某型蛙人运载器辐射噪声测量与特征分析
2024-01-17 07:16李玉阳李锐李遥
声学技术 2023年6期
李玉阳,李锐,李遥
(1.海军潜艇学院,山东青岛 266199;2.中国科学院声学研究所北海研究站,山东青岛 266114;3.中国船舶工业系统工程研究院,北京 100094)
0 引言
随着水下特种作战和水下运载技术的快速发展,蛙人在浅海防御渗透、港口入侵、水下设备破坏中扮演着重要的角色,如图1所示的水下运载器作为一种带有小型螺旋桨的手持式推进设备,前端密封舱室配置有电机及蓄电池等电子元件,后端为螺旋桨及手持握把部分。蛙人运载器不仅可以辅助蛙人快速前进,而且可以提供照明、观察和侦察手段,对蛙人水下作战任务的顺利实施具有重要作用,也是各国针对蛙人水下作战研发的关键装备。自第二次世界大战以来,以战斗蛙人特种破袭为代表的水下特种作战受到越来越多国家军队的重视[1-2],从而成为重要的海战和特种作战样式。无论是舰船还是潜航器,在水下机动过程中都难免会产生辐射噪声,进而破坏其隐蔽性。蛙人水下运载器运动时同样会产生辐射噪声,对其探测发现可以归结为水下小、慢目标的探测问题。这类目标运动过程中产生的辐射噪声远低于舰艇噪声,且具有机动性强、目标反射回波及本身的声辐射特性均不明显等特点。因此,对于蛙人运载器等水下小目标的探测、定位和跟踪等一直是水下目标警戒探测领域的重点和难点问题。

图1 蛙人和蛙人运载器Fig.1 Frogman and the frogman vehicle
本文将水下蛙人运载器辐射噪声测量方法等同于船舶水下辐射噪声测量方法。国际标准化组织为比较各类商船水下辐射噪声的大小,评估不同船舶之间水下辐射噪声性能,在2016年制定了深水辐射噪声测量[3],并于2019年进行了更新[4]。各标准对天气条件的要求基本一致,一般要求海况不大于3 级,风力不大于蒲氏4 级。各标准对水听器的布放数量和布放方式的要求大同小异,主要以布放3个水听器的方式为主,布放要求主要依据ISO17208[3-4],国防科工委军用标准[5]和中国船级社的船舶水下辐射噪声指南[6]浅水中测量布放要求采用1个水听器。各标准规范对背景噪声的修正方法基本一致,即当信噪比大于10 dB时,认为背景噪声对船舶水下辐射噪声测量结果的影响可以忽略;当信噪在3~10 dB之间时,可以基于能量原理对背景噪声进行修正;当信噪比小于3 dB 时,认为数据无效。测量结果以1/3 oct声压级或声源级来表示船舶水下辐射噪声的大小,通常使用距离船舶参考点1 m处的声压级或声源级评估被测船的水下辐射噪声水平。
被动声呐目标识别主要是根据目标辐射噪声的特征来实现。功率谱估计及LOFAR 分析是获取目标噪声特性的有效方法,即通过时域到频域的变换,将时间域上的复杂波形转换成频域上各频率分量的分布特征。陈敬军等[7]、王菲等[8]利用辐射噪声功率谱对线谱和连续谱的提取方法进行了论述。螺旋桨噪声是舰艇、鱼雷、蛙人运载器等水中目标的主要噪声源。螺旋桨噪声常常会产生幅度调制,通过解调处理的调制谱中存在着许多离散线谱,其位置对应螺旋桨的轴频、叶频及其谐波。利用这些离散线谱,可估计螺旋桨的轴频和叶片数,从而为被动声呐目标检测和分类提供重要依据。陶笃纯[9]研究了螺旋桨的空化噪声和噪声节奏的物理机理。吴国清等[10]对舰船辐射噪声的线谱进行多方面的研究,提取了舰船辐射噪声的线谱特征、双重谱特征以及平均功率谱特征,并利用模糊神经网络对舰船目标进行分类。程玉胜等[11]系统研究了水声目标识别的机理、建模、特征提取和识别方法。
为了反蛙人作战,世界各海军强国均在水下蛙人警戒探测方面开展了大量工作。加拿大研制的蛙人探测声呐对使用运载器的蛙人的探测距离最远可达2 000 m,并可360º全向监视或扇面监视[12-13]。李刚强等[14]针对蛙人运载器装备研制的需要,设计了基于HLA 的蛙人运载器作战效能评估系统。宋宏健等[15]研制的水下反恐监视系统,其设备包含了水下蛙人探测声呐和小型水下探查机器人等。
虽然近年来水声信号处理和识别技术有了明显进步,水声目标探测设备的智能化程度也越来越高,但是对蛙人运载器这类小、慢目标的探测仍面临诸多困难。本文针对蛙人水下运载器实际探测需求,系统开展了某型蛙人运载器的水池测量和海上测量实验,采集了某型蛙人运载器不同工况条件下的辐射噪声信号,分析了其声源级和指向性,提取了其时域、频域典型特征,为蛙人运载器的水下探测、识别研究提供了基础数据支撑。
1 辐射噪声测量实验
参照GJB 4057—2000:舰船噪声测量方法[5]开展相关实验设计和实验组织。实验测量内容主要包括蛙人运载器辐射噪声指向性、宽频带声压级和频谱特征。实验场地在中国科学院声学研究所北海研究站消声水池和青岛外海试验场进行。消声水池大小为20 m×12 m×8 m,六面安装有消声尖劈,水池的自由场范围为10 m×6 m×3.85 m,实验设备布放在水池自由场范围内。消声水池实验主要完成运载器辐射噪声声源级指向性测量,海上实验主要完成运载器辐射噪声时频特征测量。实验时设计了4种典型工况,分别对应运载器推进力载荷的12.5%、25%、50%和100%时的航速,螺旋桨为三叶桨结构。
蛙人运载器水池实验设计如图2所示,运载器固定在可旋转的转台上,位置距水面3 m 处,3 只测量水听器间距0.5 m,垂直吊放在距运载器5 m处,运载器中心点与第2只水听器中心点位于同一水平面。运载器指向性测量时,运载器处于工况二状态,停止所有与实验无关的机械设备,实验初始状态螺旋桨正对水听器,开启伺服电机使转台缓慢匀速旋转360º,共完成两次有效测量。运载器声源级测量时,水听器处于运载器辐射噪声最大部位延长线上,分别测量运载器4 种典型工况的声源级,每种工况测量时均按要求记录航速稳定后的3 min有效信号。
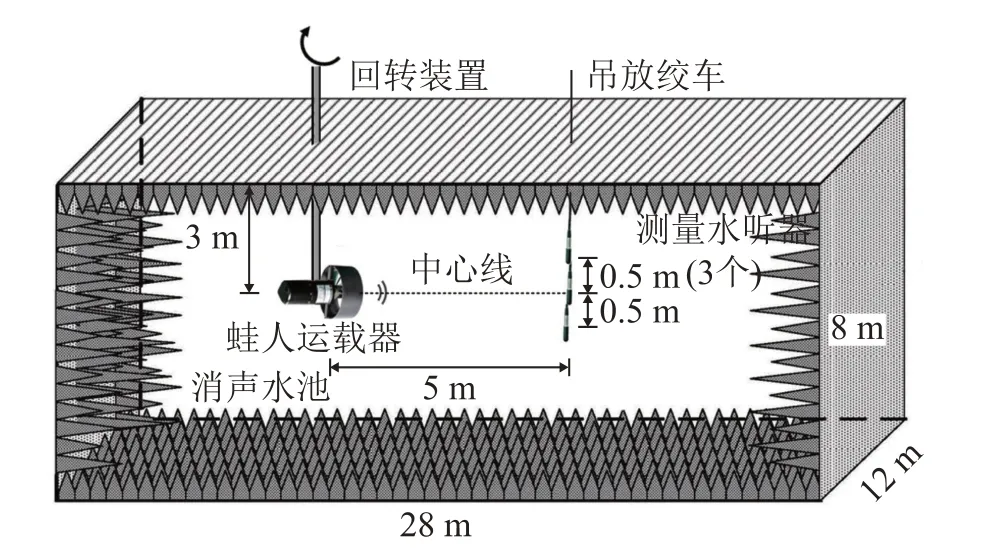
图2 消声水池测量蛙人运载器辐射噪声的布设示意图Fig.2 Layout diagram of measuring the radiation noise of frogman vehicle in anechoic pool
蛙人运载器海上实验设计如图3所示。测试海域水深为35 m,海底地形平坦,底质为泥沙底,海况为2级,天气晴,微风,周围5 km范围内没有其他舰船目标,与实验无关的机械设备均停止运转。海上实验测量设备由12个阵元的声学刚性线阵(水听器间距0.25 m)、电子仪器舱(配置姿态仪、数据采集单元、通信单元和供电单元)、海洋表面浮体(配置北斗定位设备和通信天线)、甲板记录单元(配置水声信号处理与显控软件)等组成。声学刚性线阵安装于电子仪器舱上部,并坐底布放于A点,蛙人携带水下运载器由B点开始做匀速直线运动航向A点,A、B两点间相距500 m,水下作业深度为10 m,蛙人在A、B两点间往返一次计为一个航次,分别以工况一、工况二和工况三(不同行进速度)状态航行,共进行3个有效航次的测量。因运载器工况四为极限工况,并非蛙人水下作业常用工况,且仅能航行3 min,故海上测试仅规划实施了工况一至工况三的航次。数据处理中,针对12 元阵波束补偿后的时域数据进行了分析和处理。

图3 海上测量蛙人运载器辐射噪声的布设示意图Fig.3 Layout diagram of measuring the radiation noise of frogman vehicle at sea
2 数据分析处理方法
2.1 声源级分析方法
声源级是声轴上距声源1 m处产生的声强相对于参考声强的分贝数,是衡量目标辐射噪声大小的重要参量,其表达式为
式中:I1为距声源1 m 处的声强,I0为参考声强。参考声强指均方根声压为1 μPa 的平面波的声强,声轴指声源指向性图的最大响应方向。
目标辐射噪声为宽带噪声,不同频率上的噪声强度各不相同。由于水下目标辐射噪声的机理很复杂,声源级难以通过理论计算得到,需要进行实际测量。
测量步骤:
(1)在声源的一定距离处和某一频率f附近的1Hz带宽内,测量辐射声场的声压谱级;
(2)按作业水域声传播规律折算得到距声源1 m处的声压谱源级LSP;
(3)已知声压谱源级LSP与频率的关系曲线后,在被动声呐接收带宽内对各个频率分量的谱级值作功率求和,即得出噪声辐射目标的声源级LS。
2.2 频域特征分析方法
辐射噪声频域分析包括LOFAR 谱分析和DEMON谱分析。
针对获取的辐射噪声阵元域信号,做LOFAR信号处理。对于长度为N的平稳随机过程,其功率谱可用周期图来估计,表达式为
针对获取的辐射噪声阵元域信号,做DEMON信号处理。绝对值低通解调是宽带噪声解调最常用的方法,其提取包络谱的主要过程为:首先将接收到的目标辐射噪声经过带通滤波后将信号取绝对值,然后将取绝对值后的信号通过低通滤波器,最后进行谱分析即可得到该信号的包络谱。
对于周期性局部平稳过程的目标辐射噪声,其包络谱一般有多根线谱,对应不同的调制频率和倍频分布,首先考虑单根线谱的情况。数学模型可以表示为
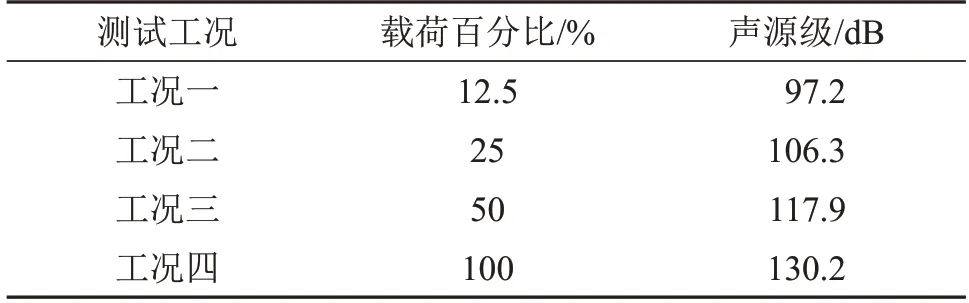
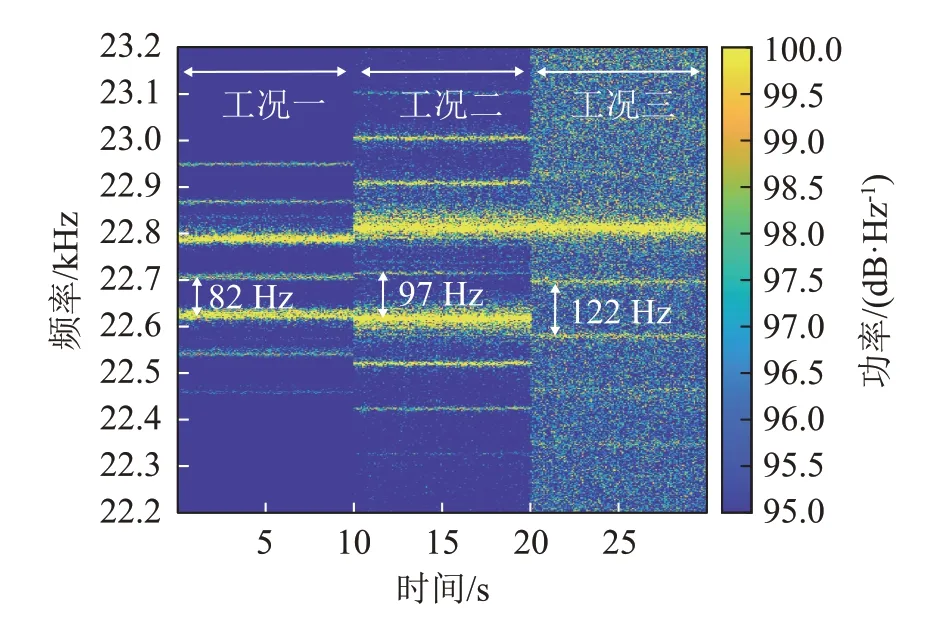
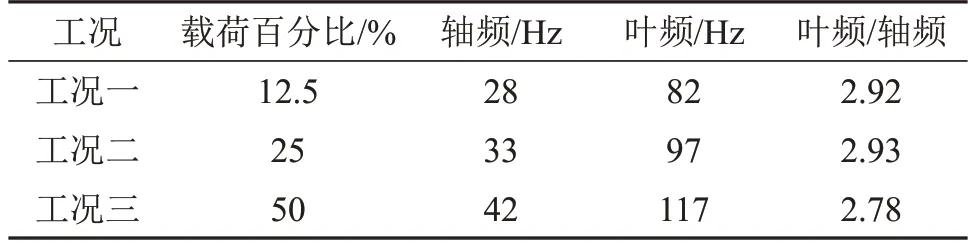
其中:x(t)是窄带平稳白色高斯随机过程,m为调制系数,0 其中:B是宽带噪声x(t)的带宽,B0为频率分辨率,T为信号长度。辐射噪声包络谱中轴频f0处的谱强度为 因为局部平稳高斯过程S(t)加上平稳高斯噪声n(t)得到的Y(t)仍然可近似视为一个局部平稳高斯过程,式(8)可转化为 比例因子α的计算公式为 α与输入信噪比RSN有关,直接影响辐射噪声包络谱的调制深度,当RSN>>1 时,α≈1;当RSN<<1时,α≈RSN。 这种情况下对应的目标辐射噪声包络谱零频率谱强度S(0)、连续谱均值μ0和标准差σ0分别为 包络谱轴频f0处的谱强度为 根据水池声源级实验测量结果,选取水听器接收信号时长为3 min 的稳定信号进行声源级分析,采样频率为128 kHz,频谱分析采用1/3 oct线性平均方式,加窗类型为汉宁窗,平均时间为8 s。四种航速下的1/3 oct频带声压级如图4所示。 图4 不同工况下蛙人运载器辐射噪声的频谱随频率变化的曲线Fig.4 Noise spectrum curves radiated by the frogman vehicle under different working conditions 与环境噪声频谱相比,工况一的辐射噪声有效频段为100 Hz~2 kHz 和22~22.5 kHz。随着运载器航速载荷的增加,辐射噪声高频部分的能量随之增加,工况二、三、四的辐射噪声的有效频段变为100 Hz以上的测量频段,800 Hz频点处声压级提高了19 dB。将宽频带声压级的测量结果折算到距运载器1 m处计算运载器的声源级,表1给出了运载器四种推进载荷航速下声源级的统计结果。工况一至工况四的声源级分别为97.2、106.3、117.9 和130.2 dB。 表1 不同工况下蛙人运载器辐射噪声全频带声源级Table 1 Source levels of the radiation noise of frogman vehicle in full frequency band under different working conditions 根据水池指向性实验测量结果,起始状态螺旋桨正对水听器,使运载器均匀且慢速地旋转360º,选取稳定信号段的有效信号,采样频率为128 kHz,频谱分析采用线性平均方式,加窗类型为汉宁窗,平均时长为8 s,将宽频带声压级的测量结果折算到距运载器1 m 处计算不同方位角运载器的声源级。运载器旋转方位角的功率谱如图5所示。由图5可见,运载器500 Hz以下低频部分的声压级随方位角变化,从0°开始声压级呈变弱趋势至180°为最弱,再到360°又逐渐增强。此规律是符合运载器尾部螺旋桨辐射噪声远离或靠近接收水听器的旋转状态。而在高频22.5 kHz附近出现频域峰值,但声压级稳定,与方位角没有关系。图6 给出了运载器2次旋转测量实验全频带指向性曲线的均值,加粗实线为平滑平均后的指向性结果,曲线基本对称,不完全对称是与转台在水下受螺旋桨运转推力的作用,不能完全保证转台匀速旋转有关。 图5 不同方向上蛙人运载器辐射噪声的功率谱Fig.5 Noise power spectrums radiated by the frogman vehicle in different directions 图6 蛙人运载器辐射噪声的指向性曲线Fig.6 The directivity curve of the radiation noise of frogman vehicle 因此运载器辐射噪声在低频部分是有指向性差异的,正对螺旋桨方向的声压级最大,而头部方向的声压级最小。实际应用中海上蛙人运载器是呈攻击状态的,即运载器头部朝着水听器行进,运载器的声源级在实际计算中是偏小的。 根据运载器线谱频率特征海上测量实验,图3中运载器起始点B距接收点A约500 m,以工况一、工况二和工况三在A、B两点间依次往返。截取每次航行数据中有效且平稳的时长为10 s的信号做频域特征分析。其中0~10 s内的信号是运载器在工况一的航行数据,10~20 s 内的信号是运载器在工况二的航行数据,20~30 s 内的信号是运载器在工况三的航行数据,各阵元采集的信号连续且稳定。 频域LOFAR 谱分析时间窗1 s,重叠长度为0.5 s,在如图7所示运载器低频部分(2000 Hz以下)的LOFAR谱中,频域特征可视为一段宽频段信号,带宽起始频率为150 Hz,截止频率随着推进器载荷增加。在如图8所示运载器高频部分(22~23.5 kHz)有明显的线谱特征,相同航速下相邻两线谱间的差值是恒定的,试验中3种航速下相邻两线谱间的差值依次为82、97、122 Hz,这里数值的差异即可反映出运载器不同推进载荷航速下的频域特征差异。 图7 不同工况下不同时段辐射噪声低频部分的LOFAR谱Fig.7 The LOFAR spectrums of the radiation noise at low frequencies in different time intervals under different working conditions 图8 不同工况下不同时段辐射噪声高频部分的LOFAR谱Fig.8 The LOFAR spectrums of the radiation noise at high frequencies in different time intervals under different working conditions 对所截取的频率为22~23.5 kHz 的高频段信号进行DEMON谱分析,采用平方法的解调方式,谱分析时间窗长为1 s,重叠长度为0.5 s,试验中三种航速下运载器DEMON 谱分析结果如图9所示。结合能量原理对DEMON谱进行基于背景噪声的修正,工况一和工况二线谱特征明显,可以区分出轴频和叶频及其谐波簇。三种航速下的轴频和叶频谱线值如表2所示。工况一的轴频值28 Hz,叶频及其四次谐波簇的值依次为82、164、246和410 Hz;工况二的轴频值为33 Hz,叶频及其四次谐波簇的值依次为97、195、291 和388 Hz;工况三的轴频约为42 Hz,叶频及其二次谐波簇的值依次为117、234 Hz,结合图4(c)中工况三的频域连续谱升高,逐渐淹没了22~23.5 kHz 带宽内的线谱,因此DEMON谱中的线谱信噪比较弱。通过叶频和轴频的比可以推算螺旋桨叶片数,三种航速下叶频和轴频的比依次为2.92、2.93、2.78,四舍五入取整,数值为3,符合运载器螺旋桨的三叶桨结构。 表2 不同工况下辐射噪声的轴频、叶频谱线值统计表Table 2 Statistical table of spectrum line values of the radiation noise at axial frequencies and blade frequencies under different working conditions 图9 不同工况下不同时段辐射噪声高频部分的DEMON谱Fig.9 The DEMON spectrums of the radiation noise at high frequencies in different time intervals under different working conditions 本文针对某型蛙人水下运载器的辐射噪声特性进行了实验测试和分析研究。从测试分析结果可以看出,该蛙人运载器的辐射噪声能量主要集中在低频150 Hz~1 kHz 和高频22~23.5 kHz 部分,工况四的声源级达到了约130 dB,声源相对较高,不利于蛙人保持隐蔽,且续航能力较差。综合测量结果表明,工况二适合于本型运载器长时间的水下作业。运载器辐射噪声在低频部分是有指向性差异的,正对螺旋桨方向的声压级最大,而头部方向的声压级最小。在实际应用中,海上蛙人运载器呈攻击状态,即运载器头部朝着水听器行进,运载器的声源级在实际计算中偏小。运载器螺旋桨特征反映在功率谱的高频部分,其特征是一系列相同间隔的线谱。线谱的间隔可反映螺旋桨的转速,该间隔与DEMON谱中螺旋桨叶频数值一致。在DEMON谱中可看到明显的轴频、叶频和各次谐波簇,螺旋桨转速增大,轴频和叶频随之增大。叶频和轴频的比基本固定,其值为螺旋桨桨叶数,与文中实验验证结果一致。 本文的研究结果为蛙人运载器的实际应用、蛙人运载器的探测定位和目标识别提供了典型特征依据。同时,也为蛙人运载器的设计提供了参考,运载器必须考虑有效的减振降噪措施,以提升蛙人水下隐身能力。


3 实验测量结果分析
3.1 声源级测量结果

3.2 指向性分析


3.3 频域特征分析


4 结论
猜你喜欢
小哥白尼(军事科学)(2022年5期)2022-08-17
舰船科学技术(2022年10期)2022-06-17
电声技术(2022年3期)2022-04-28
应用科技(2020年1期)2020-06-18
应用声学(2020年2期)2020-06-08
小哥白尼(军事科学)(2019年9期)2019-12-21
舰船科学技术(2015年8期)2015-02-27
声学技术(2014年1期)2014-06-21
舰船科学技术(2014年5期)2014-03-08
机械与电子(2014年3期)2014-02-28