动力定位船舶推进器的偏置组合设置
2023-12-18 12:16王靖凯刘国增邹晓东逯鹏涛
江苏船舶 2023年5期
陈 帅,王靖凯,刘国增,邹晓东,徐 建,逯鹏涛
(中海油深圳海洋工程技术服务有限公司,广东 深圳518054)
0 引言
随着世界经济的不断发展,国家对能源的需求持续增加,海上油气资源的开发进程由浅海向深海推进,因此动力定位船舶逐渐成为海洋开发及海上设备设施工程作业的主要作业载体,其动力定位功能可为海上精准施工提供稳定的平台。
动力定位系统通过中央处理器给各推进器分配推力指令,以抵抗外界环境扰动对船舶位置及艏向的影响,从而达到定位目的。现阶段大部分主流定位系统软件中,推进器设置均有多种模式可供操作者按需选择。当外界环境因素较小时,环境扰动变化率会相应增大(如推进器选择自由模式将导致全回转推进器方位变化频繁),同时由于机械结构的反应比电子信号滞后,从而产生船舶定位偏差。
针对以上问题,本文将对全回转推进器成组进行偏置设置,使其推力相互抵消,且方位角保持在相对固定的范围内,从而直接减小因机械结构反应滞后导致的船位偏差,并减小推进器机械部位因频繁变换角度造成的过度磨损。
1 动力定位船舶简介
动力定位(Dynamic Positioning,DP)工程船的基本工作原理是:利用船舶的各类传感器、罗经和位置参考单元并通过卡尔曼滤波器收集船舶的运动状态、位置变化、环境风力大小和方向,通过DP控制器(DP Controller,DPC)构建船舶数学模型,控制系统发出一系列的推力指令控制推进器,形成一个时变的推力系统,以抵消外在的时变的环境载荷,从而使船舶保持在目标船位和艏向[1](见图1)。
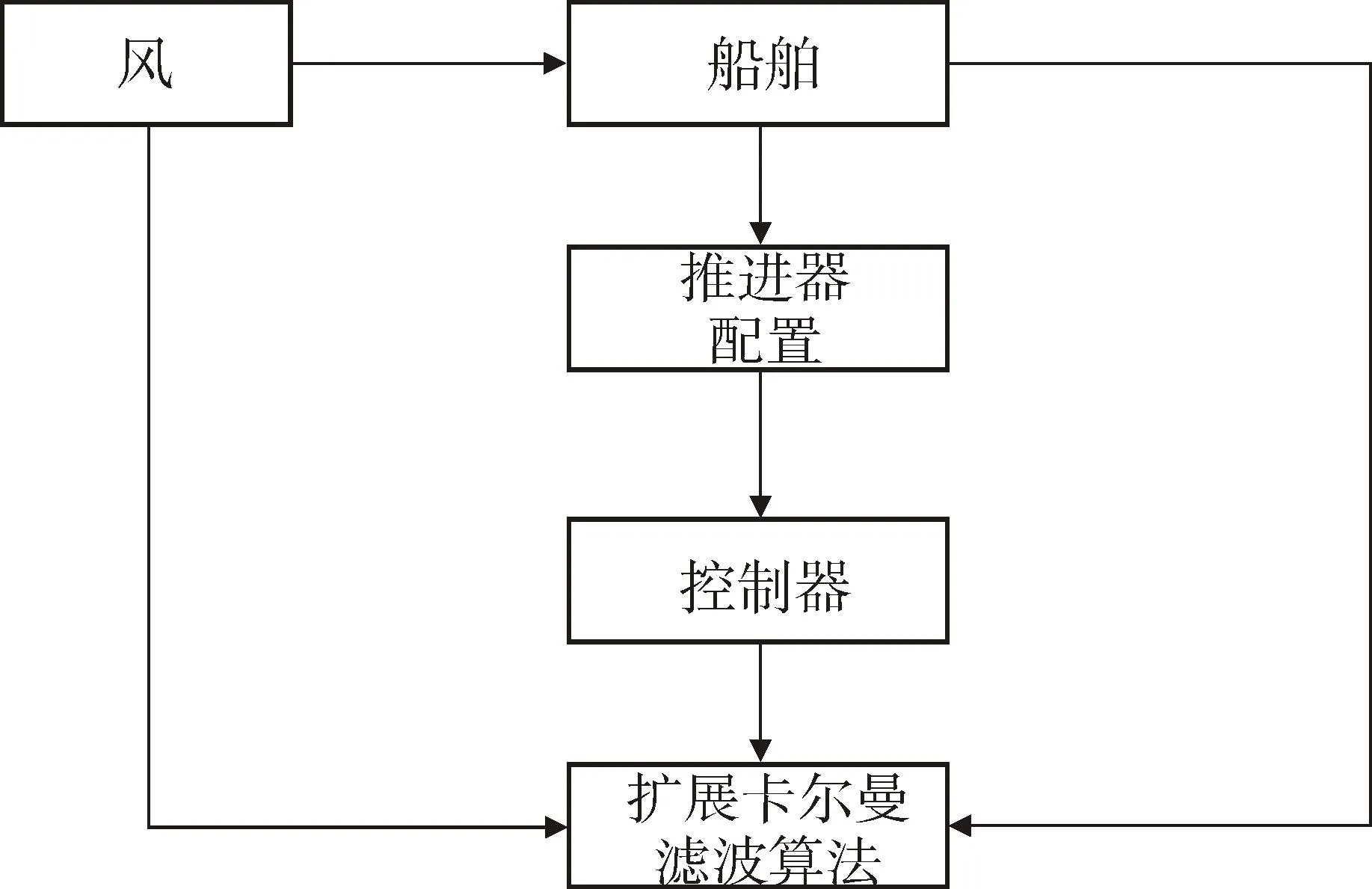
图1 动力定位系统工作原理图
船舶有6个自由度的运动,即3个平移运动和3个旋转运动,这其中包括:纵荡、横荡、垂荡、转艏、俯仰和滚转。动力定位系统负责船舶纵荡、横荡和转艏3个自由度的自动控制[2]。
2 推进器偏置理念
动力定位系统通过中央处理器向推力分配单元发布3个自由度(纵向、横向和转艏)指令,再经推力分配单元进行算法优化后,将推力和角度指令分配给各个推进器[3]。推力分配单元处在动力定位系统的最末端,对船舶定位的精确性、灵活性起着至关重要的作用[4]。推进器的偏置组合设置即是将全回转推进器按组分配,并使组合后推力合力与环境因素影响合力效果为零。当船舶处于环境力较小而推进器推力方向频繁变化的定位作业时,采用常规的推进器分配方案会导致推进器的方位角频繁变化,而且由于推进器本身的机械特性,方位角转动速度有限,方位变化跟不上中央处理器指令的变化而导致动力定位系统的方位角预测频繁报警。同时也可能出现方位角滞后而影响船舶的定位精度,频繁的推进器方位变化也会增加其转向机构的磨损。
针对这个问题,康士伯格(Kongsberg)集团提出了偏置理念,即对配置全回转推进器的动力定位船舶的推进器进行分组设置,允许推进器之间推力相互抵消。这种方法虽然会消耗推进器的功率,但可以提高推进器对于处理器给出指令的反应速度,避免推进器频繁转向而降低定位精度及加速推进器磨损等问题,在实际工程中有重要应用价值。动力定位船舶的推进器通常是最主要的电力消费者,应根据外界环境因素和项目对于定位的要求,合理、灵活设置推进器的偏置组合,从而满足推进器推力分配对船舶作业定位精度的要求。
3 推进器偏置设置
在使用偏置功能时,推力、转向因数和角度因数的设置需要人工干预。在无偏置时,各推进器按照动力定位控制系统推力优化算法优化后的方位和推力指令运行,原则上是最省功率消耗的模式。但是在特定情形下,需要对推进器组进行偏置设置并以此达到提高定位精度或减少机动部位磨损的目的。偏置各项参数设置见表1。
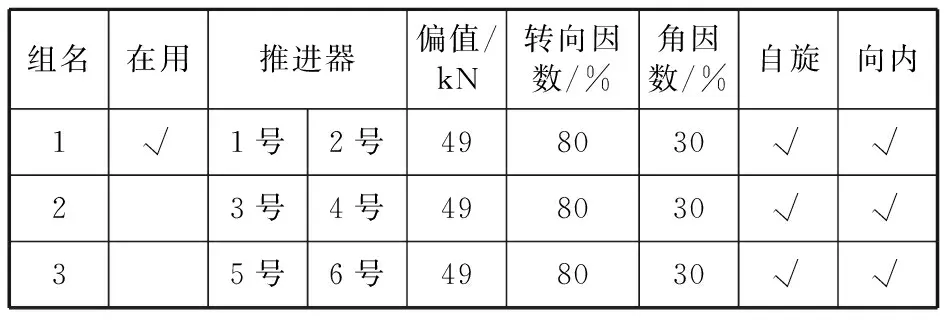
表1 推进器偏置设置
推进器偏置各项参数设置方法如下:
(1)对推力的设置。首先选择偏置的推进器组,设置推力的大小。环境力较大时,推力值不宜设置过大,设置一个较小的对推力就能实现对推,避免对推消耗过多功率;反之,环境力较小时,推力值可以设置大一些,从而提高位置及艏向的稳定性。
(2)转向因数的设置。转向因数设置的大小是指操作员需要推进器组脱离偏置模式的时刻。脱离时间需要考虑船舶本身可分配的电力储备冗余,如果自身电力充足,该值可以设置大一些。如果操作员不担心任意一台推进器大负荷工作会导致动力定位控制系统或是电站管理系统启动自动减载功能,同时也不担心环境力矩会超出推进器组中任一推进器的最大推力力矩,则转向因数大小并不重要。但是在实际作业中,为应对环境力突变或激增,该值不应设置过大。通常,当推进器组中任一推进器推力超过其最大推力50%时,另一推进器应脱离偏置以共同抵抗环境力的影响;当各推进器推力反馈小于50%时,推进器组重新回到偏置对推模式。
(3)角度因数的设置。角度因数指的是推力可用情况下角度与推力的优先权重,它不是一个量化值。可以把角度理解为对推的角度,推力理解为控制系统优化的推力方向。该值设置的越大,推进器组中的推进器推力方向更倾向于对推的角度(横轴方向)。在相同外力作用下,为获得相同的纵轴推力,则必然要增加推进器负载,以牺牲功耗来增加船舶的阻尼力,从而保证位置及艏向的稳定。在实际应用中,如果外力较大且方向较稳定,不建议设置过大的角度因数。反之,在外界环境力较小或是方向多变时,可以设置较大的角度因数,限制推进器方位旋回的范围,从而减少机动部位磨损。
4 推进器偏置实际应用
某工程船的主要参数如下:
船长125.0 m,船宽25.0 m,吃水6.7 m;电力源为6台2 880 kW柴油发电机,艉部2台4 500 kW全回转推进器,艏部2台2 000 kW伸缩全回转推进器,艏部2台2 000 kW管隧推进器,动力定位作业时2组配电板各有1台发电机在线。
环境参数如下:海流来向247°,流速1.2 kn,风向262°,风速12 kn;艏向240°。
实际测试时,左右艉主推设置为偏置,对推力为1 kN,转向因数为50%。分别将角度因数设置为20%、30%、40%、50%、60%、70%来比较艉推进器方位角变化及转速变化,见表2。
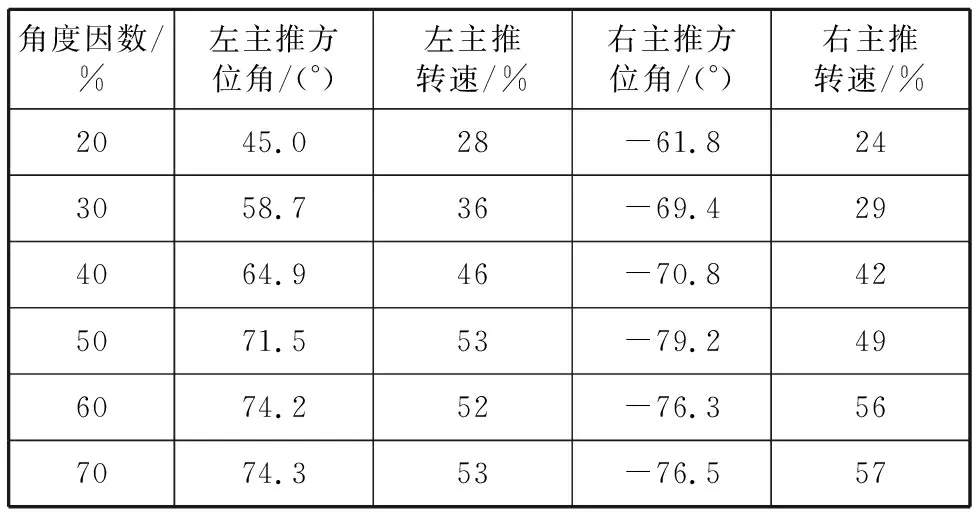
表2 推进器方位角及转速表
由表2可以看出,外界环境不变时,角度因数值越大,推进器方位角越接近横轴对推方向,同时提高转速以提供同等纵轴方向推力。
同样的,船首稍斜顶风流保持船位,驳船近靠本船下风流舷进行货物穿梭作业时,为减小本船靠近驳船一侧的主推进器排出流对驳船的影响,将角度因数设置为较小值,艉主推进器横向排出流明显减小并朝向船尾稍偏下风流侧,推进器方位更趋向纵轴抵抗来自船首的受力。
当船舶到达工区进行动力定位检查时,有一项测试内容为备用发电机的自动启动。如果需要在船舶位置不变的情况下进行测试,可以逐步提高对推力的大小,并且增大角度因数,从而增加发电机负荷,达到备用发电机启动限制和设置延时以后,完成自动启动,在保持船位的同时完成测试。
综上所述,使用偏置设置可以使方位推进器回旋显著减少,并有效解决功率和方位改变的非线性变化。以下就是比较典型的应用场景:
(1)当角度和推力设定值改变时减少全回转推进器旋转的反应时间,从而提高推进器对指令的反应能力,间接提高船舶定位精度。
(2)如果一组的推进器不能零位,另外同组的推进器可设置同样的反推力来抵消不能归零所带来的影响。
(3)在天气好的时候,推进器会来回旋转,最后出现推进器方位预测报警。
(4)当发电机需要高负荷运转的时候,可提高对推力,从而提高发电机的负荷。
(5)增加船舶的阻尼力,从而提高船舶位置及船首向的稳定性。
5 结语
综上所述,通过对推进器偏置设置原理及参数设置的深入解析,以及某动力定位船舶设置实例数据显示,推进器偏置功能是在推力分配优化算法功能之中的特殊模式,满足了不同作业工况的不同推力需求并结合了对推进器机动部位磨损的考量。通过实际使用过程中关于偏置设置的一些经验和做法,特别是在环境力较小、频繁小范围移位定位作业时,合理设置推进器有利于提高船舶定位精度,减少设备损耗。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
中国信息化(2022年5期)2022-06-13
舰船科学技术(2021年12期)2021-03-29
卷宗(2021年2期)2021-03-09
空间科学学报(2020年4期)2020-04-22
当代陕西(2018年12期)2018-08-04
北京航空航天大学学报(2016年6期)2016-11-16
河南科技(2015年18期)2015-11-25
学习月刊(2015年10期)2015-07-09
电子设计工程(2014年19期)2014-02-27