结构因素对遥感天线跟踪精度影响分析及对策
2024-02-21 11:15乔建江王宝宝张少辉于卫东
无线电通信技术 2024年1期
乔建江,王宝宝,张 冰,张少辉,于卫东
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;2.航天系统部装备部军事代表局驻石家庄地区军事代表室,河北 石家庄 050081)
0 引言
随着遥感技术的进步,国内外遥感卫星数据传输逐渐由传统X频段向Ka频段海量数据传输转变[1]。Ka频段大口径遥感卫星地面接收站的天线半功率波束宽度很窄,低轨道卫星相对地面接收站天线而言运动速率快,对于地面站天线跟踪Ka频段低轨道卫星的要求变得越来越高。在Ka频段卫星地面站中,跟踪精度是天线伺服控制系统的关键技术指标[2-4],该指标最能够反映遥感系统整体跟踪性能。影响Ka频段遥感地面站天线跟踪精度的因素很多,主要有结构机械结构的谐振频率、摩擦等[2-3]。其中机械结构谐振频率对天线伺服跟踪带宽、跟踪动态特性和跟踪精度影响很大,甚至导致天线跟踪失败;摩擦对天线跟踪随机误差影响也很大,最坏可导致天线随机误差指标严重超标。所以在工程应用中,需要根据实际情况对影响跟踪精度的各种因素进行分析,根据不同情况采用不同方法提高伺服跟踪精度,满足系统技术指标要求。
随着天线跟踪精度不断提高,传统比例-积分-微分(Proportional-Integral-Derivative,PID)控制技术很难满足伺服控制精度需求。近些年,研究人员提出了变积分PID[5]、复合控制[6]、变积分PID与计算机辅助跟踪结合[7]、利用正割补偿实现高仰角动态滞后补偿[8]和积分式PID[9]等方法,这些方法虽然提升了天线跟踪精度,但是对天线结构因素影响缺少分析,大多是伺服控制算法本身的改进。
针对天线结构因素对跟踪精度的影响,本文以某遥感地面站天线设备Ka频段高精度跟踪为应用背景,分析了机械结构谐振频率、摩擦等结构因素对遥感地面站天线设备跟踪精度的影响,给出了对应的解决措施,并且针对机械结构谐振频率较低对伺服跟踪动态性能的影响,提出了一种数字复合控制融合新型结构滤波器(数字凹口滤波器+一阶惯性环节)的动态跟踪控制方法,等效提高了伺服带宽,抑制了天线机械结构谐振,保证了Ka频段天线窄波束、高精度的稳定过顶跟踪。
1 结构因素对伺服动态性能的影响
1.1 结构谐振频率的影响
遥感地面站天线设备中,天线跟踪精度主要受伺服动态性能影响,而伺服动态性能又由伺服带宽决定。虽然在小口径天线系统中,天线结构谐振频率一般远远落在伺服带宽以外,对伺服系统影响很小,但是对于大口径天线来说,机械结构因素中结构谐振频率对伺服带宽影响甚大。天线刚度越大,转动惯量越小,机械结构谐振频率越高。
实际工程中,根据已建成的许多天线结构的基频数据统计,可由式(1)完成结构谐振频率的快速估算[10-11]:
fL=20.0D-0.7,
(1)
式中:fL为机械结构谐振频率,单位Hz;D为天线口径,单位m。
影响天线机械结构谐振频率的主要因素有天线驱动链刚度和天线转动惯量,更加精确的天线结构谐振频率估算一般有如下公式[12]:
(2)
式中:fL为机械结构谐振频率,单位Hz;K为天线驱动链刚度,单位N·m/rad;J为天线转动惯量,单位kg·m2。
天线机械结构谐振频率的降低会对天线动态跟踪稳定性能产生影响,导致天线跟踪抖动,甚至发生天线机械结构谐振。
图1(a)所示结构谐振频率如果出现在伺服带宽之外,只是影响伺服特性高频段,对伺服动态特性影响很小。如果天线转动惯量大、驱动链结构刚度较小,天线机械结构谐振频率点位于伺服环路特性曲线的中频区,如图1(b)所示,结构谐振频率对伺服动态性能影响比较大,甚至导致伺服系统环路振荡。
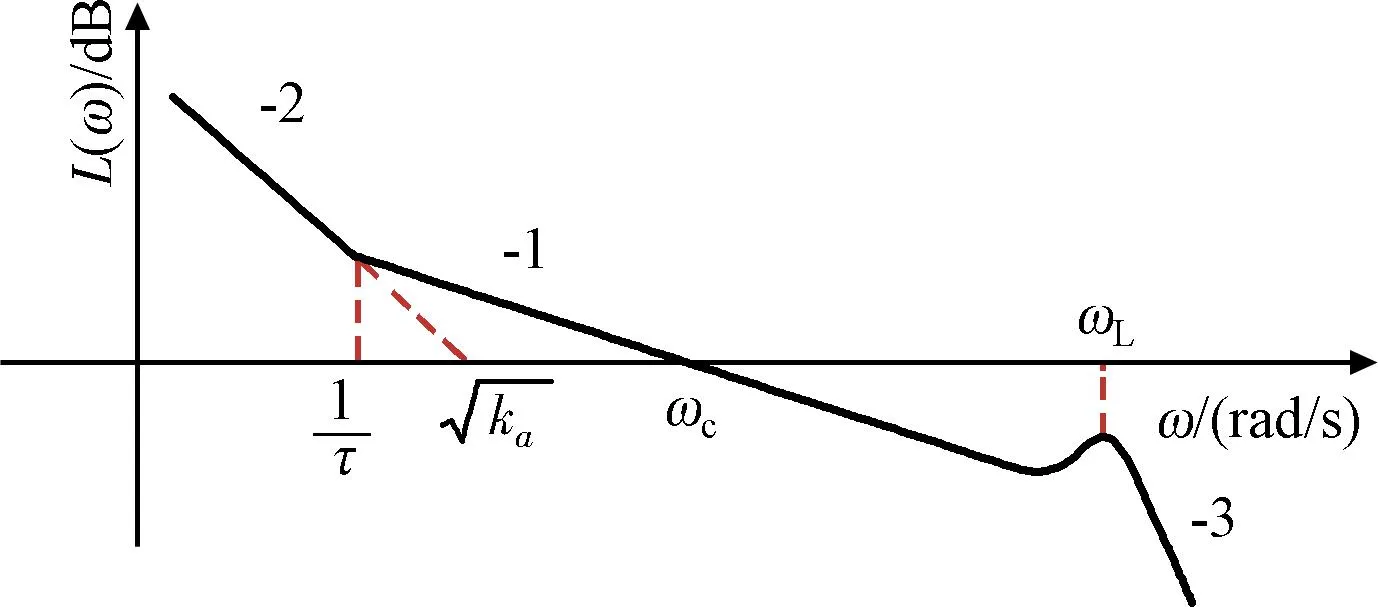
(a) 稳定
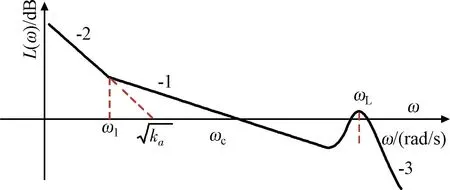
(b) 不稳定
由式(2)可知,在相同结构谐振频率情况下,增加天线结构驱动链刚度,天线结构转动惯量一定会增加;同样,减少天线结构的转动惯量,天线刚度也一定会降低。由此可见,在实际大口径天线工程设计中,很难将天线结构刚度和天线转动惯量都设计成最佳值,结构谐振频率也不易设计得很高。对于大口径天线系统来说,伺服带宽和稳定裕度主要受结构谐振频率和阻尼系数的影响。工程设计时,天线伺服带宽一般应用计算如下[2]:
ωB=2×ξL×ωL,
(3)
式中:ωB为伺服带宽,单位rad;ξL为机械阻尼系数,一般取0.1~0.3;ωL为机械结构谐振频率,单位rad。
由式(3)可以看出伺服带宽不但和机械结构谐振频率有关,还和天线座机械阻尼系数有关,但是一般提高机械阻尼系数比较困难。
为保证伺服系统具有良好的动态性能,一般伺服系统要求[2-3]相位裕度γ≥π/4,幅值裕度G≥6 dB。机械结构谐振频率直接影响伺服环路带宽,从而影响伺服系统动态跟踪性能和跟踪精度,现代伺服设计普遍采用计算机控制,一些非线性因素得到了很大的抑制,同等结构谐振频率情况下,伺服带宽可以提高一些,达到结构谐振频率的1/4~1/3[2]。
工程上,遥感地面站伺服控制系统一般都设计为二阶无静差系统,伺服动态滞后误差是伺服跟踪误差的主要误差源[2-4],该项误差主要是伺服加速度引起的动态滞后[5-7]:
(4)
式中:Δe1为动态滞后误差,单位(°);为保精度最大角加速度,单位(°)/s2;Emax为保精度角加速度产生时的最大仰角,单位(°);ka为加速度增益常数,单位rad/s2。加速度增益常数ka受伺服带宽制约,一般二型系统中[2]:
(5)
式中:βn为伺服噪声带宽,单位Hz。在大多数工程中,天线机械结构谐振频率不能进一步提高的情况下,可以在伺服系统环路设计上采取措施,抑制天线机械结构谐振频率的峰值。
1.2 摩擦的影响
对于Ka频段高精度天线伺服控制系统,摩擦环节的存在对提高伺服动态性能影响很大。在天线转动惯量固定不变的情况下,天线摩擦力矩基本上是常量,伺服系统输出有较大静误差[12],天线跟踪随机误差比较大,尤其是在跟踪较低速度加速度目标时,跟踪误差角很小,电机输出的力矩无法克服摩擦力矩的影响,导致伺服传动系统不能顺利启动,产生了一个±ε(t)范围内的不灵敏区(死区),如图2所示。
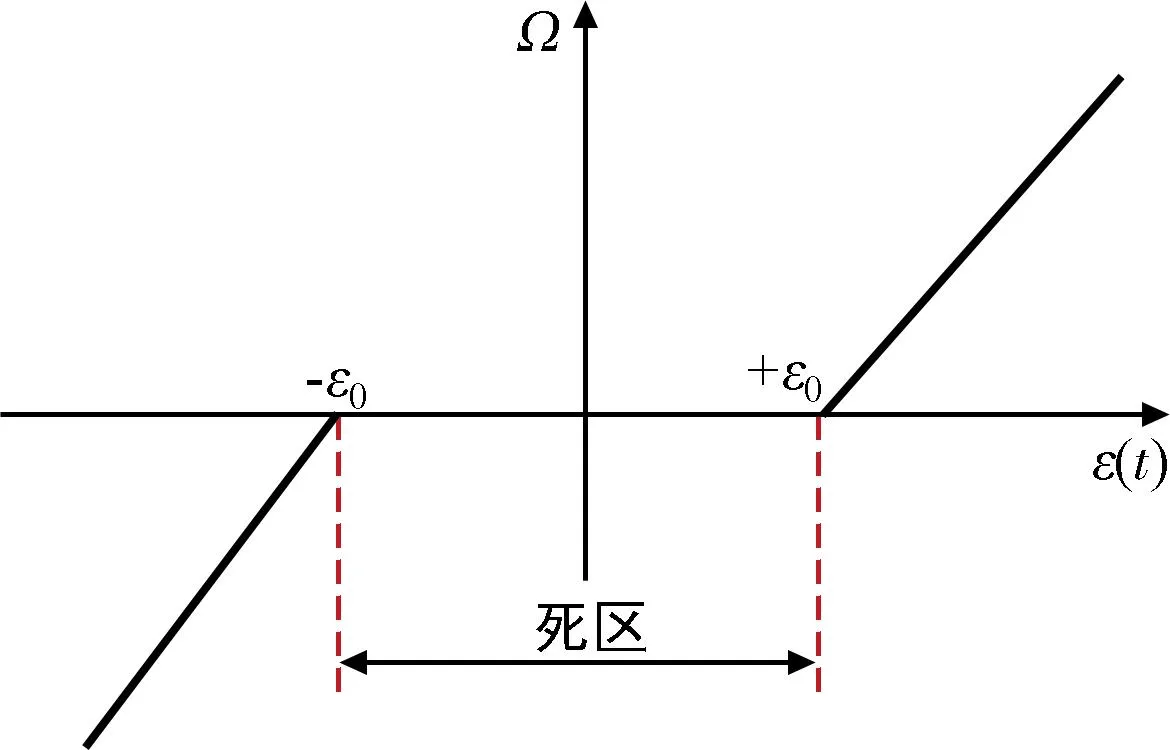
图2 摩擦引起的死区模型Fig.2 Dead zone caused by friction model
这个死区经常导致伺服控制系统出现不均匀的跳动或爬行现象,进而产生低速跟踪不平稳误差[12-13]。工程上,要求高精度天线传动系统的摩擦力矩Mf小于伺服电机额定输出力矩Mm的10%[13]。
Mf=0.1×Mm。
(6)
系统结构摩擦力矩分为静态摩擦力矩MFS、库伦摩擦力矩MF1和速度摩擦力矩MF2等[14]。
Mf=MFS+MF1+MF2。
(7)
天线反射体的质量和驱动链摩擦系数是影响摩擦力矩的主要因素,在天线驱动链没有发生变化时,它的摩擦系数保持恒定。摩擦力矩影响伺服系统截止频率,在天线转动惯量一定的情况下,伺服系统截止频率与摩擦力矩的平方根成正比。摩擦力矩还影响伺服低速跟踪角速度大小,在低速状态,库伦摩擦增加时,影响伺服低速运行稳定性,导致跟踪随机误差增大。
天线低速性能取决于天线摩擦、刚度以及调速范围等因素,在工程上,一般在天线设计时可采用全数字电机控制器和驱动器,利用数字总线进行命令传输,提高信号传输抗干扰能力并减小伺服误差和零漂;通过数字码盘反馈替代模拟测速机,提高电机测速反馈信号线性度和分辨率;采用低速大力矩电机,满足天线伺服系统低速时,电机力矩可以比较容易地克服天线摩擦力矩,保证伺服系统低速运行平稳,减小伺服系统跟踪随机误差。
2 融合结构滤波器的跟踪控制方法
本文提出了一种数字复合控制融合数字凹口滤波器+一阶惯性环节的动态跟踪控制方法,等效提高了天线结构阻尼系数、伺服带宽及伺服稳定裕度,减小了伺服动态滞后误差,提高了伺服动态跟踪精度。
2.1 数字凹口滤波器
在中大口径天线跟踪控制系统中经常出现机械结构谐振频率较低,伺服带宽不够高,影响伺服动态跟踪稳定的问题。为了保证伺服控制系统的稳定性,必须要求系统幅值裕度不小于6 dB[15],但大口径天线机械谐振阻尼很小[16],谐振频率峰值又很大,设计较高带宽的伺服比较困难,于是引入凹口滤波器网络[16-17]来抑制天线结构谐振的影响,保证伺服控制系统稳定。
伺服环路中所采用的凹口滤波器传递函数如下所示[15,17]:
(8)
式中:ξ2=10ξ1,1/T点和天线座机械结构谐振峰值的地方完全对准。二阶微分环节T2S2+2ξ1TS+1和二阶振荡环节1/(T2S2+2ξ1TS+1)在1/T点前后二者幅度、相位完全对消,而在1/T处即天线座机械结构谐振峰值的地方形成一个凹口,这样就有效减小了天线结构谐振的峰值,等效增加了天线结构阻尼系数。
对式(8)进行变换,如式(9)所示:
(9)
在软件设计中需要对凹口滤波器算法进行离散化,数字离散化通过双线性变换实现,然后编程处理。采用双线性变换法离散化,则:
(10)

可以得到差分方程为:
(11)
2.2 前馈控制融合结构滤波器的跟踪控制算法
针对Ka频段中大口径天线大动态、窄波束稳定跟踪需求,为使伺服控制系统满足一定的动态跟踪和静态跟踪要求,在伺服控制系统设计时采用数字前馈控制来提高伺服控制系统无静差度,使伺服控制系统从一阶无静差系统提高到二阶无静差系统[18-19],等效提高了伺服带宽,大大降低了伺服动态滞后误差。伺服控制器传递函数为G1(S),前馈控制的传递函数为G2(S),此时伺服控制系统的原理图如图3所示[18-19]。
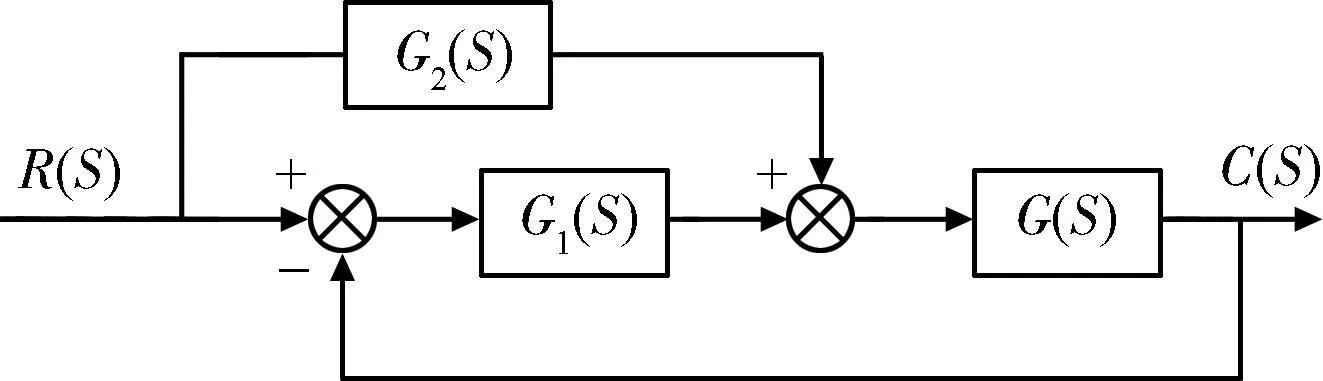
图3 前馈控制原理图Fig.3 Schematic block diagram of feedforward control
文献[20]提出了针对正割补偿的优化算法,降低了伺服动态跟踪特性,减小了天线振荡,但是这种方法在速度较快目标过顶时依然有较大的动态滞后误差。根据天线系统结构谐振较低、天线工作易不稳定的问题,本文提出了一种新型的结构滤波器,这种滤波器不同于传统单独凹口滤波器设计,而是采用组合两个凹口滤波器(如图4)+一阶惯性环节的滤波器,克服了单个滤波器在天线结构谐振频率发生变化时无法抵消抑制的问题。融合新型结构滤波器的复合控制原理框图如5所示,虚线框中绿色部分为新型结构滤波器。
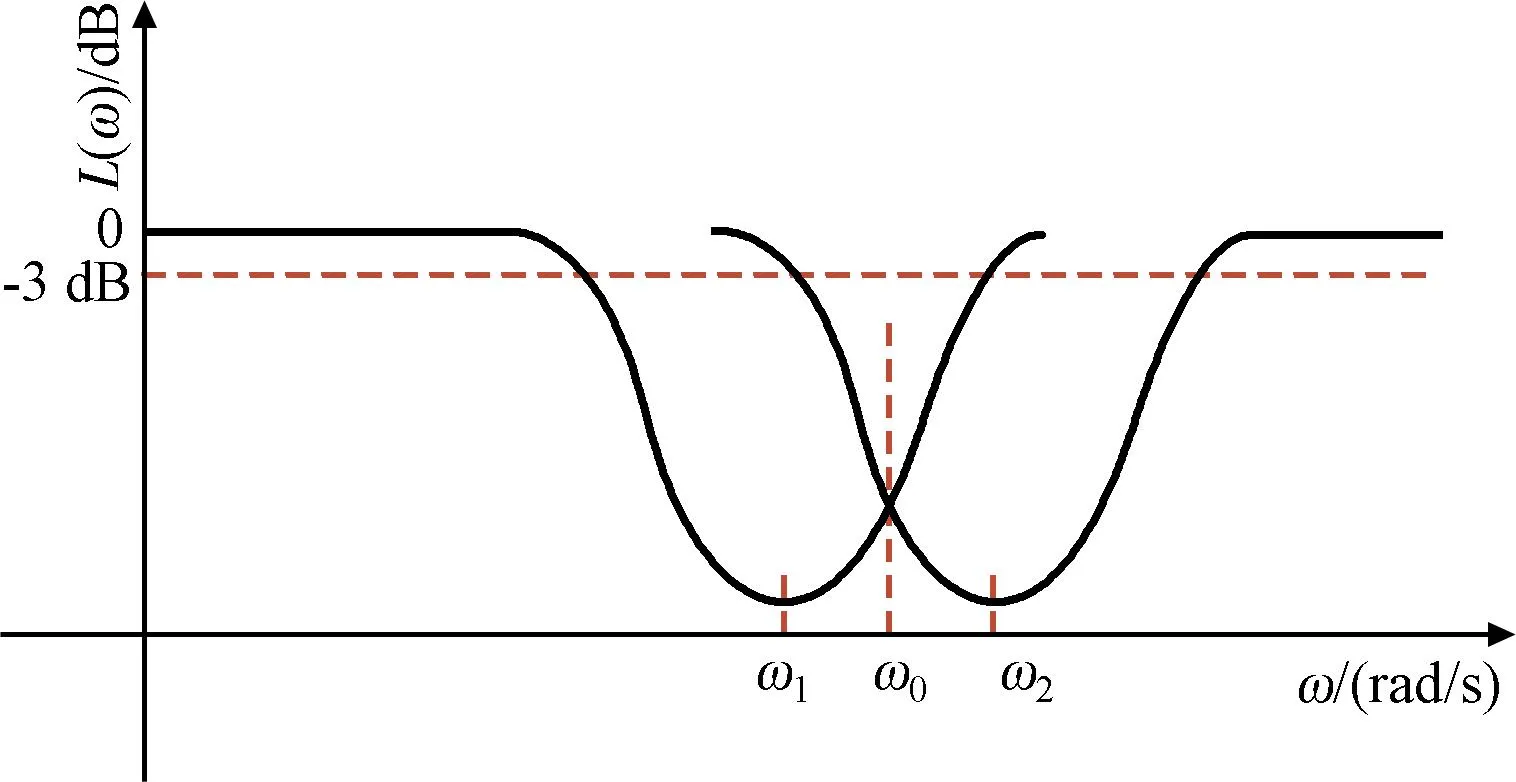
图4 两个凹口滤波器波特图示意Fig.4 Bode curves of two digital notch filters

图5 融合新型结构滤波器的复合控制原理框图Fig.5 Principle block diagram of composite control for fusion structural filter
(12)
G3(S)滤波器传递函数如式(13)所示:
(13)
式中:
(14)
(15)
ξ2=10ξ1。
(16)
G4(S)为一阶低通滤波器的传递函数:
(17)
在速度环增加了数字凹口滤波器(式(12))和一阶惯性环节(式(17))来抑制谐振,同时一阶惯性环节作为低通滤波器,具备滤高通低功能,可以滤除信号中的高次谐波,改善了伺服系统的特性,预防伺服系统发生结构谐振,等效提高了伺服系统带宽[16],改变了伺服系统环路幅频特性的斜率,压低了伺服系统的谐振峰值,增加了伺服系统的幅度裕度,改善了系统动态特性品质。因此当输入偏差变化率很大时,可以有效控制伺服系统的输出,起到了调节系统品质的作用。
3 工程应用及测试结果
3.1 新型结构滤波器应用结果
图6为某方位-俯仰-第三轴型12 m天线伺服控制系统的位置环阶跃响应测试结果。
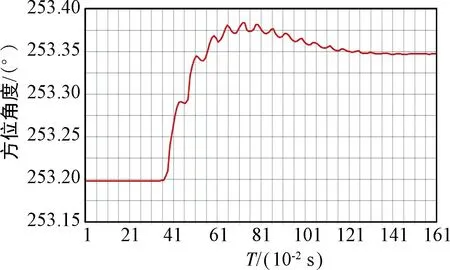
图6 未加新型数字结构滤波器器的方位位置环阶跃曲线Fig.6 Step curce of azimuth position loop without new digital tructural filter
从图6可以明显看出,天线阶跃测试曲线中叠加了谐振频率为3.6 Hz的波形,引起了天线的振荡,天线稳定时间增加,工作不稳定。在伺服速度环中引入新型结构滤波器即增加两个谐振频率为f1=3.4 Hz和f2=3.8 Hz的滤波器,分别布置在结构谐振频率的两侧,这样设计的凹口滤波器有一定深度和宽度,滤波器中心频率位于3.6 Hz,完美抑制了天线结构谐振频率的影响,实现了天线稳定工作,如图7所示。
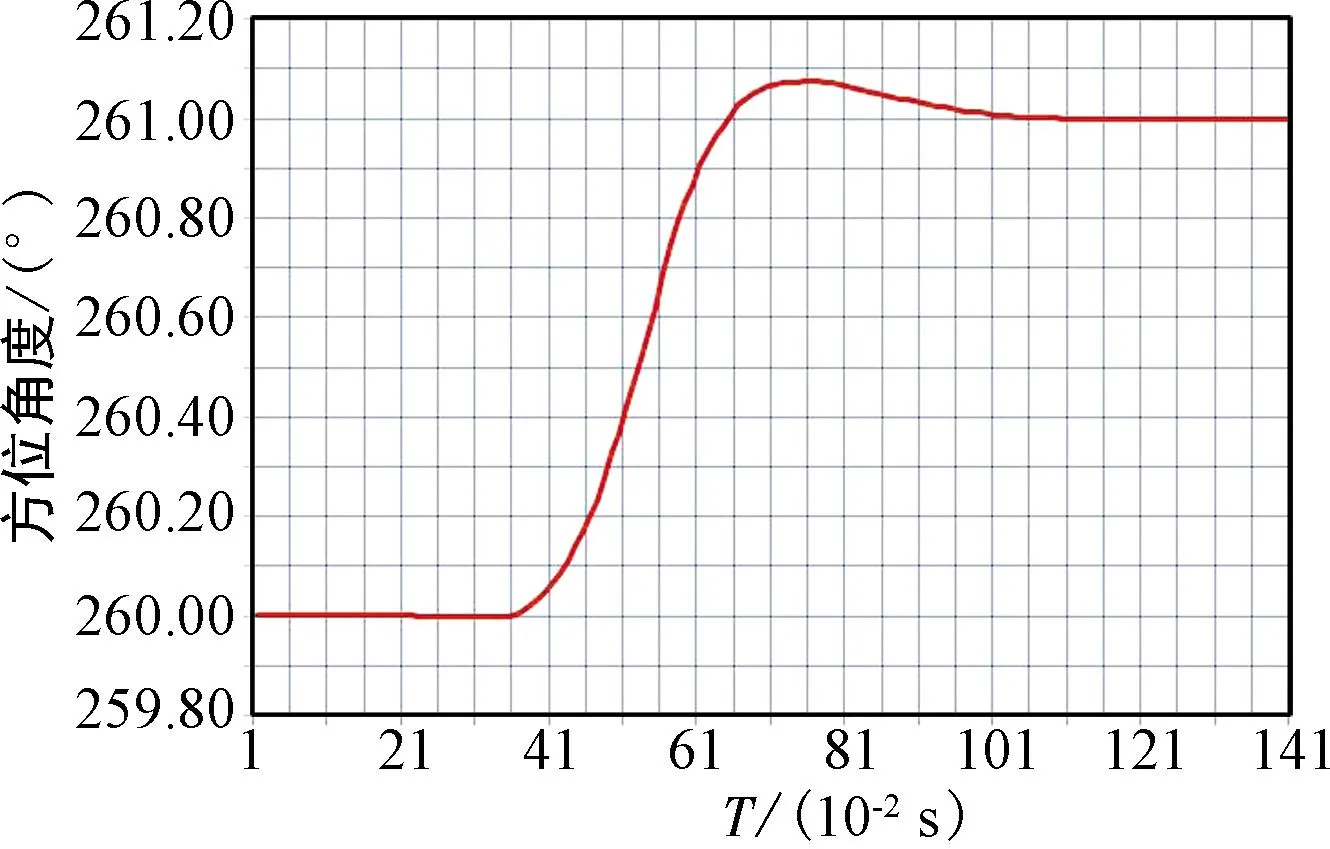
图7 加新型数字结构滤波器的方位位置环阶跃曲线Fig.7 Step curce of azimuth position loop with new digital tructural filter
3.2 低速性能测试结果
图8为某方位-俯仰-第三轴型12 m天线伺服系统低速性能测试结果。
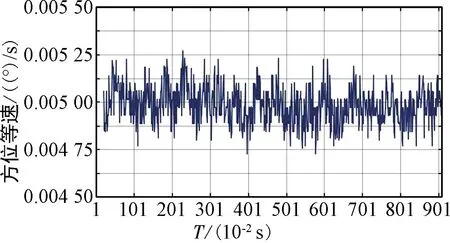
(a) 低速运行曲线(命令值:0.005 (°)/s)
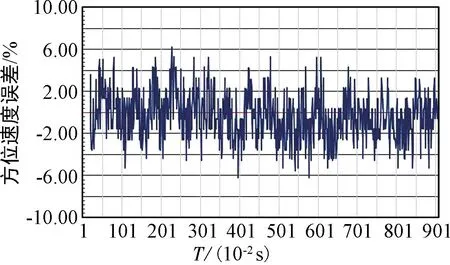
(b) 低速运行误差曲线
从图8可以看出,本天线系统采用低速设计技术措施后,天线伺服低速性能和伺服调速比大大提高,天线最低平稳运行速度优于0.005 (°)/s。低速运行过程中,速度误差均在10%以下,天线运行连续、平稳、无“爬行”现象。
3.3 跟踪测试结果分析
某方位-俯仰-第三轴型12 m天线利用Ka频段低轨道卫星动态目标模拟数据(卫星轨道高度600 km,对于三轴天线最大角加速度为0.393 (°)/s2,最大角速度5.85 (°)/s,采用方位、俯仰轴保持单脉冲自跟踪,同时驱动天线第三轴运动的方式跟踪信标塔Ka频段信标,以动态方式模拟Ka频段跟踪的方法[21]来测试验证跟踪系统的动态跟踪性能,测试结果如图9所示。
测试结果表明:第三轴模拟加速度在0.393 (°)/s2时,方位动态跟踪均方根误差优于0.006 2°,满足Ka频段1/10半功率波瓣宽度的跟踪精度指标要求。Ka频段遥感地面站天线系统动态跟踪性能测试结果和设计指标基本吻合,实际跟踪测试结果验证了新型结构滤波器对12 m三轴遥感接收天线机械结构谐振抑制的有效性。
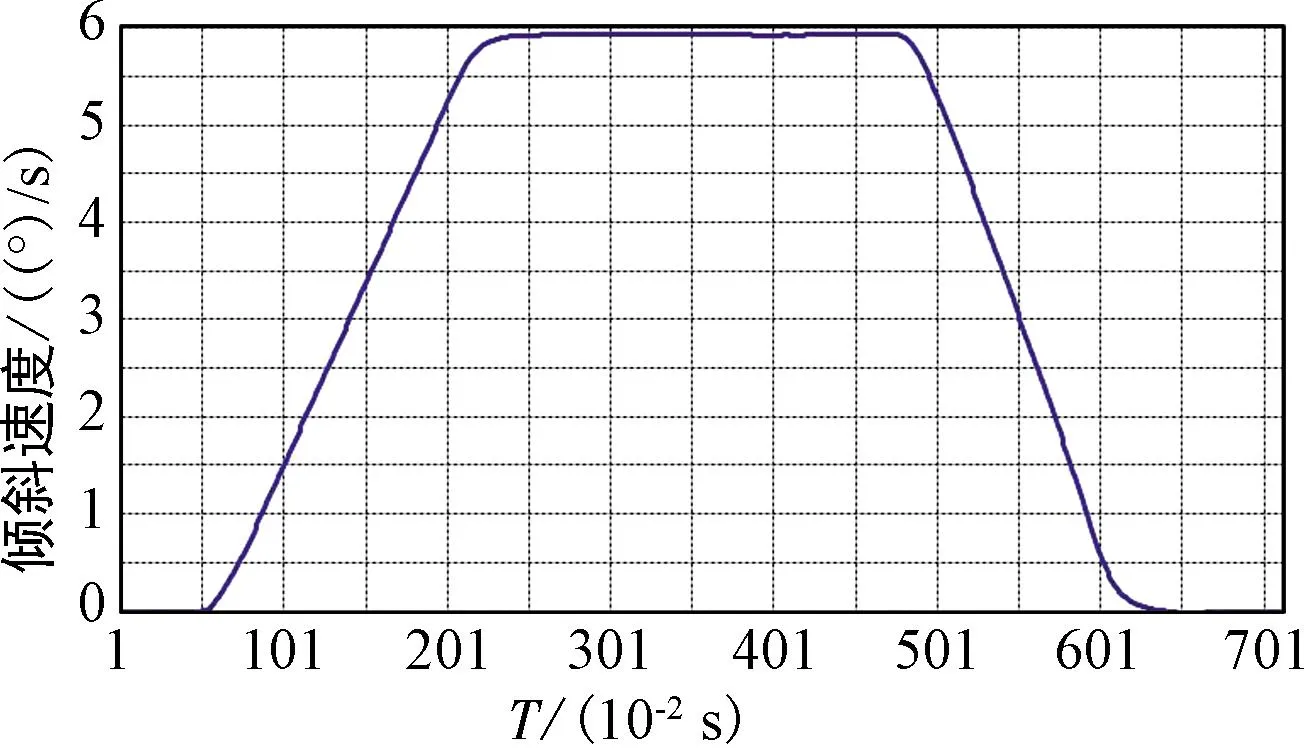
(a) 第三轴运动倾斜速度曲线
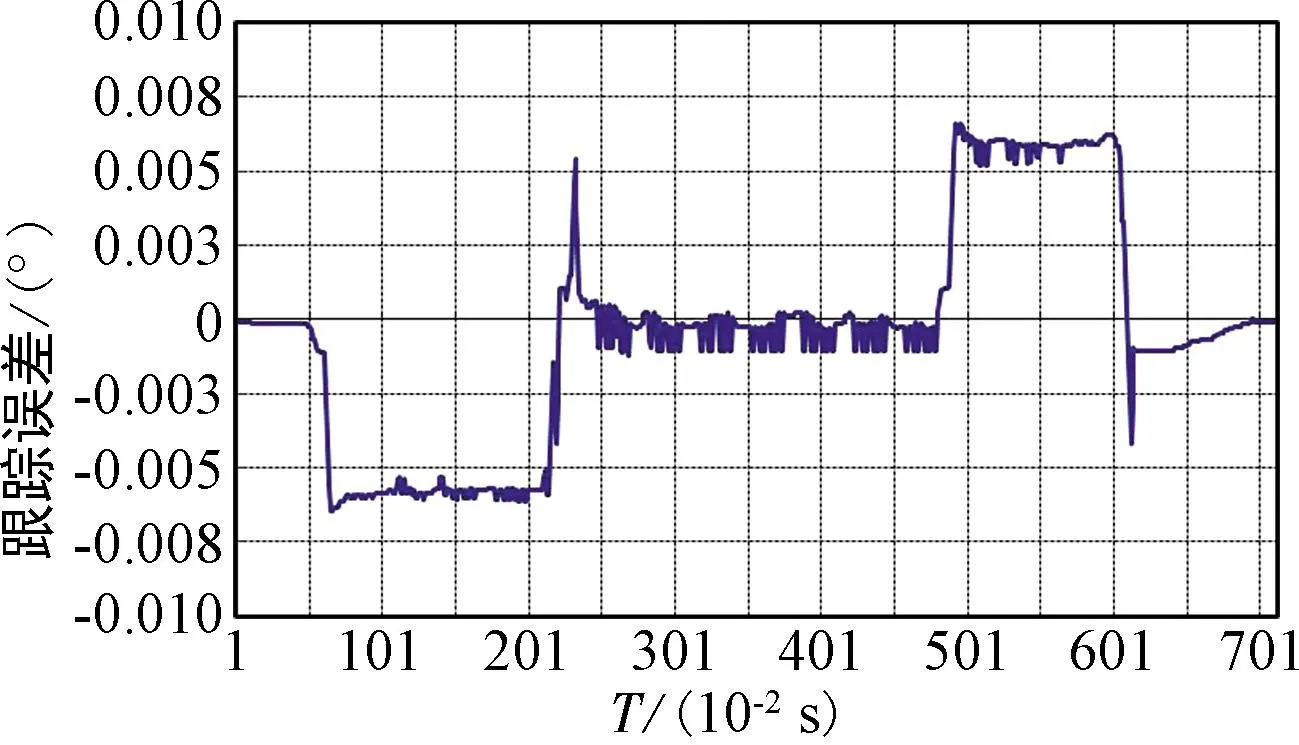
(c) 方位跟踪误差曲线
4 结束语
在Ka频段卫星数据接收站中,结构因素对天线跟踪精度影响很大。当天线跟踪速度和加速度较大时,天线机械结构谐振频率成为主要影响因素,影响伺服动态滞后误差;而当天线跟踪低速运动的目标时,摩擦力矩成为影响跟踪随机误差的一个关键因素,影响伺服低速跟踪平稳性,加大系统跟踪随机误差。在12 m口径天线设计中,为进一步提高伺服跟踪精度,在系统跟踪环路设计时采用了数字前馈控制融合新型结构滤波器(数字凹口滤波器+一阶惯性环节)的跟踪控制技术措施,改善了伺服控制系统的动态跟踪性能,等效提高了伺服带宽,提高了系统跟踪精度。研究内容紧密结合工程实际,对于Ka频段三轴斜台座架过顶跟踪伺服控制系统的设计具有理论指导意义。
猜你喜欢
导弹与航天运载技术(2023年5期)2023-12-17
北京航空航天大学学报(2022年6期)2022-07-02
测控技术(2018年12期)2018-11-25
喜剧世界(2017年5期)2017-12-06
红蜻蜓·低年级(2017年2期)2017-03-29
喜剧世界(2016年3期)2016-11-26
西南交通大学学报(2016年3期)2016-06-15
通信电源技术(2016年4期)2016-04-04
北京航空航天大学学报(2016年4期)2016-02-27
弹箭与制导学报(2015年1期)2015-03-11