基于Mask RCNN与改进BP神经网络联合算法的变压器套管红外热故障诊断
2024-01-08 06:49李雪寒刘沁怡杨晓彤胡海敏王哲铭周文强
上海电力大学学报 2023年6期
李雪寒, 刘沁怡, 杨晓彤, 胡海敏, 王哲铭, 周文强, 卢 武
(1.上海电力大学, 上海 200090; 2.国网上海市电力公司浦东供电公司, 上海 200122;3.国网上海市电力公司市区供电公司, 上海 200080)
变压器是变电设备的核心,而套管是其重要组成部分,担任着固定引线和与外界绝缘的作用。根据2015年国际大电网会议(CIGRE)A2.37工作组统计的变压器故障起因报告,电压等级越高,由套管引起的变压器故障比例越大,当电压等级为500 kV及以上时,该比例达到27.8%[1]。套管一旦出现故障便会导致变压器停运,严重时甚至会引发火灾爆炸,因此套管运行状态的准确评估对保证电力设备的安全运行起着至关重要的作用。
常用的套管故障检测方法包括介质损耗法[2]、超高频法[3]以及红外图像诊断法[4]等。介质损耗法需要在变压器停运的条件下进行预防性试验,缺乏可靠性和时效性,而超高频法则不易实现故障定位。由于设备故障时温度会快速升高,基于这一特点,红外图像诊断法可以将套管快速从背景中识别出来,进而准确地实现套管故障状态诊断。
近年来,国内外学者展开的基于红外图像缺陷智能诊断研究主要包括目标识别和目标状态诊断两方面。目标识别主要利用区域分割[5]、阈值分割[6]等算法实现红外图像中目标与背景的分割,但只适用于简单背景。深度学习理论为研究人员带来了新思路。李文璞等人[7]利用Faster R-CNN(Region-based Comolutional Neural Networks)算法联合温度阈值算法实现了变电设备红外图像缺陷识别;王万国等人[8]利用Faster R-CNN算法识别无人机巡检图像中的电力设备部件等。目标状态诊断主要在红外图像识别的基础上结合深度学习实现故障诊断。例如廖志伟等人[9]利用红外图像处理技术分割提取绝缘子串,之后引入K-means聚类算法和BP(Back Propation)神经网络实现对绝缘子串低零值故障和污秽故障的诊断。
目前,针对套管的目标识别,现有的图像处理算法已经可以实现对目标的框选,但由于分割框包含范围较大,易导致对小目标和多目标识别精度不佳。对此本文采用基于Faster R-CNN改进而来的Mask R-CNN模型,实现对目标快速准确地识别和对套管的精细化掩模分割。同时,针对红外图像中“色-温”关系不对应的问题,提出选取灰度值作为特征值。然后,使用粒子群优化(Particle Swarm Optimization,PSO)算法优化BP神经网络(PSO-BP),对套管特征进行分类识别。最后,在实际应用中验证了方法的可行性与准确性,为变电设备红外图像识别及其状态评估问题提出了解决方案。
1 变压器套管状态诊断算法
1.1 总体框架
本文采用基于红外图像的变压器套管进行故障诊断,算法的框架流程如图1所示。其中,CNN表示卷积神经网络,RPN表示区域生成网络(Region Proposal Network,RPN)。整个算法主要包含套管轮廓提取算法和变压器套管状态诊断模型两部分。其中,套管轮廓提取算法基于Mask R-CNN算法对变压器套管进行识别和精细化掩模分割;变压器套管状态诊断模型先对套管分割图像进行特征提取,再利用PSO-BP神经网络对其进行聚类分析,建立聚类模型,实现套管的状态诊断。
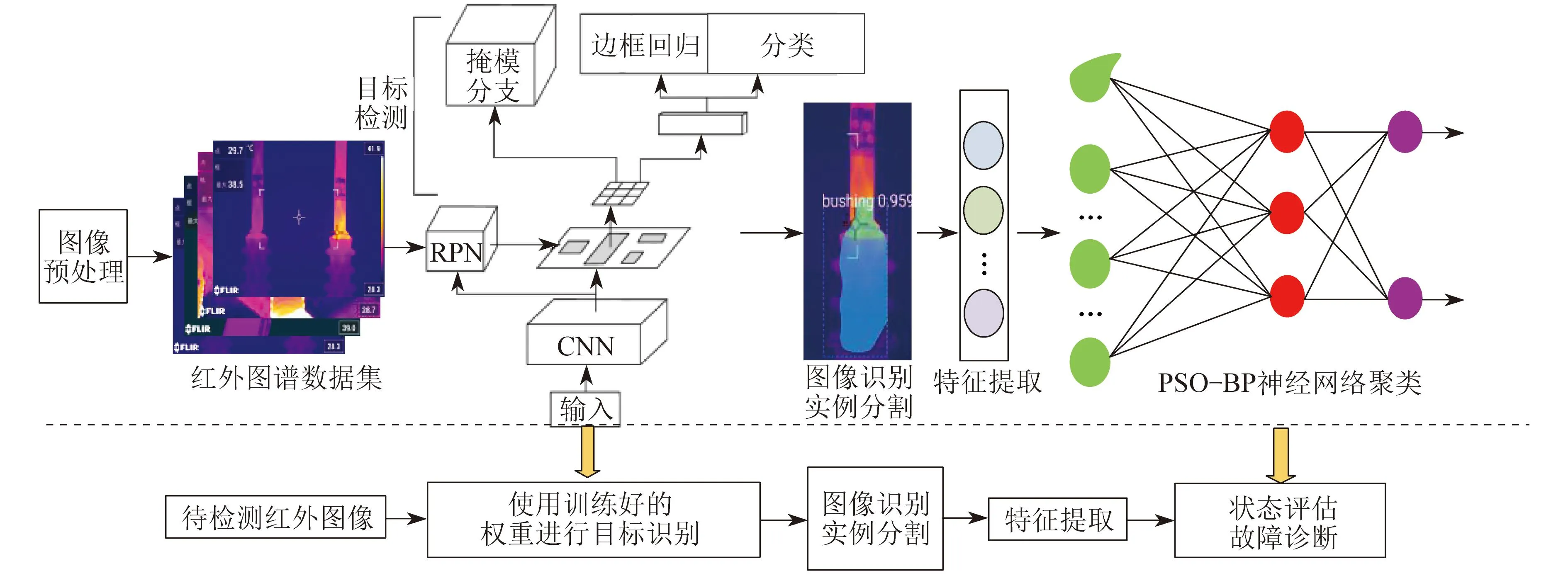
图1 基于红外图像的变压器套管状态诊断算法
1.2 套管轮廓提取算法
Mask R-CNN算法是对Faster R-CNN算法的改进,增加了掩模分支,可以同时实现目标检测和掩模分割,具有鲁棒性强、识别精度高的特点[10]。该网络由特征提取模块、RPN模块、感兴趣区域(Region of Interest,ROI)模块和输出预测模块4部分组成[11]。
其中,特征提取模块由ResNet残差网络和特征金字塔网络(Feature Pyramid Networks,FPN)组成。ResNet残差网络将输入与经过卷积层处理后的输出进行特征值相加;FPN可以将底层信息和高层语义特征信息进行融合[12]。之后利用RPN扫描ResNet50-FPN生成的多层特征图以提取ROI。在Faster R-CNN算法中采用ROI池化法(ROI Pooling)将上一步提取到的ROI映射到特征图上,但这些ROI的大小不一致,无法直接进行后续处理,此时需要ROI Pooling层将其转为固定尺寸大小,当无法整除时就采用四舍五入法,导致位置回归生成的候选框与目标真实位置存在偏差,影响了算法对目标物体的识别精度。为了消除这种误差,在Mask R-CNN算法采用的ROI聚集法(ROI Align)中取消量化操作,使用双线性插值算法,从而能更好地对齐原图上的ROI区域,使算法对小目标的定位和识别更加精确。其原理如图2所示。

图2 ROI Align双线性插值算法原理
图2中,P点为整个ROI中任意一点,点1~点4为P点最邻近的4个点。
双线性插值算法的公式为
(1)
式中:f(x,y)——待求点P的像素值;(x1,y1)、(x1,y2)——点1和点2的坐标;(x2,y1)、(x2,y2)——点3和点4的坐标;f(1)、f(2)、f(3)、f(4)——点1~点4的像素值。
输出预测模块包含了类别、位置和掩模预测层。在Mask R-CNN训练时,该网络的多任务损失函数L定义为
L=Lcls+Lbox+Lmask
(2)
Lcls(p,u)=-logpu
(3)
(4)
(5)
式中:Lcls、Lbox、Lmask——分类损失、回归损失、平均二值交叉熵损失;
p、u、t、v——目标对象、目标类别标签、预测边界框回归的偏移、边界框回归目标;
pu——边界框被预测为含有目标的概率;
SmoothLi——平滑损失函数;

(i,j)——像素坐标。
1.3 变压器套管状态诊断模型
本文利用BP神经网络对变压器套管进行状态诊断。BP神经网络是以输入层、隐藏层和输出层为主要结构的前馈神经网络,非线性映射能力强,网络结构灵活,在聚类分析领域具有广泛应用。
PSO算法是对BP神经网络的权值和阈值进行优化的常用方法。PSO-BP算法流程如图3所示。PSO算法的本质是全局寻优,整个过程通过个体运动状态的不断反馈来寻找最优解。对每个个体设置适应度值,其中个体极值指单个的历史最优解,群体极值指所有个体寻找的适应度值最优位置[13]。
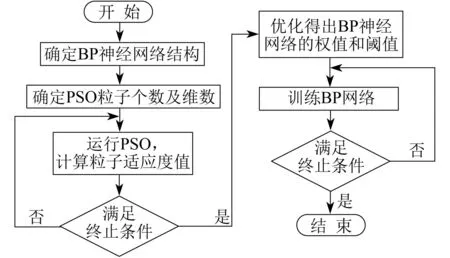
图3 PSOBP算法流程
PSO-BP算法中PSO优化算法原理如下:全局寻优,假设粒子总数为n,则第l个粒子的位置和速度以及对应的个体极值和群体极值为
Xl=[Xl1,Xl2,…Xld,…,XlD]T,Xld∈[Ld,Ud]
(6)
Vl=[Vl1,Vl2,…Vld,…,VlD]T,Vld∈[-Vmax,Vmax]
(7)
Pl=[Pl1,Pl2,…Pld,…,PlD]T
(8)
Pg=[Pg1,Pg2,…Pgd,…,PgD]T
(9)
式中:Xl、Vl——粒子的位置、速度;Ld、Ud——空间的下界和上界;Vmax——粒子飞行的最大速度;Pl、Pg——个体极值、群体极值;PlD——第l个粒子在D维空间中迄今为止搜索到的最优位置;
PgD——整个粒子群在D维空间中迄今为止搜索到的最优位置。
粒子的速度和位置的迭代更新公式如下:
(10)
(11)
式中:ω——惯性权重;k——当前迭代次数;c1、c2——加速度因子,分别控制飞往最优个体和群体的距离,通常取2;
r1、r2——分布在[0,1]的随机值。
2 变压器套管故障识别过程
2.1 红外图像数据集及预处理
本文使用的原始数据来自国网上海市供电公司的彰武站、余姚站和凤阳站等110 kV等级变压器套管的红外图像库。套管正常和典型故障状态图像如图4所示。图像类型包括正常、介质损耗故障、接头故障、漏油故障。介质损耗故障由绝缘油中的水分或局部放电引起,导致整个套管体温度升高。接头故障通常是由接头连接不良引起,导致接头上过热。漏油大多由机械密封不良引起,会导致套管底部温度高于顶部温度。
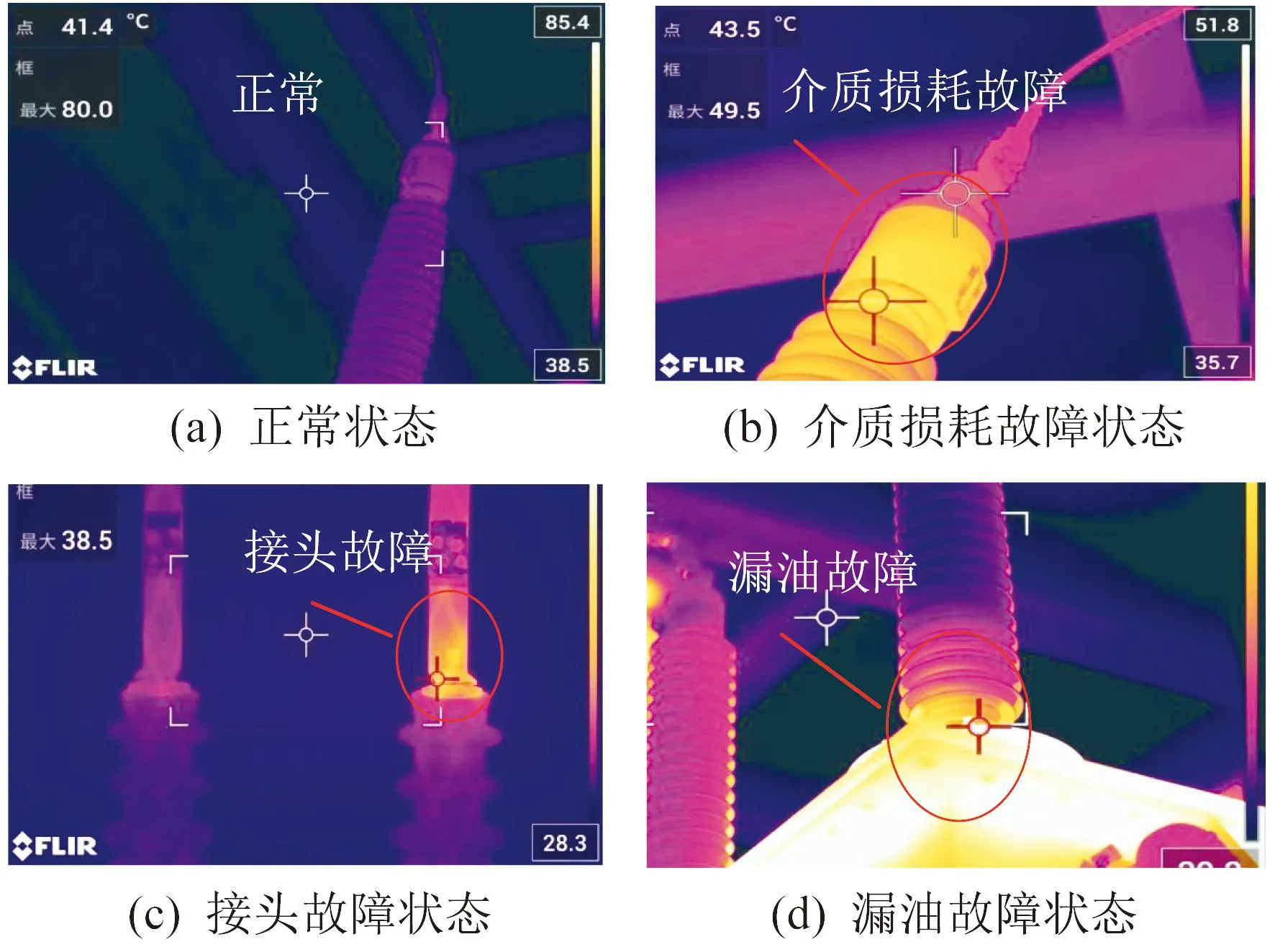
图4 套管图像
目标识别类模型的准确性需要大量的实验样本,但实际应用中,直接获取海量的图像数据较困难。因此,在对Mask R-CNN模型进行训练之前,需要对原始数据进行扩增,本文采用数据增广算法。数据增广是一种有效的正则化方法,通过对原有数据进行变换操作,可产生大量与原数据相似的数据,使模型获得更好的泛化性[14]。为解决各种故障类型图像与正常图像之间比例的不均衡容易造成训练的过拟合问题,本文在数据增广时使各种类别样本的数量相同。常用的数据增广方法有镜像、旋转、增减噪声等。按8∶2的比例划分为训练集和验证集。数据增广后的各类型图像数量和效果如表1和图5所示。由表1可知,原图共284张,扩增图像280张,扩增后图像共564张。
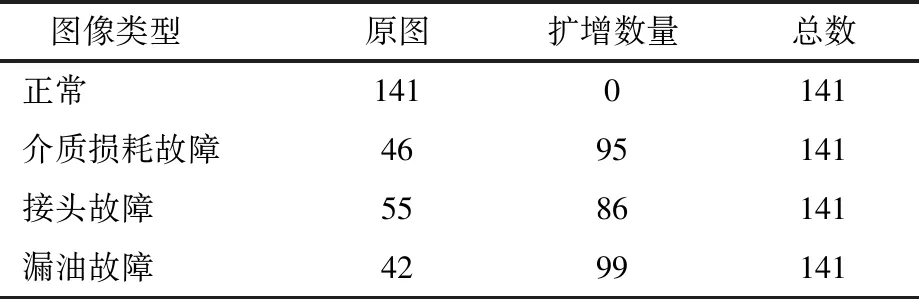
表1 数据增广后各类型图像数量 单位:张
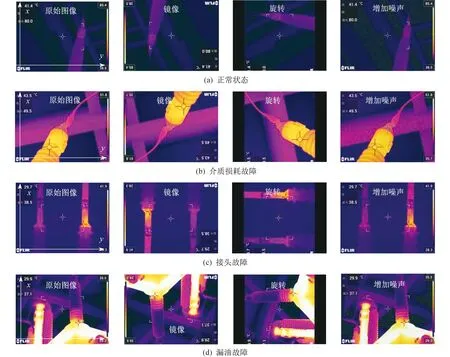
图5 数据增广效果
2.2 特征值提取
大量研究表明,红外图像处理的最终效果与原始图像的色彩分布紧密相连。为了能呈现更多细节,红外成像设备一般会对温度和图像颜色进行自适应调整,且温度矩阵源文件也较难获取,这就导致红外图像“色-温”不一致问题的出现。针对这一问题,本文选取灰度值作为输变电设备红外图像的状态特征。
加权平均法是转变为灰度图像常用的方法之一。原理是对红、绿、蓝3个颜色通道R、G、B赋予不同的权重Wr、Wg、Wb,令R=G=B=WrR+WgG+WbB。权重不同,得到的结果不同,但由于人眼对绿色敏感度最高、红色次之、蓝色最低,因此通常Wg>Wr>Wb。经过多次的实验验证,当Wr=29.9%,Wg=58.7%,Wb=11.4%时得到的图像最为合理。同时0.299+0.587+0.114=1,刚好是满偏,按此比例加权平均能够得到较合理的灰度图像。因此,灰度值Gray的公式如下
Gray=R·0.299+G·0.587+B·0.144
(12)
在Mask R-CNN算法分割出的图像区域中,
(13)
式中:P(I)——灰度为I图像区域中一阶直方图;
n(I)——灰度为I的像素数量;
N——像素总数。
若将中心线上每一点的灰度值进行提取,会包含大量冗余信息,所以等间距选取10个中心线灰度值;另外,灰度方差表示离散程度,异常状态导致相对温差较大,因此,还需要选取平均灰度、灰度方差、灰度最高值和最低值。中心线特征值提取过程如图6所示。

图6 中心线特征值提取过程
2.3 模型评估
精确率(Precision)P和召回率(Recall)R可以作为衡量模型性能的指标,其计算公式如下
(14)
(15)
式中:TP——正确检测的套管个数;FP——背景被误预测的套管个数;FN——未被识别的套管个数。
本文设置判断预测结果正确与否的阈值为0.5,使用平均精度均值(Mean Average Precision,mAP)来评估模型整体精度。
P-R曲线如图7所示,以召回率R为横轴,精确率P为纵轴,将不同阈值下的精确率和召回率连接起来形成一条曲线,其表达式为P(R)。

图7 PR曲线
通过对P-R曲线进行积分,可以计算mAP,即
(16)
当M为无穷大时,

(17)
3 实验结果与分析
3.1 环境配置
本文采用基于Mask R-CNN算法的实例分割模型对套管红外图像进行分割,采用的网络环境配置如表2所示。

表2 网络环境配置
3.2 模型训练
本文采用Mask R-CNN算法对构建的数据集进行训练,初始学习率为0.001,对其训练30轮和50轮,损失函数变化曲线如图8所示。由图8可以看到,训练50轮后的损失值明显低于训练30轮时,此时的损失值可以达到0.119 9。

图8 损失函数变化曲线
3.3 结果分析
对测试集进行迭代训练后,将模型用于不包含训练集中的图像进行目标分割测试。部分变压器套管分割结果如图9所示。
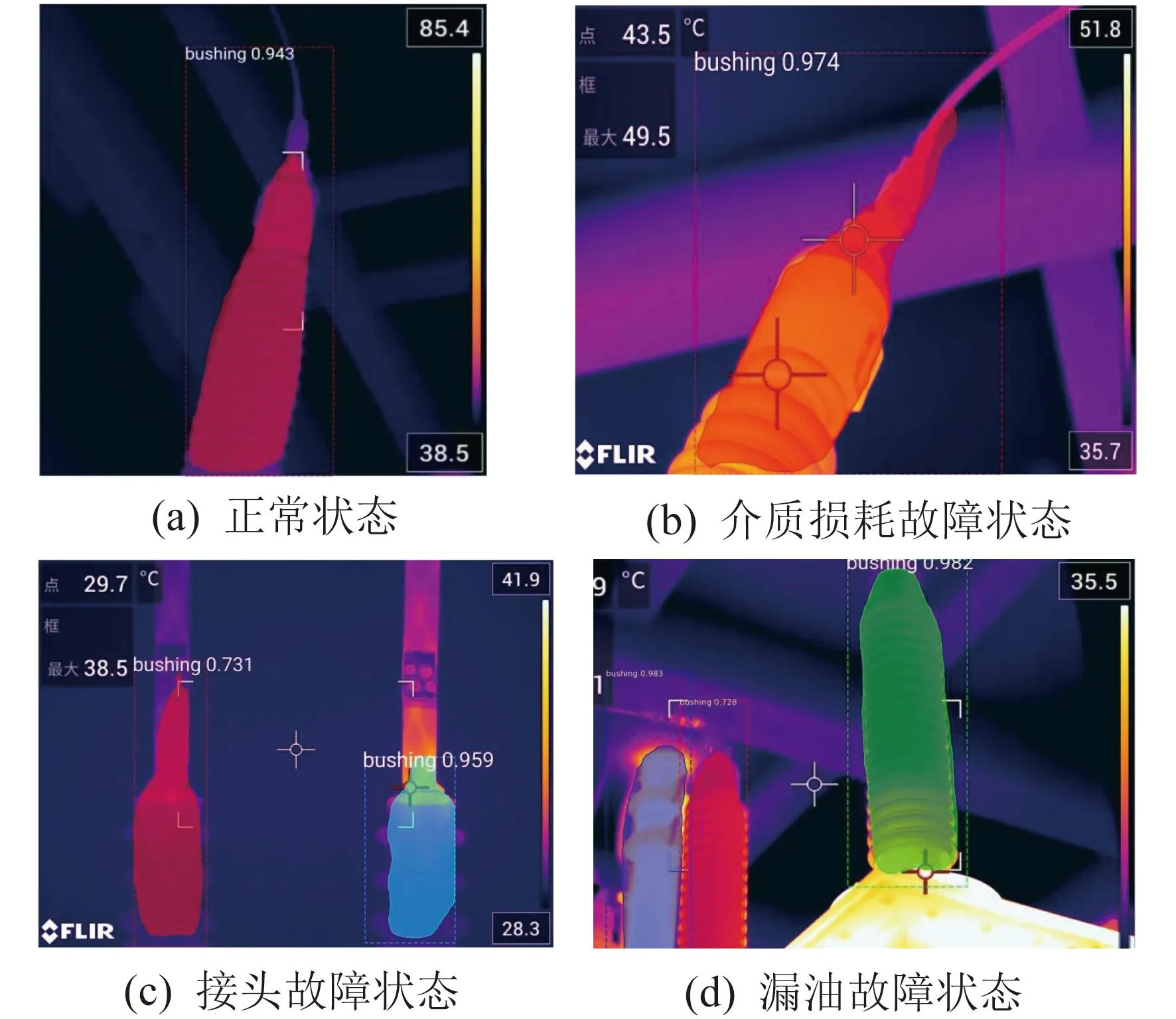
图9 部分变压器套管分割结果
结果表明,Mask R-CNN算法能够对目标进行快速准确地识别,完成目标轮廓的分割并生成掩模,其平均精度均度mAP可以达到0.91。


图10 PSOBP算法迭代误差变化过程
由图10可知:在设定初始权值和阈值的条件下,PSO-BP算法在迭代大概15次时,误差急剧下降;在大约15次迭代后,PSO算法的适应度值达到稳定,体现了该算法缺陷识别的高效性。
同时,将108组测试集的特征参数作为输入,对套管的状态进行预测。测试数据的混淆矩阵如图11所示,预测结果如表3所示。

表3 PSOBP算法的预测结果

图11 测试数据的混淆矩阵
27张测试样本中有4处识别错误,其中3处接头故障被误分为漏油故障,1处漏油故障被误分为接头故障。表3的结果表明,该方法可以对变压器套管的不同故障状态进行准确识别,故障诊断的平均准确率可达93.518%。为了进一步验证本文算法的优势,将其与传统BP算法和支持向量机(Support Vector Machine,SVM)算法进行对比。BP算法和SVM算法都是常见的故障诊断算法,使用的都是经Mask R-CNN算法分割后的相同训练数据。预测结果对比如表4所示。
由表4可知,SVM算法的故障诊断平均准确率为87.963%,而在同样的条件下,传统BP神经网络算法只有72.773%,二者均远低于PSO-BP算法的93.518%。总的来说,PSO-BP算法在很大程度上提高了预测的精度。
4 结 语
针对目前红外诊断检测效率低、背景干扰多等问题,本文提出了一种基于Mask R-CNN的变压器套管故障诊断方法,实现目标物体的像素级分割。选取灰度值作为特征值解决红外图像中“色-温”关系不对应问题,使用PSO-BP神经网络对套管4种典型图像类型进行分类识别,故障诊断准确率可达93.518%,优于传统算法。因此,该算法在电力设备红外图像分割领域具有良好的应用前景,可以极大地提高电力设备故障分析工作的效率和准确率。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
环球时报(2022-05-23)2022-05-23
云南化工(2021年10期)2021-12-21
海洋石油(2021年3期)2021-11-05
建材发展导向(2021年7期)2021-07-16
高技术通讯(2021年3期)2021-06-09
金桥(2021年4期)2021-05-21
电子制作(2019年7期)2019-04-25
自动化学报(2017年5期)2017-05-14
光学精密工程(2016年3期)2016-11-07