
执行器攻击下自主无人车辆模糊滑模安全控制
2024-01-13 13:04孙洪涛赵庆堂王志文
汽车安全与节能学报 2023年6期
孙洪涛,王 晨,赵庆堂,王志文
(1.曲阜师范大学 工学院,日照 276826,中国;2.潍柴雷沃智慧农业科技股份有限公司,潍坊 261200,中国;3.兰州理工大学 电气工程与信息工程学院,兰州 730050,中国)
伴随着5G、人工智能等新型信息技术的高速发展,汽车已经从简单的、机械的交通工具转变为与新一代电子信息技术相结合的重要载体。自主无人车辆(autonomous unmanned vehicle,AUV)通过装载先进传感器、控制器、执行器等装置,并融入先进通讯网络技术,为用户提供了舒适的驾乘体验,AUV 将成为未来交通系统的重要组成部分[1]。
随着车联网技术的普及,一些网络安全问题也逐渐显现。例如,SUN Hongtao 等[2]研究了一种无人地面车辆处于传感器攻击下的情况,当发生传感器攻击时车辆转向角、横向加速度以及横摆角速度发生了明显的抖动现象。YANG Fan[3]考虑了一种虚假数据注入攻击下的车队通信问题,处于虚假数据注入攻击下的车队系统通信资源利用率明显降低,因此AUV 的发展面临网络安全的严重挑战。由于AUV 接入网络通讯环境,从而更加容易遭受到网络黑客发起的恶意攻击,所以解决AUV 中的网络攻击问题是保证车辆正常行驶的关键[4]。
在近几十年中,拒绝服务(denial of service,DoS)攻击[5]和虚假数据注入(false data injection,FDI)攻击[6]是2 种主要发生在AUV 中的网络攻击类型。当装载电子控制单元(electronic control unit,ECU)的AUV 通过控制器局域网总线技术(controller area network-bus,CAN-BUS)传输实时信息时,DoS 攻击会在瞬间传输大量无用的信息去阻止ECU 产生车辆下一步的控制指令并且会浪费有限的通信资源。针对DoS 攻击,已提出一些处理方法,事件触发控制方法[7]、模型预测控制方法[8]。然而,DoS 攻击在通讯网络中只会导致数据包丢失,所以在网络控制系统中相对容易被检测到。与DoS 攻击不同的是属于欺骗攻击的FDI 攻击,因其难以检测性受到人们的广泛关注[9]。FDI 攻击会对系统的稳定性造成难以预料的危害,一旦行驶中的AUV 受到FDI 攻击的影响[10],后果将不堪设想。
路径跟踪是智能驾驶中的一个基本控制问题,对AUV 中的路径跟踪控制在过去就得到了广泛的研究[11-12]。李耀华等[13]提出了一种最优预瞄控制策略保证了车辆路径跟踪过程中的稳定性。LUAN Zhongkai 等[14]为保证随机网络延迟环境下无人驾驶汽车系统稳定性和跟踪精度设计了一种自适应模型预测控制算法。但以上策略在设计中都具有一定的保守性,少有考虑AUV 处于复杂网络通讯环境下,进行路径跟踪时可能会受到网络攻击或者外部干扰的情况。特别是当AUV 在行驶过程中,如果此时网络黑客成功通过无线通讯网络施加恶意攻击信号,如执行器攻击信号[15],极有可能导致车辆发生意外事故,造成严重的经济损失以及危害到人身安全。为了保证路径跟踪控制性能的同时有效的增加车辆行驶过程中鲁棒性,降低外部干扰以及网络攻击带来的安全影响,所以设计一种安全鲁棒协同控制策略对于AUV的路径跟踪控制系统具有十分重要的意义。
众所周知,滑模变结构控制策略具有结构简单、响应快速且对外界干扰和参数摄动具有强鲁棒性的特点,因此在AUV 中得到了广泛的研究[16-18]。但抖振现象的发生一直都是滑模变结构控制策略发展缓慢的主要原因之一。由于模糊逻辑能够比较容易地将人的控制经验通过模糊规则融入控制器中,所以通过设计模糊规则,可实现滑模控制中抖振现象的消除。
因此,本文将执行器攻击信号看作外部干扰,针对AUV 路径跟踪过程中发生执行器攻击导致跟踪性能下降等问题,提出了滑模变结构控制和模糊控制规则相结合的控制方案,通过MATLAB/Simulink 和CarSim 联合仿真实验验证所设计的控制策略能够使得执行器攻击下的AUV 保持良好的路径跟踪控制性能,实现安全鲁棒稳定运行。
1 自主无人车辆数学建模
1.1 车辆动力学建模
假设车辆沿x轴的前进速度vx保持不变,车辆只沿y轴做侧向运动与绕z轴的横摆运动,忽略悬架系统、轮胎载荷变化等影响。因此,可将AUV 等效为一个二自由度车辆动力学模型,如图1 所示。
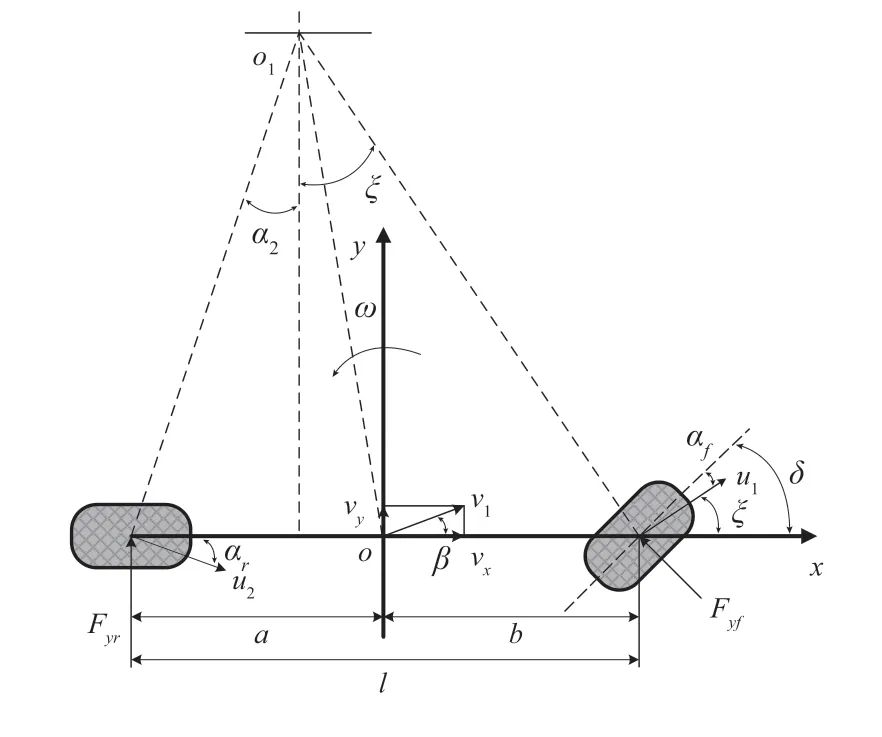
图1 二自由度车辆动力学模型
由图1 可知,车辆二自由度平面运动模型[19]可以表示为
其中:m为整车质量;vx为纵向车速;Iz为汽车绕z轴的转动惯量;Cf为前轮等效侧偏刚度;Cr为后轮等效侧偏刚度;α为质心到前轴距离;b为质心到后轴距离;β为质心侧偏角;ω为横摆角速度;δ为前轮转角。
定义系统的状态向量x(t) = [βω]T,控制向量u(t) =δ,可得AUV 的路径跟踪控制模型的状态空间表达式为
1.2 执行器攻击下路径跟踪控制模型
考虑传感器、控制器和执行器之间的通信网络连接,以及车辆路径跟踪控制过程,绘制出的复杂网络环境下执行器攻击的AUV 路径跟踪控制架构,如图2所示。从图中可以看出,系统的控制动作是由执行器发起的,其性能可能受到恶意攻击或者扰动的影响。

图2 执行器攻击下AUV 路径跟踪控制架构
假设执行器攻击信号为σa[t,x(t)],考虑执行器攻击信号下的实际控制输入为
如果σa[t,x(t)]不等于零时,控制变量,t> 0 表示执行器攻击信号已成功注入控制信号中。当σa[t,x(t)]恒等于零时,这时,t> 0,表示此时无执行器攻击行为。
假设1:假设执行器攻击信号σa[t,x(t)]已经劫持从电子控制单元传输到执行器的控制信号,并将车载控制模块的控制指令成功篡改,且将被破坏的控制指令传输到车辆执行机构中。
假设2:假设本研究中考虑的执行器攻击信号满足
σa[t,x(t)]为已知的正函数。结合系统动力学模型,见式(5),执行器攻击下AUV 路径跟踪控制系统的状态空间表达式为
其中,k为控制器增益。
此时,如果执行器攻击信号已成功劫持控制信号,并将被破坏后的控制指令传输到车辆执行机构中,极大可能导致路径跟踪过程中的AUV 产生危险的安全事故。所以,接下来根据模糊滑模控制策略自身固有的鲁棒性,设计一种模糊滑模安全控制策略来缓解执行器攻击带给AUV 路径跟踪控制的不利影响并解决抖振现象,在保证跟踪性能的同时提高AUV 行驶过程中的安全性。
根据系统需要,本研究被控系统可表示为
其中,ζ(ω) =A21β+A22ω。
2 路径跟踪滑模控制器设计
2.1 滑模控制器设计
所设滑模控制方案总共分为2 部分,首先是给出滑模面的设计,确保AUV 路径跟踪控制系统到达滑动模态后,能够实现渐近稳定且保持良好的跟踪性能;其次是提出AUV 路径跟踪滑模控制器设计方法,保证在一段时间内,系统状态轨迹到达滑模面,并在接下来的过程中一直保持滑动模态。
本节对车辆横摆角进行控制,取误差为
其中:e为实际横摆角速度与理想横摆角速度的差值,ω为实际横摆角速度,ωd为理想横摆角速度。
对式(6)所示系统(本研究被控系统式)设计如下滑模面:
其中:λ为滑模面系数,λ> 0。
对(8)式进行求导可得
当滑模运动发生在滑模面时,此刻
所设滑模控制器
2.2 稳定性证明
定理1:对于给定的正实数λ、η和滑模控制器增益κ(t),如果滑模控制器设计成式(11)所示系统,则可保证本研究被控系统(式(6)所示)全局渐近稳定。
证明:定理1 的证明将会使用到Lyapunov 稳定性理论,为了确保滑模面存在的必要条件,选取Lyapunov 函数
对Lyapunov 方程V求导
将所设控制器模型式(11)带入得到
由于η> 0 是一个正实数,V> 0,V≤0,因此,所设计的AUV 路径跟踪滑模控制律满足稳定性要求。其中,к(t)为切换项增益,目的为消除执行器攻击带来的不利影响,但较大的执行器攻击信号需更大的切换项增益补偿,以至于产生抖振现象从而导致路径跟踪无法满足行驶要求。
3 模糊控制规则设计
在滑模控制器模型算式(11)中,切换项增益к(t)是造成滑模控制设计中抖振存在的主要原因。к(t)用于补偿执行器攻击信号σa[t,x(t)],以保证滑模存在性的满足条件。由于本研究执行器攻击信号带有随机性,所以,σa[t,x(t)]的数值大小难以确定并且是随时间变化的,如想要降低滑模控制中抖振的发生,则此时AUV 电子控制单元中所设计的滑模控制器增益应也是时变的且可随执行器攻击信号数值变化而变化。
模糊控制由于不需要精确的数学模型且鲁棒性能良好,相比于其他控制方法,它能够很好地利用专家经验设计模糊规则进而使系统达到设计要求,所以本节采用模糊规则实时调节切换项增益已达到路径跟踪要求。
3.1 模糊控制算法
AUV 路径跟踪控制中滑模到达条件为s(t)ṡ(t) < 0,当路径跟踪系统到达滑模面后,需要保持在滑模面上。由式(11)可知,к(t)为保证系统运动得以到达滑模面的增益,其值必须足以消除执行器攻击带来的影响,才能保证滑模存在条件s(t)ṡ(t) < 0 成立。
AUV 路径跟踪模糊规则:
由上述模糊规则可设计s(t)ṡ(t) 和к(t)之间关系的模糊系统,在该系统中s(t)ṡ(t)为模糊滑模控制器的输入,其模糊集论域为[-2, 2];к(t)为模糊滑模控制器输出,其模糊集论域为[-2, 2]。系统输入/输出的模糊集分别定义为:
其中:NB、NM、NS、ZO、PS、PM、PB 分别表示 负大、负中、负小、零、正小、正中、正大。
因车辆失稳时需要系统快速做出决策,三角函数是模糊化和去模糊化最快的隶属度函数,故为了提高控制系统的运算速度和反应能力而选择三角形隶属度函数,其输入/输出的隶属度函数如图3 所示。
为了让к(t)尽可能合理的变化,隶属度函数的阈值主要界定依据为s(t)ṡ(t) 值的大小。当s(t)ṡ(t) 为NB时,为了让系统更加快速调节至稳定状态,应更快速增大к(t),可使к(t)的模糊值为NB。当s(t)ṡ(t) 为NM 时,则需快速调整к(t)模糊值为NM 。当s(t)ṡ(t) 为NS 时,通过实验发现,当к(t)模糊值为NS,抖振效果抑制明显 。当s(t)ṡ(t) 为PB 时,为了让系统更加快速调节至稳定状态,应更快速增大к(t),可使к(t)的模糊值为PB。当s(t)ṡ(t) 为PM 时,应快速调整к(t)模糊值为PM。当s(t)ṡ(t) 为PS 时,通过实验发现,模糊值为PS,抖振效果抑制明显 。当s(t)ṡ(t) 为ZO 时,模糊值应为ZO。因此,本系统模糊规则设计如表1 所示。

表1 模糊规则设计表
本系统具体模糊阈值界定规则表设计如表2 所示。
采用积分法对к(t)的上界进行估计:
其中,J为比例系数根据专家经验确定。
经过模糊规则训练后的滑模控制器:
3.2 方向盘转角设计
当系统稳定时ṡ(t) = 0,可得:
基于单点预瞄驾驶员理论[20]方法研究,可得理想横摆角速度ωd为
其中:Δf表示预瞄偏差,tp表示预瞄时间。
令= 0,结合模糊滑模安全控制律设计可得关于前轮转角表达式为
可得方向盘转角表达式为
其中:isw为方向盘转角传动比。
为提高AUV 路径跟踪稳定性与安全性,采用饱和函数替代符号函数,饱和函数形式为
其中, Δ 为饱和函数的边界层 。
4 仿真验证
本节通过MATLAB/Simulink 和CarSim 联合仿真实验平台验证所提模糊滑模安全控制策略在路径跟踪时受到执行器攻击情况下的有效性,MATLAB/Simulink 和CarSim 联合仿真框图如图4 所示。
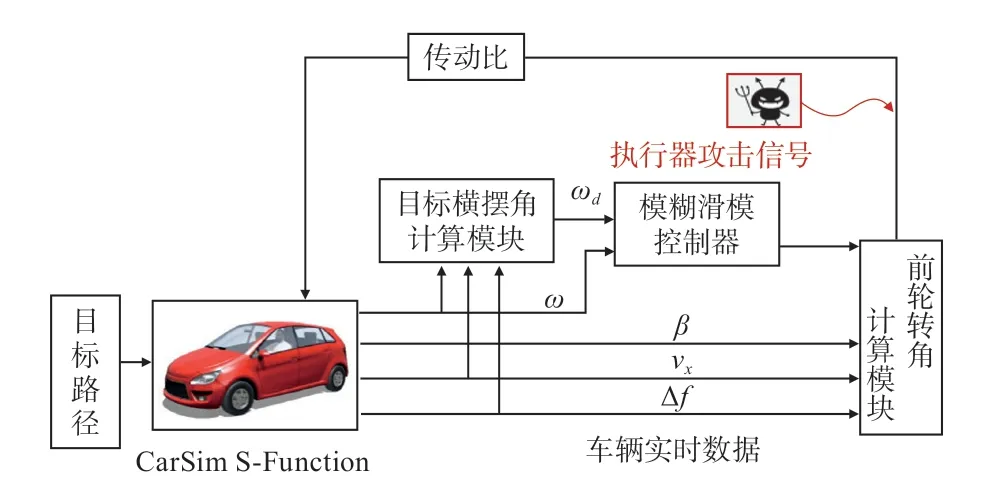
图4 MATLAB/Simulink 和CarSim 联合仿真框图
CarSim 所选车辆型号为C-class,Hatchback,具体车辆工况参数如表3 所示:

表3 车辆仿真参数
4.1 单移线工况
以表1 中车辆工况为主要仿真参数,单移线工况下AUV 路径跟踪初始化车速设为72 km / h,在CarSim 车辆仿真软件中进行单移线实验道路设置,设定路面附着系数为0.8,预瞄时间为0.6 s,执行器攻击信号设计为σa[t,x(t)]= 1 000 tanh(β2)。
图5 为执行器攻击下AUV 单移线路径跟踪仿真结果对比。其中,Sy为横向位移,Sx为纵向位移。由图5a和5b 可知,无执行器攻击情况下实际行驶轨迹与目标轨迹拟合程度高,横向偏差ΔSy未超过(±0.5) m。但从图中可看出存在执行器攻击情况位移可达到3.8 m 左右。横向偏差幅值变化更为明显,在50~100 m 过弯处,最大横向偏差较无执行器攻击情况下增大0.26 m。由图5c 和图5d 可知,当存在执行器攻击时车辆转弯处方向盘转角δsw和质心侧偏角β数值都有增大并且出现突变现象,方向盘转角在受到攻击时数值最大增加80.7%,质心侧偏角β最大增加253.5%。由此说明,当存在执行器攻击时,AUV 路径跟踪精度降低,方向盘转角以及质心侧偏角无法满足实验要求。

图5 执行器攻击下AUV 单移线路径跟踪仿真结果
为解决执行器攻击对于路径跟踪过程的安全影响,通过设计一种滑模安全控制策略以缓解执行器攻击带给AUV 路径跟踪控制的影响。根据图5a—图5b 可知,当发生执行器攻击时,路径跟踪效果良好、满足实验要求。从图5c—图5d 可知,在AUV 发生执行器攻击情况下方向盘转角和质心侧偏角数值增大以及突变现象得以缓解,基本可恢复至无执行器攻击时状态,说明增加滑模控制后系统鲁棒性增强,即使发生执行器攻击现象,系统依然保持原始状态,并且路径跟踪效果得到改善;但是还可以看出,当滑模控制器作用时,方向盘转角以及质心侧偏角都发生了严重的抖振现象,由于抖振现象的存在导致AUV 路径跟踪控制效果大幅度降低,对AUV 路径跟踪带来了不利的影响。
由图6a—图6b 可知,在模糊规则作用下,AUV路径跟踪控制过程中的方向盘转角和质心侧偏角抖振现象明显消除,并且与无执行器攻击情况时方向盘转角和质心侧偏角波形一致。通过图6c—图6d 可知,在模糊规则控制作用下,不仅抖振现象得以消除,横向偏差较滑模控制时数值有所减小,路径跟踪效果符合实验要求。由实验结果可得,对于单移线工况下AUV 路径跟踪过程中发生执行器攻击的情况,所设计模糊滑模安全控制策略具有很好的鲁棒性,能够缓解执行器攻击对于AUV 路径跟踪控制带来的不利影响,并且可以解决滑模控制中存在的抖振现象,很好的实现路径跟踪控制效果。
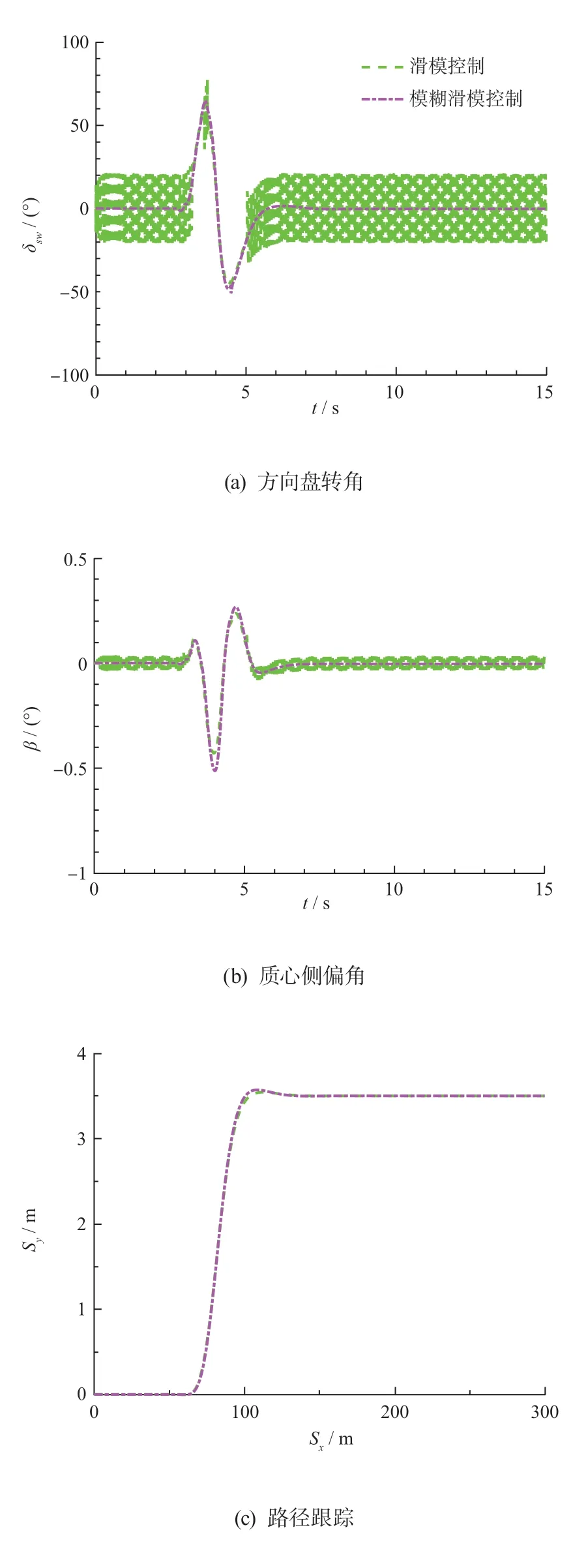
图6 单移线工况下模糊滑模控制与滑模控制效果
4.2 双移线工况
较单移线工况路径跟踪仿真结果分析,进行车辆路径跟踪双移线道路设置,车速、路面附着系数及预瞄时间与单移线情况相同,执行器攻击信号值为σa[t,x(t)] = 15 000 tanh(β2)。
由图7a—7b 可知,在双移线工况时,可明显看出存在执行器攻击情况下车辆路径跟踪效果变差,横向位移最大处可达3.85 m,横向偏差幅值变化明显,在90~120 m 过弯处,最大横向偏差较无执行器攻击情况下增大0.292 8 m;可见在滑模安全控制策略作用下,执行器攻击造成的不利影响得以改善,系统基本可以恢复到原始状态,路径跟踪效果变好。

图7 执行器攻击下AUV 双移线路径跟踪仿真结果对比
由图7c—7d 可知,随着AUV 跟踪路径的复杂化程度提高,存在执行器攻击时车辆的方向盘转角以及质心侧偏角有明显的幅值突变和波动情况发生。特别是在4~5.5 s 时,质心侧偏角最大幅值可达0.81°,最大增加213.2%,方向盘转角最大幅值可达-85.67°,最大增加79.4%。由此可得,双移线工况下当执行器攻击发生时, AUV 路径跟踪控制效果变差,跟踪精度更低。另外,还可以看到,在滑模安全控制策略作用下,质心侧偏角和方向盘转角与无执行器攻击发生时基本相同并且方向盘转角和质心侧偏角幅值突变及波动情况得以改善。由此表明,在滑模控制条件下系统鲁棒性增强,当发生执行器攻击时,系统状态可保持与原始状态相同。但从图6 中也可看出滑模控制在增加系统鲁棒性的同时也存在抖振现象的发生,导致AUV 路径跟踪稳定性变差。
从图8a—8b 可看出,在模糊控制作用下,质心侧偏角与方向盘转角抖振现象得以解决并且较滑模控制时更加符合实验要求。从图8c—8d 可知,在模糊控制下,系统跟踪精度提高,横向偏差数值减少。结果表明,执行器攻击对于双移线工况下AUV 路径跟踪控制过程的安全影响更加严重,但在模糊滑模安全控制策略作用下,路径跟踪效果良好,鲁棒性能增强,满足实验要求,进一步验证了该策略的优越性。

图8 双移线工况下模糊滑模控制与滑模控制效果对比
5 结 论
针对自主无人车辆路径跟踪过程中发生执行器攻击的问题,提出了一种模糊滑模安全控制策略以缓解执行器攻击对于车辆前轮转角造成的不利影响, 并且解决了路径跟踪过程中抖振现象的发生。搭建MATLAB/Simulink 和CarSim 联合仿真实验,分别在单移线、双移线工况下对所设计模糊滑模安全控制策略进行路径跟踪有效性验证。得到如下主要结论。
1) 相较于自主无人车辆路径跟踪过程中无执行器攻击发生的情况,当执行器攻击事件发生时,车辆路径跟踪精度降低,单移线、双移线工况下最大横向偏差为0.26 m 以及0.29 m。质心侧偏角和方向盘转角都受到不同程度影响,单移线工况下分别增大253.5%和80.7%,双移线工况下分别增大213.2%和79.4,随着工况复杂程度的不断提高影响变的更加严重。
2) 所设计滑模安全控制策略无论在单移线、双移线工况下都能够很好地缓解执行器攻击造成的不利影响,路径跟踪过程中质心侧偏角和方向盘转角出现突变以及波动等现象得到很好的改善,但是抖振现象的发生使得路径跟踪效果变差,无法满足实验要求。
3) 由于模糊控制规则的加入,抖振现象得以消除并且路径跟踪效果较无模糊控制作用下更好,路径跟踪最大误差减少5.6%、6.2%,方向盘转角减少73.9%、75.4%,质心侧偏角减少249.9%、213.9%,路径跟踪效果更加符合实验要求
4) 由于本研究现阶段只完成仿真验证,下一步将结合ROS 阿克曼智能车完成实物验证,使得所提控制理论更加具有说服力。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
测控技术(2018年12期)2018-11-25
物理教学探讨(2018年1期)2018-02-13
制造技术与机床(2017年9期)2017-11-27
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
航天器工程(2014年5期)2014-03-11
