
基于信道图谱的5G+北斗融合定位方法
2023-12-17 02:40张千坤陈任翔钟志刚刘西西张宸宾中讯邮电咨询设计院有限公司北京00048中国联通江西分公司江西南昌330000
邮电设计技术 2023年11期
张千坤,陈任翔,曾 炜,钟志刚,刘西西,张宸宾(.中讯邮电咨询设计院有限公司,北京 00048;.中国联通江西分公司,江西南昌 330000)
1 概述
近年来,随着科技的不断进步,人们对导航定位的要求越来越高,促使导航定位技术不断革新。然而在很多场景下,传统的卫星定位技术[1]并不能很好地解决定位问题,包括精度要求不满足、定位结果不连续、定位时间过长,同时在定位过程中常会受到信号干扰、地形遮挡、多径效应等,尤其是在城市峡谷中,卫星信号强度会大幅降低[2],从而导致定位精度会受到影响,不能满足特殊情况下的定位需求。当可见卫星数不足,难以得到定位结果时,在测试区域内部署定位5G 基站,利用5G 定位技术同卫星定位技术相结合进行联合定位是一种有效的解决途径。
目前5G 现网设备进行定位的方式有基于时间或者基于角度的方法[3-4],在进行时间估计时,会引入相位误差,需要联合多个射频单元采用上行到达时间差(UTDOA)进行定位,这种定位方法需要射频单元之间严格同步,因此需要在设备上电之前进行校正。另外一种是基于AOA 的方式进行定位,这种方法在室内射频单元只有2 通道时,无法完成角度估计解算[5]。同时现有的基于5G 和北斗融合定位技术主要有2 种,一种是建立北斗地基参考网络,由5G基站广播差分数据给用户终端,从而提高定位的精度[6],但是这种定位方式同样需要用户终端搜到足够的星才能进行定位,当可见卫星数不足时依然无法定位,另外一种是采用GNSS/5G 紧组合融合定位方法[7],这种方法是研究5G毫米波[8]与GNSS融合定位模型,毫米波基站需要与用户处于可视环境下才能正常通信,如果处于非可视环境下定位误差会很大,而且,目前毫米波基站没有商用,实施起来有一定的困难。
基于此,本文提出的一种基于信道图谱的5G与北斗融合定位方法,首先在室内环境下采用基于信道图谱的5G 定位方法,把定位问题转化为图像识别问题,不需要对角度或者时间进行估计。其次针对室外城市高楼林立的场景,由于建筑物等遮挡导致的非视距信号也会使卫星导航系统可靠性下降甚至失效,将5G定位与北斗定位进行融合,可以弥补北斗在室内及遮挡条件下定位性能的不足。
2 基于信道图谱的5G定位技术
5G定位的整体框图如图1所示。
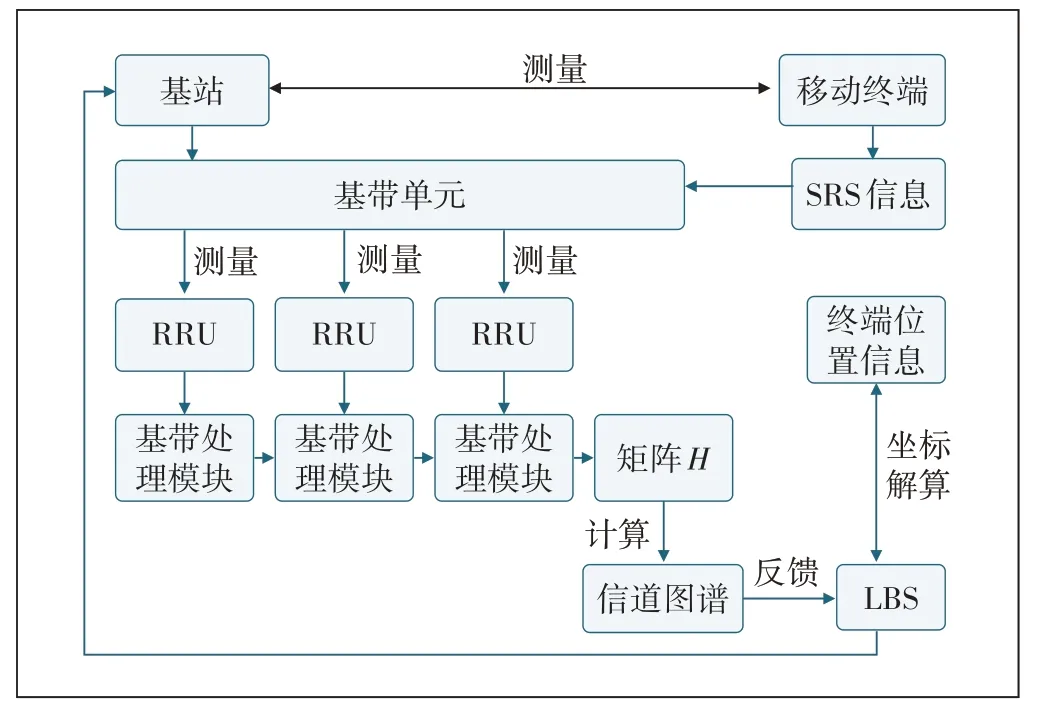
图1 5G定位框图
a)给要测量的终端配置上行SRS 信息(信道探测参考信号)。
b)在对应的SRS 信息位置,基带单元测量每个射频天线(RRU)收到信号的信道估计矩阵H。
c)基带单元根据信道估计矩阵H,得到信道图谱。
d)位置解算服务器(LBS)的位置解算分2 个阶段:离线阶段和在线阶段。在离线阶段,建立信道图谱与用户位置之间的关系;在在线阶段,根据信道图谱来解算用户的位置信息。
2.1 信道估计矩阵H
在现网设备中,信道矩阵H并没有对外开放,基于此,本文根据3GPP 发布的5G NR 标准对信道进行建模,基于CDL信道模型[9]生成5G NR信道数据。
信道仿真数据配置如表1所示。
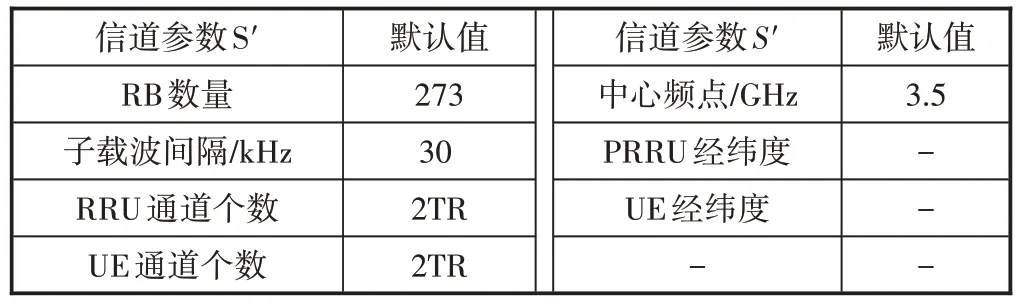
表1 信道仿真数据配置
根据设置的参数S',采用射线跟踪模型[10-12],模拟从BS 到UE 的传播路径,如图2 所示。其中红色标记代表BS,蓝色标记代表UE,图2 中的射线是通过射线追踪产生,其颜色对应的是电磁波传播的路径损耗(dB)。

图2 BS到UE的信号传播路径
将UE 到BS 天线的所有路径合并生成通道数据,即上行SRS参考信号数据,并进行信道估计,获得信道状态信息CSI,即信道矩阵H。
式中:
D——信号路径的个数
αk和τk——第k条路径的信号衰减系数以及信号传播时延
fn——载波频率,fn=f0+nΔf
Δf——相邻2个子载波之间的间隔
SRS参数配置如图3所示。

图3 SRS配置
2.2 信道估计矩阵压缩
根据3GPP 协议,频域12 个子载波称之为1 个RB(Resource Block),1 个时隙为14 个OFDM 符号,为了减少计算量,本文将信道矩阵H按照1个时隙的RB 作为基本单位进行压缩,信道时频图如图4所示,信道矩阵压缩步骤如图5所示。

图4 信道矩阵时频图

图5 信道矩阵压缩
原始的信道矩阵如下:
在时域按照1个时隙进行压缩得到:
在频域按照RB进行压缩:
最终得到的压缩矩阵D表示为:
仿真结果如图6所示,x轴表示的是子载波数,y轴表示信道矩阵的幅值,可以看到,压缩后的信道矩阵的幅值的变化趋势基本和原始数据保持一致,因此通过信道插值[13]的方式也可以通过压缩后的信道将原始的信道恢复出来。
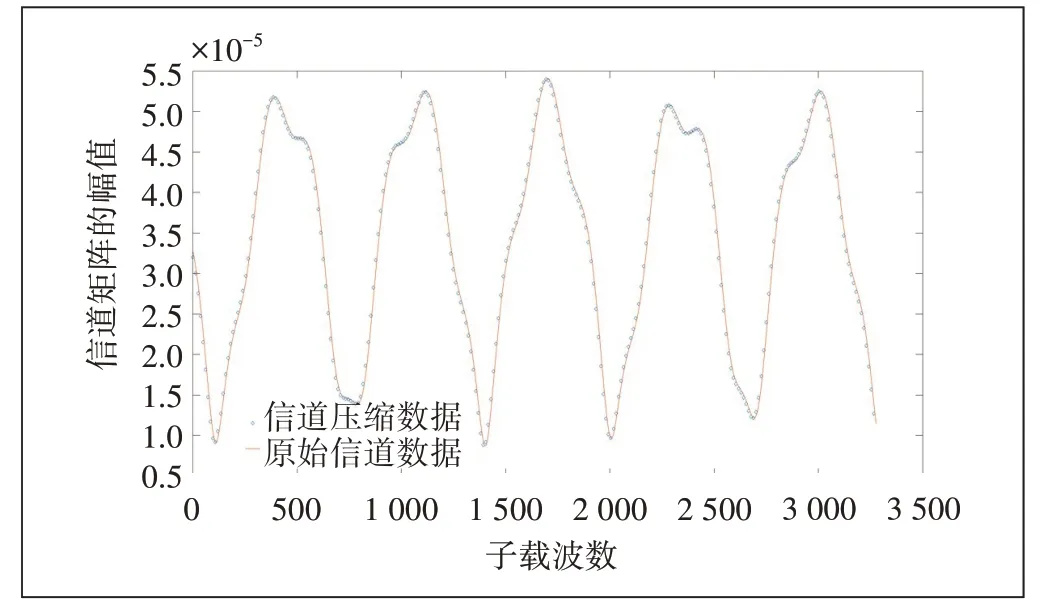
图6 信道压缩仿真
2.3 信道矩阵图谱
信道矩阵D是复数的形式,代表的是IQ 2路数据,信道矩阵D可以表征信号的幅值和相位信息。在这里本文对相位信息进行归一化处理表示为信道图谱的像素,得到的信道图谱如图7所示。
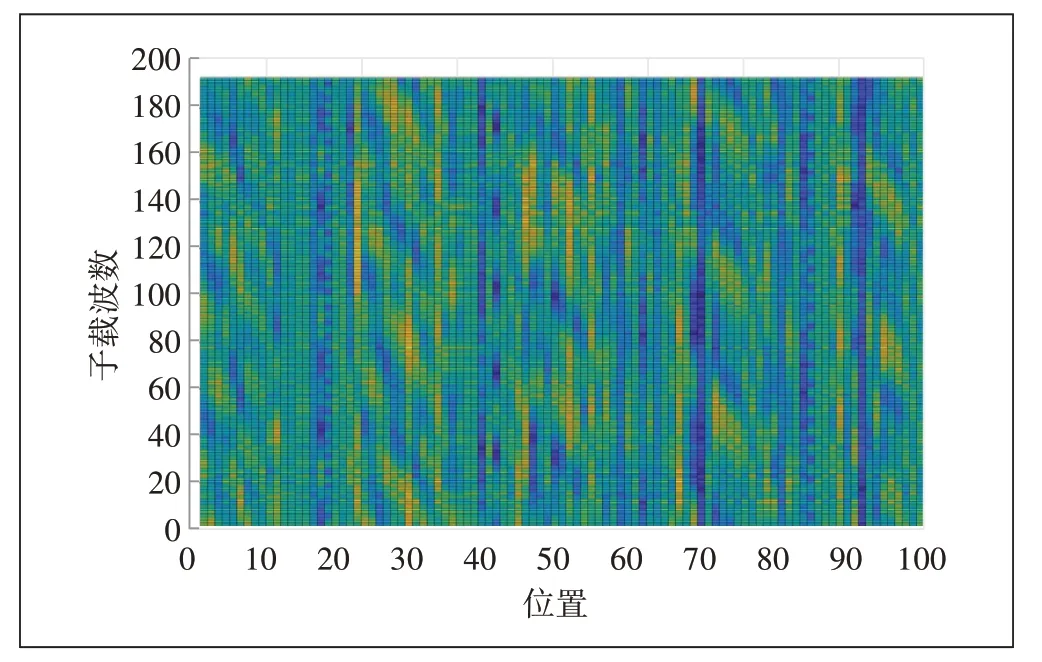
图7 信道图谱
图7所示为100个不同位置的信道图谱,从图7中可以看出,在不同的位置,反应的像素是不相同的。
由于设备和线路会引入固定误差φ0,采集到的信号实际为:
导致信道图谱存在噪声干扰,为了消除这种误差,在测距时引入了标定点,当标定点距离收发天线较近时,条件较理想,即认为标定点多径影响很弱,可忽视多径存在,接收到的CSI相位角为:
待测点距离收发天线较远时,经过多径的叠加,接收到的CSI相位角为:
其中,△d为待测点LOS 径与标定点的LOS 径的距离差,△dk为待测点第k条多径的径长与标定点LOS径的距离差,则待测点与标定点之间的相位差可以表示为:
从式(10)可知,将待测点与标定点的相位做差,消除了由设备和线路引入的固定相位误差φ0,得到完全由待测点与标定点相对传播距离差导致的相位,基于此可以消除一部分图谱噪声。
2.4 建立信道图谱和位置关联模型
信道模型构建如图8所示。

图8 信道模型构建
构建训练数据库的步骤如下。
a)UE 在不同位置发送SRS 信号,基站侧进行信道估计得到信道矩阵,并对信道矩阵进行压缩得到信道压缩矩阵。
b)提取信道矩阵的相位信息得到信道图谱。
c)将信道矩阵D的幅值信息进行归一化处理,表征为图像的深度信息,将二维图像映射为三维图像,将信道图谱映射到三维空间中,作为后端卷积神经网络[14]的输入。
d)将信道图谱输入到3D 卷积神经网络[15]进行训练,通过在CNN 的卷积层进行3D 卷积运算,捕捉时间和空间维度上的特征信息,3D 卷积神经网络的输入为多个连续帧组成的信道图谱,然后在信道图谱上运用3D 卷积实现较短序列数据特征提取,3D 卷积神经网络架构包含1个输入层、3个3D卷积层、2个3D下采样层和1 个全连接层。在输入数据前端用1 个固定的输入层对原始的数据进行处理,产生多个通道的信息,然后对多个通道分别进行3D 卷积及3D 下采样处理,以提取出输入数据中短时间片的序列信息。最后再将所有通道的信息通过全连接层组合在一起,实现信道图谱最终的特征描述。
e)采用长短期存储模型(LSTM)构建RNN 模块[16],网络架构如图9所示。

图9 LSTM网络架构
LSTM 中存在4个神经网络层,以“门”的结构形式存在,主要包括输入门、输出门、遗忘门和更新门。其中,输入门控制不同时刻输入LSTM 单元的外界信息,如式(11)所示。输出门控制不同时刻LSTM 单元的输出信息,如式(12)所示。遗忘门控制LSTM 单元在不同时刻丢弃信息,如式(13)所示。更新门控制LSTM单元更新内部存储信息,如式(14)所示。
其中,it为输入门输入信息,ot为输出门的输出信息,ft为遗忘门的输出信息,gt为更新门的输出信息。式(11)中θxi为当前时刻外部输入信息xt所对应的权重变量,θhi为上一时刻状态信息所对应的权重变量,bi为输入门的偏执变量。
f)CTC 网络首先将神经网络的输出映射到位置序列的条件概率分布上,然后为输入序列选出最可能的位置序列。RNN 层输出是一组属于各类的概率值,CTC 网络设计了一种结构化损失,建立了输入序列和输出序列的映射法则,CTC 损失函数即表示RNN 层输出的概率值通过CTC 层映射后与样本(位置序列)之间的差异。
在线定位阶段:
a)待测目标站在测试参考点,基站侧根据待测目标发送的SRS参考信号进行信道估计得到信道矩阵。
b)提取信道矩阵的幅值和相位信息得到三维信道图谱。
c)将三维图谱输入到训练好的模型中得到待测目标的位置信息。
3 5G+北斗融合定位技术
在室内环境下可以采用基于信道图谱的5G 定位方法。在城市、矿井、树林等有遮挡的环境中,由于卫星信号受到遮挡时衰减严重,终端可视北斗卫星数目不足4 颗,这时加入5G 基站的测量数据参与定位解算就可以弥补卫星不足的情况。这也就是北斗+5G联合定位系统的应用场景。5G定位与北斗定位进行融合,采用最小二乘拟合的算法来处理测量数据,建立北斗+5G 联合定位模型,利用分析结果加上最小二乘算法[17]进行迭代计算,当收敛误差小于判决门限时即为最后定位结果。融合定位解算流程如图10所示。
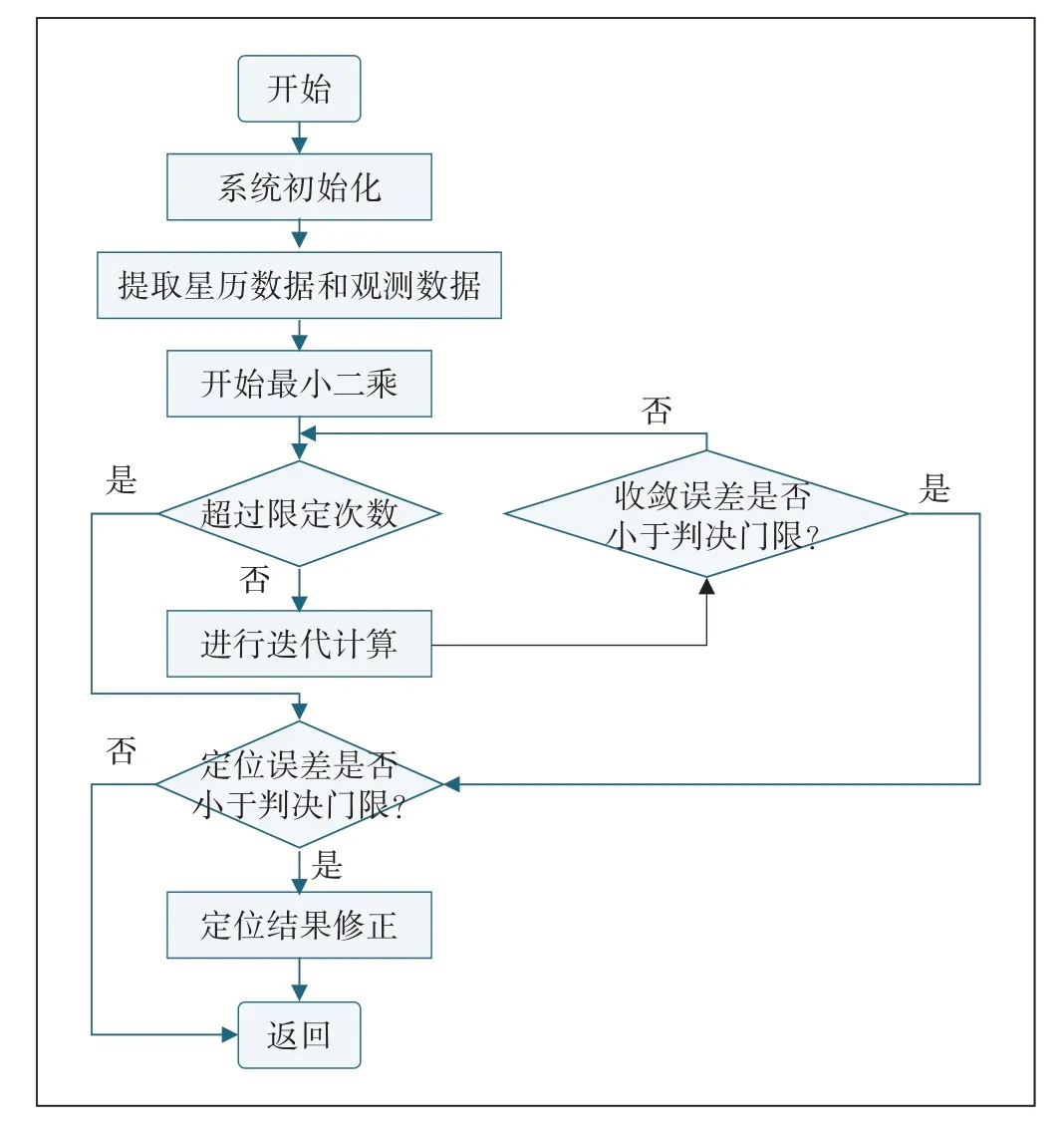
图10 5G+北斗融合框架
为了构造联合定位模型,在得到5G的定位结果以后,可以得到待测用户与基站之间的角度信息θ,5G基于AOA的定位模型如式(15)所示:
其中θ表示终端与基站之间的方位角,(xi,yi,zi)是基站的实际位置,(x,y,z)是终端定位坐标。
北斗卫星导航系统基于TOA 估计进行操作,以确定用户位置。在一般情况下,利用3颗卫星就可组成3个基于星站距离的公式,组成方程式就可解算出用户观测站的空间位置(x,y,z)。在现实定位的过程中,卫星时钟与接收机时钟存在偏差,把误差作为未知量一起进行计算,如式(16)所示:
其中,ρi表示卫星到接收机的空间伪距,(x,y,z)是待求卫星接收机的坐标,δ为卫星时钟与接收机时钟之间的误差。
建立联合定位数学模型如下:
用观测向量的形式描述定位模型如下:
对函数h进行全微分可得:
其中,H为h的雅可比矩阵。
根据式(19)可知dY与dX满足线性关系,且X中待求向量个数小于Y中观测向量个数,采用最小二乘法中的高斯—牛顿迭代法,它的基本思想是使用泰勒级数展开式去近似地代替非线性回归模型,然后通过多次迭代,多次修正回归系数,使回归系数不断逼近非线性回归模型的最佳回归系数,最后使原模型的收敛误差平方和达到最小,通过多次迭代,当收敛误差小于判决门限时,得到的结果即为联合定位的最终结果。仿真结果如图11所示。
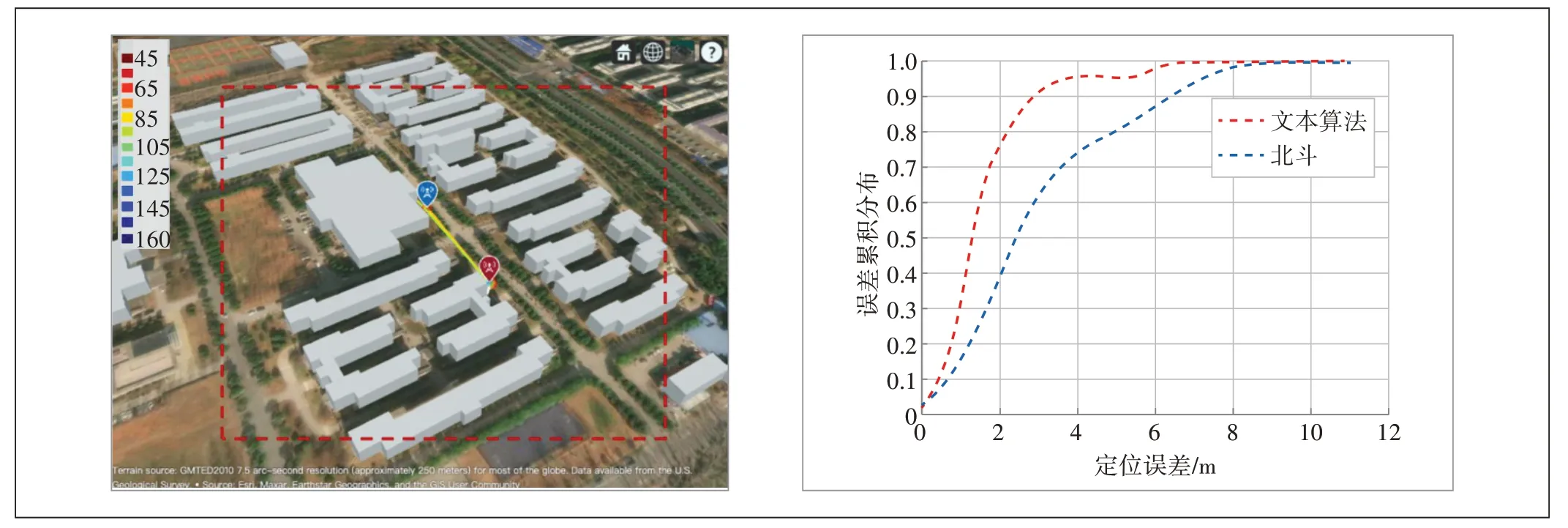
图11 仿真区域及仿真结果
4 结论
5G 使用了更大的频率带宽,为高精度定位提供了有力的支撑。本文提出的基于信道图谱的5G+北斗融合定位算法,将基于5G 的网络定位与北斗定位相融合,在只有单射频天线的情况下,即可在室内环境下,利用信道矩阵将5G定位问题转化为图像识别问题,利用3D卷积神经网络将信道图像和位置信息关联起来,满足室内高精度定位的需求,同时也可在室外环境下,基于5G+北斗联合定位模型,利用5G 的定位结果来辅助北斗进行定位,从而弥补北斗在遮挡条件下定位性能的不足,大幅度拓展北斗应用场景。
猜你喜欢
军事文摘(2023年20期)2023-10-31
小哥白尼(神奇星球)(2022年3期)2022-06-06
少先队活动(2020年12期)2021-01-14
当代陕西(2019年18期)2019-10-17
中成药(2017年3期)2017-05-17
太空探索(2016年3期)2016-07-12
领导科学论坛(2016年9期)2016-06-05
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
华东理工大学学报(自然科学版)(2015年4期)2015-12-01
电子设计工程(2015年8期)2015-02-27
