电子开关带电过分相对PETT的影响及其抑制措施
2024-01-16 10:13胡德旺毛承雄王丹杜玉亮刘东辉
铁道机车车辆 2023年6期
胡德旺,毛承雄,王丹,杜玉亮,刘东辉
(1 华中科技大学 电气与电子工程学院 电力安全与高效湖北省重点实验室,武汉 430074;2 中国铁道科学研究院集团有限公司 机车车辆研究所,北京 100081)
为了保证高速铁路动车组的安全运行与速度的提升,一方面需解决特殊工况对列车稳定运行的影响;另一方面高速铁路动车组仍需朝着更加高速化和轻量化的方向继续努力。工频变压器的主要性能可满足现今牵引传动系统的运行需求,但其质量、体积等因素限制了列车传动系统向更高速化和轻量化方向的发展[1]。电子电力变压器(Electronic Power Transformer,EPT)主要由电力电子器件构成,其变压器使用中频变压器,其电能变换具有高效性,且体积、质量上也颇具优势[2]。EPT 在牵引供电领域的应用为电力电子牵引变压器(Power Electronic Traction Transformer,PETT),目前成为了研究热点[3]。现今国内外学者对PETT 进行了不同类型的研究,包括拓扑结构、控制策略等。同时各列车设备生产公司对各自设计制作的实验样机进行了研究,在运行试验上取得一定进展。
基于PETT的牵引传动系统示意图如图 1 所示,与基于工频变压器的牵引传动系统相比,PETT 结合了传统系统中工频变压器与整流器的功能。牵引网将电能传输至PETT 中的整流级,变换成高压直流侧电压后经过隔离级双有源桥(DAB)变换器的作用降压成低压直流侧电压。此时再通过牵引逆变器逆变成三相交流电供给牵引电机工作[4]。
铁道牵引供电为单相供电,为了维持各相功率的平衡和避免相间短路,接触网每隔20~25 km就会存在一处电分相,其中包括一段中性区,该区段无电力供应[5]。传统的车载过分相失电时间较长,列车速度损失大。开关动作迅速、失电时间短的电子开关带电过分相目前受到广泛学者的研究和关注。使用电子开关带电过分相时,由于失电时间较短,列车可以在不卸载牵引力的情况下过分相,但系统也会受到一定冲击。
现今国内外已有学者和机构对于过分相暂态过程以及新型过分相技术进行研究。文献[6]分析并计算了过分相时操作过电压的原理,并研究了过电压大小在合闸角不同时的变化规律。文献[7]将实际动车组模型进行简化来研究过分相引起的过电压,并提出一种抑制方案,并讨论了中性段两端相位差不同时对中性段感应电压的影响。文献[8]主要对列车在进行电子开关带电过分相时产生的合闸过电流进行研究。文献[9]对过分相暂态过程进行线性系统的建模研究,并分析了各过程之间的影响关系。文献[10]分析了牵引传动系统其中一种型号接线的变压器在列车进行过分相时的电压暂态过程,并进行仿真研究。文献[11]利用动车组的数据,搭建牵引传动仿真系统模型,仿真了过分相与其他工况下的励磁涌流等影响。
综上所述,现有研究中关于过分相的研究已经涉及各个方面。而当列车使用PETT 作为核心的牵引传动系统运行时,PETT 在过分相时所受到影响的研究尚有待进行。
1 电子开关带电过分相电气过程分析
电子开关带电过分相系统主要包括两端的供电臂、中性段、电子开关以及传感器,其时序过程如图 2 所示。其中N1~N4为地面位置传感器,当列车经过时,其对应传感器输出为高电平。KA和KB为电子开关,由多级电子开关串联而成,时序图中波形显示高电平时,电子开关闭合;波形显示低电平时,电子开关断开。
在该过分相方式下,T1时列车途径N1传感器,N1输出相 应信号,KA闭 合;T2时列车途经N2传 感器,N2传感器发出信号后开关KA断开,经过极短的死区时间之后开关KB闭合,此时B 相供电臂为中性段供电;T3时列车驶过传感器N4后,开关KB断开,此时列车已完成整个过分相过程。过程中N3传感器没有起到信号传递作用,只有传感器N1、N2、N4起作用,当列车行进方向相反时,负责传递信号的则是传感器N1、N3、N4。
电子开关带电过分相的系统可以化简为等效电路,如图 3 所示,根据其时序过程可以将等效电路分为5 个状态:
状态1:KZA和KZB均断开,列车在 供电臂A 正常运行,此时PETT 可以等效为阻感性运行,列车等待过分相信号。
状态2:开关KZA闭合,供电臂A 与中性线通过开关相连,列车由中性线和供电臂A 供电,由于PETT 等效阻抗偏小,中性线感应电压与LC 电路虽然会产生一定影响,但是影响不大。
状态3:开关KZA断开,PETT 系统失去电力供应,由于断开的电路部分呈现感性,将会出现截流过电压,KZA断开以后电路分成2 部分:一部分是A相供电臂电源与线路组成的回路;另一部分是机车与中性线路组成的回路。由于断开之后电感的能量需要耗散,所以两边回路都会出现高频振荡现象。但两边实际都存在有功损耗,所以最终电压振荡将逐渐减小并稳定,且由于本身电感能量是变化的,所以振荡幅度也与KZA动作时刻有关。另外,和传统牵引系统不同,PETT 输入侧电压并不与变压器相连,而是直接与开关器件相连,所以可通过封锁和发出脉冲来快速控制装置的投切。若地面装置与列车信号配合得当,PETT 可以做到供电死区时间内封锁整流级脉冲过分相,由此降低过电压对列车造成的影响。
状态4:开关KZB闭合,供电臂B 与中性线通过开关接触,列车由中性线和供电臂B 供电。由于此时PETT的高压直流侧电压已经有了一定程度跌落,此时控制系统中外环PI 迅速饱和,从而引起内环给定值增加,相当于RT和LT的等效总体阻抗变小,将引起一定的过电流。
状态5:开关2 断开,供电臂B 与中性线断开,列车由供电臂B 供电。和状态2 类似,虽然中性线的断开会存在一定影响,但是由于机车功率较大,阻抗较小,所以整体影响并不显著。
根据这5 种状态可以搭建电子开关带电过分相的仿真过程,从而得到其对PETT的影响。
2 电子开关带电过分相仿真分析
2.1 仿真模型与参数
PETT的系统原理如图4 所示,PETT 将牵引网的交流电压先整流成高压直流侧电压,然后通过隔离DC/DC 环节先变成中高频交流,最后转换成低压直流侧电压。
PETT 有多种拓扑,文中采用级联非谐振型PETT的拓扑结构,如图 5 所示。该拓扑应用广泛,其控制相对于其他新型拓扑较为简单和成熟。为了在合理的前提下简化分析和仿真不失一般性,将级联的单元数n设定为3,相关参数见表1。

表1 PETT 仿真参数
整流级的控制策略使用电压、电流双环控制,隔离级采用单移相控制。
接触网参数可根据经典参数进行计算,取分相区离变电所15 km,见表2。PETT 系统仿真原理如图6 所示,分相区由A 相供电臂、中性区、B 相供电臂组成,其中PETT 按位置1、2、3、4、5 依次接入,KZA和KZB按不同的分相方式依次闭合与断开。

表2 接触网仿真参数
2.2 仿真分析
电子开关带电过分相过程中列车只有短暂的一瞬间失电,且恢复供电后电压相位发生突变。在该过分相过程中,由于本身电子开关的控制误差导致的弓网过电压存在,且牵引系统并不会封锁触发脉冲,从而前文所分析的弓网暂态电气过程也会对PETT 造成相应的影响。按照前文所分析过分相过程,可以将电子开关过分相仿真过程设置如下:
(1)当仿真时间为0.4 s时,列车由位置1 行驶到位置2,开关1 闭合,供电臂A 与中性线通过开关接触,PETT 由中性线和供电臂A 供电。
(2)仿 真0.6 s时,开关KA断开,PETT 短 时失电。
(3)仿真0.63 s时,开关KB闭合,供电臂B 与中性线通过开关接触,列车由中性线和供电臂B供电。
(4)仿真0.83 s时,开关KB断开,供电臂B 与中性线断开,列车由供电臂B 供电。
得到PETT 输入电压波形如图 7 所示,可以观察到0.4 s 合闸时过电压不明显,这是由于过分相时PETT 仍在消耗大量功率,从而抑制了该部分的过电 压;0.6 s时,开关KA断开,开关KB仍未闭合,此时PETT 输入产生约49.1 kV 过电压,然后开始衰减振荡;0.63 s时,KB闭合,转变为由供电臂B 供电,产生电压尖峰,经过约2~3 个周期畸变后波形基本稳定;0.83 s时,KB断开,产生一次电压尖峰后波形逐渐稳定。
PETT 输入电流波形如图8 所示,可以观察到0.4 s时,KA闭合电流几乎没有受到影响;0.6 s时,开关KA断开,开关KB仍未闭合,电流迅速变为0,这也得益于晶闸管过零点关断的特性;0.63 s时,KB闭合,突然转变为由供电臂B 供电,产生畸变且幅值较大的过电流,经过约2~3 个周期畸变后波形基本稳定;0.83 s时,KB断开,此时列车已经完全驶入供电臂B,电流几乎不受影响。由此可见,PETT的输入电压、电流在电子开关带电过分相时受到一定的冲击,中性段前后供电电压存在相位差,在列车通过中性段之后恢复供电时,供电电压相位与过分相前的相位产生变化,将对PETT的运行产生较大影响。输入电压相位的改变意味着PETT 整流级需要重新锁相,这将导致高压侧直流电压的波动,从而影响低压侧的直流电压。
PETT 高压侧直流电压直到0.6 s 开关KA断开时才开始产生跌落,如图9 所示,0.63 s 换相时跌落速度变得更快,经过前级整流器控制环节稳定,跌落至10 kV 左右再上升至18 kV 后高压侧直流电压开始逐渐恢复。PETT 低压直流侧电压变化过程与高压侧类似,跌落至2.2 kV 再上升至3.4 kV左右开始逐渐恢复。
由仿真可知,PETT 在列车进行电子开关带电过分相时,在过分相前已经在抑制欠压与过压保护误动作,该动作执行之后经历一次前文所分析的电子开关带电过分相时序过程。此时弓网暂态电气过程发生,由于没有断开主断路器,弓网电气暂态过程影响到PETT的输入与输出电压,其中主要有2 个状态造成了主要影响,分别是KA断开且开关KB仍未闭合的暂态过程与KB闭合后的暂态过程,即状态3 与状态4。
其中,KA由于晶闸管的过零关断特性,在电流为0的时候断开,由于PETT 单位功率系数运行,同时也是电压过零点,从而避免了更大的电压和电流冲击。
3 过分相影响的抑制措施
3.1 抑制措施
对于整流级,在短暂的失电后恢复供电时,由于此时高压直流侧电压已经大幅下跌,所以控制系统中电压外环的PI 容易迅速上升并饱和造成电流内环指令值过大,从而导致PETT 输入电流过大,在这种情况下为了减小冲击电流,应使用恒定电流充电策略。当直流侧电压出现大幅跌落并开始恢复时,转换为恒定电流充电,即电压外环PI 输出直接给定,让高压直流侧电容以一定速率上升至额定电压,再转变为电压外环闭环控制。这种控制方式可以达到抑制冲击电流的效果,但其电流给定值必须较低,这将导致高压直流侧电压恢复较慢。为了维持最终输出电压的稳定性,需要采取一定措施,使得隔离级能在高压侧电压较低且不断上升波动的情况下,尽可能稳定地输出低压侧直流电压的额定值。
对于隔离级,虚拟直接功率控制(Virtual Direct Power Control,VDPC)可以更好地应对隔离级输入电压突变的情况,降低该情况下输出电压的波动。所以对于直流侧的电压波动,过分相时隔离级可以使用VDPC 控制方法,如图 10 所示[12]。
VDPC 控制计算为式(1):
式中:dδ为移相比;U*dcL为输出 电压给定值;UdcL为输出电压;UdcH为DAB 输入电压;iDout为负载电流;为外环PI 控制器的输出。
除了抑制短时失电的影响以外,还需要考虑输入电压相位突变的影响,该影响也将引起控制上的不稳定,为了减小电压相位突变带来的影响,需要对锁相速度进行提高。常用的相位检测方式有过零点锁相和锁相环锁相。其中过零点锁相是对电压过零点进行检测,生成同步信号脉冲,触发控制角度和同步信号一致来达到锁相目的。这种锁相方法简单且易实现,但缺点是在实际的装置中,电压往往不是理想的正弦波形,接触网受到线路参数以及其他因素影响,谐波含量丰富,这将导致采用过零检测时,同步信号发生较大抖动。
现有列车的单相锁相环往往采用乘法鉴相,其原理为将二倍频分量滤除的同时,在工作点附近将相位差线性化控制。该锁相方式由于结构中有低通滤波环节,使得系统响应变慢,延时变大,速度不足以应对过分相时的相位突变。
现有研究中三相锁相环需要对输入电压进行坐标变换后进行锁相,单相锁相环技术中发展出一种基于坐标变换的单相锁相环,其原理为通过相关计算构造与被检测对象波形正交的虚拟电压,利用将输出和输入进行虚拟变换后的q轴分量控制至0。比较具有优势的构造方法是利用延时和三角变换,其延时影响可控在1/4 个周期以内。但此种锁相环也有着稳定性较差的缺点,所以可以在正常行驶中使用乘法鉴相,检测出现过分相时网压中断且相位突变的情况下,可转换为基于坐标变换的锁相环控制,原理如图 11 所示。
3.2 仿真验证
对2 种锁相环策略进行仿真得到结果如图12、图13 所示。

图1 基于PETT的牵引传动系统

图2 电子开关带电过分相过程

图3 电子开关带电过分相等效电路

图4 PETT 系统原理框图

图5 级联非谐振型PETT 拓扑结构

图6 PETT 系统仿真原理图

图7 电子开关带电过分相时PETT 输入电压

图8 电子开关带电过分相时PETT 输入电流

图9 电子开关带电过分相时PETT 直流侧电压
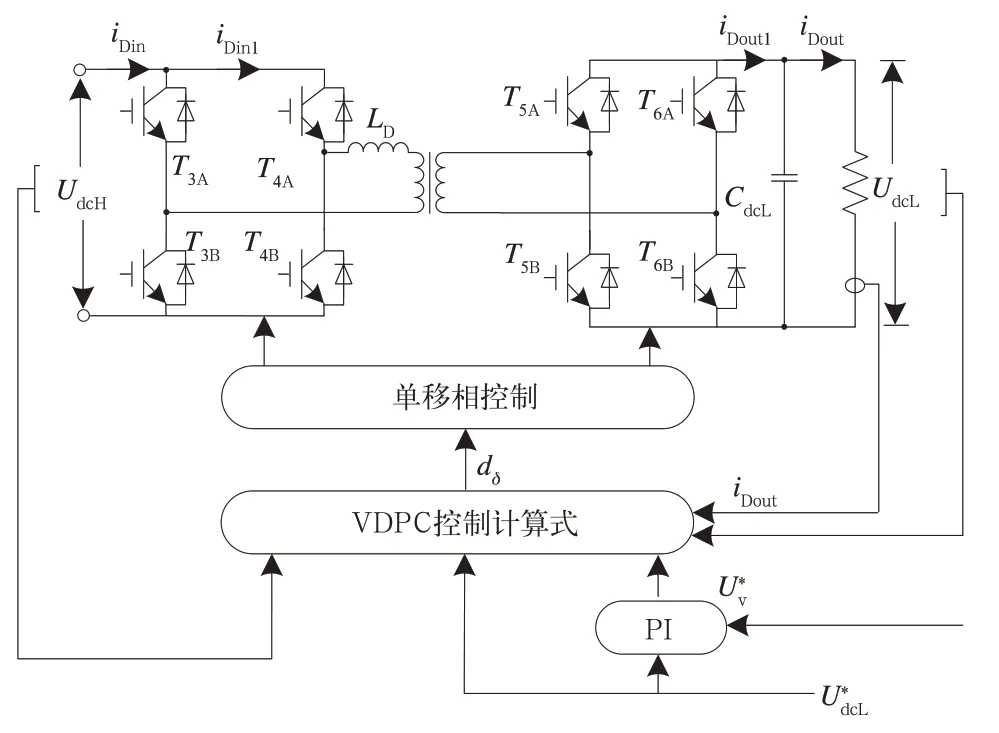
图10 VDPC 控制框图

图11 过分相优化锁相策略

图12 乘法鉴相相位跟踪图

图13 过分相优化相位跟踪图
可以看出优化后的锁相环相位跟踪更加迅速,在电子开关带电过分相时,比乘法鉴相进入稳定锁相的时间提前100 ms。基于上述抑制策略进行仿真验证,得到的仿真结果如图14~ 图16所示。

图14 PETT 输入电压(使用抑制策略后)
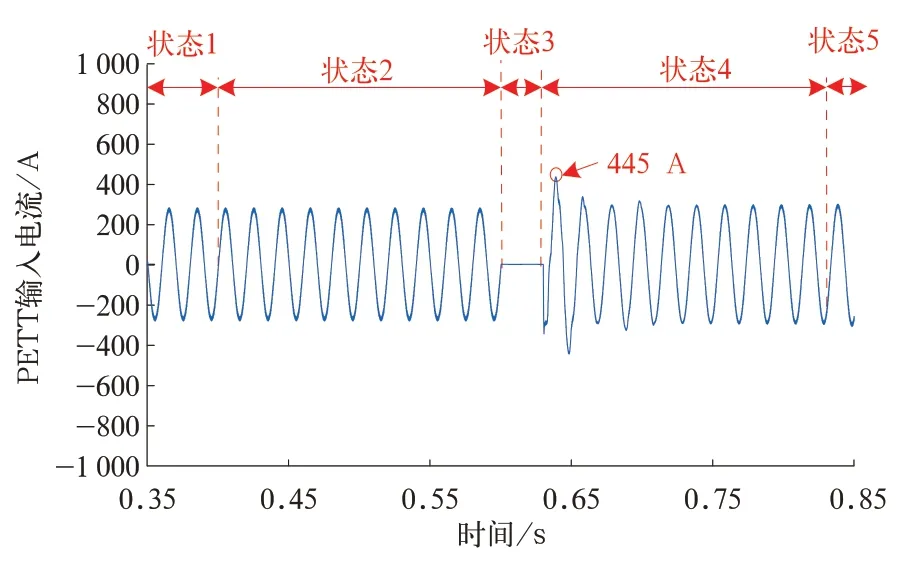
图15 PETT 输入电流(使用抑制策略后)

图16 PETT 直流侧电压(使用抑制策略后)
由图14 可知,PETT 输入电压在状态1 和状态2 时并没有明显变化,在状态3 时由于采取了配合分相信号闭锁脉冲,所以直流侧电容电压无法通过开关器件将电压传递到交流侧,此时PETT 输入波形为中性线上的暂态电压,当接通供电臂B的电压经过小幅振荡后恢复稳定。由图15 可知,在状态3 时电流完全为0,状态4 时过电流最大445 A,低于使用抑制策略之前。由图 16 可知,直流侧电压波动也明显减小,抑制效果良好。
由于实际分相区存在0°、60°、90°、120°等形式,为了研究A、B 供电臂在不同相位差的情况下过电压、电流变化规律以及抑制影响策略的效果,对这几种相位差情况下的电压、电流数据进行统计,如图17 所示。由图 17 可知,在分相区相位差在0°、30°、60°、90°、120°的情况下,输入电压、电流过冲在抑制策略下有所降低,高压直流侧电压过冲减少,低压直流侧电压跌落时间变短,跌落幅度变小,抑制效果良好。

图17 抑制策略对影响的抑制对比(相位差不同时)
4 结论
文中分析了电子开关带电过分相的时序过程,并对该过分相方式的电气暂态过程进行分析,最后通过仿真分析得到结果,针对电子开关带电过分相过程中相位突变的问题,提出了基于坐标变换的锁相环与传统乘法鉴相方法结合的过分相优化锁相策略,并结合整流级和隔离级对于冲击电压与电流的抑制策略,达到了减少电子开关带电过分相对PETT 影响的目的,并通过仿真验证。
猜你喜欢
福建建筑(2021年6期)2021-07-05
电子测试(2018年18期)2018-11-14
电子测试(2018年14期)2018-09-26
电子测试(2018年15期)2018-09-26
电测与仪表(2017年24期)2017-12-19
智能建筑电气技术(2016年4期)2016-09-13
电测与仪表(2016年6期)2016-04-11
电测与仪表(2015年9期)2015-04-09
电测与仪表(2015年8期)2015-04-09
物理实验(2015年9期)2015-02-28