基于反步非奇异终端滑模的PMSM速度控制
2023-12-28 10:11朱敦滨张金亮简炜彭国生贺正豪
湖北汽车工业学院学报 2023年4期
朱敦滨,张金亮,简炜,彭国生,贺正豪
(1.湖北汽车工业学院电气与信息工程学院,湖北 十堰 442002;2.东风汽车动力零部件有限公司,湖北 十堰 442002)
为了提高永磁同步电动机(permanent magnet synchronous motor,PMSM)系统的控制效果[1],越来越多的控制方法被应用于PMSM 控制,如滑模控制[2]、模型预测控制[3]、自抗扰控制[4]、神经网络控制[5]、智能控制[6]和反步控制[7]等。滑模控制通过切换项实时调节系统的动态性能,对于外界干扰反应不敏感,因此成为研究热点[8-9]。文献[10]在速度环设计全局快速终端滑模控制器,能够在一定程度上削弱抖振,提高系统鲁棒性,但存在奇异性问题,无法对扰动量进行观测和反馈补偿,当系统受到较大干扰时无法保证系统的控制精度。文献[11]提出了自适应非奇异快速终端滑模控制方法来抑制不确定因素的影响,避免了奇异性,保证了系统跟踪误差在有限时间内快速收敛,且削弱了抖振,但抗干扰能力有限。反步控制是非线性递归控制方法,对于电机驱动系统,可以将复杂的非线性机电控制系统分解为多个子系统,构造Lyapunov函数推导出控制律,通过递归计算和引入虚拟控制变量来实现速度的跟踪效果,确保了全局渐近稳定性[12-13]。根据上述分析,文中提出了基于扰动观测器的反步非奇异终端滑模控制策略。结合反步控制的渐进稳定性和非奇异终端滑模控制的快速收敛性设计了新型PMSM单回路非级联控制器,有限时间扰动观测器估计外部负载扰动,对扰动进行补偿,使系统具有较强的鲁棒性。
1 PMSM的数学模型
根据磁场定向控制原理,建立PMSM同步旋转坐标系下电机动态模型:
电机运动方程可描述为
针对表贴式PMSM,d轴和q轴电感相等。此时同步旋转坐标系下的电磁转矩为
式中:ud、uq为定子电压;id、iq为定子电流;Ld、Lq为定子电感;R为定子电阻;ω为机械角速度;ψf为永磁体磁链;J为转动惯量;TL为负载转矩;Te为电磁转矩;Pn为极对数;B为阻尼系数。
2 改进滑模速度控制器的设计
在传统PMSM 控制中通常采用电流内环和速度外环的串级控制结构,文中采用了新型PMSM单回路非级联控制器取代速度环和电流环,简化了控制器结构,控制系统结构如图1 所示。新型PMSM单回路非级联控制器,包括q轴控制器和d轴电流控制器,采用反步非奇异终端滑模控制实现其控制功能。定义状态变量:

图1 PMSM反步非奇异终端滑模控制系统框图
对式(4)求导可得:
式中:F为系统总扰动。定义速度跟踪误差:
式中:ω*为参考转速。基于Lyapunov 稳定性理论设计了反步控制策略,并通过构造Lyapunov 函数推导了控制律。选取的Lyapunov函数为
结合式(7)~(8)可得:
式中:b为正常数。选择虚拟控制的输入:
结合式(9)~(10)可知V˙1小于等于0,转速误差逐渐收敛。根据递归原理,定义第2个状态误差变量:
采用非奇异终端滑模控制方法,选择滑模面:
式中:c1、p1、q1为自定义参数;p1、q1为大于零的正整数。由于sgn()具有不连续性,容易产生抖振,为了削弱影响,文中采用v(s)代替sgn()作为新的控制函数。v(s)可以表示为
式中:m为正常数。选择滑模控制的指数趋近律:
式中:d1、d2为滑模控制增益。联合式(12)~(14)可得q轴电流控制器的输出:
选取的Lyapunov函数为
结合式(14)~(16)可得:
由式(17)可知,提出的反步非奇异终端滑模控制器满足Lyapunov 稳定判据,系统可在有限时间内收敛。定义d轴电流误差:
式中:c2、p2、q2为自定义的参;p2、q2为大于零的正整数。选择滑模控制的指数趋近律:
式中:d3、d4为滑模控制增益。结合式(18)~(20)可得d轴电流控制器的输出:
选取Lyapunov函数:
结合式(20)~(22)可得:
由式(23)可以看出设计的控制器满足Lyapunov 稳定性定理,因此d轴电流将收敛到零,所设计控制器具有良好的鲁棒性。
3 扰动观测器的设计
在q轴电流控制器中存在因负载转矩变化引起的干扰,影响控制器的稳定性。滑模控制对电机运行中的扰动具有较强的鲁棒性,但单环控制器不能有效抑制扰动。为提高系统的抗干扰能力和控制精度,设计了扰动观测器,利用实际值与估计值之间的误差对扰动进行修正:
式中:β为扰动观测器的增益;F̂为扰动估计值。观测扰动量的误差:
根据经验可知扰动量的变化是缓慢的,因此Ḟ等于0。结合式(24)~(25)可得观测误差的动态方程:
通过对β取值使得F̂按照指数形式逼近F,即F͂趋近于零。为避免式(26)微分计算时放大噪声信号,在观测扰动变量时引入中间量V,得到新的扰动观测器:
4 仿真结果与分析
在MATLAB/Simulink 中搭建控制系统,对3 种不同的控制方式进行仿真比较,验证文中控制策略的有效性。方案1为矢量控制,方案2为传统滑模转速控制,方案3为反步非奇异终端滑模控制和扰动观测器控制。电机的额定转速为1000 r·min-1,仿真时长为1 s,在0.5 s 时加入10 N·m 的负载转矩。全局仿真模型见图2,其中电机参数见表1。
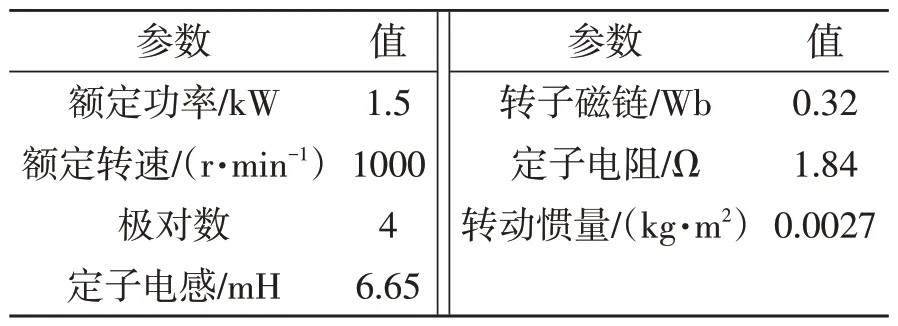
表1 电机相关参数

图2 全局仿真模型
图3为3种方案下电机转速响应曲线和q轴电流响应曲线。由图3a可知,方案1~3控制下的电机在启动时转速分别超调了50 r·min-1、265 r·min-1和7 r·min-1,在0.5 s 时增加电机的负载,电机转速分别下降了65r·min-1、162.5 r·min-1和14 r·min-1,电机恢复到稳定转速的时间分别为0.52 s、0.55 s 和0.515 s。由图3b可得,当系统负载受到扰动时,方案3对q轴电流的影响比方案1~2小,方案3控制下的电机能快速达到系统给定转矩。虽然方案3的d轴控制器未考虑扰动,但d轴电流在零附近振荡,说明方案3 的控制器具有良好的电流控制性能和较强的鲁棒性。

图3 不同方案下电机转速及q轴电流响应曲线
为了验证方案3 在参数变化情况下系统的鲁棒性,在实验中将磁链和电感参数分别增加和减少30%,观察电机转速响应曲线。方案1~3的参数变化时电机转速响应曲线如图4 所示。通过图4 可得,当磁链增加30%时,方案1~3 的启动时转速分别超调100 r·min-1、260 r·min-1、20 r·min-1,加载后转速分别下降90 r·min-1、160 r·min-1、14 r·min-1;当磁链减少30%时,方案1~3的启动时转速分别超调35 r·min-1、380 r·min-1、5.6 r·min-1,加载后转速分别下降100 r·min-1、200 r·min-1、7.5 r·min-1。当电感增加30%时,方案1~3 的启动时转速分别超调70 r·min-1、305 r·min-1、4.6 r·min-1,加载后转速分别下降80 r·min-1、164 r·min-1、18.1 r·min-1;当磁链减少30%时,方案1~3 的启动时转速分别超调了40 r·min-1、234 r·min-1、7.5 r·min-1,加载后转速分别下降50 r·min-1、155 r·min-1、8 r·min-1。

图4 参数变化时不同方案的电机转速响应曲线局部放大图
为验证设计的扰动观测器的性能,实验中电机启动时的负载为3 N·m,在0.5 s时负载增大为10 N·m,在0.8 s 时负载减小为6 N·m。图5 为电机三相电流曲线图和扰动估计曲线。由图5a 可知,三相电流幅值与电机转矩保持一致且成正比例关系,当电机转矩发生变化时,电流随之改变。由图5b~c 可知,设计的扰动观测器可以快速稳定地跟踪系统外部扰动,当系统负载受到外界影响而发生突变时,扰动观测器依旧可以快速的跟踪扰动变化,将扰动估计量反馈至反步非奇异终端滑模控制器,增强了系统的抗干扰能力。

图5 电机三相电流曲线及负载扰动估计曲线
5 结论
文中提出了基于扰动观测器的反步非奇异终端滑模控制策略,对PMSM进行转速控制。设计了速度控制器和扰动观测器,对PMSM系统中的干扰进行估计并补偿。仿真结果证明,与矢量控制和传统滑模控制相比,设计的控制策略对扰动具有渐近稳定性和鲁棒性,能够有效提高系统控制精度,加快收敛速度,减小固有抖振,提高稳定性。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2019年4期)2019-10-10
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
贵州师范学院学报(2016年3期)2016-12-01
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电源技术(2015年11期)2015-08-22
电测与仪表(2015年19期)2015-04-09