结构-形状记忆合金惯容器协同系统的控制性能
2024-01-10 01:41孙晓东曹黎媛李春祥马汝为
振动工程学报 2023年6期
孙晓东,曹黎媛,李春祥,马汝为
(上海大学力学与工程科学学院土木工程系,上海 200444)
引言
在地震、极端风等激励作用下,结构会产生过大的振动响应。为有效降低结构的振动响应,对结构振动控制的研究必不可少[1-2]。近年来,由于形状记忆合金(SMA)具有优越的超弹性特性和形状记忆效应,在土木工程领域得到了广泛的研究及应用[3]。SMA 能控制由地震或风引起的结构振动,并能够降低结构的残余变形,被认为是控制结构振动的理想材料[4]。许多学者对SMA 阻尼器及其减振性能开展了系统性研究。Shi 等[5]提出了一种自定心防屈曲支撑(Self-Centering Buckling-Restrained Brace,SC-BRB),它由基于SMA 拉索的自定心系统和全钢BRB 组成;研究给出了SC-BRB 中SMA 拉索的理想退火方案和训练程序,并对SC-BRB 的力学性能进行了数值模拟和参数研究。谭平等[6]提出了基于SMA-压电阻尼器的巨-子结构智能控制体系,研究表明这种智能体系可有效提高巨-子结构的抗震安全性。李祥秀等[7]提出了在巨-子结构隔震层处或子结构顶部与主结构连接处施加SMA-压电智能复合阻尼器,形成一种巨-子结构智能隔震体系,并对该体系的抗震性能进行了研究。展猛等[8]研发了一种SMA 压电混合减震装置,并对其进行了减震控制试验及数值分析研究。钱辉等[9]研制开发了一种自复位形状记忆合金复合摩擦阻尼器,将其应用于偏心结构并进行了振动台试验研究。在Smith[10]提出惯容器(Inerter)概念之后,学者们开展了各种带有惯容器的耗能减振装置研究,例如调谐黏滞质量阻尼器(Tuned Viscous Mass Damper,TVMD)[11]、调谐惯 容器阻尼器(Tuned Inerter Damper,TID)[12]、调谐质 量阻尼 器惯容器(Tuned Mass Damper Inerter,TMDI)[13],串并联调谐质量阻尼器惯容器(Tuned Tandem Mass Dampers-Inerters,TTMDI)[14]。为充分 挖掘SMA 的优 势,Zhang 等[15]提出了一种惯容增强自定心阻尼系统(Inerter-enhanced Self-Centering Damping System,ISCDS),该系统在基于SMA 的自定心阻尼器基础上并联添加一个杠杆式惯容器(Lever-Based Inerter,LBI),研究结果表明,与SCDS 相比,ISCDS 加固的桥梁排架在减少自定心材料的使用、降低最大加速度和降低最大基底剪力方面具有明显的优势。Tiwari 等[16]提出了SMA-TMDI,并将其用于控制连体单自由度结构的地震响应。Zhang 等[17]提出了一种SMA阻尼惯容器(Shape Memory Alloys Damper Inerter,SDI),并将其用于单自由度结构的减震控制。为发挥传统形状记忆合金阻尼器和惯容器的协同作用,进一步提高其有效性和鲁棒性,使其能够广泛地应用于实际工程中,在上述研究的基础上提出了一种形状记忆合金惯容器(Shape Memory Alloy Inerter,SMAI)系统。运用随机等效线性化方法以及定义的结构-SMAI 系统均方位移目标函数,在频域内对SMAI 系统进行了迭代优化分析,进一步在时域内验证了其控制性能。
1 结构-SMAI 系统
1.1 形状记忆合金
超弹性SMA 是SMAI 系统的重要组成部分,先讨论其力-变形关 系。Yan 等[18]提出的改进SMA本构关系,已经在一些研究中[14]得到广泛应用。
超弹性SMA 的具体力-变形关系如图1 所示。

图1 超弹性SMA 的力-变形关系Fig.1 Force-deformation relationship of the super-elastic SMA
在该本构关系中,SMA 元件的非线性恢复力表示为:
式中φ为SMA 屈服后与屈服前的刚度比(即SMA 在马氏体中的刚度与奥氏体中的刚度之比);kSMA为SMA 在奥氏 体中的 初始刚 度;xt为SMA 的位移;zs为迟滞位移,由下式给出:
式中a和b分别为奥氏体相变的弹性极限和触发马氏体相变的位移极限;sign(x)表示符号函数,由如下公式确定:
采用随机等效线性化方法,将式(2)中的非线性项zs替换为等效线性化形式zeq,则Yan 等[18]本构关系的随机线性化形式为:
式中keq和ceq为等效线性系数。
使实际非线性zs与等效线性化zeq之间的均方误差最小化:
式中 E 表示期望算子。
求解式(5)和(6),keq和ceq可以分别表示为:
将式(2)分别代入式(7)和(8)可得:
式中和分别为xt和的均方根值;er(fx)为误差函数。
将式(4)代入式(1),SMA 恢复力的等效形式为:
SMA 的随机等效阻尼、刚度和恢复力可分别表示为:
1.2 惯容器
惯容器是SMAI 系统的重要组成部分,是一种两端点元件,其输出力与两端的相对加速度成正比。惯容元件的两个端点的相对加速度可以通过改变内部组件的运动形式来实现,如平动-转动转换[11]的改变等方式。其物理实现形式以平动-转动转换装置最为多见,此类惯容又称机械式惯容。机械式惯容的惯容系数本质上是转动惯量进行等效平动化的宏观参数。目前常见的机械式惯容器类型是齿条齿轮机构。图2 所示为齿条齿轮飞轮装置,该系统由两个半径为Ri和质量为mi(i=1,2)的飞轮组成,可自由旋转,通过小齿轮机构连接到直线齿条。

图2 惯容器物理实现模型Fig.2 Physical implementation model of inerter
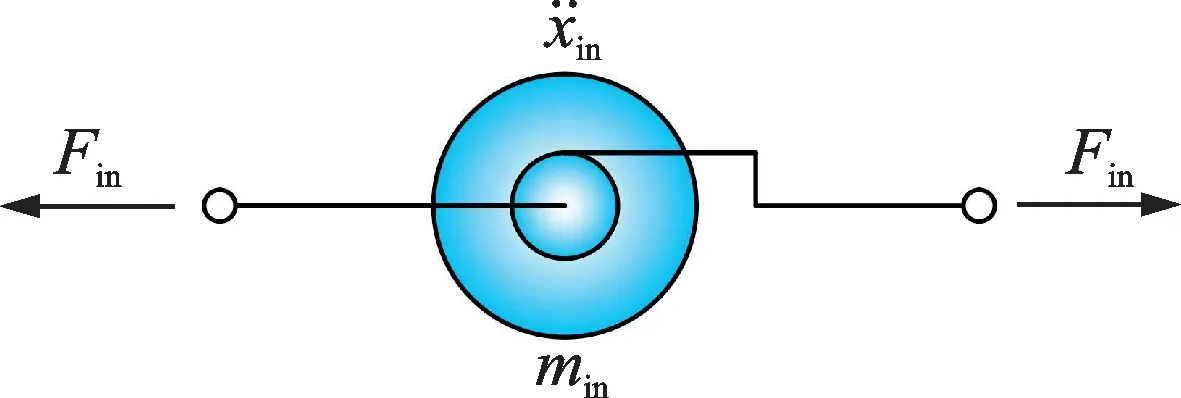
图3 惯容器力学模型Fig.3 Mechanical model of inerter
式中min为惯容器的表观质量(或称为惯性系数)。
1.3 SMAI 系统
目前形状记忆合金阻尼器存在SMA 变形量小或 SMA 利用率低的缺点,并不能充分发挥SMA 的潜在性能,所以考虑将SMA 与惯容器相结合,利用惯容器的负刚度效应实现SMA 有效变形的放大,起到耗能增效的作用,以进一步抑制结构响应。为更好地利用惯容器实现结构减振的目的,通常惯容器需要有耗能元件的配合。SMA 拥有超弹性特性和高阻尼特性,是理想的耗能元件,所以考虑将SMA 与惯容器协同工作组成SMAI 系统,该系统是有效可行的耗能减振装置。SMAI 系统的力学模型如图4(b)中红色虚线框所示。

图4 外激励作用下无控单自由度结构的力学模型及外激励作用下单自由度结构-SMAI 系统的力学模型Fig.4 Mechanical model of uncontrolled SDOF structure under external excitation and mechanical model of SDOF structure-SMAI system under external excitation
黏滞阻尼器是目前工程中常用的耗能减振装置,但是存在价格偏高、密封性不佳及耐久性差等问题,特别是内部材料处于压缩状态时会产生动态刚度而影响其性能,并且在工程应用中也常常面临着诸如老化、可靠性差、维护成本高等问题,这些都会影响其减振性能并增加后期维护成本[19-21]。而SMAI 系统中惯容的耗能增效特性会提高其耗能效率,并且SMA 具有抗疲劳、高耐久性等优点[3-4]。因此在工程抗震、抗风领域中,SMAI 系统相较于黏滞阻尼器将具备更优的减振控制性能和更低的后期维护成本。
1.4 结构-SMAI 系统的动力方程
在外激励作用下结构-SMAI 系统的力学模型如图4(b)所示。SMAI 系统由惯容器和SMA 两部分组成。外激励作用下结构-SMAI 系统的运动微分方程为:
式中ms,cs和ks分别为结构的质量、阻尼和刚度;xs为结构相对于地面的位移;Fin为惯容器的反力;P(t)为一随机激励。

图5 结构-SMAI 的简化形式Fig.5 Simplified form of structure-SMAI
在外激励下结构-SMAI 系统的运动微分方程可重新整理为:
式中ωs为结构固有频率;ζs为结构阻尼比;β为惯容质量比;ξ(t)为功率谱密度为恒定S0的理想白噪声;F0为SMA 弹簧的归一化转换强度;Fys为转换强度;uyt为触发SMA 正向相变的位移。
将上述变量代入式(15)可得:
对结构-SMAI 系统的位移、速度、加速度响应以及外激励进行拉普拉斯变换:
运用上面的拉普拉斯变换算子对式(17)进行拉普拉斯变换得:
推导出结构-SMAI 系统中结构和惯容器的相对位移传递函数分别为:
根据随机振动理论[17]得到确定性线性系统的输出功率谱SXp(ω)为:
式中 输入功率谱为白噪声谱,即SF(ω)=S0,其中S0为白噪声功率谱密度。
使用式(20)和(21),结构-SMAI 系统的位移方差可表示为:
结构的响应可表示为:
式(22)可以表示为[16]:
结构-SMAI 系统的频响函数绝对值平方可以表示为:
比较式(25)与(24),可知m的值为4,式(25)分子和分母中的系数可由下式求解出:引入变量:
在功率谱密度为S0的白噪声激励作用下,结构-SMAI 系统的位移方差可表示为[18]:
2 结构-SMAI 系统的参数分析
为了能够研究SMAI 系统内不同设计参数对其减振控制性能的影响,对结构-SMAI 系统进行相应的参数分析。这里参数分析所用的量化指标γx(s即位移响应减振比)定义为:结构-SMAI 系统与无控结构的均方位移之比。γxs比值越小,代表SMAI 的控制性能越好。
参数分析所考虑的结构参数和相关参数范围如下:
结构参数:ωs=0.5 Hz,ζs=1%,ms=25000 kg;SMAI 系统的设计参数考虑为[16-17]:φ∈[0.01,0.1],F0∈[0.1,0.5],β∈[0.05,0.1,0.2];SMA 参数:a=0.005 m,b=0.02 m,uyt=0.02 m。
图6 为白噪声功率谱密度S0=0.01 m2/s3和不同惯容质量比β下结构-SMAI 系统的γxs等值线图,其中不同的颜色区域代表不同的位移响应减振比γxs。图6 中的冷色区(紫色和蓝色)代表参数组合为最有利的区域,而暖色区(红色、黄色和橙色)代表参数组合为最不利的区域。
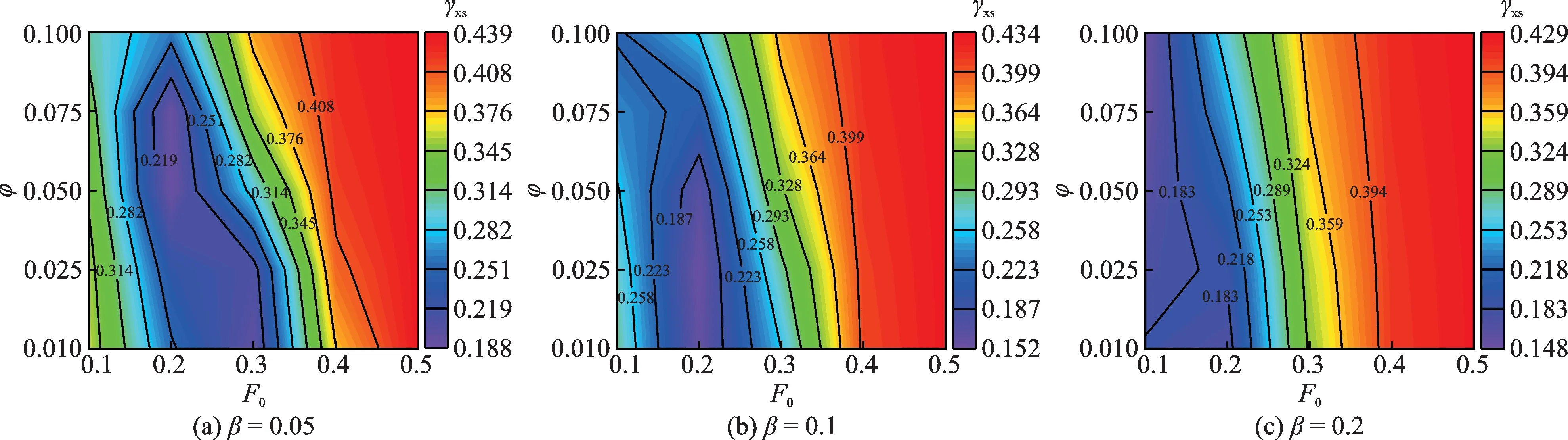
图6 S0=0.01 m2/s3和不同β 值下结构-SMAI 系统的γxs等值线图Fig.6 Contour plots of γxs of structure-SMAI system under S0=0.01 m2/s3 and different values of β
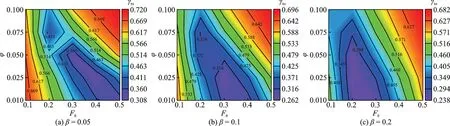
图7 S0=0.03 m2/s3和不同β 值下结构-SMAI 系统的γxs等值线图Fig.7 Contour plots of γxs of structure-SMAI system under S0=0.03 m2/s3 and different values of β
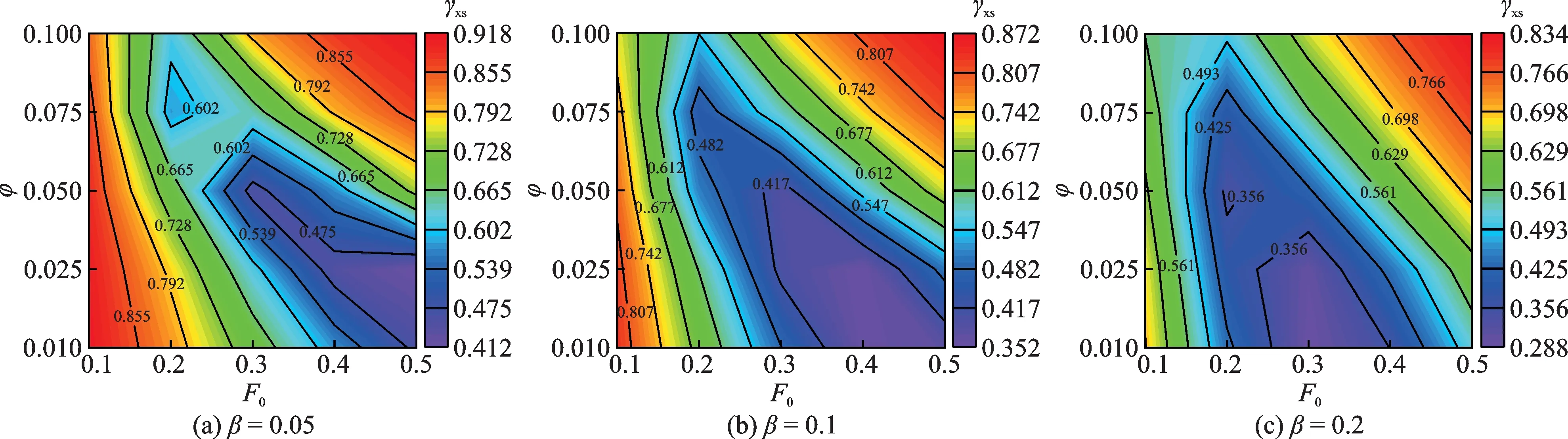
图8 S0=0.05 m2/s3和不同β 值下结构-SMAI 系统的γxs等值线图Fig.8 Contour plots of γxs of structure-SMAI system under S0=0.05 m2/s3 and different values of β
对图6~8 进行综合分析,可以得出以下结论:
(1)γxs对φ相对不敏感,而对F0较为敏感;
(2)在相同功率谱密度的白噪声激励下,随着β增大,参数组合的有利区域显著向左移动(即对F0的需求值逐渐降低);
(3)不同S0条件下的γxs变化趋势大致相同;
(4)随着S0增加,在相同β下,参数组合的有利区域呈右移趋势,即随着S0增加,对F0值的需求逐渐增加。
3 SMAI 系统的优化
3.1 优化准则
本节研究的重点是通过减小结构位移响应来保护结构的完整性和安全性,因而目标函数定义为:装配有结构-SMAI 系统的无量纲位移均方差。目标函数可以度量SMAI 系统的控制性能,通过使结构的无量纲位移均方差最小化可以得到SMAI 系统相应的最优参数,所以SMAI 系统的优化准则为[16]:
式中L=[φ,F0],Llb为参数取值的下界,Lub为参数取值的上界。一般来说,min.Rs值越小,结构位移控制的有效性越高。
3.2 迭代优化流程

表1 不同功率谱密度S0下SMAI 系统的最优设计参数Tab.1 Optimal design parameters of the SMAI system with different values of power spectral density S0
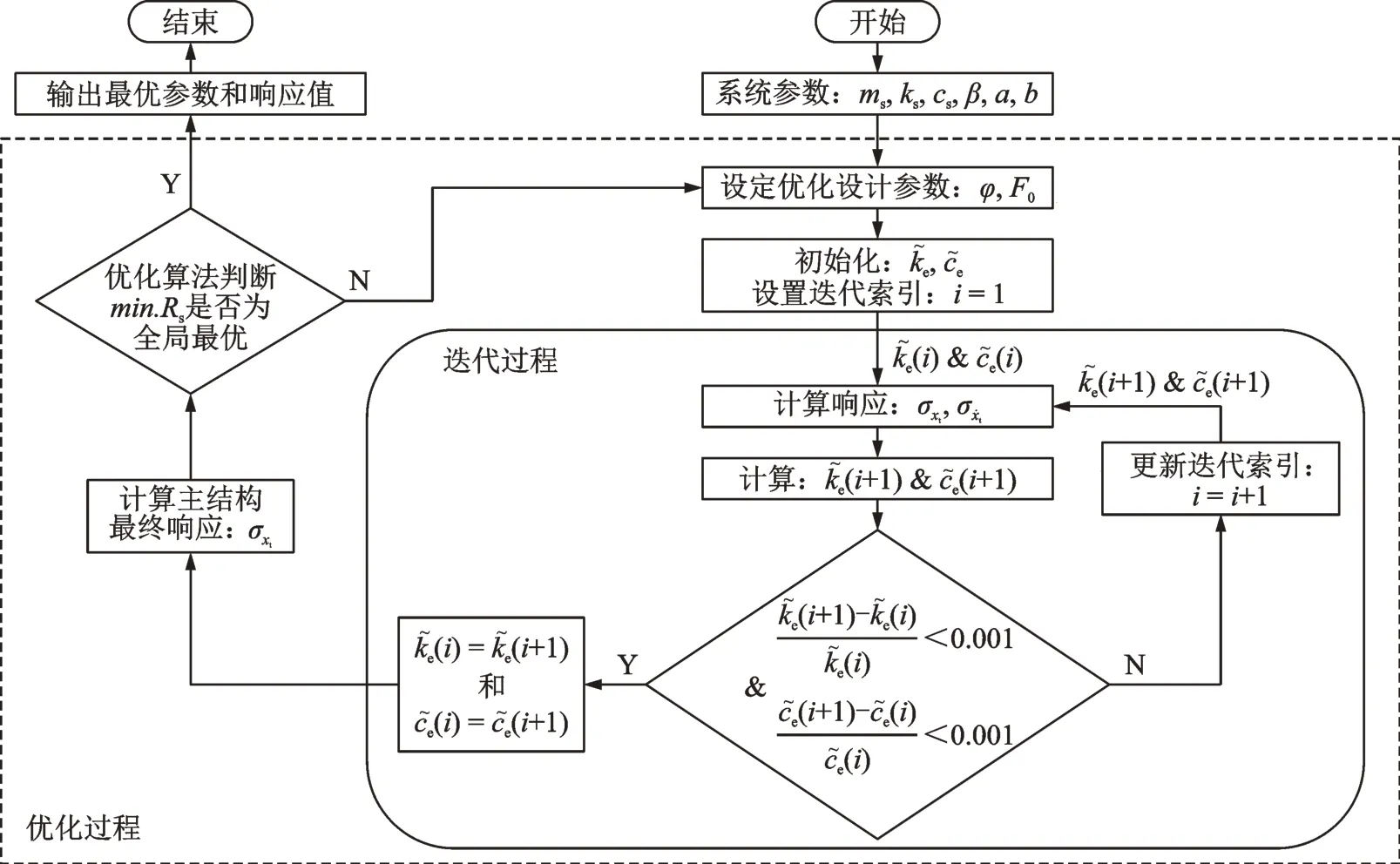
图9 通过迭代优化计算设置结构-SMAI 系统位移均方差的流程图Fig.9 Flowchart of the mean square deviation calculation of displacement of the structure with SMAI system through iteration optimization
3.3 结构位移响应控制性能
图10 为S0=0.05 m2/s3时,设置不同控制系统结构min.Rs随惯容质量比β的变化趋势。如图10 所示,随着β增大,各结构min.Rs都呈下降趋势,TID与SMAI 系统的控制有效性接近但都优于传统的SMA 阻尼器(SMA 参数值与不同β情况下SMAI 系统中的SMA 参数值相同),同时随着β的增大,SMAI 系统的控制有效性逐渐提高,但其控制有效性的提升效率逐渐降低;当β>0.4 时,其控制效率的提升并不显著(即其控制效率的提升将趋于饱和)。

图10 在S0=0.05 m2/s3时不同控制系统结构min.Rs随β 的变化趋势Fig.10 Variation trends of min.Rs of different control systems with β under S0=0.05 m2/s3
图11 为S0=0.05 m2/s3时,SMAI 和TID 系统的最优阻尼值随β的变化趋势。从图11 中可以看出,随着β增大,TID 与SMAI 系统的最优阻尼值都呈递增趋势,但SMAI 系统最优等效阻尼系数小于TID 系统阻尼系数,且在大β下尤为明显。对图10和11 综合分析可知,随着β增大,SMAI 系统可以在阻尼值相对较低的情况下取得与TID 系统相近的控制性能。
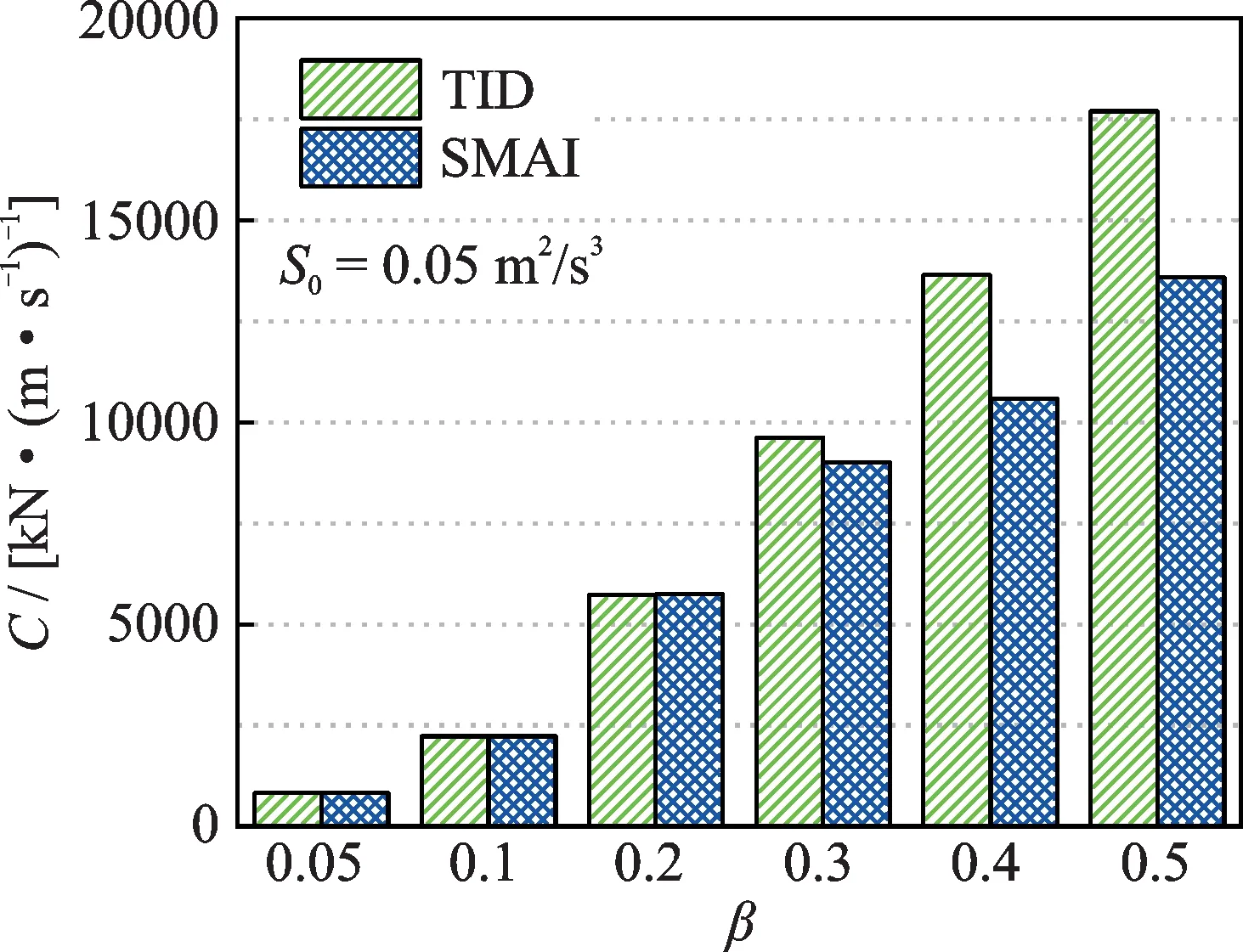
图11 在S0=0.05 m2/s3时TID 和SMAI 系统最优阻尼系数随β 的变化趋势Fig.11 Variation trends of the optimal damping coefficients of the TID and SMAI systems with β under S0=0.05 m2/s3
3.4 结构频率响应行为
图12 为无控和SMA,TMDI,TID 和SMAI 系统控制下结构的位移频响曲线。如图12 所示,随着总惯容质量比增大,不同控制系统下结构的位移频响曲线峰值都呈下降趋势,其中设置TMDI,TID 与SMAI 系统结构频率响应曲线的峰值比较接近,但都小于设置SMA 结构的频率响应峰值。与TMDI系统相比,TID 和SMAI 系统都无需附加质量块。

图12 无控,SMA,TMDI,TID 和SMAI 系统控制下结构位移频响曲线Fig.12 Displacement frequency response curves of structures without control or under SMA,TMDI,TID and SMAI system control
此外在大惯容质量比β情况下分别设置TID 和SMAI 系统结构的位移频响曲线的峰值也比较接近,并且他们的频响曲线峰值都小于设置SMA 结构的位移频率响应峰值。
4 结构-SMAI 系统的时域分析
4.1 白噪声模拟时程
为了在时域内验证SMAI 系统的控制性能,将S0=0.05 m2/s3的白噪声信号由MATLAB 自编程序随机生成,将白噪声信号以激励力的形式作用于结构-SMAI 系统上。本节结构模型参数和前文中取值一致,并利用在频域内得到的优化参数进行时域验证。结构-SMAI 系统动力学方程的矩阵形式为:
式中fSMA表示非线性SMA 的恢复力;P(t)表示激励力。
将单自由度结构-SMAI 系统的动力方程(33)转换成状态空间方程为:
将连续时间状态空间方程(35)转换为离散时间状态空间方程:
式中Ad=eAΔt为4×4 的离散化系统矩阵;上标“Δt”表示时间步长;Bd=A-1(Ad-I)B为4×1 的离散化非线性恢复力向量;Ed=A-1(Ad-I)E为4×1 的离散化荷载向量。
对于非线性SMA 来说,离散化非线性恢复力fSMA[k]定义为:
式中D1=[ 1 -1 0 0 ]为连接SMA 的相对位移输出向量;G1=[ 0 0 1 -1 ]为连接SMA的相对速度输出向量。
相较于 惯容质量比β取值为0.4,β取0.5时的SMAI 系统控制有效性的提升效率并不十分显著,所以综合考虑控制有效性和阻尼需求,这里β的取值为0.4。图13 给出了S0=0.05 m2/s3时无控和分别设置SMA,TID,SMAI 系统结构的位移时程曲线。从图13 中可以看出:在惯容质量比β=0.4 的情况下,SMA,TID 和SMAI 系统都能有效地减小结构位移响应;与SMA 相比,TID 和SMAI 系统的控制效果更佳,不过此时SMAI 系统的等效阻尼系数约为TID 阻尼系数的3/4。
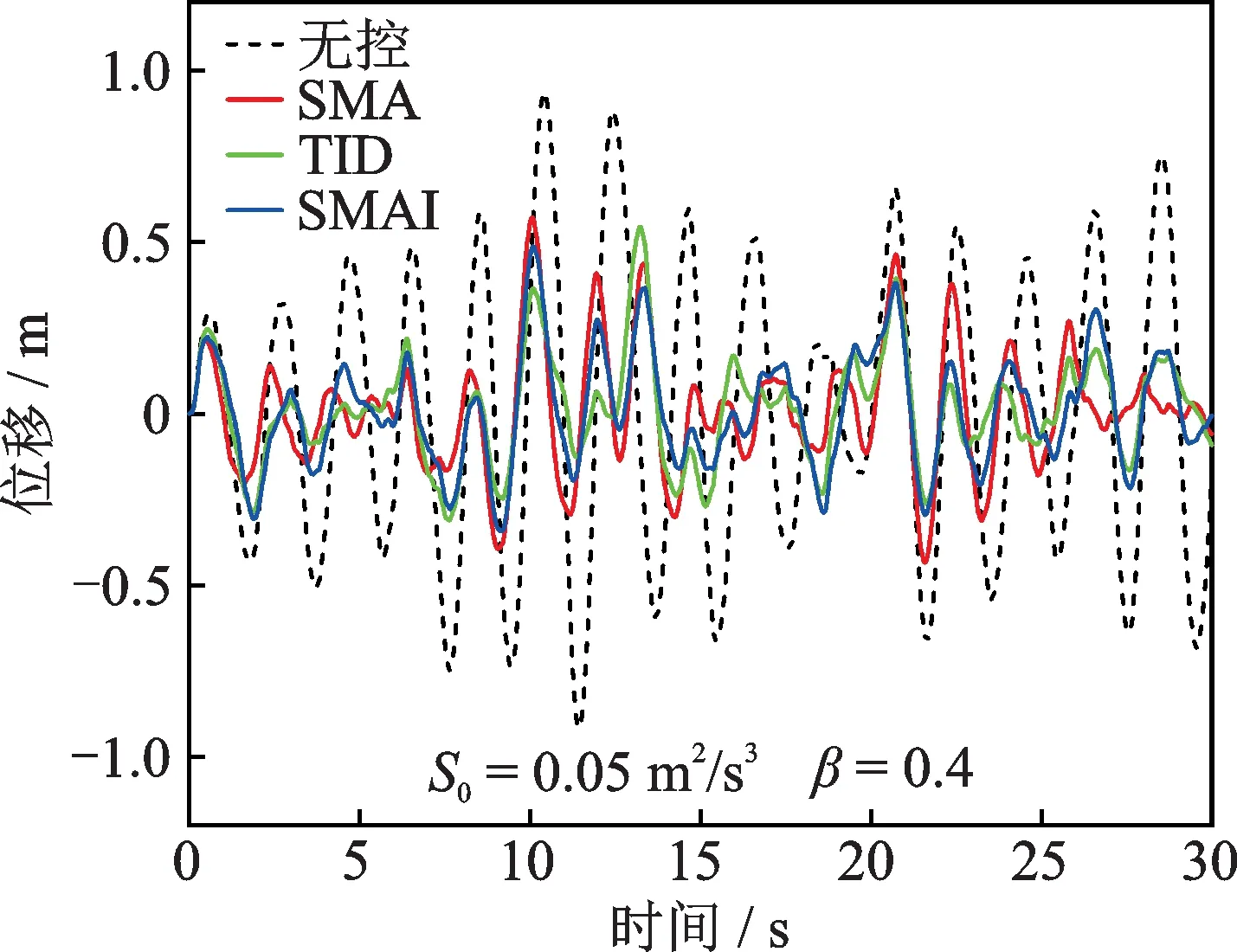
图13 白噪声激励下无控和分别设置SMA,TID,SMAI 系统结构的位移时程曲线Fig.13 Displacement time-history curves of structures without control and respectively with SMA,TID,SMAI systems under white noise excitation
图14 展示了TID 和SMAI 系统中惯容器的位移时程曲线。由图14 可以看出,SMAI 系统中惯容器的位移峰值小于TID 系统中惯容器的位移峰值(这时SMAI 系统中惯容器位移峰值为0.604 m 左右,而TID 系统中惯容器位移峰值为0.662 m左右)。

图14 白噪声激励下TID 和SMAI 系统中惯容器的位移时程曲线Fig.14 Displacement time-history curves of inerters of TID and SMAI systems under white noise excitation
图15 为上述白噪声激励下SMA 的力-位移曲线。从图15 中可以看出,SMAI 系统中SMA 位移明显大于传统SMA 的位移(传统SMA 的最大位移约为0.57 m,而SMAI 系统中SMA 的最大位移约为0.72 m)。在惯容质量比β=0.4 的情况下,SMAI 系统中SMA 滞回位移的最大值与滞回曲线面积都大于传统SMA 的相应值,且TID 系统中惯容器的最大出力为46 kN 左右,SMAI 系统中惯容器的最大出力为23 kN 左右,意味着SMAI 系统中惯容器对结构的损害更小。

图15 白噪声激励下SMA 的力-位移曲线Fig.15 Force-displacement curves of SMA under white noise excitation
综上所述,与TID 系统相比,SMAI 系统中SMA 与惯容器协同作用可以有效降低惯容器的位移峰值;SMAI 系统中惯容器的最大出力远低于TID 系统中惯容器的出力,即SMAI 系统中惯容器对结构的损害更小;此外惯容器可以进一步发挥SMA 的潜力,通过放大SMA 位移提高其能量耗散能力。
4.2 脉动风模拟时程
选择一单层结构,并根据上述的优化设计方法,给出SMAI 系统的具体设计参数如下:β=0.4,φ=0.001,F0=0.2289。并通过一组模拟的脉动风荷载时程进一步验证SMAI 系统的控制性能。结构参数为:ωs=0.5 Hz,ζs=1%,ms=250 t,迎风面积为(50×16)m2。
图16 展示了一组模拟的脉动风荷载时程。图17 给出了其在脉动风荷载激励下无控和分别设置SMA,TID,SMAI 系统结构的位移时程曲线。由图17 可见,SMA,TID 和SMAI 系统都能有效地减小结构位移响应,其中,无控状态下结构位移峰值为0.695 m 左右,SMA 系统控制下结构位移峰值为0.239 m 左右,TID 系统控制下结构位移峰值为0.171 m 左右,SMAI 系统控制下结构位移峰值为0.159 m 左右。特别值得注意的是,此时SMAI 系统中最优等效阻尼系数仅为TID 系统最优阻尼系数的5/7 左右。
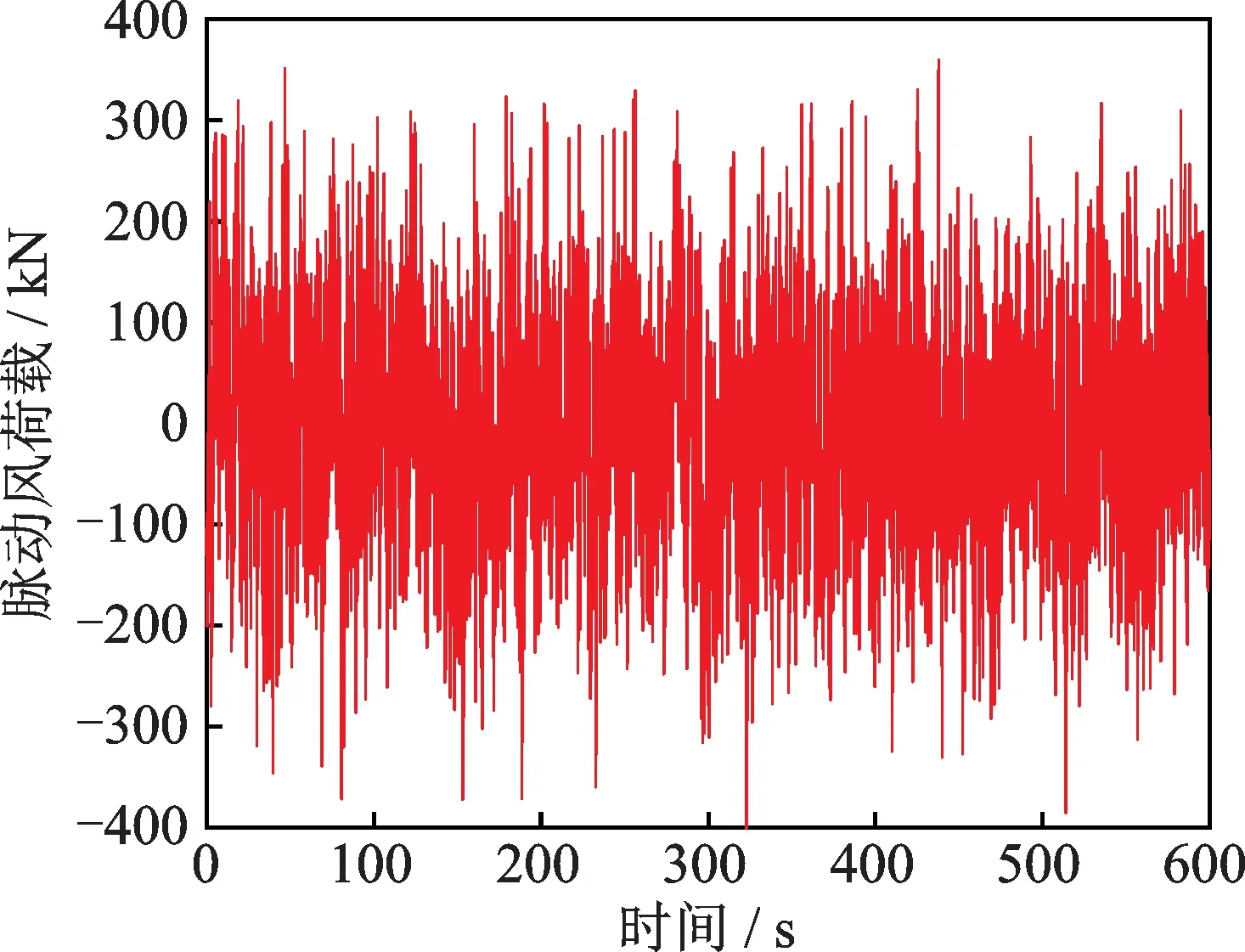
图16 模拟脉动风荷载时程Fig.16 Time-history of simulated fluctuating wind load

图17 脉动风荷载激励下无控和分别设置SMA,TID,SMAI 系统结构的位移时程曲线Fig.17 Displacement time-history curves of structures without control and respectively with SMA,TID,SMAI systems under fluctuating wind load
文章研究的单自由度建筑结构-SMAI 系统,是为将SMAI 装置应用在多自由度建筑结构中打下理论基础,在之后的研究中会在多自由度建筑结构中连接SMAI 并添加风谱进行验证计算。根据实际工程应用,应将SMA 的一端设置在横向位移最大的楼层,一般是在最顶层与楼板相连,另一端则与惯容器相连。惯容器的另一端可通过设计足够大的楼板开口连接到建筑结构的下一层或几层的楼板处(单自由度建筑结构-SMAI 系统中,惯容器一端则直接与地面相连)。形状记忆合金阻尼器、惯容器在建筑结构中协同工作的示意图如图18 所示。

图18 形状记忆合金阻尼器、惯容器在多自由度建筑结构中协同工作的示意图Fig.18 Schematic diagram of cooperative operation of shape memory alloy damper and inerter in multi-degree-offreedom building structure
图18 中,n为基本建筑结构的自由度;wi(i=1,…,n)表示每一层上的风荷载激励;xi(i=1,…,n)表示基本建筑结构的第i层相对于地面的位移;mi(i=1,…,n)表示基本建筑结构的第i层的质量;下标“n-L”表示惯容器所连接的楼层。
5 结论
本文提出了一种SMAI 协同系统,首先在频域内揭示了SMAI 系统的减振行为,然后在时域内进一步验证了SMAI 系统的控制性能。得出的主要结论如下:
(1)提出了以结构均方位移响应为控制目标的SMAI 系统优化设计方法,并通过算例验证了优化设计方法的有效性。
(2)与传统的SMA 阻尼器相比,SMAI 系统中惯容器可以显著提高SMA 的滞回位移,因而提高了其能量耗散能力。
(3)与TID 系统相比,在总惯容质量比大于0.3时,SMAI 系统的最优等效阻尼系数值明显低于TID 系统的最优阻尼系数值,并能提供相近的控制有效性;同时,SMAI 系统中的惯容器出力明显低于TID 系统中的惯容器出力,这意味着SMAI 系统中惯容器对结构损伤更小。这些优势使得SMAI 系统在实际工程中将具有极佳的应用前景。
本文在频域和时域内对单自由度结构-SMAI系统的控制性能进行了系统研究。接下来的研究工作将是使用平稳和非平稳脉动风速谱对多自由度结构-SMAI 系统的风致振动控制性能及设计方法进行研究。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
阅读(快乐英语中年级)(2022年11期)2022-05-30
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
工业安全与环保(2020年10期)2020-11-05
读者·校园版(2019年24期)2019-12-10
四川建筑(2018年4期)2018-09-14
数学物理学报(2016年6期)2016-04-16
小朋友·聪明学堂(2015年8期)2015-11-30