基于固定时间非奇异终端滑模的汽车主动前轮转向系统控制
2024-01-11 12:56陈一伦梅珂琪戴肖肖张汉章蒋连杰吴元柱丁世宏
扬州大学学报(自然科学版) 2023年6期
陈一伦, 梅珂琪*, 戴肖肖, 张汉章, 蒋连杰, 吴元柱, 丁世宏*
(1. 江苏大学电气信息工程学院, 江苏 镇江 212000; 2. 浙江加力仓储设备股份有限公司, 浙江 湖州 313000)
随着车辆控制技术的快速发展, 车辆的横向稳定性备受关注.主动前轮转向(active front steering, AFS)技术作为主动安全控制方法之一, 可以实施转向干预, 并使车辆响应尽可能达到理想的响应特性, 从而提高车辆的操纵性和稳定性[1].近年来, 比例积分微分(proportional integral derivative, PID)控制[2]已被广泛用于AFS, 但车辆动态系统是一个复杂的时变非线性系统, PID中建模误差、参数摄动和外部干扰等强不确定性[3]都会影响闭环控制系统的性能.滑模控制(sliding mode control, SMC)因具有良好的鲁棒性, 且无须对系统进行精确的数学描述,故在汽车主动安全控制中得到广泛应用.为了实现有限时间稳定性, 二阶滑模控制[4-5]、终端滑模控制[6-7]、积分滑模控制[8-9]和离散滑模控制[10-11]等滑模控制方法被相继提出, 其中Zhang等[6]提出的一种新的自适应非奇异终端滑模(nonsingular terminal sliding mode, NTSM)控制方法, 改善了AFS系统中SMC收敛性能差的问题.上述方法实现了各阶段误差的快速收敛,并降低了控制系统的抖振.然而, 由于收敛时间取决于系统的初始值,只要初始值趋于无穷大, 收敛时间就会无限增加; 因此, 本文拟提出一种基于固定时间非奇异终端滑模的主动前轮转向控制器, 以期使得收敛时间与系统的初始值无关, 而是取决于滑模面及控制器的参数设计.
1 车辆动力学模型和问题描述
通过建立线性二自由度(two degree-of-freedom, 2DOF)车辆模型得到方向盘转角与车辆的横摆角速度和质心侧偏角之间的关系.现假设:
1) 忽略空气阻力、转向系统和悬架系统在车辆运动中的影响;
2) 前后轴上的左右轮胎侧偏角相等;
3) 只考虑车辆的侧向及横摆运动.
忽略车速变化和前轮转角较小等因素, 根据牛顿第二定律可得如下二自由度车辆动力学模型:
(1)
(2)
其中m为车辆质量;vx为车辆纵向行驶速度;β为车辆行驶质心的侧偏角;r为车辆横摆角速度;Cf,Cr分别为车辆前、后轮侧偏刚度;a,b分别为车辆前、后轮与质心间的距离;δf为前轮转角;Iz为车辆绕z轴的转动惯量;d(t)为集总干扰变量.图1为简化的车辆二自由度模型, 其中x,y轴分别为车辆纵向和侧向运动方向;v为车辆行驶速度;vy为车辆侧向行驶速度;Fxf,Fxr分别为车辆前、后轮的纵向力;Fyf,Fyr分别为车辆前、后轮的侧向力.
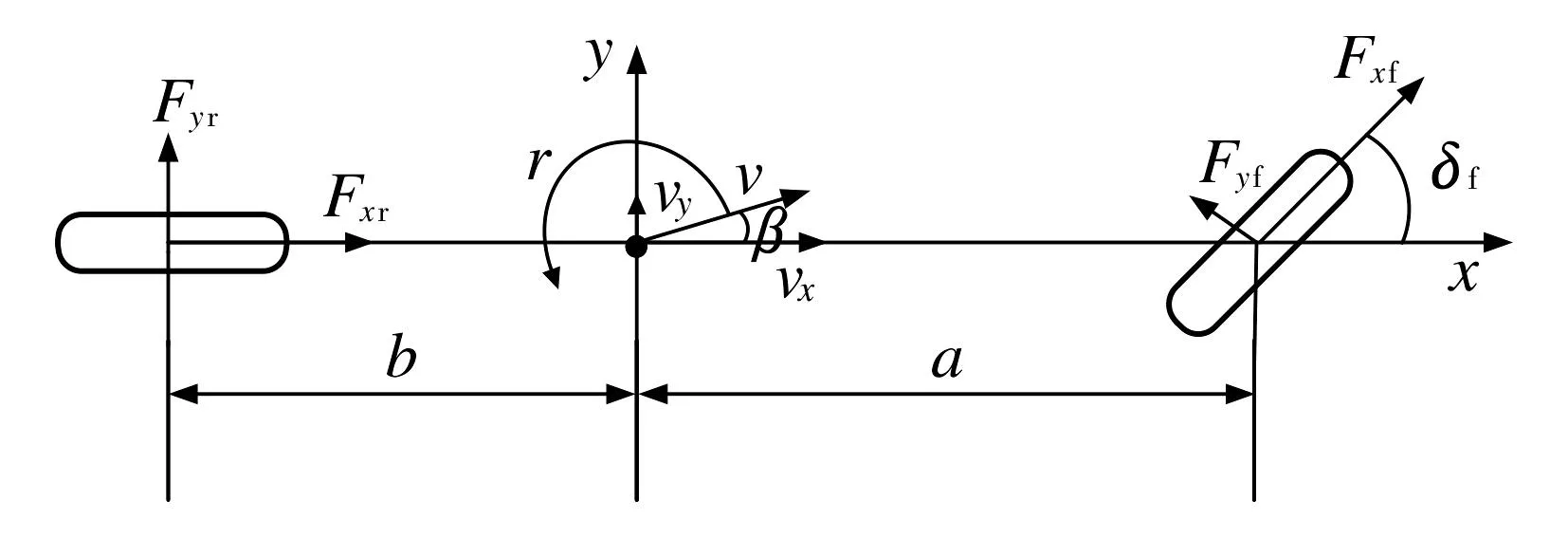
图1 车辆二自由度模型Fig.1 2DOF vehicle model
车辆稳定性控制中最重要的2个变量是横摆角速度和侧偏角, 前者可反映车辆绕其质心的旋转程度, 后者反映车辆偏离行驶方向的程度.当实际横摆角速度接近理想值时, 车辆具有良好的操纵稳定性.基于二自由度车辆模型(1)(2), 考虑轮胎的非线性特性和复杂的道路条件, 计算理想横摆角速度[12]
(3)

2 控制器设计
考虑二阶带匹配扰动的非线性系统
(4)

假设1假设外部扰动d1有界, 对于x∈R2以及t≥0, 则存在正常数D, 使得|d1(t)|≤D.
引理1[13]若一类非线性系统满足以下形式:
(5)

(6)
系统(5)中因采用了变幂指数项|y|α1sgn(y)和|y|α2sgn(y), 故当|y|>1时, |y|α1sgn(y)转化为|y|m1sgn(y), 此时a1|y|α1sgn(y)占主导作用; 当|y|≤1时, |y|α2sgn(y)转化为|y|m2sgn(y), 此时a2|y|α2sgn(y)在收敛过程中起主导作用.变幂次项的引入使得非线性系统可达快速收敛.基于此, 设计如下固定时间非奇异终端滑模面:
s=x2+a1|x1|α1sgn(x1)+b1φ(x1),
(7)
(8)

为满足快速收敛的要求, 选取滑模趋近律
(9)

设计控制器
(10)
在上述滑模面、趋近律和控制器的设计中均不包含负指数项, 故可避免奇异现象, 并能取得较好的收敛效果.对于非线性系统(4), 采用终端滑模面(7)和控制器(10), 系统可在固定时间内达到稳定状态.
3 系统稳定性分析
选取Lyapunov函数
(11)
对式(11)求导可得
b2|s|β2sgn(s)-k1sgn(s))≤s((D-k)|s|-a2|s|β1-b2|s|β2)≤
-a2|s|β1+1-b2|s|β2+1=-a2(2V)(β1+1)/2-b2(2V)(β2+1)/2≤0.

构造Lyapunov函数
(12)
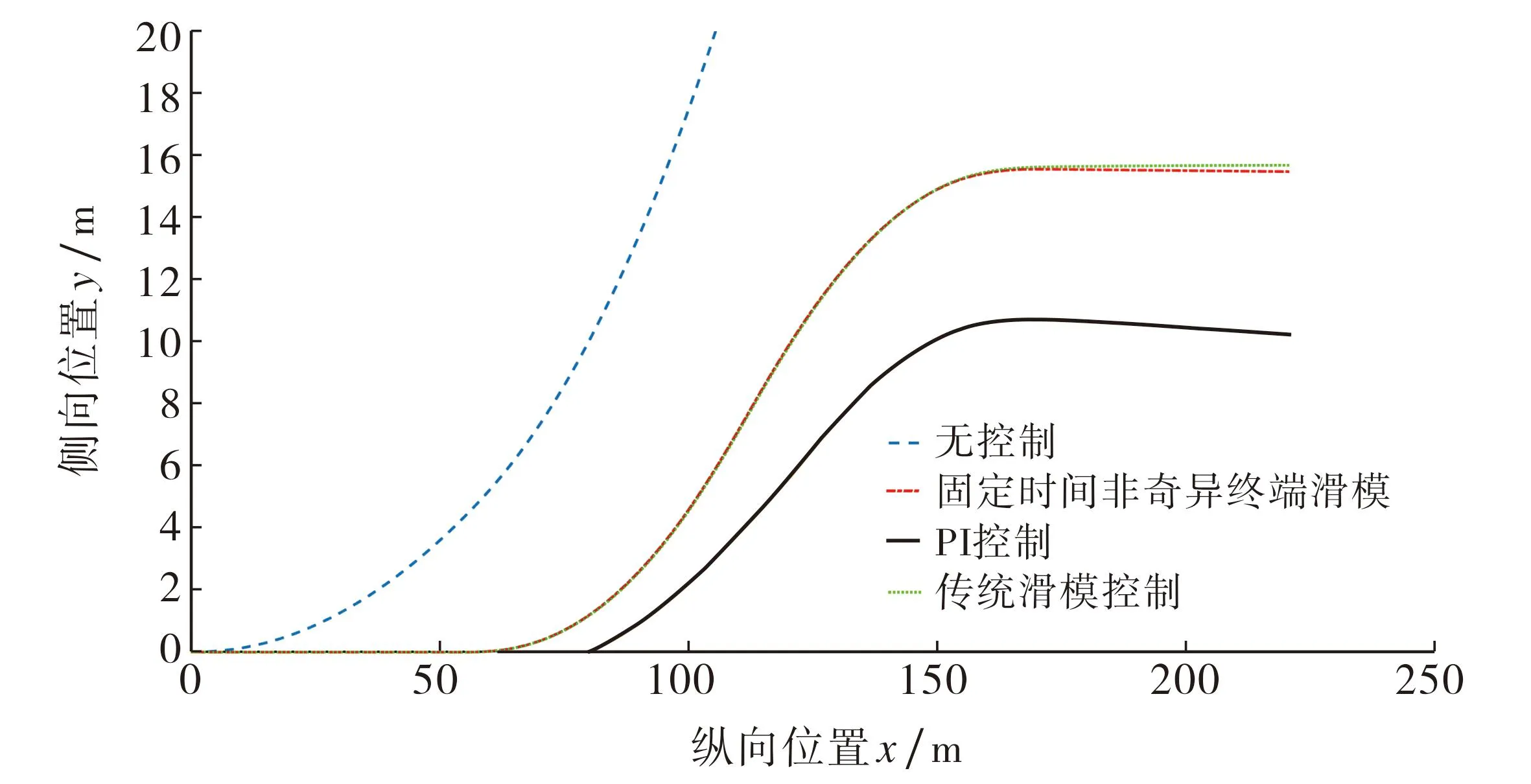
综上所述, 系统到达滑模面所需时间为t1, 并且系统到达滑模面后会在固定时间t2内到达状态原点.由引理1知系统将在固定时间t内稳定,t=tmax 在Simulink中建立AFS系统的仿真模型, 并通过CarSim软件设置接口参数, 实现CarSim和MATLAB联合仿真.设置车辆模型的基本参数:m=1 429 kg,a=1.05 m,b=1.569 m,Iz=1 765 kg·m2,Cf=79 240 N·rad-1,Cr=79 240 N·rad-1,v=80 km·h-1,μ=0.3. (13) (14) 其中c为正常数.基于滑模面(14), 设计传统滑模控制器 (15) 其中参数c=0.8,ρ=6. 设定车辆的行驶速度为80 km·h-1, 方向盘最大输入转角为1.047 rad, 方向盘转角和侧向风干扰的设定如图2所示.利用本文控制器、PI控制器和传统滑模控制器在单移线工况下进行对比仿真分析,结果如图3~4所示. 图2 方向盘输入转角(a)和侧向风干扰(b)Fig.2 The steering wheel angle (a) and the side wind disturbance (b) 图3 不同控制器下的车辆轨迹Fig.3 Vehicle trajectories under different controllers 图4 横摆角速度响应曲线Fig.4 The response curves of yaw velocity 由图3~4可知: 在本文所设计的控制器(10)与传统滑模控制器(15)作用下, 车辆均可在安全路径范围内行驶, 但本文控制器(10)的跟踪性能更好, 且解决系统抖振问题的能力较PI控制器和传统滑模控制器更优. 本文提出了一种汽车主动前轮转向系统的固定时间非奇异终端滑模控制方案.该控制方案将固定时间滑模面与幂次趋近率相结合, 可实现在固定时间内使系统达到稳定,并降低系统的抖振.通过与PI控制和传统滑模控制器的比较, 表明所设计的固定时间非奇异终端滑模控制器在侧风干扰下具有很强的鲁棒性, 且可有效保持车辆的稳定性.4 仿真分析




5 结论
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
装备制造技术(2021年4期)2021-08-05
解放军健康(2017年5期)2017-08-01
中学生数理化·高一版(2017年3期)2017-07-08
知识经济·中国直销(2016年2期)2016-11-07
火控雷达技术(2016年1期)2016-02-06
红蜻蜓·低年级(2015年11期)2016-02-02
中国铁道科学(2015年4期)2015-06-21
交通建设与管理(2015年13期)2015-03-20
中国自行车·骑行风尚(2014年4期)2014-10-10