
基于PCS 变主从协同控制的微电网平滑离网技术*
2024-01-15 06:57刘永辉张国澎孙新迪张思宇
电气工程学报 2023年4期
刘永辉 张国澎 孙新迪 张思宇
(河南理工大学电气工程与自动化学院 焦作 454003)
1 引言
随着经济发展和科技进步,用户对微电网的电能质量有了更高的要求。为保证由储能系统(Energy storage system,ESS)和光伏发电系统组成的微电网系统的电能质量,要求微电网系统在并网和离网模式下,电压和频率均能维持在额定值,同时实现并离网的平滑切换[1-3]。并网时,微电网通过公共连接点(Point of common coupling,PCC)与大电网连接,由大电网维持系统电压和频率的稳定以及功率的平衡;发生非计划性孤岛或计划性孤岛时,微电网系统失去大电网的支持,存在电压和频率不稳定以及功率不平衡造成的ESS 过充和过放等问题,影响微电网系统的电能质量,甚至会导致系统崩溃[4]。因此,实现微电网的平滑离网以及ESS 的过充与过放保护具有重要意义[5]。
文献[6]提出了一种将电压控制与电流控制相结合的逆变器控制策略,系统并网运行时逆变器为电压控制方式,离网时切换为电流控制方式,可实现微电网并离网的平滑切换,但需要在两种控制器间进行切换,系统电压会产生畸变。文献[7]提出了一种改善模式切换时系统波动的复合控制结构,将微电网并网时PQ 控制的电流环和孤岛时下垂控制的电流环相结合,使系统离网前两种控制方式下电流环给定值保持一致,减小电压和频率波动,但电容电压参考值的选取依赖于孤岛检测,而孤岛检测期间系统的稳定性和电能质量无法得到保障。文献[8]提出了一种间接电流控制策略,并网时,将逆变器作为电流源,当脱离大电网后自动切换为电压控制,无需孤岛检测即可实现平滑切换,但此方法运用于小功率系统和提供远程供电时电能质量较差,对逆变器的可靠性要求较高。文献[9]提出一种无需孤岛检测环节就可实现并离网平滑切换的控制策略,采用了一种统一并网电流控制结构,解决了微电网系统对远程通信线路的依赖问题,保证了负载的供电质量,但没有考虑ESS 的过充和过放问题。文献[10]提出一种微电网ESS 过充过放保护方案,当ESS 的SOC超过限制值,将储能变流器(Power conversion system,PCS)由电压控制模式切换至功率控制模式,调整PCS的输出功率,实现ESS的过充和过放保护,但没有考虑负载的需求功率情况,具有一定的局限性。
针对微电网离网时主控部分的PCS在传统下垂控制方式下会存在系统振荡、ESS 过充和过放的问题,提出一种基于PCS 变主从协同控制策略的微电网系统的ESS 过充和过放保护方案,在微电网离网时,采用PCS 变主从协同控制策略,由中央控制器(Mlicrogrid central controller,MGCC)根据系统功率分布和ESS 的SOC 情况,灵活调整PCS 的控制方式、光伏逆变器的指令值以及负载切投状况,并对传统下垂控制进行二次调压调频,实现ESS 的过充、过放保护和微电网的平滑离网。
2 微电网离网的初始状态
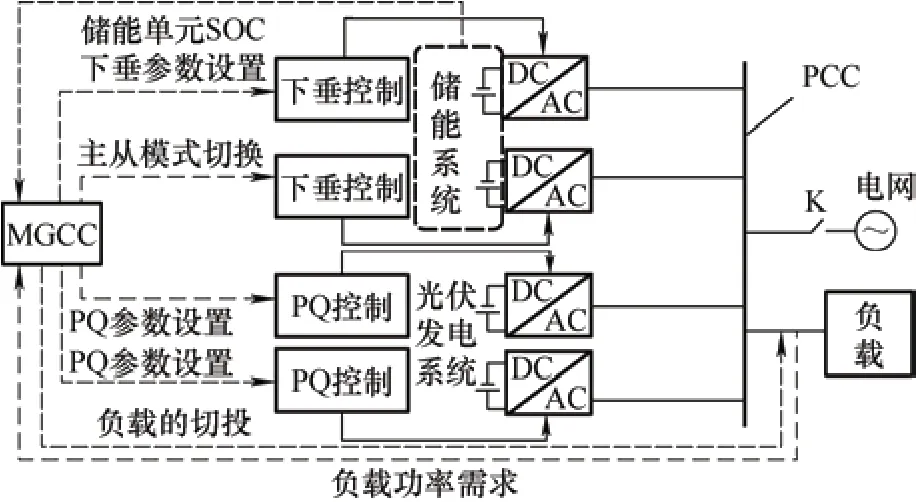
微电网通常包含发电、配电、储电、用电四类设备。为简化分析,忽略微电网中的配电部分,考虑包含两套ESS、两套光伏发电系统和负载的小型新能源微电网,如图1 所示。其中,Spcc为PCC 处的并离网开关,ESS 包括储能电池和PCS;光伏发电系统包括光伏逆变器和光伏电池板,PPV1、QPV1和PPV2、QPV2分别为两套光伏发电系统提供的有功功率和无功功率。负载包含一种主要负载和一种次要负载,Pload1、Qload1和Pload2、Qload2分别为主要负载和次要负载所需要的有功功率和无功功率。
Spcc开关闭合时,微电网运行于并网模式,电压和频率由大电网提供;Spcc断开后微电网进入离网模式,微电网需要能建立自身的电压和频率,稳定运行[11-12]。
微电网离网运行时,光伏发电系统持续为微电网系统提供功率,考虑ESS 的SOC 影响,ESS 具有如下的初始运行状态。
(1) 微电网离网时刻系统满足Pload=PPV、Qload=QPV,存在以下状态。
① ESS1、ESS2 均无充放电现象。
(2) 微电网离网时刻系统满足Pload>PPV、Qload>QPV,存在以下状态。
② SOC1<20%、SOC2<20%,ESS1、ESS2 均停止放电。
③ SOC1<20%,SOC2>20%,ESS1 停止放电,ESS2 为系统提供恒定功率[11]。
④ SOC1>20%,SOC2>20%,ESS1、ESS2 均为微电网系统提供功率。
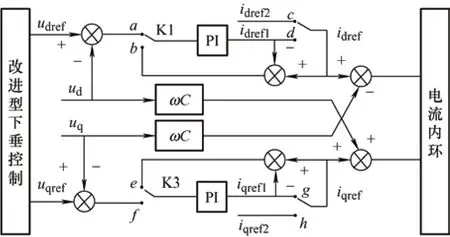
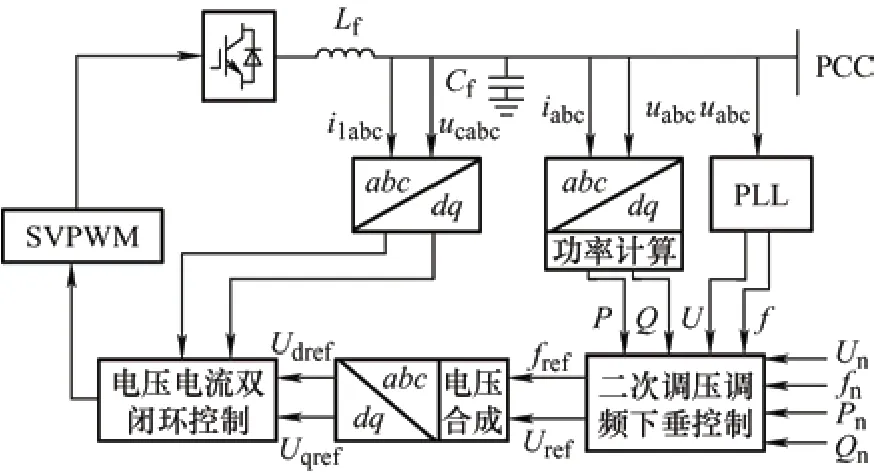
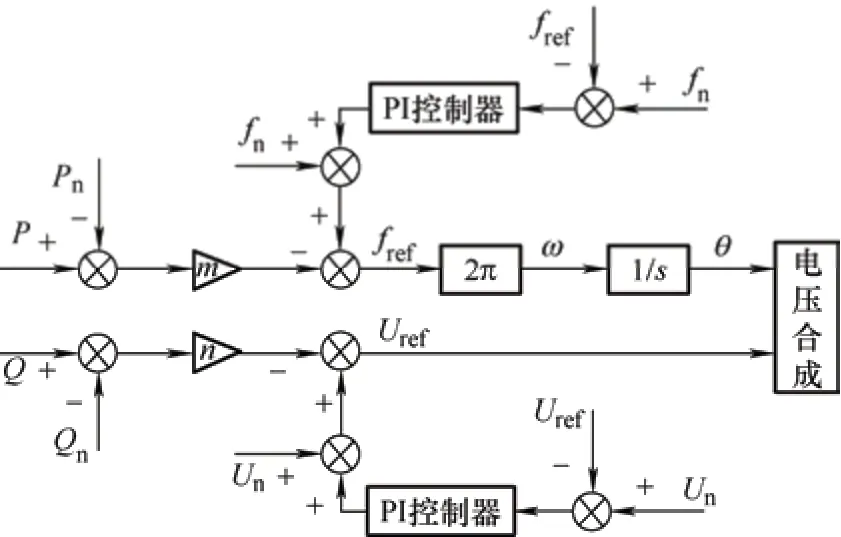
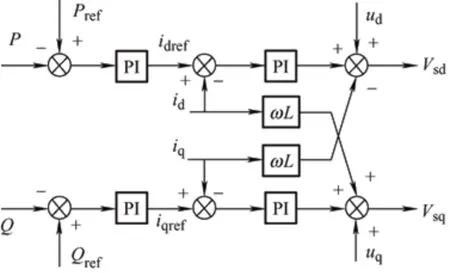
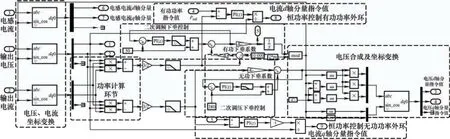
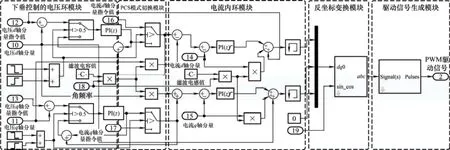
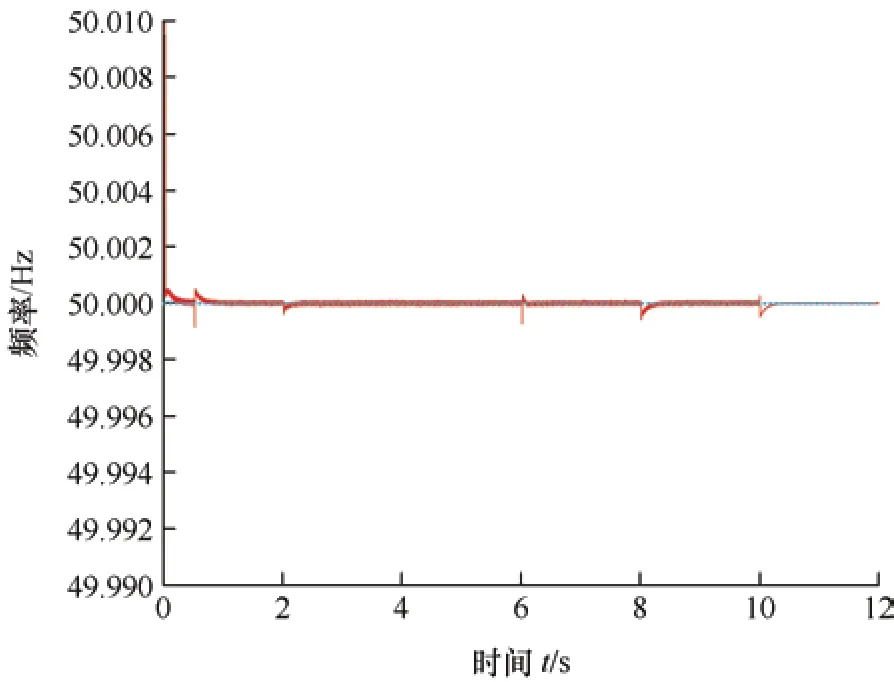
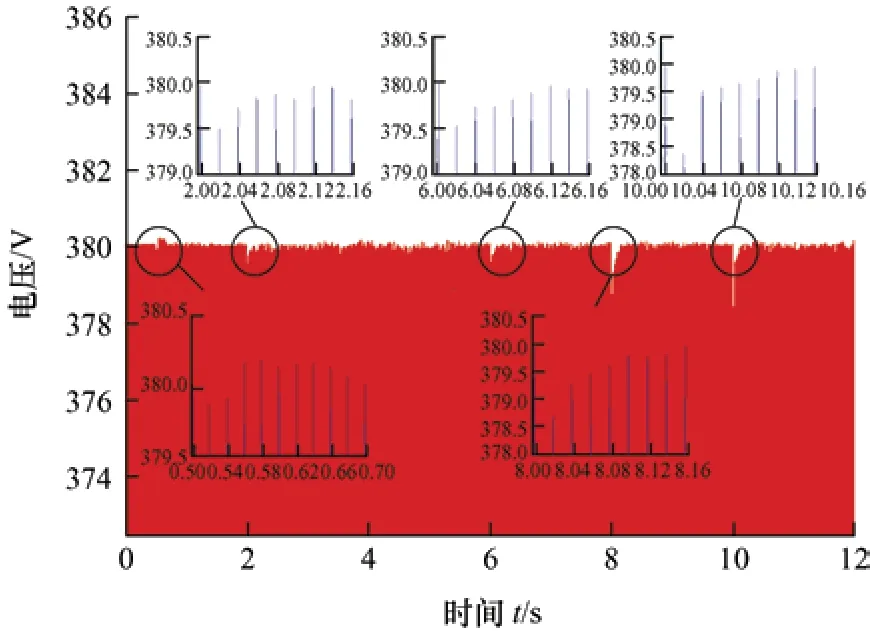
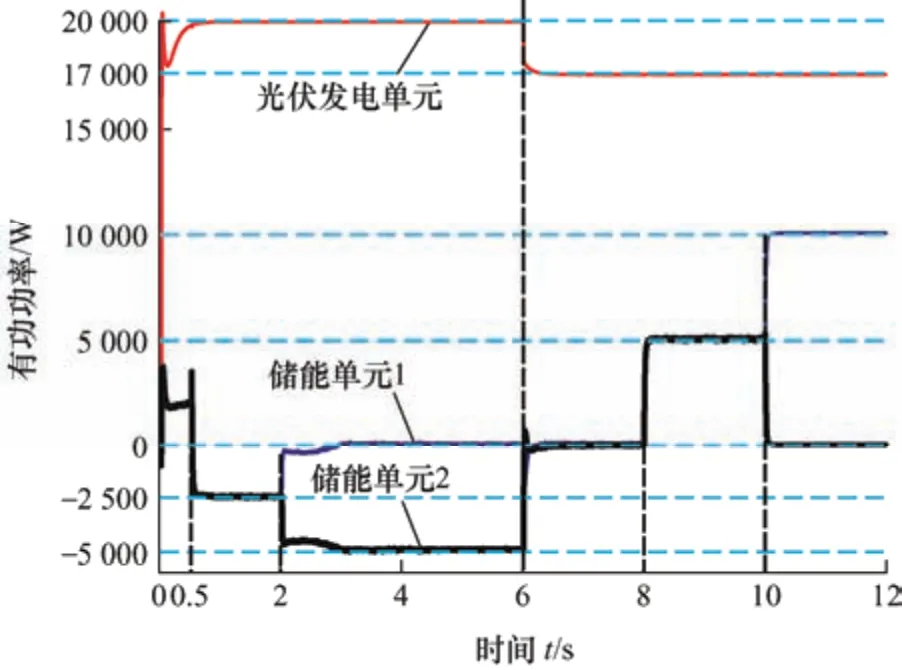
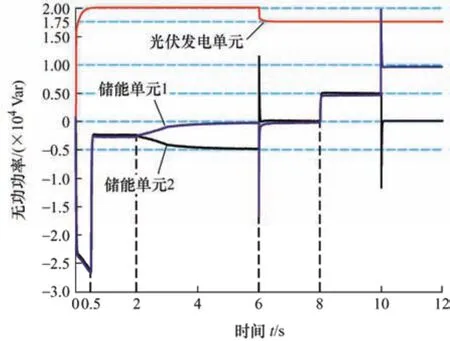
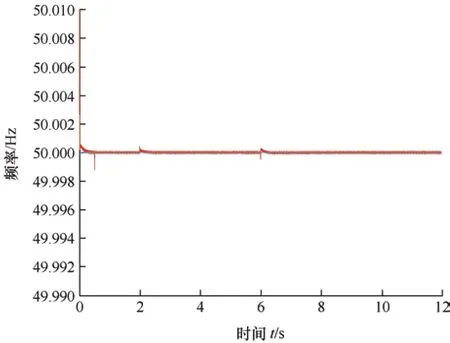
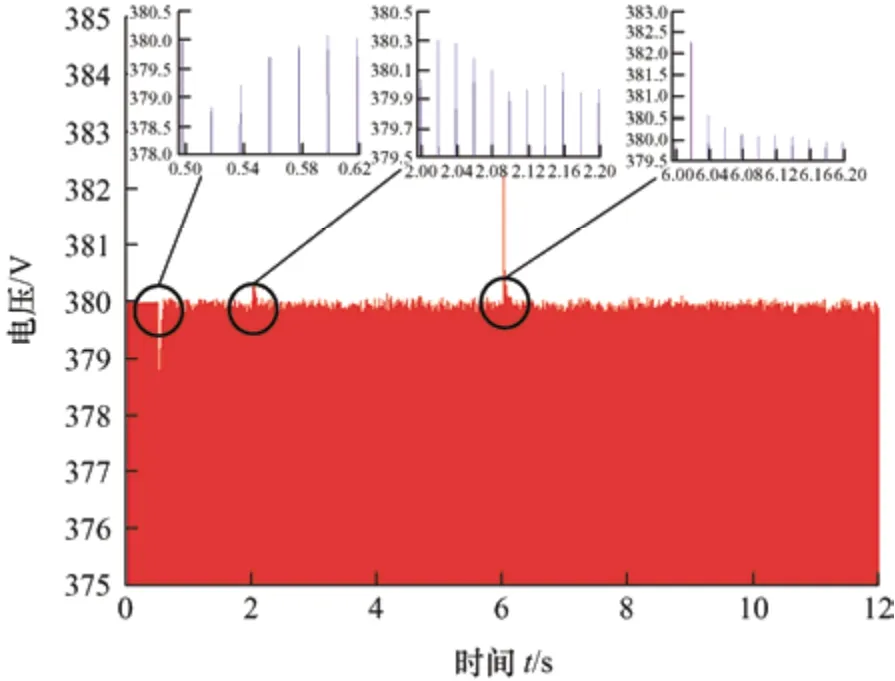
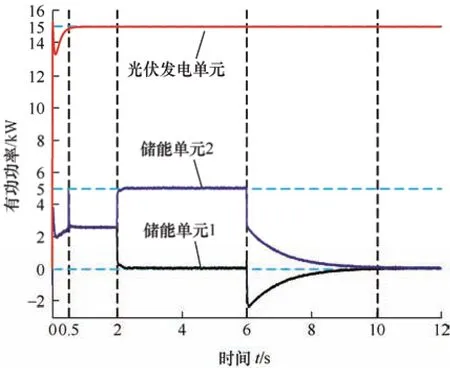
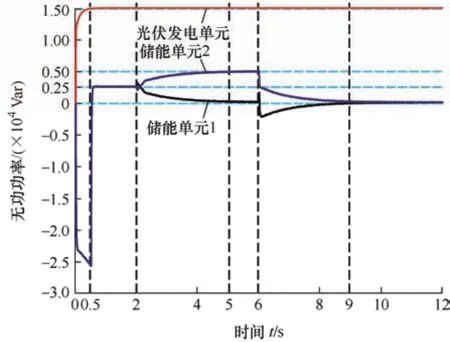
(3) 微电网离网时刻系统满足Pload ⑤ SOC1>90%、SOC2>90%,ESS1、ESS2 均停止充电。 ⑥ SOC1>90%,SOC2<90%,ESS1 停止充电,ESS2 继续充电。 ⑦ SOC1<90%、SOC2<90%,ESS1、ESS2 均进行充电。 综上所述,微电网离网时,ESS 的初始运行状态受ESS 的SOC 状态和微电网系统功率分布情况影响。 微电网离网运行时,选择具有高可控性的ESS作为主控部分,维持微电网系统电压和频率的稳定;选择低可控性的光伏发电系统作为从控部分,为微电网系统提供恒定功率。微电网系统的功率平衡由系统内部单元实现。在忽略功率损耗的情况下,从控部分和主控部分的输出总功率与负载的需求功率保持一致,通过调整从控部分的输出功率和负载的需求功率可实现对主控部分输出功率的控制。ESS的状态与PCS 的控制方式有关,第2 节中ESS 的7种初始状态对应如下PCS 控制方式。 (1) PCS1、PCS2 保持下垂控制方式不变。 (2) 为避免ESS 的过度放电,切除次要负载,保证负载的需求功率不超过光伏单元的输出功率,两个PCS 继续作为主控单元运行于二次调压调频下垂模式。 (3) PCS1 为下垂控制方式,ESS1 停止放电,PCS2 由下垂控制切换为PQ 控制方式,ESS2 继续为系统提供功率。当SOC2<20%,PCS2 由PQ 控制方式切换至下垂控制方式,ESS1、ESS2 均停止放电,若PCS2 运行于PQ 控制方式下,系统提供的总功率依旧小于负载所需功率,则切除其他次要负载,满足负载需求不超过系统总输出功率。 (4) PCS1、PCS2 为下垂控制方式保持不变,均继续放电。当出现SOC1<20%(或SOC2<20%)时,两个PSC 控制方式与(3)相同。 (5) 为避免储能单元的过度充电,调整光伏逆变器PQ 控制中P 和Q 的指令值,使光伏发电系统输出功率等于负载需求功率,PCS1、PCS2 均为下垂控制方式,ESS1、ESS2 均停止充电。 (6) PCS2 由下垂控制方式变成PQ 控制方式,ESS2 继续充电,PCS1 为下垂控制方式,ESS1 停止充电。当SOC2 等于90%,将光伏逆变器PQ 控制中P 和Q 的指令值调整至负载需求的功率值,PCS2切换至下垂控制方式,ESS1、ESS2 均停止充电。 (7) PCS1、PCS2 为下垂控制方式保持不变,ESS1、ESS2 均继续充电,当SOC1=90%时,PCS2由下垂控制方式切换为PQ 控制方式,ESS2 充电,PCS1 为下垂控制,ESS1 停止充电;当SOC2=90%时,调整光伏逆变器PQ 控制的功率指令值,并将PCS2 由PQ 控制方式切换为下垂控制方式,ESS1、ESS2 均停止充电。 综上所述在各种情况下,PCS 的控制方式如表1 所示。 将主从控制、对等控制、分层控制相结合,发挥各自的优势,实现PCS 的变主从协同控制,最终实现微电网的平滑离网。PCS 变主从协同控制结构和基于PCS 的变主从协同控制的微电网平滑离网流程分别如图2 和图3 所示。 图2 变主从协同控制结构图 图3 微电网平滑离网流程图 微电网系统中含有各种类型的电源,在不同运行模式下,其特性以及控制地位也不相同,选取ESS作为主控部分,光伏发电系统作为从控部分。采用对等控制的两个主控单元在系统状态变化时,可迅速调整系统的功率分配情况,且当一个主控单元发生故障时,可将其切除,不影响系统的正常运行,提高系统稳定性。MGCC 优化系统功率分配可以避免储能单元的过充和过放。 PCS 在下垂控制方式和PQ 控制方式间切换时,下垂控制和PQ 控制的电流环一致,切换时共用电流内环,只需要切换外环,采用传统的切换方法,在切换时刻,PQ 控制方式下的功率环输出状态与下垂控制方式下的电压环输出状态不同,即电流环的指令值发生突变,PCS 的输出电流和功率会产生一个大的振荡,影响系统的稳定运行。在下垂控制切换至PQ 控制时,采用缓启的思想,将PQ 控制的初始指令值与下垂控制的输出功率保持一致,以合适的斜率到达预期指令值;在PQ 控制切换至下垂控制时,采用状态跟踪法,保证电流环指令值不发生突变,减小PCS 控制方式切换时,系统电流和功率的振荡,控制原理如图4 所示。 图4 变主从协同控制原理图 MGCC 获取微电网系统各个部分的状态信息,并做出合适的调整,根据负载需求功率、光伏发电系统和ESS 的输出功率以及ESS 的SOC 状态调整PCS 的控制方式,实现系统的平滑离网。PCS 的控制方式由图4 中开关K1、K2、K3、K4 的状态决定。PCS 为PQ 控制方式时,状态开关K1、K2、K3 和K4 分别与点b、c、e和h接触,此时,下垂控制方式下的电压环输出量idref1和iqref1将跟随PQ 控制方式下的功率环输出量idref2和iqref2,实现两种控制方式切换时,电流环的指令值相同,减少系统电流和功率的振荡;PCS 由PQ 控制方式切换为下垂控制方式时,调整状态开关K1、K2、K3 和K4 的状态,使其分别与点a、d、f和g接触,实现PCS 控制方式的平滑切换。图4 中idref1、iqref1、idref2、iqref2可根据式(1)、(2)求解得到。 式中,udref、uqref为下垂控制方式下电压环的指令值。 式中,Pref、Qref为PQ 控制方式下有功功率和无功功率的指令值。 传统下垂控制存在静态误差,负载突变会引起电压和频率的振荡,甚至造成系统崩溃,对传统下垂控制进行二次调压调频,可实现无差调节进而提高系统稳定性[13-15]。二次调压调频下垂控制由功率环和采用PI 控制的电压电流双闭环三部分构成。其控制结构和控制原理分别如图5 和图6 所示。 图5 二次调压调频下垂控制结构图 图6 二次调压调频下垂控制原理图 图5 中Uabc和iabc分别为PCS 输出的电压和电流有效值,经坐标变换后,由式(3)得到有功功率和无功功率平均值;根据二次调压调频的下垂特性得到输出电压幅值指令值Uref和频率指令值fref,Uref、fref的表达式为式(4);对Uref、fref进行电压合成,然后进行坐标变换得到d轴和q轴的电压分量,并将其作为电压外环的参考电压送入电压电流双闭环控制环节得到调制信号,最后将调制信号进行空间矢量调制得到开关信号传输至逆变器。 式中,s为拉普拉斯算子;cω为低通滤波器的截止频率;ud、uq和id、iq为坐标变换后d轴和q轴的电压和电流分量。 式中,Un、fn分别为系统的额定电压和额定频率;Pn、Qn为系统的额定有功功率和额定无功功率;P、Q为低通滤波器输出的有功和无功功率;m、n分别为PCS 的有功-频率下垂系数和无功-电压下垂系数[16-18]。 微电网在并网模式和离网模式下,系统电压和频率的稳定分别由大电网和主控部分维持,而从控部分则为系统提供稳定的功率,从控部分的逆变器运行于PQ 控制方式,PQ 控制结构图如图7 所示。 图7 PQ 控制原理图 PQ 控制由功率环和电流环组成,功率外环为电流内环产生电流指令值,电流内环输出电压的控制信号Vd和Vq,经过反dq坐标变换得到调制信号后,将调制信号进行空间矢量调制得到逆变器的驱动信号[19-20]。电流环指令值为 式中,idref、iqref为功率环输出的电流参考值;L为滤波电感。 为了验证PCS 变主从协同控制的有效性,基于图1 所示的微电网系统结构, 在Matlab/Simulink 中搭建了微电网系统的总仿真模型,其中PCS 变主从协同控制的仿真模型如图8和图9 所示,图8、图9 是根据图4、图6 和图7所示原理图进行搭建的,为了简化分析,将储能和光伏电源用直流源替代,滤波电路的设计以及参数的选择也保持一致,微电网仿真模型的具体参数如表2 所示。 表2 系统仿真参数 图8 下垂控制和PQ 控制的外环仿真模块图 图9 PCS 控制方式切换的仿真模块图 图9 中的K1、K2、K3 和K4 与图4 中的K1、K2、K3 和K4 对应,根据案例1 和案例2 的工况要求,合理设置控制开关状态的脉冲模块的参数,当PCS 为下垂控制方式时,使系统中与四个开关上部连接的电路导通,当PCS 为PQ 控制方式时,使系统中与四个开关下部连接的电路导通。在微电网离网时刻,一共有七种工况,因在工况④的条件下,PCS 控制方式和负载切投情况的调整包含了工况①~③条件下的调整情况;在工况⑦的条件下,PCS控制方式和PQ 控制指令值的调整包含了工况⑤~⑥的调整情况,故设计了案例1 和案例2 分别对工况⑦和工况④进行验证。 并网运行时,系统满足Pload 由图10、11 可知,系统在0.5 s、2 s、6 s、8 s、10 s 时,频率分别波动了0.001 Hz、0.000 5 Hz、0.001 Hz、0.000 5 Hz 和0.000 5 Hz 左右,电压分别波动了0.5 V、1 V、2 V、3 V 和5 V 左右。在所提控制策略下,此系统在离网时刻、PCS 控制方式切换时刻、负载突变时刻以及PCS 切投时刻,电压和频率均可稳定在额定值附近,保证了系统电压和频率的稳定性。 图10 微电网系统频率波形 图11 微电网系统单相电压波形 由图12、13 可知,0.5 s 时光伏发电系统和ESS总输出功率等于负载需求功率,系统离网运行,ESS1、ESS2 均以恒功率充电;4 s 左右PCS2 的功率到达PQ 控制的指令值,PCS1 的功率达到0,此时ESS1 停止充电,ESS2 以恒功率充电;6 s 时,光伏发电系统的输出功率等于负载需求功率,PCS1、PCS2 的输出功率均为0,ESS1、ESS2 均停止充电;8 s 时,PCS1、PCS2 的输出功率相同,ESS1、ESS2和光伏发电系统一同为负载提供功率;10 s 时,PCS2输出功率为0,ESS2 脱离系统,由ESS1 和光伏发电系统为负载提供功率。结果表明此系统在应对系统突然离网、PCS 控制方式切换、负载突变和PCS切投等情况仍可维持正常运行。 图12 微电网系统各单元有功功率 图13 微电网系统各单元无功功率 并网运行时,系统满足Pload>PPV、Qload>QPV的条件,设置两个光伏发电单元的指令值均为PPV=15 kW、QPV=15 kVar,选取两个恒功率负载,负载1:P1=30 kW,Q1=30 kVar;负载2:P2=5 kW,Q2=5 kVar,0 s 时微电网系统并网启动,负载1、负载2 均投入运行,在0.5 s 时断开Spcc,系统进入离网模式,SOC1>20%、SOC2>20%,PCS1、PCS2 为下垂控制方式;2 s 时,SOC1=20%、SOC2>20%,将PCS2切换为 PQ 控制方式,PQ 控制初始指令值为P0=2.5 kW、Q0=2.5 kVar,以2 500 的斜率增加至期望指令值5 kW、5 kVar;6 s 时,SOC1=20%、SOC2=20%,切除负载2,将PCS2 切换为下垂控制方式;12 s 系统运行结束。 由图14、15 可知,系统在0.5 s、2 s、6 s 时,频率分别波动了0.001 Hz、0.000 5 Hz 和0.000 5 Hz左右,电压分别波动了2 V、1 V 和2 V 左右。在所提控制策略下,此系统在离网时刻和PCS 控制方式切换时刻的电压和频率均可稳定在额定值附近,保证了系统电压和频率的稳定性。 图14 微电网系统频率波形 图15 微电网系统单相电压波形 由图16、17 可知,0.5 s 时光伏发电系统和ESS总输出功率等于负载需求功率,系统离网运行,ESS1、ESS2 均以恒定功率为负载提供功率;在5 s左右PCS2的有功和无功功率均到达PQ控制的指令值,PCS1 的功率达到0,此时ESS1 停止放电,ESS2以恒定功率为负载提供功率;6 s 时,在切除次要负载后,光伏发电系统的输出功率等于负载需求功率,PCS1、PCS2 的输出功率均逐渐向0 靠近,在10 s时PCS1、PCS2 的输出功率均为0,此时ESS1、ESS2均停止为负载提供功率。仿真结果表明此微电网系统在应对系统突然离网和PCS 控制方式切换的情况时,仍然可以确保系统正常运行。 图16 微电网系统各单元有功功率 图17 微电网系统各单元无功功率 在对传统下垂控制进行二次调压调频的基础上,提出了一种基于PCS 变主从协同控制的微电网平滑离网方案,通过仿真验证所提方案的正确性和可行性,得出以下结论。 (1) PCS 为改进型下垂控制方式时,当微电网运行模式切换和负载突变时,系统电压和频率可维持在额定值,实现无差调节。 (2) 在微电网离网时刻,光伏发电系统输出功率小于系统负荷时,考虑ESS 的SOC 可通过切除负荷、改变PCS 控制方式等方法实现ESS 的过充过放保护和平滑离网。 (3) 在微电网离网时刻,光伏发电系统输出功率大于系统负荷时,可通过调整光伏发电系统输出功率、改变PCS 控制方式等方法实现ESS 的过充过放保护和平滑离网。3 PCS 的控制方式
4 PCS 变主从协同控制
4.1 变主从协同控制

4.2 主控单元控制方式
4.3 从控单元控制方式
5 仿真验证

5.1 案例1
5.2 案例2
6 结论
猜你喜欢
科普童话·神秘大侦探(2023年1期)2023-05-30测控技术(2018年5期)2018-12-09电子测试(2018年18期)2018-11-14制造技术与机床(2017年6期)2018-01-19电测与仪表(2016年24期)2016-04-12探测与控制学报(2015年4期)2015-12-15电测与仪表(2015年21期)2015-04-09电测与仪表(2015年11期)2015-04-09燕山大学学报(2014年2期)2014-03-11组合机床与自动化加工技术(2014年12期)2014-03-01
