自激振荡磁感应传感器研究
2024-01-08 09:01张志勇陈正想高俊奇
数字海洋与水下攻防 2023年6期
张志勇,陈正想,高俊奇
(1.哈尔滨工程大学 青岛创新发展基地,山东 青岛 266300;2.中国船舶集团有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
磁场传感器广泛用于地磁测量、导航定位、海洋探测及生物医学等领域。根据不同的应用场景,目前市面上已存在各种磁场传感器,例如:感应磁传感器(探测线圈)、霍尔传感器、磁通门传感器、GMI(Giant Magneto Impedance)传感器等,其原理及优缺点可在文献[1]–[8]中找到。
随着数字技术的发展,信息更趋向于以数字形式传输[9-10],但上述所提及的磁场传感器输出均为模拟信号,即输出信号是电流或电压。要想达到数字形式输出,同时为了减少信号处理过程中的误差,需要使用高性能的模数(A/D)转换器件,这将提高系统的复杂性和成本[11-12]。因此,有必要寻求一种在不使用模数转换模块的前提下,便可实现磁场强度测量的磁场传感器方案。国外PNI 公司提出了磁感应(Magneto-Inductive,MI)技术[13],应用MI 技术,PNI 公司研制了数字式的磁场传感器以实现磁场测量[14-15]。针对国内数字式磁场传感器的研究,本文提出了一种自激振荡磁感应技术,其测量原理基于励磁电压占空比与被测磁场的线性关系,通过测量占空比从而得到被测磁场强度。这种测量方式不需要模数转换器件,能够减少电路的复杂性和成本。
基于自激振荡磁感应技术,本文研制了一种数字式磁场传感器,并建立了励磁占空比与被测磁场的理论方程,通过实验测试后,验证了自激振荡磁感应技术应用于磁场测量的可行性。
1 系统组成和原理
自激振荡磁感应磁场传感器的原理结构图如图1 所示,其中线圈绕组W与高磁导率的非线性磁芯组成敏感探头,等效电感L、比较器A、采样电阻R3和门限控制电阻R1,R2构成自激振荡电路。电阻R1和R2为比较器电路的阈值设定电阻,采样电阻R3用于将流过线圈的激励电流转换为电压。

图1 磁场传感器原理结构图Fig. 1 Schematic diagram of a magnetic field sensor
传感器工作时,在探头线圈电感、线圈内部磁芯和放大器作用下,比较器输出正向电压为Vo+,负向电压为Vo-的方波,设置合适的阈值电压V+,磁芯会进入正负饱和区域。在正负激励电压Vo作用下,非线性磁芯工作在饱和与不饱和状态,由于探头线圈绕组的电感受内部磁芯磁导率影响,其电感在磁芯处于饱和区和线性区时有明显区别。在被测磁场影响下,磁芯提前或延长进入饱和状态,因此在同一振荡周期内,比较器输出方波占空比会增大或减小。
在被测磁场为0 时,磁芯上没有偏置磁场,此时磁芯的磁化曲线如图2(a)中实线所示,磁芯到达正负饱和状态临界磁场相同,在激励电流(图2(c))的作用下,输出电流呈周期对称,如图 2(b)中实线所示,因此在比较器比较输出后,电压Vo正负电压持续时间相同;当被测磁场不为0时,被测磁场与激励电流产生的磁场将叠加在一起,此时磁化曲线将发生偏移,如图 2(a)中虚线所示,磁芯将提前或延长进入饱和区,经比较器后,输出正负电压持续时间不相同,在同一周期内,占空比发生变化。

图2 激励波形下非线性磁芯的工作原理Fig. 2 Operation principle of a nonlinear core under an excitation waveform
综上所述,被测磁场与比较输出电压的占空比存在某种对应关系。因此,只要找到输出电压占空比与被测磁场的关系就能得到被测磁场强度。
2 数学模型
为了找到占空比与被测磁场强度的对应关系,假设磁芯的剩磁和矫顽力足够小,此时磁化曲线可以采用分段近似方法[16-18]。如图 2(a)所示,磁化曲线在线性区和饱和区可以近似为2 段不同斜率的曲线,在线性区内,假设线圈电感为L1,根据基尔霍夫电压定律,可以得到在线性区时输出电压的微分方程为
在饱和区时,假设线圈电感为L2,根据基尔霍夫电压定律,可以得到在饱和区时输出电压的微分方程为
分析图 1 中自激振荡电路,比较器阈值电压为V+=R1Vo/(R1+R2),采样电阻R3上的电压为V-=iLR3,当采样电压V->V+时,比较器输出高电平Vo+,反之,比较器输出低电平Vo-。刚接通电源时,由于探头线圈电感的作用,激励电流iL从0开始增大,当电流增大到使采样电阻R3上电压V-到阈值电压V+时,激励电压反转,电流将开始减少,如图3 所示。为了使磁芯进入饱和状态,iL应大于饱和临界电流Is,且:
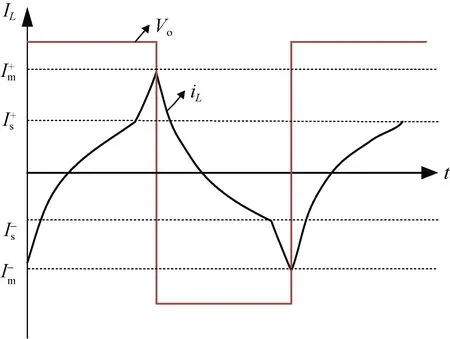
图3 被测磁场为0 时,激励电压和电流波形Fig. 3 Excitation voltage and current waveforms when measured magnetic field is 0
式中:μ为磁导率;N为线圈匝数;Bs为饱和磁感应强度;L为有效磁路长度。
假设被测磁场方向如图1 中所示,在被测磁场作用下,激励电流某时刻处于如图4 所示状态,假设此时被测磁场为B,与激励电流iL产生的交变磁场方向不一致,此时磁芯达到负向饱和所需的电流为Isn-=-Is-IB(其中IB为被测磁场在线圈上的感应电流,其表达式为IB=μLB/N)。磁芯达到正向饱和所需的电流为Isn+=Is-IB。

图4 被测磁场不为零时,激励电压和电流波形Fig. 4 Excitation voltage and current waveforms when measured magnetic field is not zero
在t= 0 时,磁芯在t1时间段处于负向饱和区,此时,有初始条件iL(0) =-Im,iL(t1)=-Isn-;结合分段线性模型和式(1),可以解得:
式中:时间常数τ2=L2/(R3+RL);RL为线圈内阻;Io=Vo/(R3+RL)。
随着电流继续增大,磁芯逐渐进入线性区(4),此时电感从L2变为L1,由iL(t1+t2)=-Isn+,可以解得t2:
式中,时间常数τ1=L1/(R3+RL)。
经过t1+t2时间段后,磁芯再次进入正向饱和区,在时间点t1+t2+t3,激励电流iex达到正向电流最大值Im,即iL(t1+t2+t3)=-Im,可以解得t3:
由于磁芯的磁化曲线分段线性模型的对称性,时间段t4、t5、t6可以使用求解t1、t2、t3相同的方法,因此,解得t4、t5、t6如下:
由公式(3)–(8)可以得到负占空比时间Tn和正占空比时间Tp的表达式如下:
实际情况下τ2<<τ1,结合上述求解时间段与理想极限条件下分析,可以得到占空比D和被测磁场B的理论公式:
式中:μ为磁导率;N为线圈匝数;L为有效磁路长度;B为被测磁感应强度;Io为线圈上电流最大值;Is为饱和电流。
从式(11)可以知道,在磁化曲线分段近似的条件下,占空比与被测磁场大小存在线性关系。
基于该测量原理,需要考虑占空比测量精度,目前,测量占空比的方式有很多种,例如使用单片机定时器输入捕获。本文提出的磁场传感器以占空比形式测量更有利于实现数字化。
3 实验结果
基于原理性分析,制作了基于自激振荡磁感应技术的原理样机。磁芯材料性能和研制磁传感器之间有着密切的关系。为了提高磁传感器的测量精度和灵敏度,需要选择低矫顽力、高饱和磁感应强度、低剩余磁感应强度的磁芯材料。因此,本样机中探头内部磁芯采用高磁导率,低矫顽力的钴基非晶合金,磁芯为薄片状,通过骨架固定在线圈中心。将样机放在螺线管中心(在中心处可近似为均匀磁场),如图5 所示。加入不同电流使螺线管内部产生不同大小均匀磁场,记录每组设定磁场下样机输出占空比数据。实验结果如图6、图7所示,由实验波形可以看出,传感器输出波形与理论分析一致。

图5 样机测试图Fig. 5 Prototype test diagram

图6 被测磁场为0 时,输出电压和电流波形Fig. 6 Output voltage and current waveforms when measured magnetic field is 0
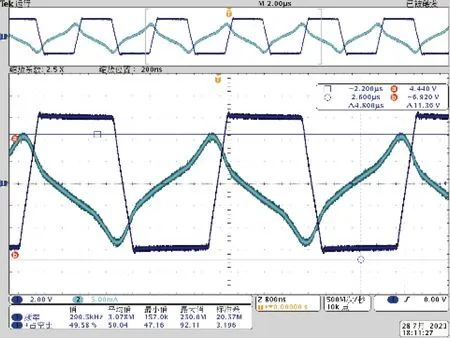
图7 被测磁场不为0 时,输出电压和电流波形Fig. 7 Output voltage and current waveforms when measured magnetic field is not 0
根据测试数据,得到了样机的输出特性曲线如图8 所示。由输出特性曲线可以看出,输出信号处于近似理想的线性工作区。结果表明,在开环条件下,±100 000 nT 量程下传感器的线性度在0.98%。

图8 输出特性曲线Fig. 8 Output characteristic curve
4 结束语
本文提出一种基于自激振荡磁感应技术的新型磁场传感器,该传感器利用了激励电压占空比与被测磁场的对应关系。通过推导理论公式验证了激励电压占空比与被测磁场存在线性关系。与其他磁场传感器相比较,本文提出的磁场传感器模数转换电路等信号调节电路,更有利于实现数字化和小型化。同时,制作了原理样机,并通过实验结果表明了在开环状态下,±100 000 nT 量程下传感器的线性度在0.98%。为后续优化设计自激振荡磁感应传感器有重要意义。
猜你喜欢
现代电子技术(2023年4期)2023-02-19
舰船科学技术(2022年21期)2022-12-12
传感器世界(2022年6期)2022-11-25
舰船电子工程(2021年12期)2022-01-06
通信电源技术(2018年5期)2018-08-23
电测与仪表(2015年16期)2015-04-12
河南科技(2015年11期)2015-03-11
电测与仪表(2014年13期)2014-04-04
河南科技(2014年14期)2014-02-27
无损检测(2013年8期)2013-08-15