
空间光学载荷悬臂轻巧型光机系统设计
2024-01-03 04:46谢新旺殷龙海李延伟李骏驰刘华秋郭奥钿
工程与试验 2023年4期
谢新旺,殷龙海,李延伟,李骏驰,刘华秋,郭奥钿
(季华实验室,广东 佛山 528200)
1 引 言
同轴光学系统是一种所有光学元件都处于同一光轴的光学系统,因其空间利用率高,广泛应用于遥感卫星[1-3]。同轴光学系统对各光学元件相对位置的要求较为严格,元件的光轴是否重合会直接影响成像质量,这对系统的设计提出了较高的要求。一方面,在保证主支撑结构尽可能轻量化的同时,还需保证结构的刚度,避免重力对元件相对位置产生影响;另一方面,要使系统在受到温度变化影响时具有较好的稳定性。因此,轻巧、高稳定性的同轴光机系统设计成为急需解决的技术难题。
传统同轴光学系统[4-6]的主支撑结构受力集中、稳定性较差,无法保证反射镜具有稳定的高面形精度。因此,在设计时需要对光学系统进行结构优化,国内外对于此问题已有相关研究。王泰雷等[7]以系统基频为目标函数,对某相机的钛合金主支撑结构进行了优化设计,优化后的主支撑结构重量为0.6kg,占整机重量的9%。王轩等[8]以轴向的热变形量为优化目标,对弹载光学系统的主支撑结构材料进行了优化,结果表明,碳纤维复合材料的热变形优于钛合金。张雷等[9]以重量为优化目标,对某卫星光学系统的钛合金主支撑结构进行了优化,优化后的光机系统质量仅为3.03kg。Kihm H等[10]将镜面设计和弯曲设计两个问题进行独立优化,完成了以钛合金为主支撑结构的轻量化反射镜组件设计。Park K S等[11]将能代表重力和抛光的压力载荷作用下面形精度的Strehl比作为优化目标,完成了以碳纤维为主支撑结构的轻量化主镜设计。
从相关文献可以看出,目前国内外同轴光学系统的主支撑结构多采用背部三点支撑式,这种结构难以实现二维旋转,且主支撑结构的材料多选择钛合金、碳纤维,对采用全SiC材料的设计未见相关叙述。
本文以某轻巧型同轴RC空间相机的主支撑结构设计为背景,设计了Φ400mm口径全SiC材料的悬臂轻巧型同轴光机系统。采用参数优化法,以反射镜面形精度与基频为优化目标、重量为约束条件,优化了系统的主支撑结构。通过数值仿真与试验,分析并检测了系统的基频和反射镜的面形精度,试验结果满足设计要求,验证了结构的合理性和有效性。本研究解决了轻巧型同轴光机系统的设计难题,获得了高轻量化、高稳定性的光机结构。
2 新型主支撑结构设计
2.1 结构设计
传统同轴光学系统采用的主支撑结构为的三点式背部支撑[12-14],这种支撑方式的结构刚度高,适用于无轴向自由度的光机系统。为增加卫星的成像幅宽、提高其机动性,在不改变卫星姿态的情况下改变相机的光轴指向,需要在主支撑结构上增加二维转台。若采用三点式背部支撑方法,会大幅增加系统重量和体积,无法满足设计要求。因此,本文采用了三点悬臂式的支撑结构,通过3条悬臂固定反射镜间的相对位置,使主反射镜与次反射镜的光轴在同一直线上,减小了反射镜背板的厚度,实现了同轴光学系统的轻量化。光学系统采用通光口径为Φ400mm的同轴RC光学系统,主要光学元件包括主反射镜、次反射镜、后光路透射系统等,结构如图1所示。

图1 系统安装示意图
2.2 材料的选择
材料的选择直接决定了整机系统的性能。为降低系统重量、保证系统稳定性,应综合考虑所选材料的弹性模量、密度、泊松比以及线膨胀系数。其中,材料的弹性模量、泊松比决定了系统在重力作用下的面形精度,而材料的线膨胀系数决定了系统在受温度载荷作用时的面形精度。目前,为减小重力和温度对整机系统面形精度的影响,常用于卫星光学系统主支撑结构的材料为碳纤维复合材料、殷钢和钛合金等,常见的光机结构材料属性如表1所示。

表1 常见的光机结构材料属性
该系统的主要承载为舱外载荷,外热流变化较大,通过热控设计,可以将整机及主支撑结构的温度控制在20±4℃以内。为了降低主支撑结构的温度变化对主镜面形、主次镜间隔、光路总光程等方面的影响,首选线膨胀系数与主反射镜材料相近的材料。由于主反射镜选用的材料为SiC,本主支撑结构的材料也选择SiC。
2.3 结构优化及仿真
为实现支撑结构的高刚度和轻量化,对该系统的主支撑结构的重量、反射镜面形精度RMS值和结构的基频着重考虑。选择反射镜面形精度和系统基频作为优化目标、以整机重量(Mass)小于15kg为约束条件进行多目标优化。选择的优化参数为主支撑结构轴向厚度H、法兰面厚度D、边缘厚度D2和加强筋厚度T,优化过程中将主支撑结构上与轴系连接的所有螺纹孔施加固定约束,同时将主反射镜组件、次反射镜组件、后光路组件等安装到主支撑结构上,使结构负载更接近真实工况,优化流程如图2所示。
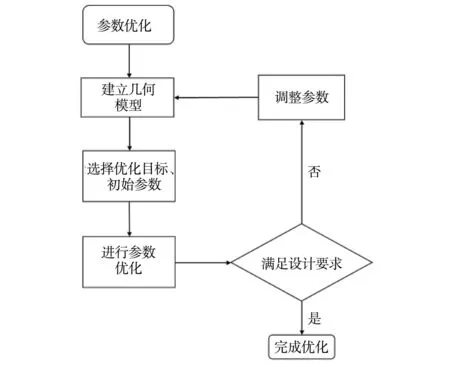
图2 结构优化流程图
为降低主支撑结构和光学元件的制作和加工难度,根据现阶段的制坯工艺和反射镜研磨、抛光等工艺要求,对优化后的数据进行调整,最终选择的主支撑结构参数取值结果及重量见表2。

表2 反射镜镜体优化后结果
根据上述的优化结果参数,重新建立整机的有限元分析模型,如图3所示。为验证整机系统的刚度,观察整机容易产生受迫共振的位置,对整机进行计算模态分析。计算模态分析是指将线性定常系统振动微分方程组中的物理坐标变换为模态坐标,对方程解耦使之成为一组以模态坐标及模态参数描述的独立方程,以便求出系统的模态参数。系统前六阶模态分析结果见图4及表3。
表3 模态分析结果
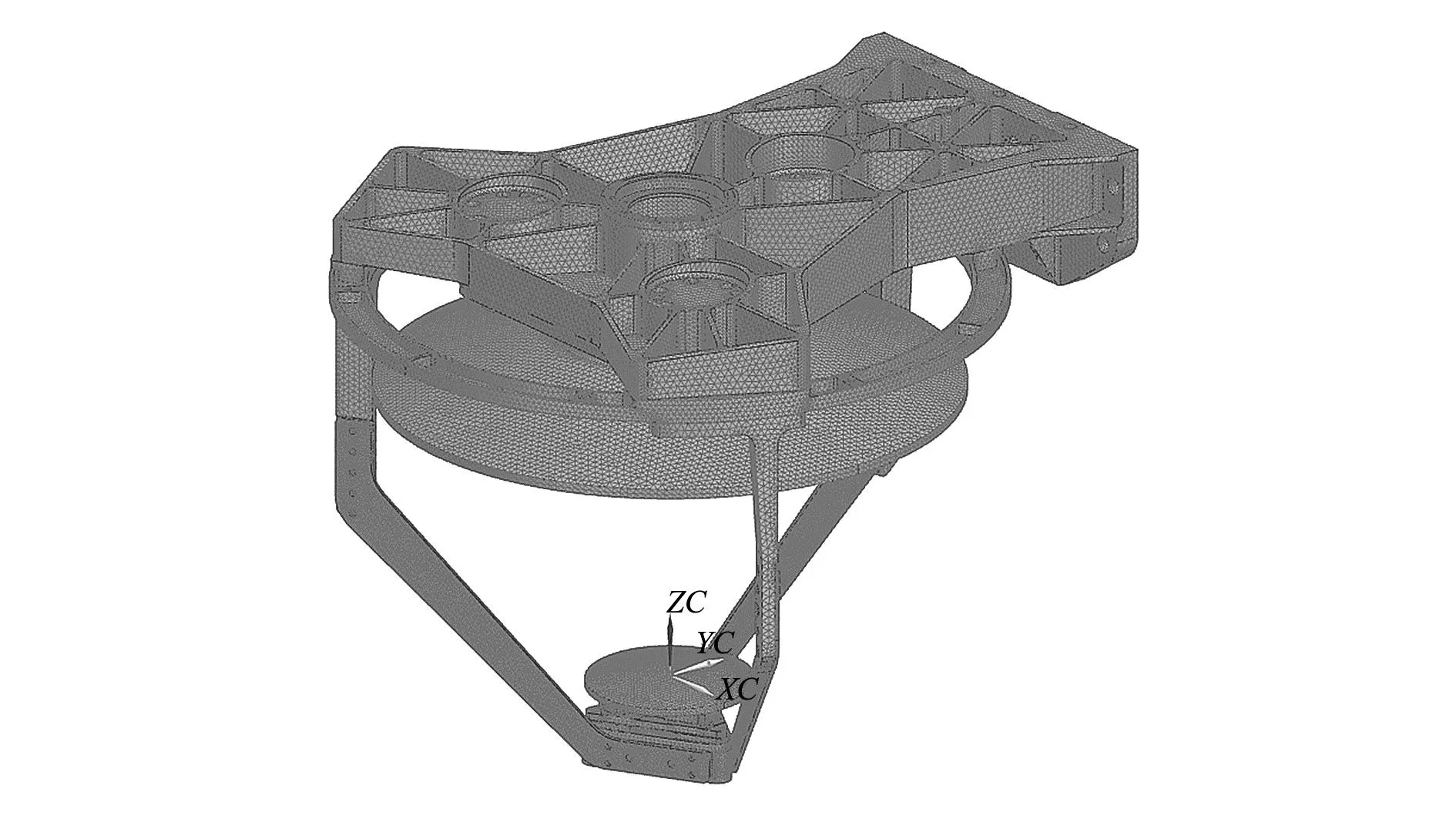
图3 整机有限元模型

(a)整机一阶频率 (b)整机二阶频率 (c)整机三阶频率
有限元分析结果表明,整机的基频超过了100Hz,前六阶振动的幅值都出现在次镜支架上,主支撑结构仅在第5阶与第6阶上出现轻微的受迫振动,且幅值较小,这说明该主支撑结构的刚度较高,具有较好的动态力学性能。
3 试验验证
3.1 主支撑结构的温度适应性试验
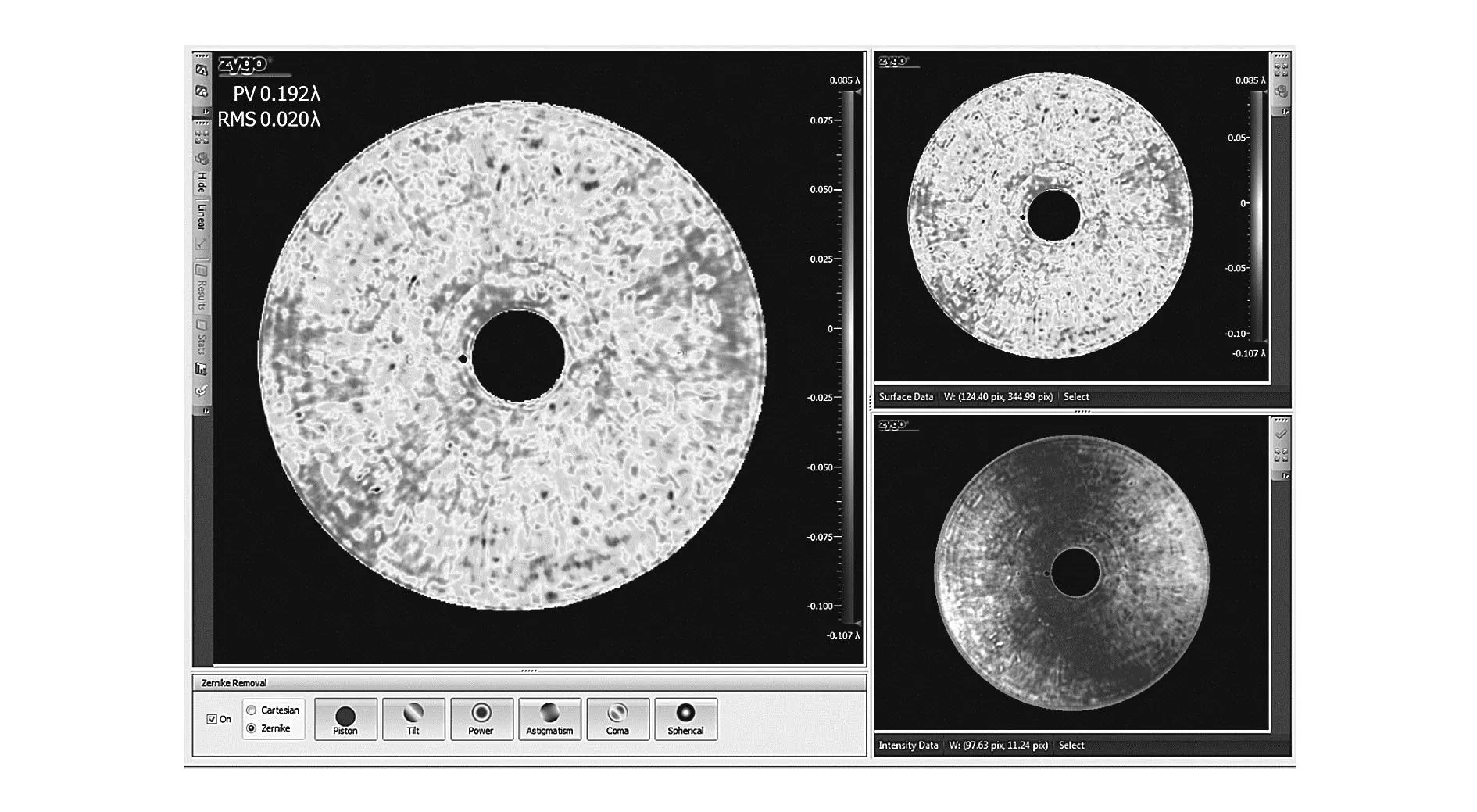
环境温度发生变化时,光学结构表面的半径、厚度以及结构组件的实际尺寸都会发生相应的变化。为了验证该主支撑结构具有良好的温度适应性,将反射镜与该支撑结构组合后,分别在20℃和24℃的环境下进行反射镜面形精度检测,结果如图5所示。在24℃条件下对整机系统的波像差进行检测,检测结果如图6所示。
(a)20℃下的面形精度

图6 整机系统的波像差检测图
从检测结果可以看出,整机系统在20℃和24℃下的反射镜面形精度RMS均为0.020λ,说明该主支撑结构在承受温度载荷后未对反射镜面形精度造成影响,该主支撑结构的温度适应性较好。在24℃条件下,整机系统的波像差为0.05λ,优于设计要求的0.07λ,表明系统具有较好的温度适应性。
3.2 主支撑结构的动态力学性能试验
为进一步验证该主支撑结构的动态力学性能,对整机系统进行正弦振动分析。将主支撑结构的安装面作为振动输入点,整机实物见图7,响应曲线如图8所示。

图7 整机实物图

图8 整机系统正弦振动响应曲线
通过图8可以看出,部件的基频为142.35Hz,远超过设计要求的100Hz,有限元分析结果为138.04Hz,误差仅为3%,与分析结果基本吻合。该振动试验不仅说明了有限元分析的正确性,还证明该结构具有优良的动态力学性能,结构稳定可靠。
4 结束语
针对传统轻巧型同轴光学系统稳定性差的问题,设计了Φ400mm口径全SiC材料的悬臂轻巧型同轴光机系统。采用全SiC材料的三点悬臂式的主支撑结构,完成了可二维旋转的超轻主支撑结构设计。通过参数优化法,以反射镜面形精度和基频为优化目标、整机系统重量小于15kg为约束条件,进行多目标参数优化,确定了满足设计要求的各参数值,获得了重量仅为14kg的整机系统。通过有限元分析对整机进行模态分析,结果表明,系统的基频为138.04Hz,前六阶模态均超过100Hz,从理论上验证了系统具有良好的刚度。
对整机系统进行试验验证,结果表明,整机系统在20℃和24℃下的反射镜面形精度均为0.02λ,系统在24℃下的波像差为0.05λ,优于设计要求的0.07λ,说明系统温度适应性良好。通过振动试验测得整机系统的基频为142.35Hz,与仿真结果相比,误差仅为3%,说明系统刚度较好,可以满足卫星发射时主动段的力学载荷要求,保证整机结构的稳定性。研究结果表明,新型主支撑结构的设计方法正确可行,可以为以后其他型号的主支撑结构设计提供技术参考。
猜你喜欢
智族GQ(2023年10期)2023-11-02
新能源科技(2022年9期)2022-11-20
航天制造技术(2022年4期)2022-09-30
航天返回与遥感(2022年3期)2022-07-07
电子技术应用(2021年1期)2021-01-22
雪豆月读·高年级(2020年7期)2020-09-10
环境技术(2020年1期)2020-03-06
儿童时代·快乐苗苗(2018年6期)2018-09-03
航天返回与遥感(2018年2期)2018-05-17
光学精密工程(2016年6期)2016-11-07
