
机械设计制造及其自动化技术的智能应用分析
2024-01-04 12:21李雪凝
机械管理开发 2023年11期
李雪凝
(长沙理工大学, 湖南 长沙 410000)
1 智能制造时代机械设计制造概述
1.1 智能机械制造的优势
在智能制造中,由于机械制造具备了高精度、生产过程能源耗费较低、生产作业简便等的特征。在生产制造中,按照特定的生产过程检查和调节制造参数、生产流程和生产工艺,有效地提高了机器制造的效率;在制造流程中,能及时地发现存在的不良现象,并经过检测、预警、查询、处理等流程,能有效提升机械制造的准确度;另外,由于在机器中配置了变压器系统,增强了设备间的可靠性,降低了设备之间的摩擦,减少了能源耗费。
1.2 智能机械制造的发展趋势
机械设备制造业已经成为我国国民经济发展的主要支柱产业之一,并正向着自动化、智能化趋势发展。在智能时代,机械设备制造商应该提高环境保护能力,并加强在设计环节中采用绿色环保的材料,以使机械制造设计更符合可持续发展的原则;并且在实际使用过程中的机械特性也需要进一步改善,以增加设备的生产能力;另外,企业还需要增加管理技术的实用性。通过增加企业对机械制造优势与特点的研究,以及通过智能化技术的运用,提高企业对生产过程的控制,增加企业生产流程的弹性[1-2]。
2 机械设计制造自动化的特点
2.1 可靠性
智能自动化技术的应用能够较好地避免事故发生,同时相关工作人员也可以不再进行手工操作,通过计算机程序就能实现远程操控。但在这一过程中难免会出现问题,因此,均需在程序编写过程中反复检查,避免出现安全隐患,如若发生重大事故应立即采取相应的补救手段,这能降低或避免工作人员在作业过程中出现事故。
2.2 高效性
工程机械设计制造自动化具有高效性,尽管实际参与制造的人较少,但其过程拥有很好的秩序性和条理性,而且没有出现延迟的现象。采用自动化控制,能有效提高工作效率。通过传感器技术和电脑系统等设备对产品及工序进行检测分析进行加工处理,利用PLC 程序实现对整个生产过程的监控和管理。
2.3 机械自动化技术的意义
机械自动化技术带来了新的工作环境与新的发展方向。它不仅是一种先进的技术,更是一种先进的科学管理理念。
3 机械自动化技术的实际应用(以机器人为例)
3.1 工业机器人
不同的机器人有不同的结构类型,通过对机器人的结构上的分析可以进一步对机器人进行分类。
工业机器人可分为直角坐标型机器人、球坐标型机器人、圆柱坐标型机器人和多关节型机器人。码垛机器人在进行构型选择与设计时,需要遵循四个原则:保证机械臂的工作空间能够满足作业要求;在满足工作环境的条件下,尽可能减少自由度;为了避免出现机械臂不可控制和损坏机械臂的情况,需要消除机械臂的奇异位型;以及合理设计机构,机械臂能够正常运动和方便制造。从机械手的坐标结构来看主要分为直角坐标、圆柱坐标、球坐标、关节坐标。气爪的气动控制,气爪部分是用来实现抓取的功能,是实现现代机械手控制的关键,气爪由气缸提供抓取力,可以实现对于重物的抓取,如图1 所示。

图1 气爪形态示意图
3.2 农业机器人
采摘机器人分别由视觉定位系统、机械臂系统、末端执行机构系统以及总控制系统组成。具体实例如下:
1)椰子机器人:可以像人一样对物品进行抓取,有类似于人的关节,同时也有类似与人的大脑的控制系统,来控制不同的关节之间的移动,简单说这类机器人是有驱动、传统以及控制的系统三部分组成,由视觉识别系统对椰子进行识别,识别后有升降台将小车的执行部件运送到指定的位置,从而实现抓取的操作。抓取下椰子之后,直接将椰子放到地面上。
2)自动喷药机器人:目前最常见的喷药机是人操作的背负式喷雾器,对于高大的植物则采取了使用航空喷雾的方法。喷药机器是通过机器运动的手段对喷药装置进行驱动,大部分是使用轮子进行驱动,同样也有使用履带驱动。
无论什么形式的喷药装置,最大的特点都是可以通过各种手段实现对人力的替代,提高工作效率。但我国额定喷药机器的研究仍然较落后,传统喷药方式的缺点主要为效率低,人力成本大。经过不断研究发现,国内诸多果蔬的采摘、施肥、喷药等工作已经采用自动喷药装置来取代人工操作。喷药装置的应用可以极大提高工作效率,达到灵活喷药的目的,这些喷药装置基本上都应用于园林的护工等工作上[3]。
通过研究调查多个自动喷药装置发现,果园喷药装置主要分成三部分,即喷药系统、行走系统和控制系统。喷药装置的设计重点是在底盘的结构设计,即行走机构的设计;喷药系统的设计,即喷药的方式以及喷药用的药水存储方式,以及基本的控制系统组成,不同的系统有不同的控制逻辑以及基本的控制方法。其底盘布局和整体结构如图2、图3 所示。
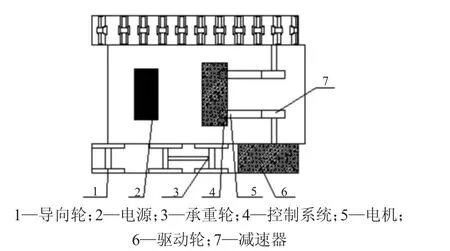
图2 底盘布局
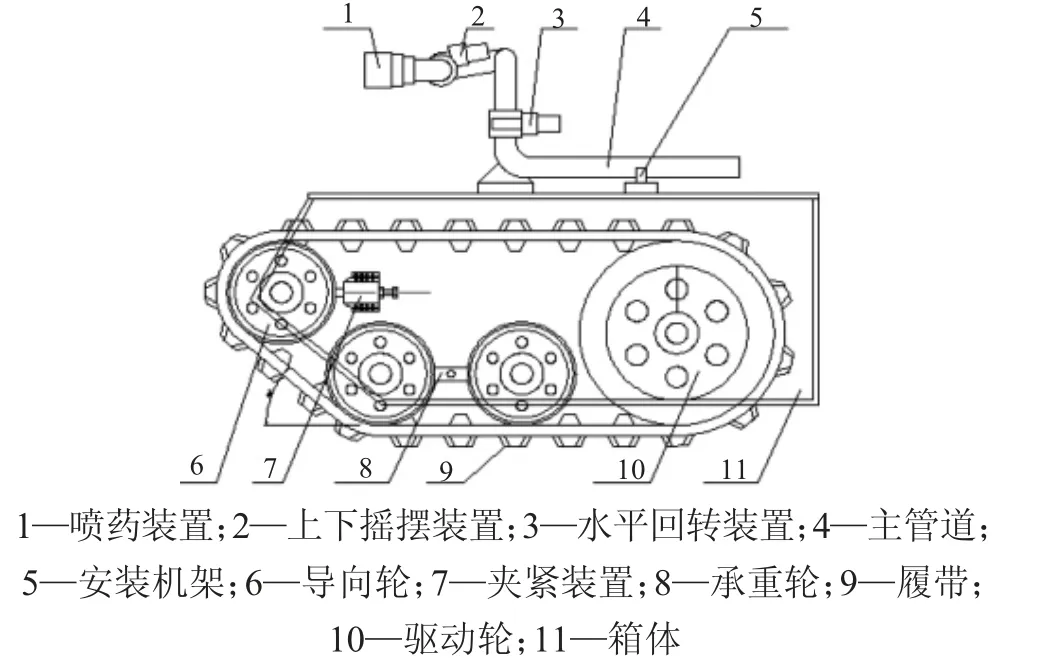
图3 整体结构
由于果园中的环境比较复杂,喷药装置在操作时为了适应果园复杂的工作环境,设计一个履带行走机构,来实现爬坡等操作。行走机构外侧是通过履带和地面直接接触,履带的作用是为了增加与小车与地面之间的接触面积从而减小压强。当履带行走机构运动的时候,有电机驱动链轮选择,由链轮的转动带动着履带的运动,由于履带板与路面之间的附着力大于驱动链轮、支重轮和导向轮的滚动阻力,所以履带板不会滑动,而驱动链轮、支重轮和导向轮则沿着铺设的链轨滚动,从而驱使整机行走。
4 结语
我国机械制造自动化技术的广泛应用,促进了机械领域的发展。但我国的此类技术与发达国家相比仍存在一定的差距,应针对目前的问题与难题展开深入的研究,让智能技术在机械制造技术中得到全面的提升,以此来增强国民经济的快速发展。
猜你喜欢
中学生数理化·八年级物理人教版(2023年4期)2023-05-05
信息记录材料(2022年3期)2022-05-17
今日农业(2021年13期)2021-11-26
农业装备与车辆工程(2021年8期)2021-08-28
中国石油石化(2021年8期)2021-03-30
南方农机(2021年1期)2021-01-20
港口装卸(2020年3期)2020-06-30
石油化工建设(2019年6期)2020-01-16
现代营销·理论(2019年10期)2019-09-10
电子测试(2018年23期)2018-12-29
