Boost变换器终端滑模控制研究
2024-01-08 00:52李晓磊邵明燕李思远张爱兰朱彦玮
山东电力高等专科学校学报 2023年6期
李晓磊,董 旭,邵明燕,李思远,张爱兰,朱彦玮
(国网山东省电力公司济南供电公司,山东 济南 250012)
0 引言
Boost 变换器是一种广泛应用在电气工程领域中的电力电子装置。从系统论的观点来看,Boost 变换器具有复杂的动力学特性。Boost 变换器是强非线性和时变性的非最小相位系统,而且控制信号的调节范围有限,因此需要一个高性能的控制器来改善Boost变换器的动态性能[1-3]。
文献[4]分析了Boost 变换电路平滑切换的典型控制方法,并通过数学推导归纳了影响变换器效率的关键因素。文献[5]提出采用时变滑模控制方法来控制Boost 变换器的输出电压,并在滑模面的设计中引入变换器参数的变化,获得了较好的瞬态响应特性和启动性能,对改进Boost 变换器的控制性能起到了一定的作用,但该控制方法由于时变滑模控制的特点,系统在滑模面上的运动只能达到渐进稳定,而且系统的动态响应也有待进一步提高。
本文将终端滑模控制应用于Boost 变换器中,通过控制系统中储存的总能量,间接地对Boost 变换器的电容输出电压进行调节,使电容输出电压跟踪目标电压,系统能够在有限的时间内达到平衡点,响应速度快,控制鲁棒性好。
1 Boost变换器模型
Boost 变换器电路图如图1 所示。Boost 变换器电路由功率开关T、储能电感(其值为L)、续流二极管VD、滤波电容(其值为C)、负载电阻(其值为R)和电源(其电压为E)组成。在电感电流连续方式下,电路分开关T 导通和开关T 断开两个阶段。开关T导通时,为电感储能阶段,此时电源不向负载提供能量,负载靠电容中储存的能量维持工作。开关T 断开时,电源和电感共同向负载供电,同时还给电容充电。
设开关占空比w=ton/tall(其中ton为导通时间,tall为总通电时间),当开关T 导通时,该模型的状态方程可以表示如下:
当开关T 断开时,该模型的状态方程可以表示如下:
根据式(1)及式(2),可推导出一个周期下的状态平均模型:
系统运行时其储存的能量y可表示为:
由Boost 变换器的工作原理可知,当系统能量y收敛到系统的目标能量yd时,电感电流和电容输出电压也必然会随之收敛到目标电流和目标电压。
2 Boost变换器的终端滑模控制
2.1 控制目标
系统的控制目标是使电容输出电压uC快速精确地跟踪目标电压。此外,系统应对负载变化和外界干扰具有鲁棒性。
2.2 终端滑模控制器
系统稳定时储存的能量与实际储存能量的误差e为:
为达到控制目标,取终端滑模控制(Terminal Sliding Mode Control,TSMC)超曲面为:
式中:ė为e对时间的一阶导数;α、p、q为TSMC 超曲面参数,其中α>0,p、q是奇数且q<p<2q。
令s= 0,解方程可得:
从e(0)≠0到e(ts)= 0所需要的时间ts为:
将式(7)代入式(10)可得:
可见,系统到达滑模面后将在ts时间内收敛到0。
系统储存能量y对时间的一阶导数̇可表示为:
将式(4)代入得:
系统存储能量y对时间的二阶导数̈为:
根据系统的数学模型公式(4),设计终端滑模控制器的控制信号如下:
当系统运行参数不位于TSMC超曲面时,为保证有更好的控制效果,在式(16)等效控制的基础上增加一个切换控制,选取切换控制算法为:
将式(15)和式(16)代入式(17),从而得到非线性控制分量:
选择合适的参数,将式(15)应用于式(4)所示的Boost 变换器模型,系统就可以在有限的时间内收敛到目标电压[6-7]。
为验证控制算法的收敛性,系统的Lyapunov 函数为[8-9]:
因此滑模变量s可以在有限的时间内收敛到0。
2.3 负载观测器设计
为增强系统对负载干扰的鲁棒性,设计负载观测器,使系统在负载变化的情况下有较好的控制性能。假设Boost 变换器的负载为纯电阻性负载,系统稳定运行时电阻为R0,设计观测器的输出为R̂,观测器的数学模型为:
式中:uC为电容输出电压;iR为流过负载电阻的电流。
3 仿真结果
Boost 变换器控制系统原理图如图2 所示[10-12]。系统主要由终端滑模控制器、脉宽调制(pulse width modulation,PWM)模块和Boost 变换器组成。终端滑模控制器根据控制算法对目标电压、Boost 变换器反馈的电压和电流进行计算,输出控制信号。脉宽调制模块将终端滑模控制器输出的控制信号转化为可以直接控制开关分合的PWM 信号。Boost 变换器根据PWM信号分合开关,调节系统电流、电压。
3.1 系统仿真结果
仿真系统中,电感值为6 mH,电容值为45 μF,负载的电阻值为50 Ω,输入电压值为7.5 V,系统输出目标电压为60 V,开关频率为100 kHz。控制器参数:p=5,q=3,k1=15 000,k2=30,α=250。电容输出电压和电感电流初始值设置为0,终端滑模控制器的控制信号如式(15)所示。
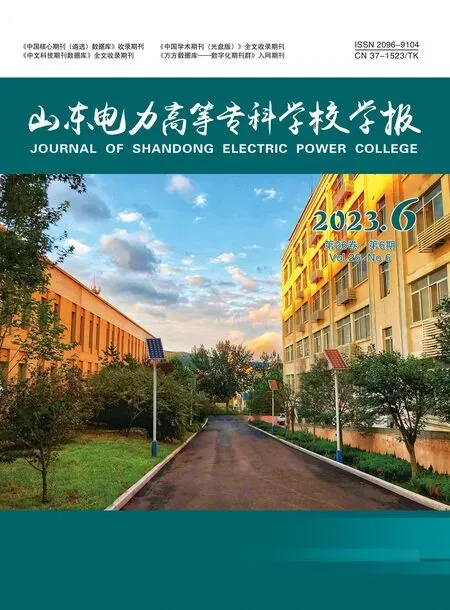
图3(a)、图3(b)、图3(c)分别为电容输出电压、电感电流、系统控制信号的波形图。由图3 可见,应用本文所提的控制策略后,系统电压、电流及控制信号能够快速运行到平衡点,并保持稳定。系统在0.004 s 时达到平衡,电容输出电压能够快速输出目标电压60 V,达到平衡前最高上升至63 V,最大偏差为3 V,仅为平衡电压的5%,与目标值的偏差较小。
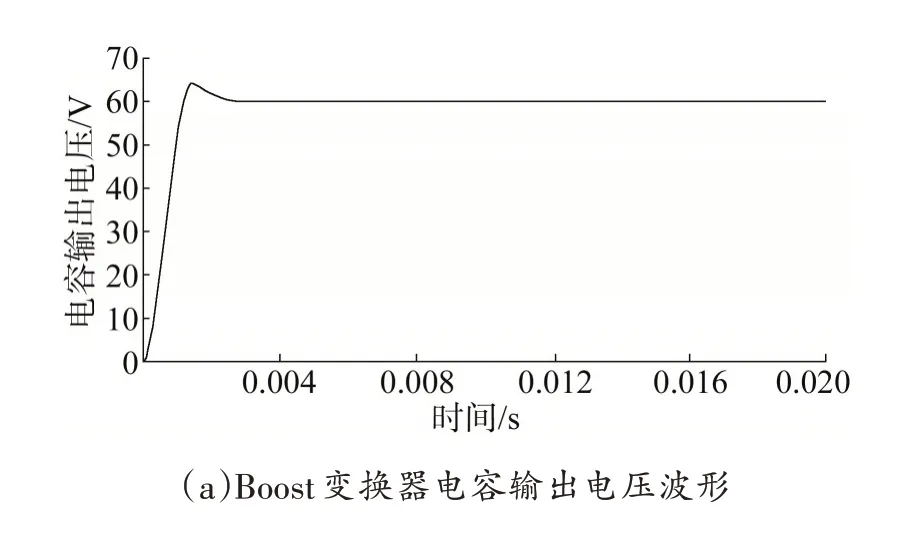

图3 Boost变换器动态响应
3.2 控制系统的鲁棒性验证
在实际应用中,Boost 变换器的输入电压和负载有时会突然发生变化,此时需要验证系统的鲁棒性。
图4(a)和图4(b)分别为输入电压跃变时电容输出电压和电感电流的响应过程。系统达到稳定状态之后,0.01 s 时将输入电压由37.5 V 提升至50 V,0.015 s 时将输入电压恢复至37.5 V,电压调节量为12.5 V,占稳定输入电压的25%。由图4(a)可见,输入电压变化后,电容输出电压波动小于2 V 且均在0.002 s 内恢复正常。在输入电压变化25%的情况下,电容输出电压变化量仅为目标值的3.3%,验证了本文所提控制策略对输入电压变化的鲁棒性。

图4 输入电压跃变时电容输出电压和电感电流的波形
图5(a)和图5(b)分别为负载电阻跃变时电容输出电压和电感电流的响应过程。系统达到稳定状态之后,0.01 s 时将负载电阻由50 Ω 降低至30 Ω,0.015 s 时将负载电阻恢复至50 Ω,电阻调节量为40%。由图5(a)可见,负载电阻变化后,电容输出电压波动小于7 V 且在0.0025 s 内恢复正常。在输入电压变化40%的情况下,电容输出电压变化量仅为目标值的11.7%,验证了所提控制策略对负载电阻变化的鲁棒性。
图5 负载电阻跃变时电容输出电压和电感电流的波形
由此可见,所提控制策略对输入电压和负载电阻变化的动态响应非常迅速,电容输出电压能够很好地跟踪目标电压,系统具有良好的鲁棒性。
3.3 控制器参数选择
参数α和k1影响系统的收敛速度,可通过调节α和k1来改善系统的响应过程。图6(a)为不同α值对应的电容输出电压波形,由该图可见,增大α能够加快系统的收敛速度,但是会使收敛过程中电容输出电压实际值与目标值的偏差增大。图6(b)为不同k1值对应的电容输出电压波形,由该图可见,增大k1会减小收敛过程中电容输出电压实际值与目标值的最大偏差,但延长了系统的收敛时间。要综合考虑各个参数对系统响应过程的影响,合理取值,以达到最好的控制效果。

图6 α和k1变化时电容输出电压波形
4 结语
本文将终端滑模控制器应用于Boost 变换器中,使电容输出电压快速跟踪目标电压,减小了响应过程中状态量数值与目标值的最大差值,实现了良好的控制性能。同时,设计了负载观测器以增强系统对输入电压和负载变化干扰的鲁棒性。仿真结果表明,当发生较大干扰时,本文所提控制策略能够使电容输出电压在较小的变化区间内快速趋于稳定,具备较好的鲁棒性。
猜你喜欢
延安大学学报(自然科学版)(2021年3期)2021-10-13
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
大连理工大学学报(2017年6期)2017-11-22
中学物理·高中(2016年12期)2017-04-22
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04