一种多天线北斗导航定位技术的标定方法
2023-12-29 03:56田相才王怀志
港口装卸 2023年6期
田相才 王怀志
上海振华重工(集团)股份有限公司
1 引言
随着无人驾驶和智能化发展的逐渐成熟,国内已建成多个高度智能化的自动化码头,例如厦门远海自动化码头、青岛新前湾自动化码头、洋山四期自动化码头等。上述码头的自动化导引车都采用磁钉导航技术,需要在港口水平运输区域的地面埋设大量的磁钉,对于码头基建要求较高。分布在车辆前后端底部的定位磁钉天线价格昂贵,维修成本也比较高。随着老码头升级改造成自动化码头需求的日益增长,磁钉定位方案已经不适用。
为解决以上问题,设计一种自动化码头导引车(以下简称IGV)车载组合定位系统的标定方法。该方法有效利用PDCA质量改进方法工具,提升标定质量;标定成功后,可以利用北斗导航系统与惯性导航组合的方式与里程计信息输入融合,最终获得稳定可靠的高精度导航定位信息。
2 组合定位系统技术
卫星惯性导航组合定位系统主要是指卫星导航、惯性导航与里程计三者的信息融合[1]。在自动化码头实际作业中,北斗卫星导航技术采用高精度的RTK(Real Time Kinematic,实时动态)定位技术,在IGV中心位置部署数据传输模块,可以实时从网络获取码头基准站的差分数据,结合分布在IGV 4个角的天线数据,通过卫星导航板卡计算,最后解算输出精度达2~5 cm的RTK定位结果。其中卫星导航天线与板卡的配置结构关系见图1。
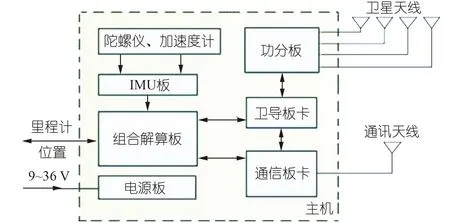
图1 卫星导航设备整机框图
在卫星导航更新时刻,融合单元会通过卡尔曼滤波算法[2]修正惯性导航设备的误差,并对里程计等外部输入的刻度因数进行估计,其余时刻惯性导航设备进行机械编排来获取设备位置、速度和姿态的变化量;在车辆静止时,融合单元会使用零速修正算法,对各种误差进行修正;当IGV车辆行驶在卫星导航信号质量较差区域时,融合单元会利用车前向和侧向输出的速度信息,与惯导设备计算的行进速度融合,从而有效抑制误差发散[3]。
3 多天线定位设备安装与计算
3.1 单天线卫星惯性导航组合设备
为了对比分析卫星惯性导航组合定位系统的性能,在相同惯导器件的情况下,选择单天线版本在开阔环境进行跑车测试,未进行里程计融合。经过测试,单天线卫星惯性导航组合设备在开阔环境下,航向与基准的误差不超过0.28°,定位结果与基准位置的误差在25 cm以内。如果在码头的堆场和装卸作业区域,导航性能会更差,不能满足港口IGV的运行要求,故采用多天线布置方案。
3.2 多天线定位设备安装
在IGV的车体4个角安装卫星天线,将相应的卫星天线电缆连接到卫星天线的TNC插座上。因为车辆和卫星天线支架存在加工误差,为保证卫星定向结果与车辆方向一致,需要在安装卫星天线之后对卫星天线支架进行调整。借助全站仪或者其他设备,将左前左后卫星天线的连线与车辆一侧的方向偏差调整到0.1°以内。卫星天线支架安装位置,要与车体保持安全距离,防止异常情况下被放下的集装箱砸坏。
3.3 中心坐标计算
设备内接收机能够获取4个天线在大地坐标系下的高精度定位。车辆静止时,采集一段时间的静态定位数据,然后采取平滑后的定位数据作为准确定位。假设天线的坐标为:左前天线(x1,y1)、左后(x2,y2)、右后(x3,y3)和右前(x4,y4)。计算相邻两点的距离p1、p2。最后以矩形中心(即设备安装位置)为原点,确定4个天线的杆臂坐标值,左前天线杆臂(p1/2,-p2/2)、左后天线(-p1/2,-p2/2)、右后天线(-p1/2,p2/2)和右前(p1/2,p2/2)(见图2)。
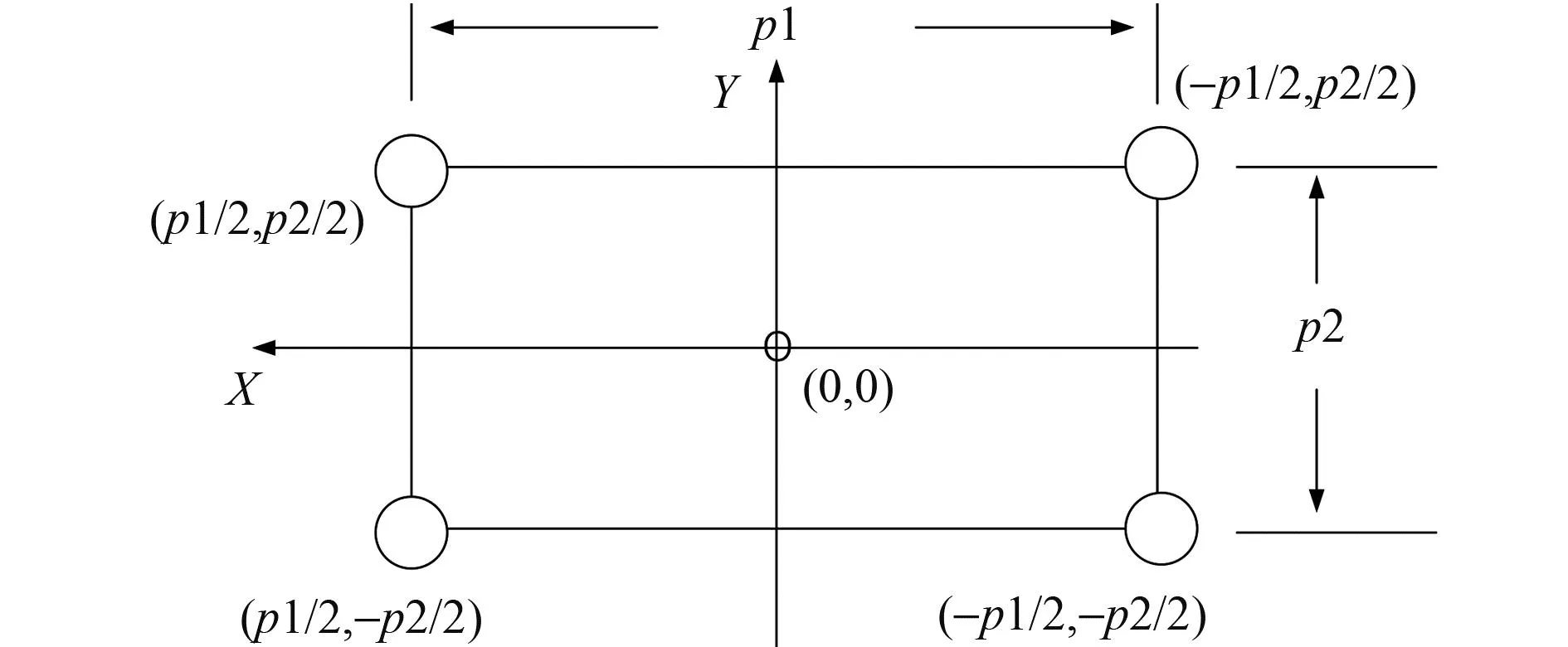
图2 尺寸示意图
只要在使用前完成4个天线的相对位置标定,即可在以后的使用中通过卫星定位得到4个天线的坐标,推算出精确的IGV车辆中心点坐标,实现可靠定位。
4 多天线安装标定
4.1 天线标定前
设备安装完成后,在正常使用前,需要进行卫星导航4个天线基线及夹角的标定。标定过程需将车辆停放在开阔区域进行,保证卫星导航4个天线无信号遮挡、干扰,并且整个过程保持车辆静止,以达到更高的标定精度。
4.2 天线标定中
在标定软件中查看卫星导航板卡RTK解状态,4个天线全部显示为绿色正常,否则为灰色。状态都显示正常后,将工作模式设置为标定模式,然后开始标定。从“天线标定开始”状态到“天线标定中”需等待大约60 s;天线标定中状态持续300 s,期间显示标定计数与时间信息,直到显示“天线标定完成”信息。
同时计算得到的参数如天线基线及夹角信息将在显示框中显示,确认参数后保存标定,可查看北斗解算状态(见表1)。解算状态若显示为1或2,则定位可信度较高,允许导引车IGV加入使用。
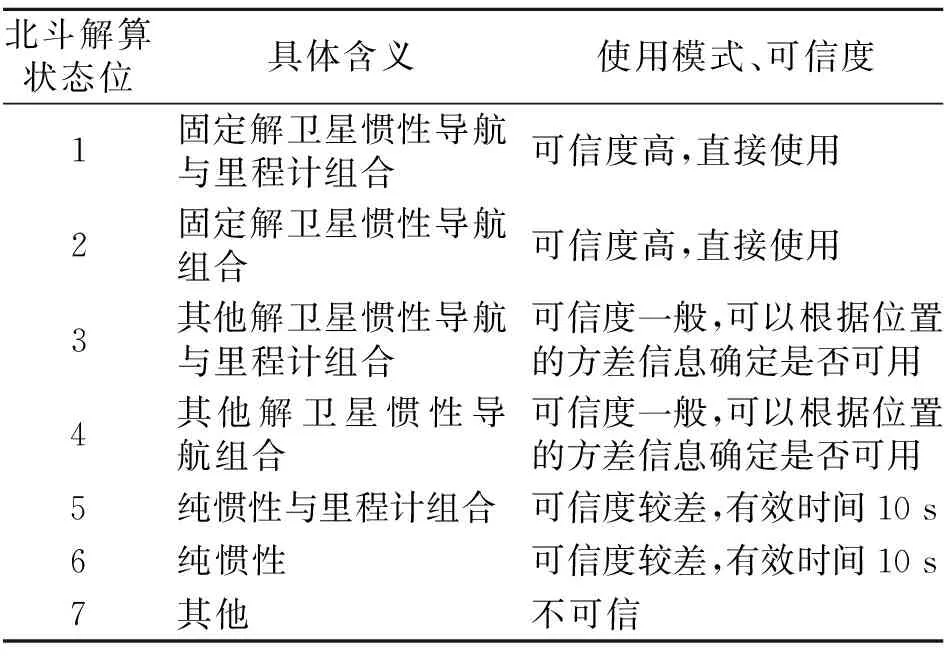
表1 北斗卫星解算状态表
4.3 天线标定后
根据方差判断定位精度,位置的方差越小,定位精度越高。在实际使用中可根据位置方差的大小来判断定位结果的精度,决定是否对其进行使用。表2显示卫星惯性导航定位结果的方差所对应的位置精度。
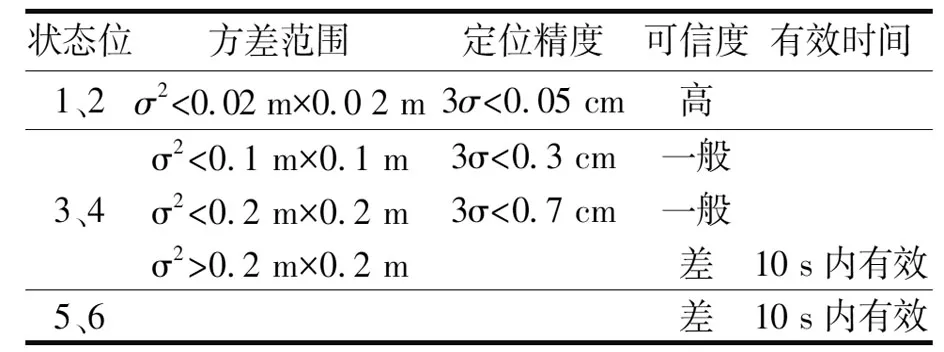
表2 卫星惯性导航定位结果方差状态位说明
表2中状态位的解释如下:1指卫星导航RTK结果为固定解,卫星惯性导航和里程计三者组合定位,输出精度高;2指卫星导航RTK结果为固定解,卫星惯性导航两者组合定位,输出精度高;3指卫星导航RTK结果为浮点解或单点解,卫星导航RTK输出精度不稳定,误差最大可达1~2 m;4代表其他解卫星惯性导航组合,指卫星导航RTK结果为浮点解或单点解,卫星导航RTK输出精度不稳定,误差最大可达1~2 m;5为纯惯性与里程计组合,指卫星导航无定位,惯导与里程计组合输出,位置保持精度:400 cm/5 s,航向0.5°/5 min;6代表卫星导航无定位,纯惯性推算,精度快速发散,发散速度约10 cm/s;除上述状态位以外,当组合出现异常,重新进入准备或对准状态。
4.4 标定结果
标定完成后,首先检查天线之间的夹角,4个角度分别为0°,90°±0.5°,180°±0.5°,90°±0.5°,说明天线夹角标定正确。然后查看解算状态(Status1),解算为1或2,定位精度比较高;最后检查定位坐标、横坐标、纵坐标,在航向静态情况下跳变幅度比较小,坐标复位小于3 cm,航向角幅度小于0.02°,即可认为标定合格。
5 结语
对复杂环境下自动化码头码头导引车IGV的北斗卫星惯性导航融合定位技术使用及其标定方法进行了介绍。该技术使用北斗高精度RTK位置、速度和定向信息,并且可以对惯性导航的位置、速度、航向等信息进行融合校正并估计其误差,最终输出可靠稳定的导航信息。
该方法标定过程节约人工和时间,标定成功后稳定性高,如果安装天线的位置没有发生变动,不需要再次标定。在某自动化码头IGV上对该方法进行实践应用,现场IGV可获得较高的定位精度,保证IGV作业的稳定性,提升了自动化集装箱码头的系统质量。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
军民两用技术与产品(2021年7期)2021-10-13
湖北农机化(2020年4期)2020-07-24
科技传播(2019年22期)2020-01-14
中国惯性技术学报(2019年1期)2019-05-21
传感器与微系统(2018年7期)2018-08-29
北京航空航天大学学报(2017年5期)2017-11-23
导航定位与授时(2016年6期)2016-03-16
卫星与网络(2016年12期)2016-02-05
西部广播电视(2015年7期)2016-01-16