价以地面沉降为核心指标进行设计。
2)质量是隧道施工的核心任务。盾构掘进的目的是确保隧道按照设计要求构建,由于本文的自动驾驶讨论范围不包含管片拼装环节,因此,从盾构姿态控制视角评价对成型隧道质量的影响。
3)效率与隧道施工效益密切相关,只有实现高效推进,才有可能让盾构自动驾驶真正进入实际应用领域。效率评价以掘进速度作为核心指标,不考虑人工管片拼装环节的时间。盾构是一个需要长时间运行的设备,少产生故障,保持设备良好的性能尤为重要。
4)评价体系中将控制参数的稳定性纳入其中,以评判盾构在自动驾驶过程中能否平稳运行,减少对设备、隧道和管片的影响。因此,评价体系中围绕掘进运动和运行的核心参数波动性进行设计。
5)对于盾构自动驾驶而言,连续无人干预的掘进尤为重要。如果驾驶过程中由于各种控制系统软硬件、模型控制效果差或者现场操作员不认可自动控制模式等原因,导致自动控制模式频繁被切断,这就说明该自动驾驶系统性能离用户需求有一定差距。因此,评价体系中将自动驾驶系统使用比例作为衡量用户体验的指标。
1.2 评价指标设计
1)隧道质量。 不考虑管片和管片拼装质量,在自动驾驶阶段,隧道质量与盾尾姿态高度相关。质量指标基于盾构姿态偏差量和盾尾间隙的超标环数计算(单侧间隙小于允许的最小间隙量),盾构姿态偏差量按优秀率与合格率计算,如式(1)所示。姿态偏差的合格率计算可以参考GB 50446—2017《盾构法隧道施工及验收规范》制定,优秀指标范围可以根据工程管理项目方要求制定。本文中姿态偏差合格值为[-50 mm,+50 mm],优秀值为[-25 mm,+25 mm]。盾尾间隙作为惩罚项,基于超过盾尾间隙的环数对最终的得分进行扣分。
(1)
式中:α1、α2、α3为权重,可根据项目实际管理需求差异进行设定,本文α1、α2均设置为0.5,α3为1;Rrexcell为盾尾姿态控制优秀率;Rrpass为盾尾姿态控制合格率;Ngap为超过盾尾间隙阈值的环数;Nrpass为盾构掘进过程中整环盾构尾部高程偏差和水平目标偏差都在合格值范围内的环数;Nrexcell为盾构掘进过程中整环盾构尾部高程偏差和水平目标偏差都在优秀范围内的环数;Nr为自动推进的环数。如果tq<0,则得分为0。
2)环境安全。环境安全以地面测点累计沉降值的优秀率、合格率作为指标,具体计算如式(2)所示。
(2)
式中:α1、α2为权重,可根据项目差异进行调整,本文α1、α2均采用0.5;Rsexcell为监测点沉降控制优秀率;Rspass为监测点沉降控制合格率;Nsexcell为累计沉降在优秀范围内的测点个数;Nspass为累计沉降在合格范围内的测点个数;Np为项目所有的测点个数。
由式(2)可知,累计沉降优秀率、合格率统计的是测点处在优秀沉降范围或合格范围的比例。优秀和合格的评判指标可以参考GB 50446—2017《盾构法隧道施工及验收规范》制定,本文中沉降合格值定为[-30 mm,+10 mm],优秀值范围在合格率的70%范围内,为[-21 mm,+7 mm]。
3)掘进效率。掘进效率由不同地层下平均速度与最大允许速度比例的均值表示,从而体现实际掘进平均速度与设计最大允许速度相对关系,具体如式(3)所示。
(3)
式中:Di为i地层的长度;Dtotal为隧道总长;n为穿越地层类别数;viavg为i地层盾构平均推进速度;vimax为i地层施工最大允许速度。
4)控制性能。控制性能用于表征盾构设备运动和掘进过程是否平稳。运动平稳性用盾构切口偏差和推进速度的波动性体现,掘进平稳性通过切口土压、刀盘转矩和总油压波动性体现(采样频率为1 s)。波动性用参数标准差与允许波动范围的比值计算,具体见式(4)。
(4)
式中:R为波动性;stdhordev、stdverdev、stdspeed、stdtorque、stdpressure分别为切口水平偏差、切口高程偏差、推进速度、刀盘转矩和总油压的数据标准差;fhordev、fverdev、fspeed、ftorque、fpressure分别为切口水平偏差、切口高程偏差、推进速度、刀盘转矩和总油压的施工允许最大波动范围;α1、α2、α3、α4、α5为各指标的权重,可以根据项目实际情况进行分配,本文均设为0.2。
5)用户体验。 用户体验指标用于判断控制系统的可靠性和施工方对盾构自动驾驶的认可程度。其中,可靠性是判断系统各部分是否运行正常,导致系统不能正常运行的故障情况;认可度指认可自动驾驶的效果、愿意使用自动驾驶进行掘进的程度。通常系统发生故障或者施工方认为盾构自动驾驶的推进效果不佳时,会采取切换手动,因此,从自动驾驶系统的使用比例就可以清晰体现出模型被现场的接受度。本文的自动化率指盾构自动驾驶启用期间,在无第三方人员监督干预下、掘进过程中的自动模式占比。具体计算见式(5)。
(5)
式中:Nr为自动推进总环数;N为盾构推进总环数。
2 “智驭号”盾构自主掘进控制系统及工程评测
2.1 “智驭号”盾构自主掘进控制系统
以“智驭号”盾构自主掘进控制系统为例,对自动驾驶性能进行评价。“智驭号”盾构自主掘进控制系统可采用搭载方式与传统盾构相结合,在盾构掘进过程中围绕姿态控制和沉降控制2大任务,结合对掘进工况的辨识,不断调整和优化掘进策略、自主规划控制目标、实时调节盾构推进速度、刀盘转速、切削面压力、分区油压、注浆量等核心控制参数,以无人干预的方式自动掘进,并保证推进过程中周边土体的稳定性,以及推进完成后隧道位置的准确性。
“智驭号”盾构自主掘进控制系统在杭绍城际铁路SG-6标柯华路站—笛扬路站左线完成了首次自动掘进后,又在柯华路站—稽柯风井左线进行了优化提升,而后在南京、郑州和上海等工程中进行推广性工程应用,以进一步验证系统对不同类型盾构、不同地质、不同周边情境的控制性能。
本文以“智驭号”盾构自主掘进控制系统在南京市地铁5号线TA02标段科宁路站—竹山路站区间左右线、郑州8号线2标04工区圃田站—圃田西站区间左右线共4个区间的工程情况为样本,采用本文提出的评价指标体系,分析“智驭号”盾构自主掘进控制系统在不同地层中的控制性能和特点。
2.2 评测工程简况
2.2.1 南京地铁5号线科宁路站—竹山路站区间
南京市地铁5号线TA02标段科宁路站—竹山路站区间(简称: 南京科竹)总长约732.888 m,埋深为15.3~22.7 m。隧道沿线地质情况复杂,有淤泥质粉质黏土、上软下硬复合地层、硬岩和黏土等多种地层,隧道地质情况如图2所示。隧道沿线工程地质、环境条件复杂。粉土、粉质黏土与粉土互层在水头差作用下容易产生流砂、管涌现象,继而产生较大的沉降,复合土层部分由于软硬变化复杂、接触界面多变,施工参数易产生较大波动,并影响掘进效率。岩层部分存在局部破碎、裂隙发育的现象,对地层扰动敏感。盾构推进期间,平面线型包括1个半径450 m的小转弯半径段(见图3),高程线型分别经过了-22‰下坡和26.3‰上坡。该区间左、右线分别从第58环和482环开始自动驾驶。

图2 南京科竹区间地质剖面图

图3 南京科竹区间平面线型图
2.2.2 郑州地铁8号线圃田站—圃田西站区间
郑州8号线2标04工区圃田站—圃田西站区间(简称: 郑州圃圃)右线总长2 655.993 m,左线总长2 619.345 m,埋深4.32~20.24 m。隧道主要穿越土层为②41粉砂、②51细砂、黏土和粉土等土层,如图4所示。砂性土地层有黏聚力小、内摩擦角大、渗透系数大、流动性差、稳定性差等特性,对盾构掘进速度和转矩影响都很大,经刀盘切削到土舱中的砂土塑流性差,容易造成设备磨损严重、渣土温度高、出土困难以及地面沉降难等问题。从平面线型图(见图5)可以看出,隧道掘进前期平面线型呈现小转弯半径(R=400 m)的显著特点,高程线型比较丰富,有24‰的上坡和下坡,给盾构掘进路径规划带来比较大的挑战。该区间左、右线分别从第716环和203环开始自动驾驶。

图4 郑州圃圃区间地质剖面图

图5 郑州圃圃区间平面线型图
3 “智驭号”自动驾驶性能评价
3.1 隧道质量
3.1.1 南京科竹区间
南京科竹区间自动驾驶应用过程中,盾尾水平和高程偏差的优秀率和合格率情况见表1。从合格率来看,2条线都达到了100%,但是优秀率上,左线比右线总体都低了10%,主要原因是左线比右线推进的环数多了近5倍,并且在整个项目中的占比也是左线远大于右线,所以左线经历的线型和土质与右线相比要复杂得多。例如: 左线在岩层与软土交接处多次出现纠偏能力不足的情况,另外,右线在推进过程中,高程以上坡为主,其推进难度也低于下坡。该项目的盾尾间隙最小限制为15 mm,所有推进环的管片拼装四周检测均大于间隙限制,最后根据式(1),可计算得到科竹区间,左右线隧道的质量维度评价指标值分别为93.06和97.69。

表1 南京科竹隧道姿态优秀率与合格率
南京科竹区间自动驾驶推进过程中盾尾高程、盾尾水平偏差分布如图6所示。由图可以看出: 1)左线和右线盾尾高程控制的情况基本一致。左线盾尾和右线盾尾高程偏差基本为正态分布,整体偏差范围在-30 mm~+30 mm,均值约为5 mm。2)左线和右线盾尾水平控制的情况并不一致。左线呈正态分布,偏差范围为-30 mm~+30 mm;右线盾尾水平的范围总体在0~20 mm。这可能是因为右线自动掘进系统接入较晚,在482环才介入施工,此时盾尾水平正处于小曲率右转弯半径工况下,右线控制时实施了右侧优先的策略。

(d) 右线盾尾高程偏差
图7展示了南京科竹区间不同线型的盾构姿态控制能力。由图可知: 1)在水平控制方面。总体优秀率比较接近,都能保持在90%以上,从具体线型看,缓和曲线和直线都优于转弯段的优秀率,这是由于转弯段对纠偏难度高于直线段。2)在高程控制方面。上坡段的高程优秀率会明显好于下坡段,这是由于地层有一定浮力作用,使得上坡段控制稳定高于下坡段;另外,直线段的优秀率明显好于变坡段,这也是变坡段难度更大所致。

(a) 水平线型

(b) 高程线型
3.1.2 郑州圃圃区间
在郑州圃圃区间中,2条线路优秀率和合格率情况见表2,左右线隧道的质量维度评分分别为98.32和97.17。值得注意的是,右线盾尾高程偏差出现了没有达到100%合格的情况。对每环数据检查后发现,有6环超限,是因为测量系统换台重新校准时,产生了较大的测量修正值,具体情况如图8所示。由图可以看出,在1 415环测量换台后,盾尾水平值有40 mm的变化,盾构采取了平缓纠偏的策略,用了10环左右将其纠到20 mm以内,其余的偏差控制都在合格范围内。该项目盾尾间隙的限制设置为20 mm,同样没有超标的环数。

表2 郑州圃圃隧道姿态优秀率与合格率

图8 郑州圃圃右线测量换台情况
盾尾高程和水平偏差分布如图9所示。由图可以看出: 左右线盾尾姿态分布大致呈现正态分布,并且呈现非常陡峭的形态,偏差范围在-20 mm~+20 mm,优于南京科竹项目。
图10展示了郑州圃圃区间不同线型姿态控制能力。由图可知: 1)水平方向的控制规律与南京项目比较相似,控制性能从易到难按直线段、缓和曲线段和小半径转弯段排列。2)高程线型方向的控制规律与南京项目一样,呈现上坡易于下坡、直线段优于变坡段的特点;但是,上坡和下坡的差异不如南京那么明显,这可能与郑州的砂性土土体更稳定有关。
3.1.3 小结
隧道质量对比如图11所示。由图可以看出,2个项目的隧道质量评分均大于90分,得分较高。究其原因,是由于这几条隧道的盾构姿态偏差数据大部分情况下都达到了施工优秀的标准,这说明控制系统在不同的项目中有良好的适应性,姿态控制能力优秀。但是,还是能从得分高低看出一定的差距。2个项目中,郑州隧道质量普遍优于南京隧道,这可能与郑州项目的砂性土质相比南京项目的复合土层更为均匀、系统控制更加容易有关。
各项目盾构尾部姿态优秀率对比如图12所示。由图可以看出,所有项目的盾尾水平优秀率都高于盾尾高程优秀率,这说明高程控制的难度高于水平控制,是未来自动驾驶系统必须加以重视的地方。

(a) 左线盾尾水平偏差

(b) 左线盾尾高程偏差

(c) 右线盾尾水平偏差

(d) 右线盾尾高程偏差

(a) 水平线型

(b) 高程线型

图11 隧道质量对比

图12 盾构尾部姿态控制优秀率对比
3.2 环境安全
3.2.1 南京科竹区间
南京科竹区间自动驾驶中,左线地面沉降控制合格率100%,优秀率78.90%;右线自动驾驶沉降控制合格率100%,优秀率100%。左线和右线的环境安全维度评分分别为89.45和100。左线优秀率低于右线可能是因为左线掘进通过的地层比较丰富,而右线开始得比较晚,以黏土地层为主,沉降较易控制。
图13展示了姿态对淤泥质粉质黏土、上软下硬复合地层、全断面岩层和黏土地层沉降控制的表现。由图可以看出:在淤泥质粉质黏土中,由于土层含水率高,自立性差,整体沉降值较大;在上软下硬复合地层中,沉降值分布范围较大,沉降控制效果波动较大;在全断面岩层和黏土中,由于此类岩土自立性强,沉降小且稳定。
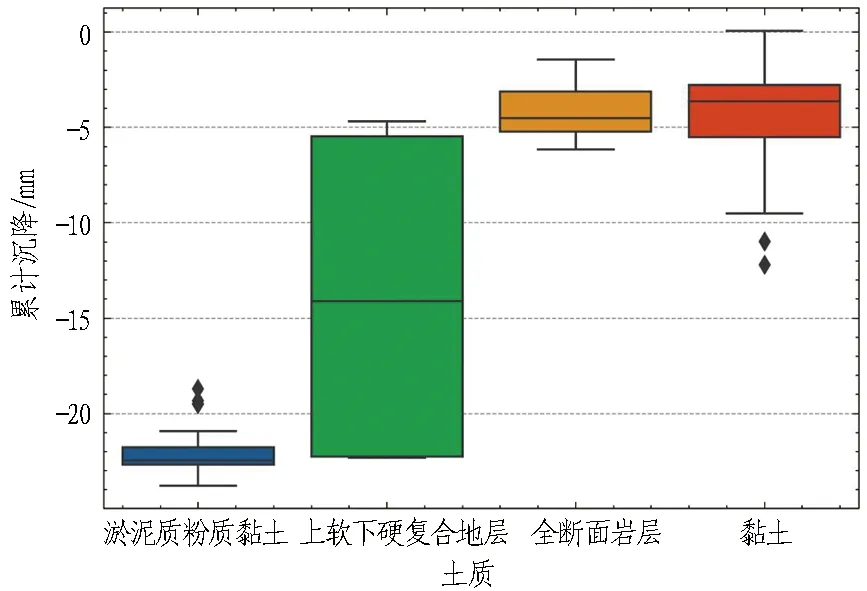
图13 南京科竹不同地层沉降分布图
3.2.2 郑州圃圃区间
郑州圃圃区间自动驾驶中,左线地面沉降控制合格率100%,优秀率97.27%;右线自动驾驶沉降控制合格率100%,优秀率100%。左线和右线的环境安全维度评分分别为93.27和98.64。郑州工程穿越了黏质粉土与粉砂互层、砂性土、黏质粉土、黏土与粉土互层4种地层。4种土层累计沉降分布如图14所示。由图可知: 在黏质粉土与粉砂互层段,由于土层埋深较浅且土层自立性好,累计沉降均值最小;在砂性土中,沉降分布范围变广,原因可能是在砂性土中刀盘转矩变大,压力控制稳定性降低有关;在黏质粉土中,该土层土质较软,推进过程中速度较快,累计沉降均值最大;黏土与粉土互层中,沉降均值与砂性土大小基本相同,相比砂土其稳定性有所上升。整个沉降控制基本在-5~-20 mm,控制效果完全能够满足工程需求。
3.2.3 小结
图15和图16对比了2个工程4条线路的优秀率和环境安全得分。除南京科竹左线外,总体环境安全得分都超过了90,优秀率也都在85%以上,控制效果良好;南京科竹左线的沉降控制还不够优秀,这可能是由于系统对于该区段中淤泥质粉质黏土层沉降规律掌握不够全面导致的。

图14 郑州圃圃不同地层沉降分布图

图15 沉降优秀率对比

图16 环境安全指标结果对比
3.3 掘进效率
3.3.1 南京科竹区间
南京科竹区间自动驾驶应用过程中,左线主要穿越了淤泥质粉质黏土、上软下硬复合地层、全断面岩层和黏土4种地层,右线由于从482环开始自动驾驶,主要穿越黏土层。
表3展示了不同地层下,平均速度与最大允许速度之比和效率值。由表3可知,左线推进过程中,淤泥质粉质黏土层速度最高,而全断面岩层速度最低;左线黏土层速度略高于右线,但差距不大。总体来看,除在左线全断面岩层段速度比率较小,未达到工程理想值,其余地层下平均速度与最大允许速度之比都达到该地层最大允许速度的80%以上,因此,后续可考虑如何进一步提升全断面岩层掘进效率。

表3 南京科竹区间不同地层推进效率
图17展示了南京科竹区间各地层速度分布。可以看出: 在淤泥质粉质黏土层和全断面岩层中速度非常稳定,而在上软下硬复合地层推进速度波动范围大,这可能与该地层刀盘接触界面多变、施工参数易产生较大波动有关。
3.3.2 郑州圃圃区间
郑州圃圃区间自动驾驶应用过程中,右线主要穿越了黏质粉土与粉砂互层、砂性土、黏质粉土、黏土与粉土互层4种地层,左线由于从700环开始自动驾驶,主要穿越砂性土、黏质粉土、黏土与粉土互层3种地层。不同地层速度、平均速度与最大允许速度之比和效率值如表4所示。

图17 南京科竹区间不同地层速度情况

表4 郑州圃圃区间不同地层推进速度情况
由表4可知: 1)右线除了砂性土段速度比率未达到80%,其余地层速度比率都在80%以上。2)黏土与粉土互层中平均速度与最大允许速度之比最高,但是在该土层中右线最大允许速度明显小于左线,这是因为在该土层推进过程中右线刀盘电机局部损坏,使得盾构推进能力受限。3)左线在黏质粉土中速度比率虽然是最低的,但右线在黏质粉土中速度比率较好,并且实际掘进速度左右线差距较小,因此可认为2条线在该土层中掘进效率基本一致。4)盾构在砂性土中推进效率低,因此,控制系统开发时应加强对砂性土层掘进效率的研究。
图18展示了郑州圃圃区间各地层速度分布。由于刀盘故障,左右线的速度分布呈现了不同的特征。总体上看,大部分地层中速度控制比较稳定,但在黏土与粉土互层、黏质粉土中,速度相对波动较大;此外,左右线在不同土层中速度分布特征有明显差异,除了受设备故障影响,其他因素还有待进一步分析。

(a) 郑州左线
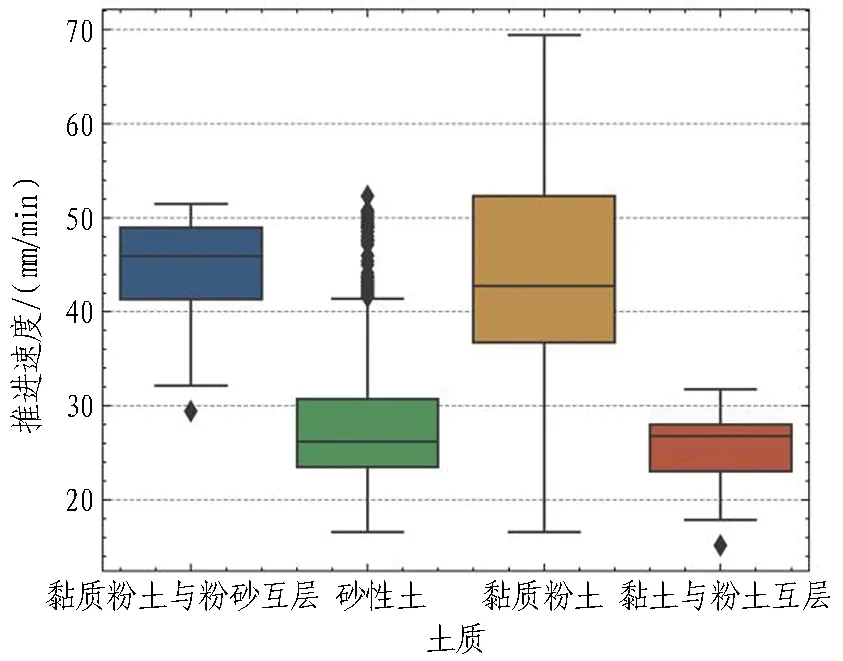
(b) 郑州右线
3.3.3 小结
图19展示了南京和郑州项目掘进效率得分。由图可知: 两者差距不大,得分均超过了80分,说明自动驾驶对掘进速度控制整体能力较为均衡。但是掘进效率受到各地层物理性质的影响,在土质较松的软土层,盾构掘进效率要略高于80分,而在土质较硬的土层或者全断面岩层,掘进效率会明显下降,一方面说明在硬土层掘进速度控制难度较大,另一方面也说明控制系统在此类土质中的控制性能有待提高。
3.4 控制性能
3.4.1 南京科竹区间
从整个区间来看,南京科竹的控制效果见表5。左右线总体得分差距不大,差距主要体现在反应推进稳定性的切口姿态控制方面,这可能是因为右线推进的环数较少,地层单一,所以其姿态波动比左线小。

图19 掘进效率对比

表5 南京科竹区间掘进参数波动性以及指标计算结果
图20展示了盾构在不同地层关键指标波动情况。可以看出: 1)从运动的平稳性来看(见图20(a)),在切口姿态控制方面,切口高程控制波动性在上软下硬复合地层中最大,可能是上软下硬复合地层对盾构切口处压力分布的一致性产生了影响;切口水平控制波动性在黏土中最大,可能原因是该地层正处于水平R=450 m 小曲率线形,纠偏难度较大,导致姿态波动大。切口的姿态波动在全断面岩层中是4种地层里最小的,这与全断面岩层土质坚硬、支撑性好的特点有关,使得姿态值变化较小。2)在盾构运行方面(见图20(b)),速度波动性在淤泥质粉质黏土层中最大,在全断面岩层波动较小,这可能与控制系统受土层对速度提升空间影响有关。3)刀盘转矩波动在全断面岩层中最大,在淤泥质粉质黏土层中波动最小(见图20(c)),这与土体改良系统的不稳定性对切削面带来的影响有关。4)总油压的波动情况与刀盘转矩的波动情况类似(见图20(d)),即在全断面岩层中的波动最大,在淤泥质粉质黏土层的波动最小。

(a) 切口姿态

(b) 掘进速度

(c) 刀盘转矩

(d) 总油压
3.4.2 郑州圃圃区间
表6示出郑州圃圃区间各个参数的波动情况以及最终指标计算结果。由表可以看出,右线和左线相比,切口姿态、刀盘转矩波动性明显高于左线。对于切口姿态来说,其波动大的原因是右线开启自动驾驶较早,经历了小转弯半径的掘进(R=400 m)以及大角度的下坡;而对于刀盘转矩,右线比左线高了将近1倍,其主要原因仍是右线最后250环刀盘电机损坏引发刀盘转矩明显下降所导致。
图21展示的是郑州2条线在不同地层各项参数的波动情况。可以看出: 1)从运动的平稳性来看,姿态的波动在4种土层中都比较接近,切口水平方面波动明显偏大的是黏质粉土层的切口水平姿态,这个波动可能是几次测量换台导致姿态值出现较大的跳变导致的,切口高程方面在4个土层中都比较一致; 2)关键施工参数方面,盾构在黏质粉土层中速度的波动较大,速度也更快,这与南京项目情况类似; 3)对于刀盘转矩来说,黏土与粉土互层的刀盘转矩波动明显偏大,这可能是由于刀盘电机损坏后转矩从之前的平均5 500 kN·m降到3 500 kN·m的缘故; 4)总油压方面,黏质粉土波动小,其他几个土层波动性略大。

表6 郑州圃圃掘进参数波动性以及指标计算结果

(a) 切口姿态

(b) 掘进速度

(c) 刀盘转矩

(d) 总油压
3.4.3 小结
图22展示了南京和郑州项目的控制性能对比情况,郑州项目的控制性能明显低于南京。波动情况对比见图23。由图23可知,受地层影响,南京项目在刀盘转矩和推进速度的波动上明显比郑州小一些,特别是由于郑州的砂层和黏土、粉土层有相对频繁的变换,导致控制系统与地层匹配效果变差,其速度和刀盘转矩控制能力变弱。当然,郑州的设备问题也影响了刀盘转矩和速度值。南京项目的地层变化频率低,因此,对实际控制性能影响小。
3.5 用户体验
3.5.1 南京科竹区间
南京科竹区间自动驾驶应用过程中,去除因设备机械故障、高压断电等外因无法使用自动驾驶外,左线自主掘进占比97.5%,右线自主掘进占比96.75%,自动驾驶掘进占比非常高。图24展示了自动切换人工的原因。其中,除13.0%是对模型效果存在争议外,最常见的问题是自动驾驶硬件问题,主要包括内外网通讯异常、数据采集故障、电脑自动更新和电脑宕机等;其他少部分原因是工控机故障、前期司机对自动驾驶不熟悉或不会操作没有使用等。因此,自动驾驶在应用阶段应定期检查电脑硬件运行状况,确保系统的正常运行;在应用前期还需对司机进行强化培训,提升司机对自动驾驶的理解和操作能力。

图22 控制性能指标结果

图23 波动情况对比
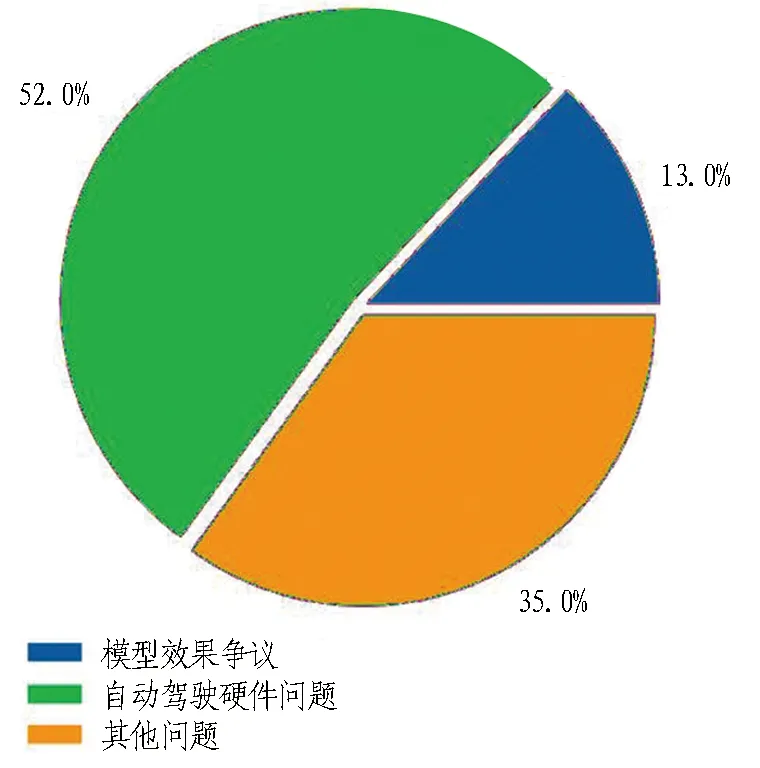
图24 南京工程自动模式切换人工模式原因分类
3.5.2 郑州圃圃区间
郑州圃圃项目中,除因设备机械故障、高压断电、测量换站等外因无法使用自动驾驶的环数,左线和右线自主掘进占比分别为91.72%、95.09%。图25展示了自动模式切换人工模式的原因分类。1)自动驾驶硬件问题是第一诱因。2)模型效果争议主要集中在推进速度和姿态控制策略2个方面。推进速度方面,由于处于砂层土,自动驾驶以确保转矩安全下的稳定推进策略控制,而人工控制是以快速推进为主,转矩过大则进行速度急降;纠偏策略方面,自动驾驶采用柔和平滑的纠偏控制,当因测量换台等因素出现较大幅度的偏差时,部分司机觉得自动纠偏策略过于保守。

图25 郑州工程自动模式切换人工模式原因分类
3.5.3 小结
虽然郑州和南京自动化率都很高,但是其模式切换的原因有明显的区别。产生这一区别的主要原因是2条线路的管理制度有所不同,南京项目要求盾构司机只要在设备正常的情况下就要尽可能使用自动驾驶系统,而郑州项目给予盾构司机更多的选择权,即只要不认可自动驾驶系统,即可切换人工推进。此外, 自动驾驶系统的硬件故障也是2个项目切换人工的原因,因此改善自动驾驶系统的硬件稳定性对用户体验至关重要。
3.6 总体性能评价
图26展示了“智驭号”自主掘进控制系统在4条隧道中的得分情况。由图可知: 南京科竹右线的包络线面积最大、性能最佳,但4条隧道各维度的评分差距均在15%以内,可见“智驭号”盾构自主掘进控制系统能较好地适应不同的工况。
1)隧道质量方面。4条隧道的得分均能达到90分以上,得分差距不大。控制系统在砂性土的表现优于在黏土和全断面岩层中的表现。
2)环境安全方面。自动驾驶系统在不同的土质下都能有85分以上的得分,但各条隧道得分有所不同。沉降控制能力与土层相关性不是太大,南京和郑州各有1条隧道表现突出。
3)掘进效率方面。4条隧道的得分非常接近,都在80分左右,但是离施工期望的最大速度还是有一定的距离,这意味着系统应该在速度提高方面进行更多的研究。
4)控制性能方面。4条隧道的差距较为明显,南京的2条隧道明显好于郑州的2条隧道。结合前期的分析,可以明显看到郑州的刀盘转矩和推进速度波动明显大于南京。因此加强砂性土中控制稳定性的研究非常重要。
5)用户体验方面。4条隧道的用户体验得分较为接近,但郑州略低于南京。在前面分析中,也可以看到其主要的原因在于管理制度的不同。因此,在项目推广上,如何既推动自动驾驶技术普及,又兼顾施工方认知,达到双赢的目的,还需要再进行研究。

图26 项目评价雷达图
4 结论与讨论
本文针对现有盾构自动驾驶评价不够细致的问题,提出了盾构自动驾驶性能评价体系,从隧道质量、环境安全、掘进效率、控制性能和用户体验5个方面建立了盾构自动驾驶性能评价指标体系。基于自动驾驶评价体系,对“智驭号”自主掘进控制系统在南京和郑州项目的表现进行评测。评测结果表明: 总体上看,“智驭号”自主掘进控制系统在各个维度下的控制效果较好,在不同盾构、不同地层、不同线型表现稳定。对评测的每一个维度深入分析后发现: “智驭号”自主掘进控制系统在高程下坡段姿态控制方面总体不如其他线型,其优秀率排名总体差于上坡段;当出现不同地层时,沉降控制偶尔会存在沉降大的情况,这在南京科竹左线推进时表现得尤为明显;此外,在控制稳定性方面,以砂性土为主的郑州项目的控制性能得分比南京低10分左右,这说明控制系统在砂土地层的控制能力有待继续提升;最后,推进效率也是“智驭号”自主掘进控制系统比较薄弱的方面,4条线的效率得分都在80分左右。因此,系统应该在这些方面加大研发的力度。
虽然该评价体系已能较为全面地评价盾构自动驾驶的掘进过程,但该体系仍有进一步提升的空间。首先,评价体系可以纳入更多与用户体验、人因工程等相关的评价指标,使其更精确地体现盾构自动驾驶的可用性,充分考虑操作者的感受和实际需求;其次,评价体系的覆盖范围应进一步扩展到盾构驾驶的全过程,包括从掘进到拼装的所有阶段,这将有助于全面评估和理解控制系统在各个阶段的优劣表现,进一步完善和优化盾构自动驾驶性能。
猜你喜欢
大众标准化(2022年7期)2022-05-20
施工技术(中英文)(2021年12期)2021-08-05
文体用品与科技(2019年2期)2019-01-30
筑路机械与施工机械化(2018年8期)2018-09-03
新作文·初中版(2018年2期)2018-02-06
中国房地产业(2016年9期)2016-03-01
工程建设与设计(2016年4期)2016-02-27
天津建设科技(2015年6期)2015-03-15
中国质量与标准导报(2014年7期)2014-02-28
