多波束测深系统在水利工程中的应用
2024-01-04 11:55梁东泽
广西水利水电 2023年6期
李 明,梁东泽
(广西水利电力勘测设计研究院有限责任公司,南宁 530023)
1 多波束测深系统硬件构成
1.1 声呐发射和接收单元
多波束测深系统中设置了发射换能器阵列,能够形成声波并传输到指定位置,到达水底,反射的声波能够被其它装置获取,即接收换能器阵列,结合发射和接收扇区指向的特征获取信息,主要依据正交性掌握地形信息,对该过程形成的照射脚印分析,可以获取大量测量点的水深值,因此可以确定水下目标的信息,包括尺寸和变化情况等,便于人员掌握水底地形信息并以此为依据绘制三维模型。
1.2 主机单元与笔记本工作站
多波束主机单元的作用是产生波束并实现信号的转换,最终获取数字信号,分析处理该信号确定各项参数,包括测量距离和时间间隔等。同时设置了大量的串行和同步钟接口等,便于与传感器连接并完成数据传输。主要借助网络连接实现与工作站的通信。笔记本工作站中设置了控制软件等,便于人员操作并呈现出各项信息数据,同时可以完成这些信息的分析处理。
1.3 惯导姿态定位设备
由于多波束测深工作时,是一个实时动态过程,定位设备与探头在吃水线以下跟随着船只的摇摆而有着小幅度摆动,需要各种传感设备实时反应出船只的状态,并将采集信息反馈到采集系统,对采集到的数据进行校正,并将其分类为处于稳定状态的船体数据。同时,多波束测量系统平面精确定位需要一套定位系统设备(见图1),以此来确定测点位置,从而得到其坐标。

图1 惯导姿态定位设备
1.4 声速仪
在多波束测量时,涉及到不同类型的声速值。
(1)一种是换能器深度处声速值,称之为表层声速,用于波束形成,需要使用表面声速仪对表层声速进行实时测量,避免造成无法挽回的错误。声速仪发出的声速如果大于空气中传播的声速,那么水下地形图会呈现“凹形”;声速仪发出的声速如果小于空气中传播的声速,那么水下地形图会呈现“凸形”。根据相关试验结果,声速C与温度T存在一定联系,且存在明显相关性。
(2)另一种是水体深度处声速值,即声速剖面,能够确定波束点的各项参数从而确定水深等。考虑到深度改变的情况下,水温会受到影响,因此声速也会有所改变(见图2),另一方面,如果介质物理特性有所调整,声线也会受到影响,传播方向会相应的调整,出现折射等现象,而折射程度与上述声速变化率存在一定联系。所以,声线传播过程中容易受到不同介质的影响,尤其是分层介质,会产生多次折射现象。

图2 深度误差线
2 硬件设备安装
2.1 支架与换能器安装
一般情况下,使用船舷悬挂式安装,在这种状况下,安装支架通常分成固定部分和悬挂部分,都是按照预定方案进行设计和制作的。固定部分焊接在船舷;悬挂部分用螺丝铆紧,必要时,增加前、后、侧拉索。多波束系统的水下换能器必须无遮挡安装,换能器前方的水体中不应有气泡产生。对所选择使用的测量船只而言,换能器探头安装的最合适的位置是其前部接近龙骨的位置,其次才是船舷的一侧。
2.2 GPS天线与姿态仪安装
在舱顶选取位置GPS天线,选取的位置卫星通视良好、没有干扰、布线符合规范。GPS 天线安装在换能器的正上方,两个天线的距离(基线长)建议大于2 m,小于5 m,两个天线的位置可以根据净空情况垂直或平行船龙骨轴线。安装时尽量避免电缆通过舱口或窗口,所有的电缆都有最小弯曲半径,保持最小弯曲半径敷设。
甲板式姿态仪安装的位置应选取干燥的船舱,安装的位置应选取一个和船身贴合的地方固定,水平位置尽量的靠近水面,平面位置选取船的重心。布线尽可能避免从窗门进入船舱,避开甲板通道,不与电线在一起。布线原则基本和GPS天线连接线一样。
2.3 主机安装
由于作业地点一般都在航道上,所以选取位置应找到固定桌子平台,并按照船只的摇晃程度适当使用固定角铁固定。接线时要注意接口的一一对应,切勿大力插拔,线缆均属贵重物品,要注意使用时的维护。
3 多波束校准
考虑到多波束换能器实际安装时难以保持水平,因此该器件与水平面会形成一定角度,主要是对比船只水平面,该角度主要作为纵摇偏差(pitch);该角度集中在纵向上,针对垂直方向,一般构成了横摇偏差(roll)。
在实时测量过程中,由于船体的运动导致换能器与水平面之间也产生一个动态夹角,所以每一个横摇角与纵摇角都包含一个动态分量和静态分量。动态分量是因水波、海涌、风浪等外界原因造成,可以通过姿态仪予以校正(见图3);静态分量是由于设备安装造成的,即平时所说的横摇偏角和纵摇偏角。

图3 多波束校准
两天线安装的指向与换能器指向可能存在偏差,这个偏差叫艏向偏差(heading)。
4 应用实例
那板水库是一座集防洪、灌溉、水力发电、城镇供水及养殖等功能大(2)型水库,水库集雨面积490 km2,总库容8.32 亿m3,设计灌溉农田3.5 万亩。运用多波束测深系统对库底地形进行监测,为完善水库崩岸监测体系提供重要的监测手段。
4.1 建立测区控制网
收集整理那板水库淤积物数据,总结目前那板水库淤积物的现状问题,收集整理库区周边生态环境和地形地貌特征,了解库区监测的重点难点,建立库区四等平面、高程控制网,将库区坐标系统统一到国家标准坐标系统框架下,并建立相应等级的变形监测基准点、工作基点。基本平面控制网不应低于五等,重要水库不应低于四等。基本高程控制网不应低于四等。平面和高程控制网应包括水库最高蓄水位的淹没、浸没、塌岸和水库淤积、回水发展可能影响到的地区。为地形图测绘、断面测绘、水位测量等提供坐标、高程起算依据,实现坐标高程基准的统一,为后续各项监测提供基准点框架。
4.2 水下地形测量
选择在枯水季节测量,在总结现有那板水库水下地形分布的基础上,采用GNSS 设备与上述测深系统完成测量工作,获取水下地形信息,包括横断面端点测量和纵横断面测量,基本保障水下每0.1 m2区域有点,密集的点形成了水下的点云图,经过去噪等处理后生成高度还原的水下地形三维模型和三维等深线、平面二维等深线、等高线,为库容计算提供精准的数据。其次,结合库区安全运行管理和水质优化目标,以问题为导向,研究提出减少泥沙入库和清除水库淤积的措施等内容,为同类水库工程的水环境治理和防治积累资料和经验。测量比例尺为1∶1000,同时须测量水位高程。同一库段测图比例尺一经选定不宜变动。经过技术处理,绘制水下地形图(见图4)及建立水下三维模型(见图5),实现首次完善和查看水库建库以来的真实地形地貌信息。
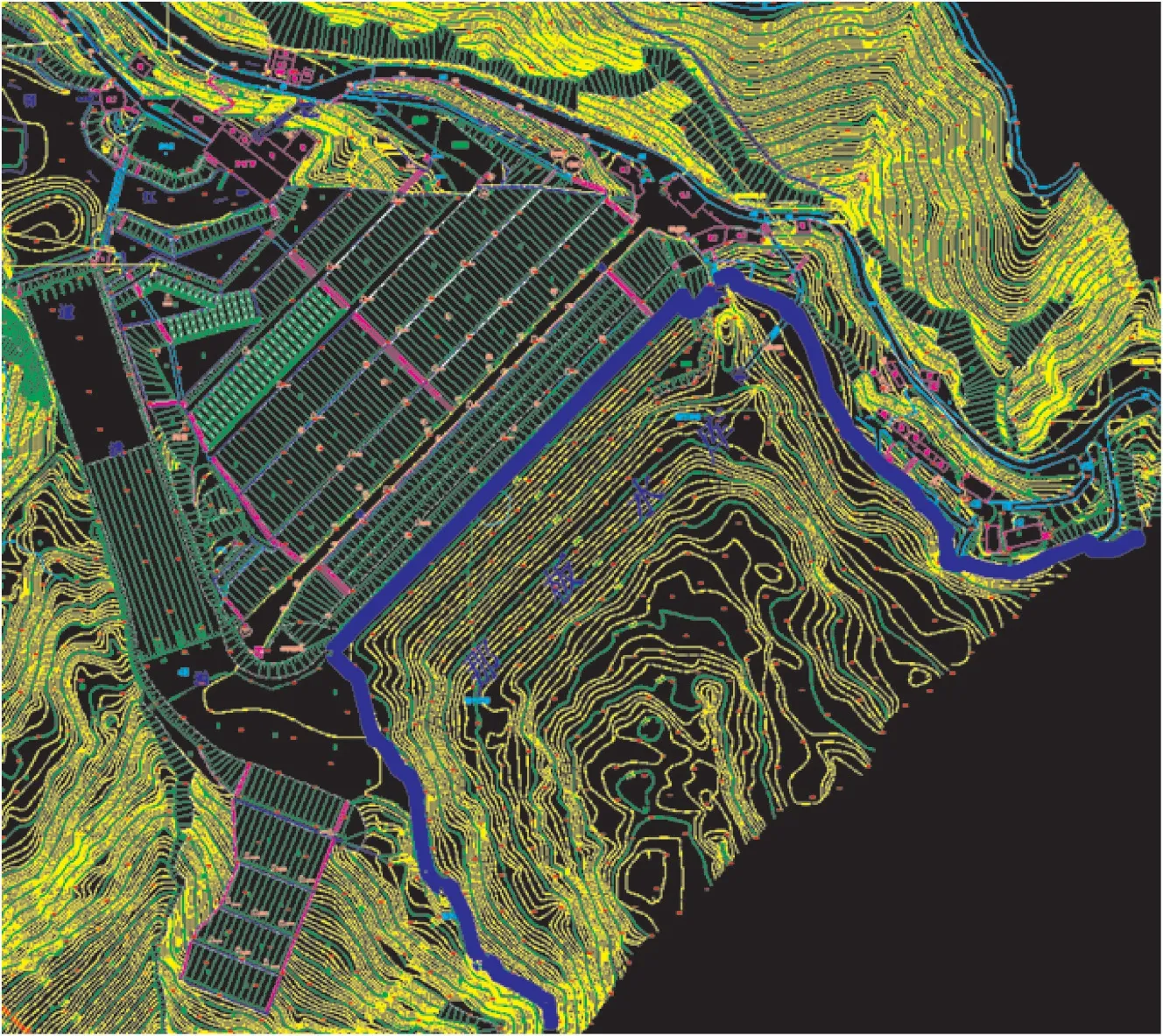
图4 水下地形图
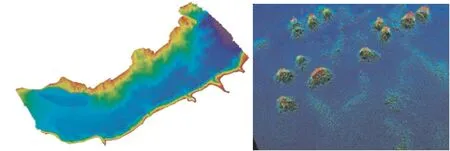
图5 水下三维模型
水下地形测量的重点是现场数据采集,为了确保数据准确,需要采取必要的措施,比如对仪器实时监视,采集数据的信噪比,以及测量范围。同时固定仪器的船舶需要匀速前行,根据现场的实际情况调整船速,避免收集到的每个原始数据文件过大,而导致原始数据出现异常情况。若传感器无法正常工作,需要停止测量工作,找出系统中存在的问题。如果回波信号质量不满足要求,需要改变发射和接收模式,调整各项参数,从而提高多波束信号质量。如果采集数据范围较窄,数据不完整,导致测深结果精度不高时,应采取补测等方式处理。
在实际测量时研究单波束测量数据,发现测量数据具有一定特征,如数据点密度较高。能够获取水下目标相关信息,包括尺寸等。以这些数据为依据绘制等深线,能够准确表示地形特征,查看其中包含的沙坡和石堆等。,
4.3 固定断面测量
水文剖面测量一般是在水流速度变化处布设,如转弯处、宽库区或者窄库区,间距在500~3000 m之间,能够体现出纵横方向的转折变化,正确反应库底地形情况。宜两岸埋设永久性固定断面标志,固定断面标志平面应不低于二级图根点精度,高程应不低于五等水准精度。每次监测位置固定,不宜改动。采用北斗GNSS结合测深仪对断面位置地形进行监测,监测断面位置的地形变化,推算库区淤积,同时进行库水位监测,用于计算库容。
在测量区域的关键部位设置剖面,使用相同的剖面桩进行剖面测量。以1∶2000 的比例尺对固定剖面进行对比测量,并绘制剖面图。在处理测量数据时,主要对河流高程数据进行分析,并以此为基础绘制图例,其中涉及到大量不同测量次数的剖面数据。用不同的颜色和线形表示不同监测调查次数的剖面。根据剖面图中的纵横坐标进行对比分析,计算河堤水下地形的变化,得出结果。固定剖面对比图见图6,断面位置示意图见图7。

图6 固定剖面对比图
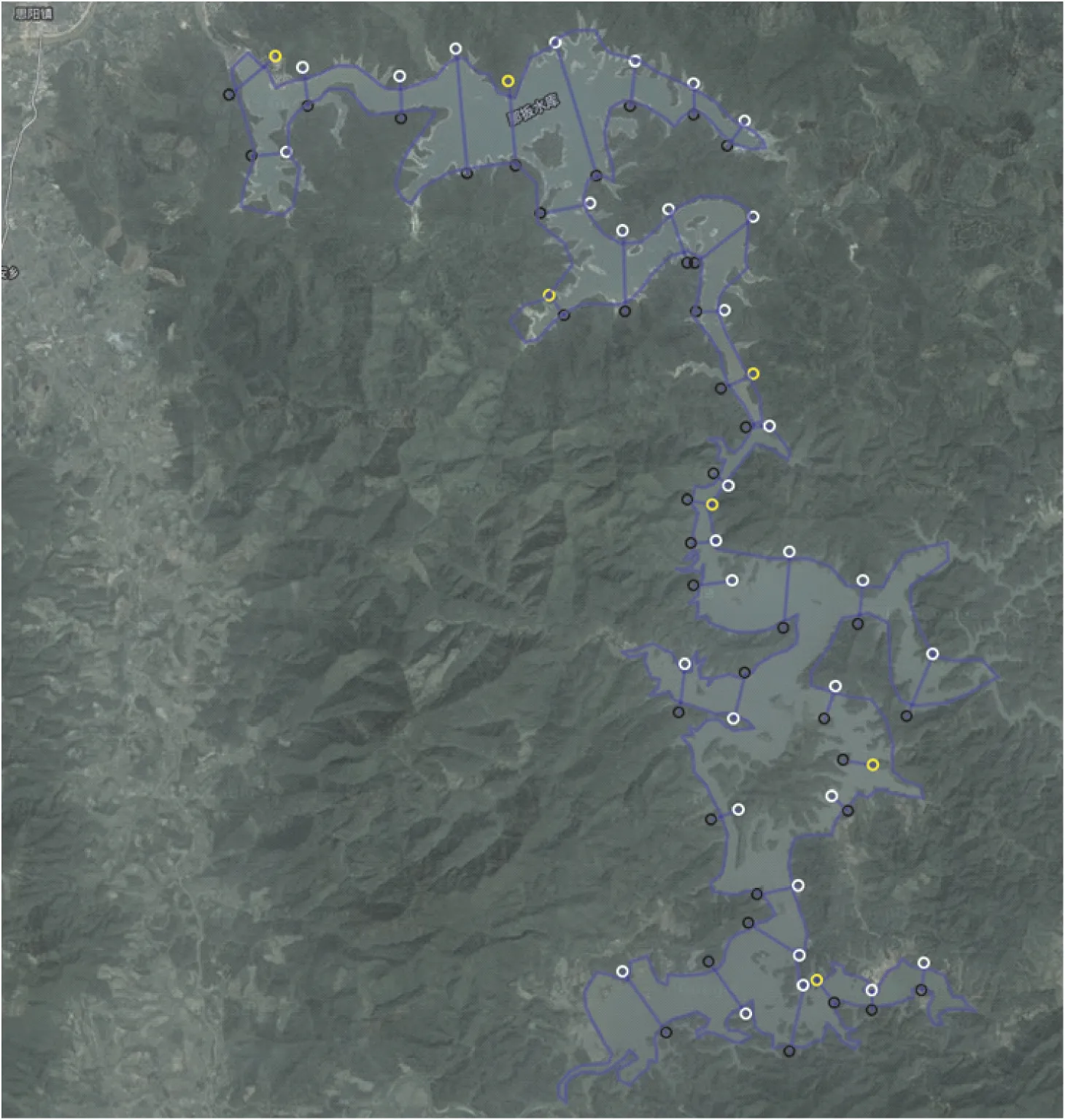
图7 断面位置示意图
4.4 水库监测管理平台
那板水库力争打造为广西壮族自治区“智慧化”管理的标杆,需对水库的各种基础信息、数据全方面掌握,以利于以后的监督、管理和维护。那板水库虽已先后建设支撑水库工程安全、防洪等业务管理的信息系统,但没有统筹兼顾各种信息系统的建设,致使各类数据相互独立,分散式存储,存在数据壁垒和信息孤岛现象,无法实现数据资源的整合和共享。基于B/S 构架开发水库监测管理平台(见图8),全面融合激光雷达数据、多波束测深数据、影像数据、三维数据等多源数据,根据水库淤积的分布、演变情况,对不同水位下库容的影响情况进行分析、统计,自动生成各类图表,形象生动地显示库区淤积情况和分布。数据平台提供二次开发接入的接口,方便数据的互通互用,同时也可整合或纳入其他平台,实现数据资源的整合和共享。

图8 水库监测管理平台
5 存在的问题
为了能够对那板水库的变化情况进行实时了解,那板水库管理处每年都会对关键的崩岸段、河势控制区域进行水下地形监控,监控的距离达到了20 多公里,对水库的监控数据进行了主要的分析,并给出了那板水库崩岸预警的基本资料。但是,在应用过程中也会出现以下问题。
(1)由于多波束测距所需的资料非常庞大,而且后期的内部加工工作比较繁琐,人为的介入会导致加工的准确性受到很大的影响。在水急水浅的地区,这个系统的工作效率比较差,经过测试发现:这个系统在深水(>3 m)区域的大比例尺、小范围测图方面,有着传统的测深系统所不能相比的优势,但是它并不适合进行浅水、小比例尺的测量[1]。
(2)考虑到多波束测深系统具有一定缺陷,如灵活性不高,安装流程过于复杂,操作难度较高,对比单波束测深系统,该系统耗费了大量的人力物力资源,人员需要完成外业操作和内业处理等工作,工作效率较低[2]。
(3)多波束测深系统可能形成明显的误差,而且往往难以发现。多波束测深系统运行过程中容易受到各种因素的影响,如水流、系统参数和测船等。所以,在测量期间,应合理设置各个设备的位置,加强质量控制,做好精度评估工作,确保测量工作顺利开展,提高测深精度。正确处理船舶测量时的吃水深度,测量船的横摇纵摇对测量结果至关重要,应加强测定。
(4)在数据后处理时,还需要重新对各种校正参数进行核对,是否有人工输错或是因外界条件影响导致偏差。
6 结语
近几年,利用多波束水深测量技术,收集了那板水库崩岸区的水底资料,并进行了观测与对比,在此基础上,探讨崩岸区溃决及其预测方法,并对崩岸区进行主动防护,以保证水库水位不会有较大的改变。按照水库水位的变动特征,在洪峰之前和洪峰之后,增加对大坝的监控次数,并为收集到的监控数据创建一个特殊的地理资讯资料库,为水库水环境治理、水资源保护以及水工程建设与养护等方面的研究提供技术支撑。
猜你喜欢
通信技术(2019年3期)2019-05-31
电子测试(2018年6期)2018-05-09
声学与电子工程(2017年1期)2017-06-22
声学与电子工程(2017年1期)2017-06-22
声学与电子工程(2017年1期)2017-06-22
中学生数理化·八年级物理人教版(2016年7期)2016-12-24
雷达与对抗(2015年3期)2015-12-09
电源技术(2015年2期)2015-08-22
航空学报(2015年4期)2015-05-07
航空学报(2015年4期)2015-05-07