
某轨道交通项目车辆全自动驾驶升级改造设计
2024-01-17 07:41王丹梅尚江傲钱江林万晓峰
现代制造技术与装备 2023年11期
王丹梅 尚江傲 钱江林 万晓峰
(中车株洲电力机车有限公司,株洲 421001)
城市轨道交通的自动化等级(Grades of Automation,GOA)分为GOA0 到GOA4 共5 个等级。目前,国内主流的基于通信系统的列车自动控制(Communication Based Train Control,CBTC)系统属于GOA2 等级,是一种半自动列车运行系统,其列车自动驾驶系统(Automatic Train Operation,ATO)模式下的运行安全完全依赖于人工,在车辆段和停车场仅依靠驾驶员根据轨旁信号显示行车。某城市轨道交通项目由一期工程和西延工程组成,其中一期工程为GOA2 等级,西延工程为GOA3 等级。为实现2 条线路的全线贯通运营,需要对一期工程车辆进行GOA3 自动化升级改造。
1 全自动驾驶功能需求分析
全自动驾驶的场景一般分为正常场景、故障场景和应急场景3 大类。某轨道交通项目一期线路为有人值守的全自动运营场景,即GOA3 等级,共涉及14 个正常运营场景、13 个故障运营场景和7 个应急运营场景。为满足场景中的全自动运行相关模式转换、列车出库、列车进入正线服务、列车进站、折返换端、自动洗车、自动转线作业、车门故障、站台门故障以及列车远程广播等功能需求,车辆需要进行相应的全自动功能升级改造,包括全自动模式(Fully Automatic Mode,FAM)相关功能、跳跃功能、车门和站台门对位隔离功能、司机室车门防护功能、全自动方向控制、全自动洗车控制、列车自动控制系统(Automatic Train Control,ATC)保持制动施加控制以及自动鸣笛等相关功能[1-2]。主要的全自动功能需求说明,如表1 所示。
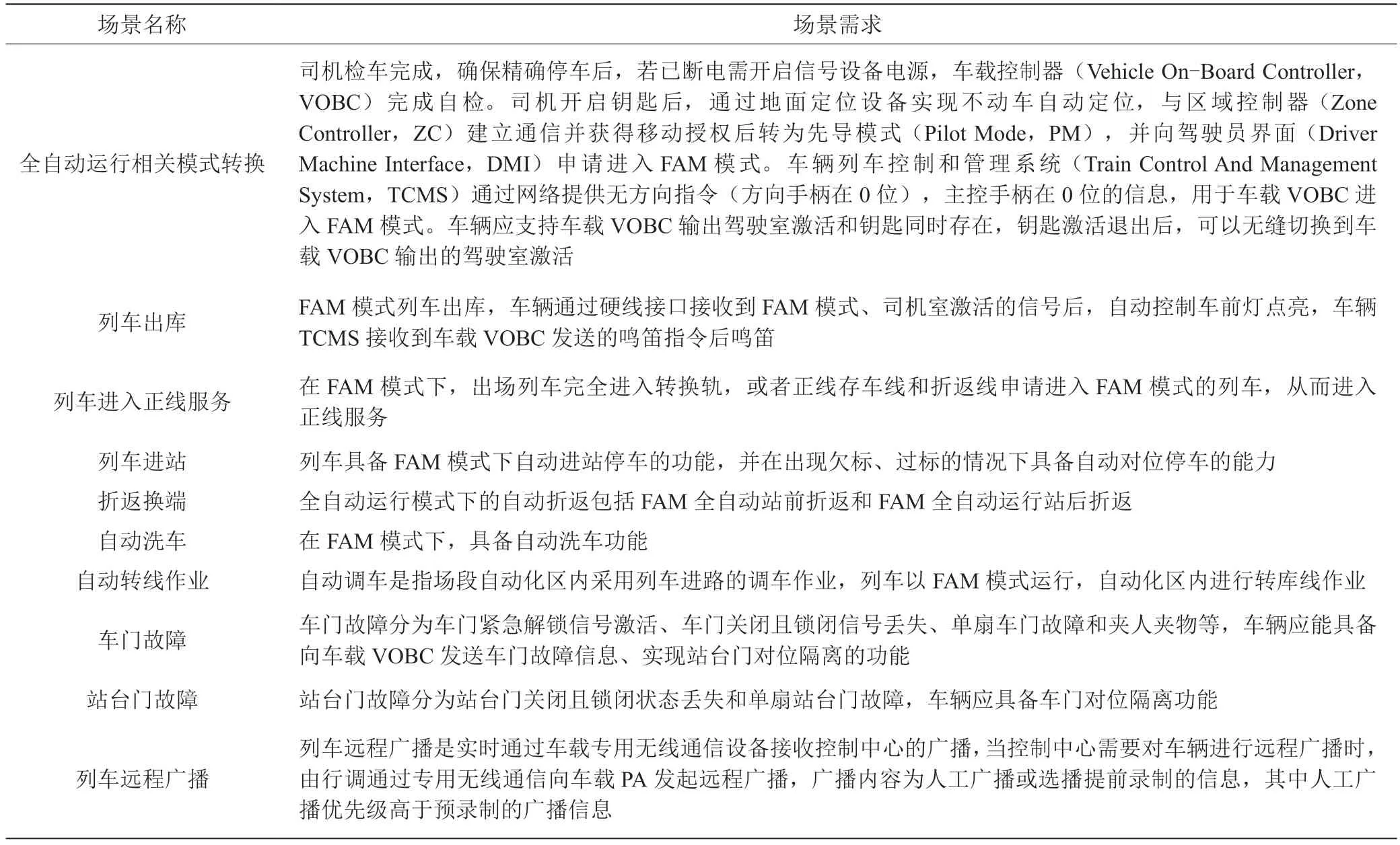
表1 全自动功能需求说明
2 信号接口分析
2.1 机械接口
车载信号系统新增司机室天线,增加与场段的车地通信功能,实现场段的全自动功能,同时将二合一合路器更换为三合一合路器,车辆改造实现各设备的布置。
2.2 电气接口
车载信号系统电气接口新增FAM 模式、ATO 前向、ATO 后向、跳跃模式和ATC 保持制动等硬线接口,车辆电路进行相应改造后能够适应各项全自动控制功能。
2.3 MVB 协议接口
车载信号系统多功能车辆总线(Multifunction Vehicle Bus,MVB)协议中增加转译字符,提升数据通信的可靠性和安全性。同时,增加方向手柄和牵引制动手柄零位信息、制动单元损失数量、跳跃指令、自动洗车和FAM 模式等全自动功能相关的信号反馈,车辆软件进行相应改造升级[3]。
3 车辆改造方案
为满足GAO3 全自动升级改造,对车辆车体、屏柜、电气原理、列控、车门、牵引、制动、布线、乘客信息系统(Passenger Information System,PIS)和司控器等系统及部件进行了相应改造。
3.1 车体改造
车体改造主要包括新增信号天线、新增FAM 指示灯进行相应的接口更改,安装位置分别如图1和图2所示。

图1 新增天线位置
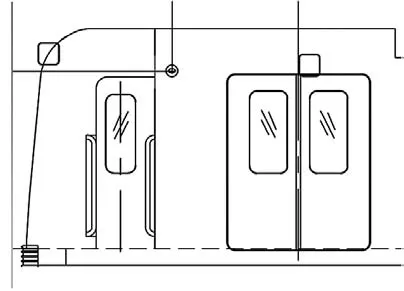
图2 新增FAM 指示灯位置
3.2 电气原理改造
电气原理改造主要涉及方向控制、跳跃模式控制、FAM 模式、ATC 保持制动施加和ATO 激活条件等电路改造[4],同时新增继电器、开关等低压器件实现相应的电路功能。改造后的方向控制电路如图3 所示,新增了全自动模式下的方向控制和跳跃模式下信号对车辆的方向控制功能。FAM 模式、跳跃模式、保持制动控制电路,如图4 所示。

图3 方向控制电路
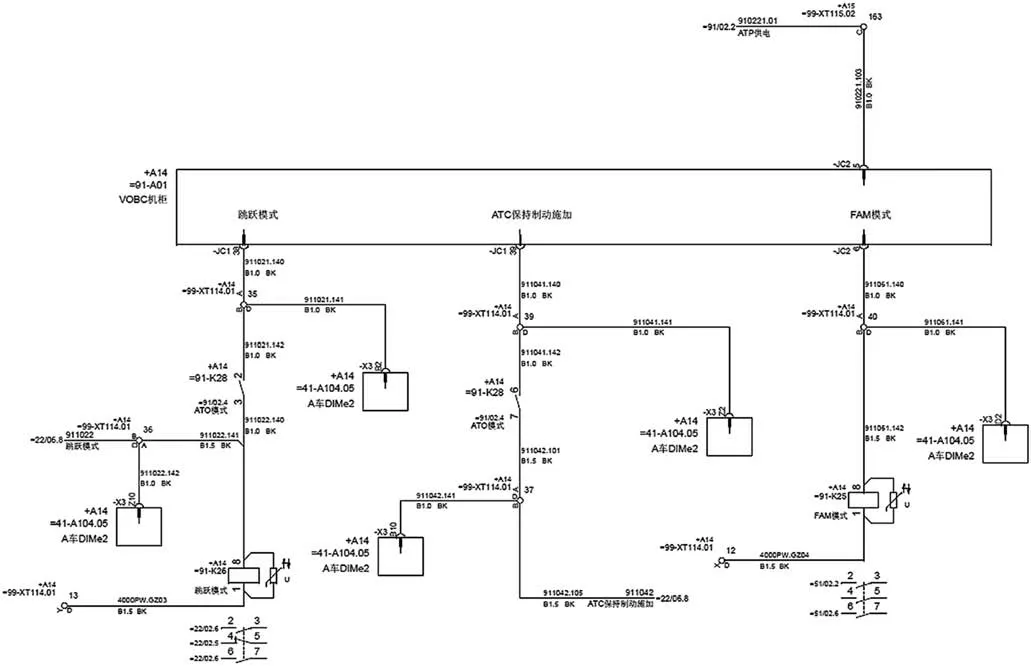
图4 FAM 模式、跳跃模式、保持制动施加控制
另外,更改其他电路。例如:将司机室车门关闭状态作为牵引封锁条件,防止司机上下车过程中自动发车带来的安全隐患;ATO 激活条件由原来的司控器方向手柄向前及主控器手柄零位改为增加司控器钥匙、方向手柄零位和司控器手柄零位的条件。
3.3 屏柜改造
屏柜改造主要涉及新增网络输入/输出(Input/Output,I/O)模块、二合一合路器更换为三合一合路器、新增继电器及端子排等部件。设备改造后的方案,如图5 和图6 所示。

图5 新增继电器

图6 新增网络I/O 模块
3.4 软件改造
车辆软件主要针对TCMS 软件、车门软件、牵引和制动系统软件、PIS 等系统进行软件升级改造。其中车门新增对位隔离功能,PIS 新增远程广播及全自动报站功能,TCMS、牵引和制动实现跳跃模式下的控制功能。文章仅对跳跃模式下的车载各子系统软件控制功能进行说明。
全自动驾驶模式下,若列车到站停车距离停车窗口±50 cm,则车门和安全门不能打开。为保证ATO 子系统能够自动进行站停位置调整,信号系统向列车输出缓慢跳跃调整指令。在列车进行跳跃操作时,跳跃模式为电平信号,在整个跳跃过程中持续给出。在列车进行跳跃操作时,信号系统会输出方向向前指令或方向向后指令,并根据对位停车所需的跳跃距离,向车辆输出ATO 牵引指令和ATO 制动指令。车辆根据信号系统输出模式、方向、ATO 牵引指令和固定级位,牵引系统按照信号输出执行,信号控制列车加速至目标速度。达到目标速度后,ATO 继续施加牵引指令和级位,抵消制动系统施加的保持制动[5]。同时,信号系统输出的制动指令和级位等会控制列车减速至零,信号系统会在车辆达到零速后输出保持制动指令。需注意,车辆在一定条件下能够自动施加保持制动。
4 结语
通过将某城市轨道交通项目一期车辆及线路全自动功能升级为GOA3,实现与西延工程车辆的全线贯通运行,目前已完成相关联调试验。通过该项目的成功实施,为将来GOA4 全自动无人驾驶功能升级提供了技术积累和经验。
猜你喜欢
汽车工程师(2021年12期)2022-01-17
装备制造技术(2020年11期)2021-01-26
铁道通信信号(2020年1期)2020-09-21
铁道通信信号(2018年12期)2019-01-31
铁道通信信号(2018年7期)2018-08-29
电子制作(2018年11期)2018-08-04
铁道通信信号(2016年11期)2016-06-01
工程建设与设计(2016年1期)2016-02-27
科普童话·百科探秘(2015年5期)2015-05-26
汽车维修与保养(2015年2期)2015-04-17
