
地基BDS/GNSS水汽监测在水利领域的研究进展与展望
2024-02-28 08:40孙铭涵庞治国吕娟张朋杰崔香蕊
全球定位系统 2024年1期
孙铭涵,庞治国,2,吕娟,2,张朋杰,崔香蕊
( 1. 中国水利水电科学研究院, 北京 100038;2. 水利部防洪抗旱减灾工程技术研究中心, 北京 100038 )
0 引言
水汽是大气中的水蒸气,不仅是大气最重要的组成成分,而且在水文循环过程中起着关键性作用. 水汽不仅可以吸收和辐射部分的太阳辐射,在一定程度上稳定地球温度变化,而且还可以在大气中通过形态变化来影响天气、气候的变化. 水汽含量变化与分布极其复杂,在监测中通常用大气可降水量(precipitable water vapor, PWV)来衡量大气水汽含量,即单位面积的空气柱中水汽全部凝结所能形成的降水量[1]. PWV只反映可能产生的降水量,而不能代表实际降水量.研究表明,PWV与实际降水量之间存在显著的关联性,可以利用PWV含量与分布对降水进行预测. 而在水利领域中,降水是一个重要的气象参数,故而,水汽监测在众多水利应用中具有重要的意义,比如水循环利用与管理、气候变化监测、干旱监测、暴雨监测等领域,以及提高防灾减灾能力等方面. 因此,获得高精度的PWV数据是研究其与降水两者之间关系,进行降水预测、服务水利应用的重要数据基础[2].
针对如何获取PWV数据的研究已有近百年的历史,随着科技与认知的不断进步,其获取方法逐渐呈现多元化的特征. 目前,常用的传统获取水汽数据的方法有无线电探空仪、微波辐射计、中分辨率成像光谱仪(moderate-resolution imaging spectroradiometer,MODIS)、数值同化再分析资料等[3]. 这些方法因其使用仪器的局限性多表现出价格昂贵、时空分辨率较低、易受外界因素影响、数据滞后等缺点,难以满足天气预报、灾害监测对水汽探测高时空分辨率、高精度的需求. 2020年7月31日,北斗三号(BeiDou-3 Navigation Satellite System, BDS-3)正式宣布建成与开通,形成了美国的GPS、欧洲的Galileo、俄罗斯的GLONASS和中国的BDS四大GNSS并存且提供运营服务的格局,极大程度上丰富了卫星导航信号资源,使GNSS服务功能、范围、能力得到了加强. GNSS水汽反演也逐渐成为一种新兴的水汽探测的手段,同时也为传统水汽探测带来了突破. GNSS水汽反演技术可以实现全天时、全天候、近实时的水汽探测,具有高精度、高时空分辨率、成本低、适用性强等优势,与传统探测手段之间可形成优势互补,为PWV含量及分布的监测和降水短临预报等应用提供了良好地数据支持,在水汽监测中的地位也日益凸显.
在中国知网和Web of Science利用主题词“BDS/GNSS PWV”进行文献检索,结果如图1所示. 2000—2022年间发表相关文献数量呈现逐年递增趋势,国内开展研究略晚于国外,但基于中国特有的BDS发展迅猛,对于PWV监测的研究迅速获得广大学者的关注,近年来中文文献发文量趋于稳定. 目前,国内外GNSS PWV相关的研究论文多侧重方法改进、精度提升和应用方面,而关于BDS/GNSS PWV监测发展历程、方法、应用与发展的综述类论文成果较少,侧重水利领域的研究和应用更是少之又少.

图1 2000—2022年BDS/GNSS PWV研究发文量年际变化
在水利领域中,降水量是气候变化监测的重要指标,对农田水利、河湖库塘管理、防洪抗旱、水利工程建设等方面都具有重要的指导意义. 随着对BDS/GNSS PWV反演研究的深入,各种水汽数据的公开,BDS/GNSS PWV反演方法不断得到改进,反演精度得到大幅提升,并在众多领域中得到验证. 本文旨在为相关研究人员对BDS/GNSS PWV研究进展、方法和水利领域的应用形成系统的了解和认识. 主要介绍了地基BDS/GNSS水汽监测,以及GNSS水汽数据融合的研究进展与发展趋势;阐明了BDS/GNSS PWV反演原理、方法与研究方向;对其在改进数值天气预报的高精度水汽反演、降水短临预报、气候变化监测等方面的应用进行了研究,总结归纳出地基BDS/GNSS水汽监测在水利领域中的应用与发展方向.
1 BDS/GNSS水汽监测
1.1 BDS/GNSS水汽监测
GNSS在发展初期的主旨是为全球范围内的用户提供全天候、高精度的导航定位服务[4],定位精度受到多种因素的影响,主要是电离层延迟、对流层延迟(zenith tropospheric delay, ZTD)和多路径误差等.ZTD误差是定位中重要的误差源之一,主要是大气对GNSS信号产生的折射作用致使接收机无法精确测量接收到的GNSS信号,导致定位精度下降. 在研究如何消除大气延迟干扰的同时发展出利用GNSS导航定位数据反演大气水汽的新技术.
对于GNSS水汽监测的研究最早可以追溯到1987年,文献[5]提出利用ZTD来反演大气水汽含量的方法,为后续的研究奠定了理论基础. 1992年,Bevis在文章中正式提出了基于GPS水汽遥感的原理及方法,掀开了GPS气象学的篇章[6]. 随着我国BDS的全面建成,集成GPS、GLONASS、Galileo和BDS的GNSS观测体系正式形成,为GNSS水汽探测技术的发展提供了空间设施基础. 同时,全球范围内大规模建设连续运行参考站 (continuous operational reference system, CORS) 系统,为GNSS水汽反演提供了必要的地面设施基础,为GNSS水汽反演提供高时空分辨率的数据保障. 自此,GPS气象学也逐渐发展成为GNSS气象学,越来越多的学者对GNSS水汽监测展开研究. 根据接收机所在位置,GNSS气象学可划分为地基GNSS气象学和空基GNSS气象学两种. 地基GNSS气象学主要是依据地面接收机接收到的观测数据,并与地面气象因素相结合获取PWV.空基GNSS气象学主要是在掩星条件下,搭载在低轨卫星上的接收机接收卫星信号,通过应用相关算法获取气象参数,从而来获取PWV. 地基GNSS测站数量多分布广泛、测站位置信息已知,而空基GNSS水汽监测受低轨卫星数量和分布的影响,导致其水汽反演精度相对较低. 故而现如今GNSS水汽监测研究方面占据主要地位的依旧是地基GNSS手段.
地基GNSS水汽探测作为新兴的水汽探测技术,具有成本低廉、高空间分辨率、高精度、全天时、全天候稳定观测的优势,大量研究证明地基GNSS解算PWV具有可行性与稳定性,且四个GNSS获取水汽资料的可行性与准确性是有保障的. 文献[7]基于GPS数据对地中海地区1999年全年的PWV进行反演,并将结果与微波水汽辐射计反演结果进行对比,发现两者之间存在较高的相关性. 文献[8]基于地基GPS数据对全国PWV含量进行反演,与探空数据相比误差在2 mm以内,验证了地基GPS可降水量反演的可行性. GLONASS和Galileo因其数据获取的稳定性和数据精度存在缺陷,故基于单一GLONASS或Galileo进行水汽监测的研究较少. 文献[9]对比了GPS与GLONASS PWV的反演精度,结果表明在GLONASS全面恢复运行后反演结果与GPS反演结果具有较强的一致性,反演精度大幅提高,误差控制在约2 mm,证明了GLONASS在水汽监测中的可行性. 文献[10]研究证明了Galileo在水汽监测中具有较高的反演精度,反演结果与GPS反演结果吻合程度较高. BDS全面建成、投入使用以后,众多学者对验证与提升BDS水汽探测的准确性展开研究. 文献[11]基于北斗试验网的数据展开水汽监测研究,与GPS监测结果误差为2~3.3 mm,证实了BDS在水汽监测中的可行性. 文献[12]验证了BDS-3水汽探测性能,将反演结果分别与北斗二号(BeiDou-2 Navigation Satellite System, BDS-2)反演结果、GPS反演结果进行对比,结果显示BDS-3在PWV反演中的表现明显优于BDS-2,与GPS反演结果基本一致,相关系数均在0.9以上,反演精度得到提升. 文献[13]验证了BDS-2 PWV反演相对误差不稳定,精度较差,BDS-2/BDS-3混合星座使得BDS PWV反演数据稳定性和反演精度得到大幅提升.
单一系统获取水汽数据固然具有较高的精度,但系统空间段、控制段运行、信号传播与接收、抗干扰等方面具有脆弱性,会导致数据获取存在不稳定因素. 而多系统获取GNSS ZTD/PWV观测值相较单一系统数据的获取稳定性更高,多系统GNSS组合可以提供更多、空间构型更加合理的可视卫星,有助于提高ZTD/PWV解算精度. 目前,多系统组合的GNSS水汽监测逐渐发展成为研究热点. 文献[14]将四个GNSS PWV反演结果与探空PWV进行比较,均方根误差(root mean square error,RMSE)均小于3 mm,符合水汽监测应用需求. 文献[15]利用GPS/BDS组合观测值解算ZTD和PWV,与单系统解算结果相比,GPS/BDS双系统表现出更高的稳定性和解算精度.文献[16]发现GPS/GLONASS组合方案可以获得更加准确可靠的水汽数据,与探空数据PWV一致性更高,RMSE在1.5~2.3 mm之间,相比单系统拥有更高的精度和鲁棒性. 文献[17]利用GPS/BDS/GLONASS/Galileo四系统组合观测值进行PWV反演,优化了ZTD初始化时间,改进了ZTD和PWV解算结果,RMSE普遍减少约2 mm,在水汽监测方面比单系统、双系统表现更优. 证实了多系统的GNSS水汽监测的可行性与稳定性,在水汽监测中的应用具有很大的潜力,可为高精度实时的天气预报、降水预报提供更具参考价值的水汽信息.
1.2 BDS/GNSS对流层延迟
基于地基BDS/GNSS反演PWV主要是依据GNSS(GNSS derived,GNSS-D)延迟信号技术[18]. 地面接收机接收卫星发射信号过程中,信号穿越大气层经过电离层和中性层发生折射所造成的时间延迟分别称之为电离层延迟和中性层延迟. 电离层主要由自由电子和正、负离子组成,是一种典型的色散介质,基于此特性,会对GNSS定位过程中的卫星信号产生延迟,利用双频接收机接收卫星信号即可消除电离层延迟.中性层延迟一般发生在对流层,故也可称之为天顶对流层延迟. 因99%的水汽都蕴藏在对流层中,因此估算ZTD是BDS/GNSS水汽反演的关键.
依据ZTD估算方法的不同,地基GNSS水汽监测方法分为双差网解法和非差精密单点定位(precise point positioning,PPP)法. 双差网解法需要引入国际GNSS服务(International GNSS Service, IGS)远距离观测资料利用差分原理来估算ZTD,而非差PPP无需引入远距离测站,测站之间互不相关. 在双差网解法解算ZTD研究方面,文献[19]采用卡尔曼滤波法和双差法求解GNSS ZTD,其结果与IGS观测结果相比,两者的结果误差都在1 mm之内,卡尔曼滤波法可以得到更高的精度,但是其计算过程较繁琐,而双差法计算相较简单,能获得相当的精度,更加适用于实际应用. 文献[20-22]在不同地区利用双差法进行地基GNSS水汽探测,与探空数据相比偏差较小,证实了双差法解算ZTD的准确性. 双差法获得测站间的相对ZTD数据在水汽监测中可以进一步获取高精度的PWV数据,数据产品质量高,但涉及的数学模型相对复杂,在大规模水汽监测中解算过程比较复杂,计算量较大. 在非差PPP解法解算GNSS ZTD研究方面,该方法具有模型简单,测站间互不影响的优势,可以获得测站上空绝对的ZTD. 文献[23]利用PPP技术解算多模GNSS ZTD数据,实现对珠海地区PWV的实时监测,可以准确地反映出BDS PWV变化情况,具有较高的精度,并在“妮妲”台风监测中得到检验. 文献[24]基于PPP和克里金插值法获取了河南省的BDS PWV格网数据,结合降雨数据从时空两个维度分析了2021年河南极端暴雨中PWV变化和强降水之间的相关关系. 证明了PPP法不仅可以获取高精度的实时PWV产品,受环境影响较小,且事后PWV数据产品具有高精度、高时空分辨率的优势,在实时监测与预警预报中发挥重要作用.
水汽变化复杂、具有非平稳特征,难以对其时空变化进行模拟,如何从GNSS ZTD中准确分离出水汽引起的天顶湿延迟(zenith wet delay, ZWD)是GNSS PWV反演的重点. 对流层中造成信号延迟的不仅仅是水汽还有干燥气体,干燥气体引起的天顶静力学延迟(zenith hydrostatic delay, ZHD)变化规律,可以通过模型估计. 通过ZHD模型给定精确的ZHD,然后对ZWD进行估算,进而解算出GNSS PWV,具体流程图如图2所示. ZHD模型主要依赖于地表温度、测站气压等气象因素,常用的实测气象因素经验模型包括Saastamoinen模型[25]、Hopfield模型[26]和Black模型[27]. 在GNSS测站位置和气象数据已知的条件下,可以利用Saastamoinen模型或Hopfield模型计算ZHD;GNSS测站位置未知,气象数据已知的条件下,可以利用Black模型计算ZHD.研究发现三种常用的静力学延迟模型解算结果之间存在的细小的偏差,对最终PWV反演结果的影响较小. 文献[28]对比了三种静力学延迟模型解算得到的ZWD与水汽辐射计得到的ZWD,发现两者之间的总体趋势一致,且Saastamoinen模型解算结果最佳,误差为2.16 mm,证明了经验模型解算GNSS ZHD的可行性与优越性. 文献[29]证明了三种静力学延迟模型解算的PWV几乎一致,平均差值约在1 mm. 文献[30]对全球数据进行分析,结果表明Saastamoinen模型解算结果优于Hopfield模型,解算精度误差达到亚毫米级.
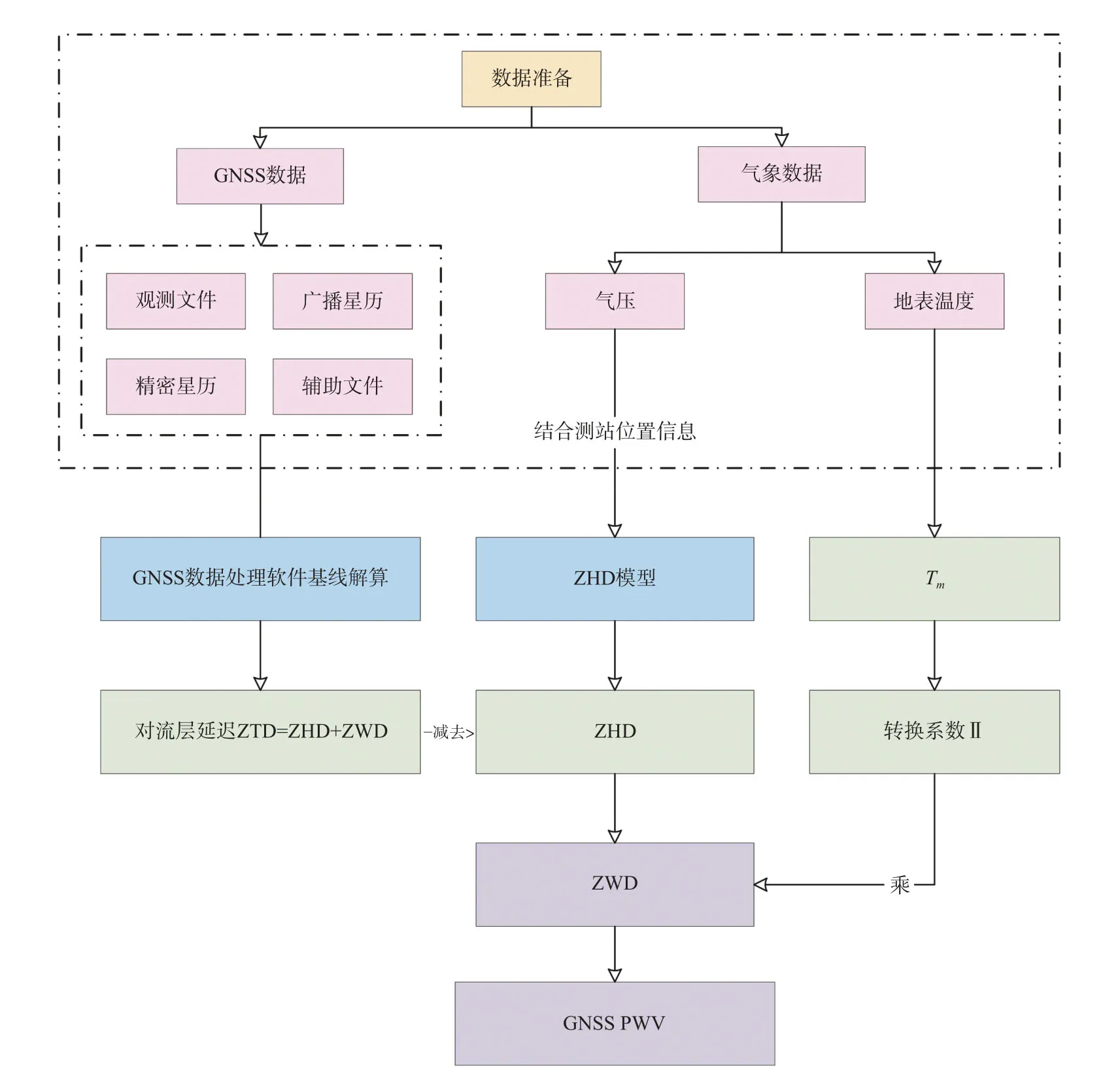
图2 GNSS PWV反演流程
基于实测气象因素的静力学延迟经验模型虽可获取高精度的ZHD,但解算过程需要气象站的实测气象数据,在近实时水汽监测中,气象站实时气象数据获取困难,模型在实时水汽监测中难以发挥作用.随着应用中对实时水汽监测的需求,尤其是极端天气条件下实测气象数据获取困难且对实时水汽监测的需求较高,基于多年实测气象数据建立的无气象参数的ZHD模型应运而生. 与传统基于实测气象数据的经验模型相比,只需要输入经纬度、高程、年积日等参数即可模拟得到相对应时间地点的ZHD数据,实用性较强. 目前较为常用的全球性无气象参数模型包含GPT系列模型[31]、UNB系列模型[32]、EGNOS模型等. 研究表明GPT2模型计算的ZTD值与IGS ZTD数据产品相较误差在7.9 mm,一定程度上反演精度明显优于UNB3模型和EGNOS模型,故而GPT系列模型是现如今最先进的对流层延迟模型之一[33]. 文献[34]对不同地区常规天气和雨雪天气条件下无气象参数模型适用性展开研究,结果表明GPT模型在常规天气中的适用性较强,UNB3模型在雨雪天气中的适用性较强. 无气象参数模型的准确性较实测气象参数模型略低,适合无法获取实测气象参数地区和实测气象参数获取困难的实时水汽监测中. 针对测站所处半球、地形高度、天气状况的差异,无气象参数模型的适用性大不相同,在实际应用中分析适合研究区域的无气象参数模型至关重要.
1.3 大气加权平均温度
除了ZWD,大气加权平均温度(atmospheric weighted mean temperature,Tm)是PWV反演的另一关键要素,是计算ZWD-PWV转换系数的重要参数,直接影响了BDS/GNSS PWV的反演精度.Tm的确定方法包括常数法、数值积分法和模型法. 当研究区域上没有测站可以获取大气垂向气象资料的条件下,可以粗略地认为区域的Tm值为常数269.8 K. 不同地区的气象参数之间差距较大,实际Tm值与常数值相差较大,常数值只能作为无气象资料的一个粗略估计,精度较差,不能满足在实际应用中的高精度需求. 数值积分法是获取Tm值方法中最精确的方法,需要使用无线电探空仪获取的大气垂直剖面数据进行积分获得高精度的Tm数据. 探空气球携带无线电探空仪每日两次(UTC 0时和UTC 12时)进行测站上空垂直方向的气象数据收集,由于探空气象站点较少,站间距离远等因素,造成获取的探空数据时空分辨率较低. 在近实时水汽监测中,无法满足实时Tm值的计算. 因此,通过模型法实时获取Tm值的实用性更强,计算更加便捷,是GNSS水汽监测中最常用的Tm获取方法,可实现高精度Tm值估算.
依据计算过程中是否涉及实际气象数据将模型法分为基于实测气象参数的Tm模型和非实测气象参数的Tm模型. 基于实测气象参数的Tm模型构建依据历史实测气象参数,具有较高的精度,在实时Tm值估算中需要输入模型相应气象参数. 目前,最常用的是依据实测地表温度数据Ts构建的线性回归模型,该模型是在Bevis提出的适用于美国中纬度地区的Tm-Ts模型的基础上,依据不同研究区域实测数据构建适用于本地的Tm-Ts线性回归模型,部分模型示例如表1所示. 本地化模型相较于区域化或全球性模型系统性偏差更小、精度更高,但需要根据实测数据及时更新模型,以保证本地化模型的高精度.Tm估算精度直接影响了GNSS PWV反演精度,许多学者对提升Tm模型估算精度展开大量研究,提出了顾及多气象因素的非线性回归模型[35-36]、顾及季节[37]、高程[38-39]的回归模型、BP神经网络算法模型[40]、随机森林算法模型[41]等,极大程度上减小了季节性偏差,提高了Tm估算精度. 非实测气象参数的Tm模型中最常用的是GPT模型,其计算Tm值无需输入任何气象参数,只需要根据年积日、测站坐标位置即可计算得到Tm值,模型的计算精度较高,在全球范围的试验中普遍取得良好效果. 文献[42]利用GPT3模型提供的Tm值反演PWV与探空数据PWV具有较强的一致性,但存在的问题是容易受到地形起伏和Tm日周期变化大的影响,导致PWV反演误差增大.大量研究表明全球化的非实测气象参数的Tm模型在无实测气象站点地区或获取气象资料困难的实时水汽监测中发挥重要的作用,可实现全球水汽监测,但全球化模型精度较低,在高精度水汽监测中的应用受到限制.
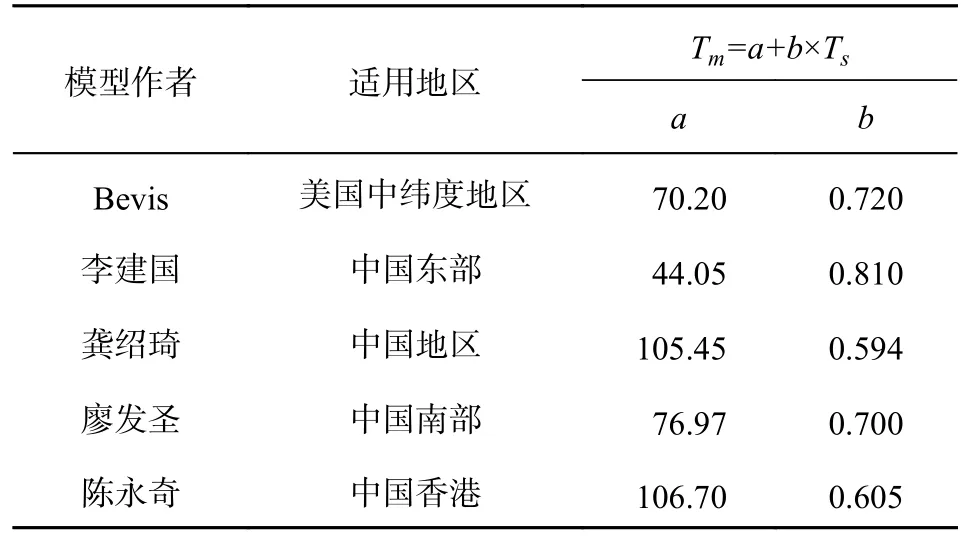
表1 Tm-Ts线性回归模型示例
1.4 BDS/GNSS水汽监测发展趋势
对于BDS水汽监测而言,实现BDS水汽产品高精度处理,深入研究BDS水汽变化的物理机制,优化水汽反演模型,提升BDS水汽监测的精度仍是备受关注的问题,应用BDS数据结合其他GNSS数据的多系统组合水汽监测模式是发挥BDS数据优势,削弱地形复杂或极端天气条件下水汽探测性能不足的问题是BDS/GNSS水汽监测的发展趋势. 随着对BDS/GNSS水汽监测的研究逐渐深入,众多学者对GNSS水汽监测提出了更高的要求. 对获取更高空间分辨率的GNSS水汽数据和建立GNSS智能化水汽监测系统的需求增加.
在提高GNSS水汽监测空间分辨率方面,虽然GNSS数据可以有效获取PWV信息,但无法同时兼顾高精度的时间分辨率和空间分辨率,存在系统偏差、数据缺失等问题. 随着全球各种水汽观测数据的公开和普及,BDS/GNSS联合多源数据融合、校正的水汽监测技术得到大力的发展,可以提高GNSS水汽产品的空间分辨率,水汽监测的范围更加全面适用性更高,精度也得到了提升. GNSS水汽监测的空间分辨率与地基测站的密度有关,通过与高时空分辨率的数据融合提高GNSS水汽数据的空间分辨率. MODIS数据和再分析资料获取方便,可以实现空间范围连续的水汽监测,表现出高时空分辨率的优势,可以作为GNSS水汽数据融合的主要数据来源. 文献[43]利用增强的时空自适应反射融合模型融合GNSS、MODIS和ERA5 PWV数据,绘制逐日空间分辨率为0.01°的水汽分布图,发挥了MODIS和ERA5数据高空间分辨率的优势,使得GNSS融合后的水汽数据空间分布更加详细合理. 文献[44-45]利用球冠谐模型协同Helmert方差分量估计方法校正GNSS、MODIS、ERA5水汽数据的区域偏差并进行水汽融合,融合数据空间分辨率和精度得到提高,且参与融合的数据源越多,融合数据精度越高. 文献[46-47]基于广义回归神经网络融合GNSS、MODIS、ERA5水汽数据生成时间分辨率1 d、空间分辨率31 km、精度2.7 mm的水汽产品. 文献[48]利用卷积神经网络将GNSS水汽数据与多源水汽数据融合,削弱了GNSS水汽数据受季节性变化的影响,空间分辨率提高,获取更加详细的水汽空间分布数据,充分开发了其他水汽监测数据的潜力. 融合方法普遍能够改善GNSS单源数据空间连续性问题,实现大范围面状水汽监测,提高GNSS PWV数据产品的空间分辨率,融合PWV数据产品的精度也在原有基础上得到提升. GNSS多源数据校正技术是通常是利用高精度GNSS水汽数据产品来校正低精度的MODIS数据产品,在研究过程中构建两者之间的线性、非线性函数关系来校正水汽数据精度,进一步提升了MODIS数据产品的水汽反演质量. 文献[49]基于GPS PWV构建线性回归模型将MODIS PWV反演RMSE由7.2 mm降至4.25 mm.文献[50]分别利用线性回归模型和BP神经网络构建GNSS-MODIS PWV函数关系,RMSE分别降低了1.61 mm和2.84 mm. 此外,许多学者将月际差异[51]、季节性[52]、周期性[53]、气候变化[54]、区域特征[55]等多个维度考虑其中,构建不同的水汽校正模型,一定程度上提高了卫星影像数据反演结果的精度和适用性,将GNSS PWV数据精度扩展到MODIS数据,可以为GNSS水汽数据空间分布提供校正信息,提高GNSS水汽反演的空间分辨率,获得更加详细可靠的水汽空间分布信息.
在建立GNSS智能化水汽监测系统方面,文献[56]基于每个CORS站实测BDS/GNSS数据建立了BDS/GNSS PWV动态变化监测系统,可以准确实时反映水汽二维空间动态变化,演示大气水汽以及相关气象因素长时间序列分析和空间动态变化,增强了灾害性天气监测预报能力. 文献[57]基于非差PPP技术通过实时接入CORS站BDS/GNSS观测数据和IGS精密轨道和钟差数据搭建重庆市对流层水汽监测平台,利用克里金插值法获取水汽空间分布,实时生成水汽格网数据,为其它省搭建GNSS水汽智能监测平台提供参考价值. 文献[58]以BDS/GNSS数据为主,结合多源水汽数据搭建BDS/GNSS PWV综合智能化反演平台,反演水汽结果精度较高,在云南省干旱监测中验证了其数据具有较强的干旱监测能力,在浙江省降水监测预报中发挥了很大的潜力. 当前,对于GNSS智能化水汽监测系统的研究较少,但通过智能监测系统可以实现高精度、实时水汽监测并绘制实时水汽空间分布图,对旱涝监测、降水预报等应用将具有重要的推动作用. 除此之外,由于人工智能算法和机器学习技术在各个领域中得到广泛应用,因此,推动GNSS水汽监测技术与5G、人工智能、大数据等先验技术进行深度融合,充分利用各种新技术的优势,提升数据挖掘与应用能力,实现GNSS水汽监测技术智能化水平的全面提升是未来研究的重点.
2 BDS/GNSS水汽监测在水利领域的应用
BDS建成以来,对其应用与服务性能的关注持续增加,水汽监测一定程度上可以反映出水汽空间分布和变化,可以实现降水预测、估计降雨量,对水利领域中水资源管理、水文循环研究、改进水文模型、水利工程建设与管理、旱涝监测、防灾减灾、灾害应急管理等具有重要的意义. BDS在水汽监测中的可行性与准确性已得到验证,但单一BDS的水汽监测在应用研究中相对较少,通常以BDS/GNSS多系统模式开展水汽监测研究,在应用研究中普遍可以获得高精度水汽数据,对水利领域应用提供了重要的空间数据支持.
2.1 改进数值天气预报的高精度水汽反演
数值天气预报是通过数值求解大气动力学方程组以定量客观地获得未来天气情况的方法,目前已在大多数国家被应用于日常天气预报中. 在中国知网和Web of Science基于主题词“BDS/GNSS PWV”的文献检索结果利用主题词“数值预报”和“numerical weather prediction”进行文献检索,结果如图3所示.近年来,对于GNSS PWV在数值天气预报中的应用研究逐渐增加,但与之相关的中文文献的发文量持续较少. 数值天气预报可以预报水汽变化、进行天气预报、降水预报,在水利行业中对水资源管理调控、农业作物干旱预警、农业灌溉、防洪抗旱等具有参考价值,中文研究领域需要更多的关注.

图3 2000—2022年BDS/GNSS PWV在数值天气预报应用研究的发文量年际变化
PWV是数值天气预报和气候研究中的一个重要参数. 数值预报模式的初始场尤其是湿度场质量的优劣,直接影响到数值模式对天气变化、未来降水的预报精度. GNSS在数值天气预报中的应用主要是数据同化的方式,常见的数值同化方法是对PWV、ZTD的同化应用. 在同化GNSS PWV数据方面,文献[59]利用地基GNSS PWV对RUG天气预报模式同化改进效果明显,尤其以3 h天气预报最佳,证明了GNSS PWV改进数值天气预报的可行性. 文献[60]基于WRF预报模式同化GPS资料对中国西南地区初始场改善及降水预报展开研究,结果表明参与同化的GPS站点数据偏少的情况下对预报模式初始场的改善较小,降水预报效果差甚至起反作用. 文献[61]发现同化BDS/GNSS PWV数据和探空PWV数据提高了模式初始水汽场的精度,导致数值预报对中国南部地区PWV和降水的预报性能提高,6 h累积降雨量预报精度提高14.8%. 文献[62]发现同化PWV数据可以提高降水预报的准确性,对降水模拟的误差降低了17%,且实际降水越大,数值预报改善效果越明显.因此,GNSS PWV在数值天气预报模式提升天气预报效果是可行的,有效减少了降水预报的误差,提高了大雨及以上的预报能力,但前提在于需要引入足够数量且数据有效的GNSS测站资料. GNSS PWV是由GNSS ZTD经过反演得出,与GNSS PWV同化数据相比,GNSS ZTD同化数据减少了误差来源且包含更多气象信息,GNSS ZTD同化数据可以有效提高数值预报水平. 文献[63]在中国华北地区验证了同化GNSS ZTD在无探空资料参与同化的条件下对预报性能的提升更大,初始水汽场的质量得到明显改善.文献[64]表明了同化GPS ZTD数据对台风初始场有明显的改进作用,从而对台风路径预报、台风主体降水的位置预报起到良好地改善作用. 文献[65]发现BDS/GNSS ZTD同化数值天气预报模式对风场、温度、地面气压预报呈现正面影响,预报误差降低,在改善天气预报、降水预报方面有很大的潜力,在参与数据同化的GNSS测站数量相对较少的情况下,预报精度提升5%.
BDS/GNSS同化数据可以明显提升数值天气预报模式的降水预报精度,对水汽变化的监测能力得到提高,对水资源管理与调度起到一定的指导作用,但却难以应用于短时天气预报,原因在于GNSS数据需要与其他数据进行数值同化,同化数据作用于数值天气预报,而传统观测方式获取数据普遍存在成本高、时间分辨率低的劣势,使得GNSS短时数值天气预报难以实现,从而使其在防灾减灾应急管理中的应用受限. 然而,GNSS水汽数据结合其他快速可用、时间分辨率相似的观测数据可以实现极短时的天气预报. 文献[66]探索了BDS/GNSS ZTD结合多普勒天气雷达径向风同化数据应用于极短时天气预报模式的可能性,填补了快速湿度信息获取的空白,实现临近5 min的天气预报模式,对湿度、降水以及风的预报都产生了积极的影响.
通过上述研究发现BDS/GNSS数据结合数值天气模式弥补了地基BDS/GNSS水汽监测空间分辨率不足的问题. GNSS水汽监测技术在数值天气预报中可以实现高精度的天气监测、降水预报、降水落点预测、降水范围预测等,从大规模时空范围了解水汽含量和空间分布. 目前存在的问题在于GNSS协同多源数据同化作用于数值天气预报,其他数据获取存在滞后性,导致短时数值天气预报应用困难,相关的研究任重而道远. 此外,接下来的研究重点在于优化ZTD、PWV以及BDS/GNSS ZTD相关参数数值同化方式,弥补高空探空气象资料、地面气象资料存在的不足,结合人工智能算法或机器学习技术对海量的气象观测数据进行数据挖掘分析,对天气预报精度进行改善. 通过BDS/GNSS改进的数值天气预报模式的有效利用,对了解大气阶段的水文循环过程机理提供参考,在水利领域中有助于水循环高效监测管理、水资源宏观调控、制定暴雨或洪涝预警应急预案与措施等.
2.2 降水短临预报
基于BDS/GNSS PWV具有高精度、高时空分辨率等优势,能够实现近实时的PWV反演,利用CORS站网能够快速获取到区域范围内PWV的时空变化,对降水短临预报提供数据支持. 极端降水,诸如短时强降水、暴雨、暴雪等,不仅仅对人民的物质财产安全造成威胁,严重情况下造成山洪、泥石流等灾害发生,对人民生命安全造成严重威胁. 因此,在极端天气短时预报中,尤其以极端降水的预警预报成果显著.在中国知网和Web of Science基于主题词“BDS/GNSS PWV”的文献检索结果利用主题词“降水预报”和“rainfall forecast”进行文献检索,结果如图4所示.GNSS PWV在降水短临预报中的应用在近5年来得到大规模的研究与发展,研究热度持续升高,研究论文发文量较之前大幅提升,英文文献发文量持续增加,但中文研究发文量持续较少且中文文献占比呈下降趋势,研究方向主要包括:降水过程水汽监测;降水短临预报等.
在降水过程水汽监测方面,文献[67]基于PPP的实时PWV进行降水监测,精度效果良好,误差为2.4 mm. 文献[68]对怀化地区汛期强降水过程中降雨量、PWV和气压变化展开分析,发现三者之间存在较强的相关关系,可为强降水预测提供参考,同时证明了GNSS水汽监测在强降水过程中应用的可行性与稳定性. 文献[69]分析了沈阳地区短时强降水过程中的PWV变化情况,得出结论:PWV变化与实际降水变化趋势一致,但并非完全对应,PWV与降雨量之间的实际转换关系需结合机理深入研究. 文献[70]对山东省暴雨发生前和发生过程的BDS PWV变化特征进行分析,发现PWV变化与暴雨发生存在较强的相关性,PWV在暴雨发生前5~12 h存在明显的上升趋势,PWV变化特征对暴雨预报存在一定的指示作用. 除此之外,BDS PWV数据产品对降水的响应程度仍需验证,许多学者研究表示PWV变化特征与降水的发生存在强相关性,研究长时序的降水发生前、中、后PWV变化特征与响应情况可以为降水预报提供重要的参考与指示作用.
在降水短临预报方面,BDS/GNSS是降水预报数据的有效来源,但并不能作为降水预报的唯一标准,仅仅依靠PWV信息不足以进行准确的降水预报,需要结合其他气象因素综合判断. 文献[71]基于BDS PWV数据提出了三因子降水短时预报模型,模型包含PWV、PWV变化、PWV变化率三因子,以PWV变化率为主要因子,月际PWV和PWV变化为辅助因子,当因子超过确定的阈值进行降水预报,基于此模型对浙江省实现高精度降水短时预报,可以提前6 h对降水进行预警预报,预报正确率达到80%. 文献[72]应用北京地区的地基BDS/GNSS数据验证了ZTD与PWV之间的相关关系达到96.76%,完全可以基于无气象数据的条件下替代PWV应用三因子模型进行降水事件的短时预报. 文献[73]分析了广东河源地区降水过程中BDS/GNSS PWV和气压变化.在水汽充足且气压足够低的条件下会发生降水事件,对降水短时预报时效性的提高有很大的帮助. 机器学习等智能算法的引入使得降水短临预报在传统方法的基础上准确率得到提高,误报率大幅度降低. 文献[74]提出一种基于长短期记忆(long short term memory,LSTM)神经网络构建的多气象因素的降水短临预报模型,利用海口地区BDS/GNSS PWV数据作为输入数据,输出结果准确率达到66%,模型误报率8%,预报效果优于传统基于PWV信息的预报方法. 文献[75]构建了基于几种典型机器学习算法的降水短时预报模型,基于北京站(BJFS)和武汉站(WUH2)BDS/GNSS PWV可以实现降水前3 h的预报,准确率在80%以上. 文献[76]发现仅依靠BDS/GNSS PWV信息进行降水短时预报误报率偏高,不足以在实际应用中进行降水预报,提出了一种结合气象信息的非线性自回归外生神经网络的降水短时预报模型,显著降低了误报率.
综上所述,BDS/GNSS PWV具有高精度、高时空分辨率的特征,可以反映水汽快速变化,与降水之间存在明显的强相关关系. 水汽变化特征在一定程度上可以反映降水的可能性,实现降水短临预报. 应用上述智能预测模型与方法均能实现降水预警预报,有效提高了预报精度,确定降水可能发生地区. 目前许多研究已经结合智能算法展开研究,但未来仍需要挖掘有用的气象信息、对智能算法进行参数优化、提高模型大规模空间适用性,不断提升降水短临预报的精度和智能化水平. 降水量是水利行业中不可或缺的气象要素,不仅影响水位、流量等水文要素,而且对水文模型的改进大有裨益,同时还对水利工程的建设与运行管理,对水环境也产生深远的影响. 从实际需求上来说,高精度、近实时、智能化的降水预测可以有效提高旱涝事件预测精度,从而实现对河湖库塘管理、防洪抗旱等防灾减灾工作做出及时的决策响应,更好地为水利行业提供服务.
2.3 气候变化监测及旱涝灾害防护
水汽是最重要的温室气体,全球气候变暖与水汽的变化密不可分,水汽的分布与变化速率直接影响着气候的演变. 气候变暖会使某地区持续异常升温,周围某地区温度下降,进一步会导致极端天气的增加,剧烈的天气变化又将影响整个气候的变化,最终导致旱涝灾害频发. 极端异常气候变化主要包括热带气旋和厄尔尼诺-南方涛动(El Niño-Southern Oscillation,ENSO)现象等. 众多学者基于水汽变化对极端异常气候变化及气候变化造成的旱涝灾害展开监测工作,在中国知网和Web of Science基于主题词“BDS/GNSS PWV”的文献检索结果分别利用主题词“洪涝”、“干旱”、“台风”、“厄尔尼诺”和“flood”、“drought”、“typhoons or tropical cyclones”、“El Niño”进行文献检索,结果如图5~6所示. 2015年以来,气象灾害发生频率逐渐增加,相关气候变化的研究日益增长,中文文献的占比也在不断提高,有关台风、洪涝的研究占比较多,证明国内学者对于研究水汽监测在气候变化监测应用中的关注度逐渐上升,对水利行业灾害预警、监测与应急管理决策起到了较大的助力作用.
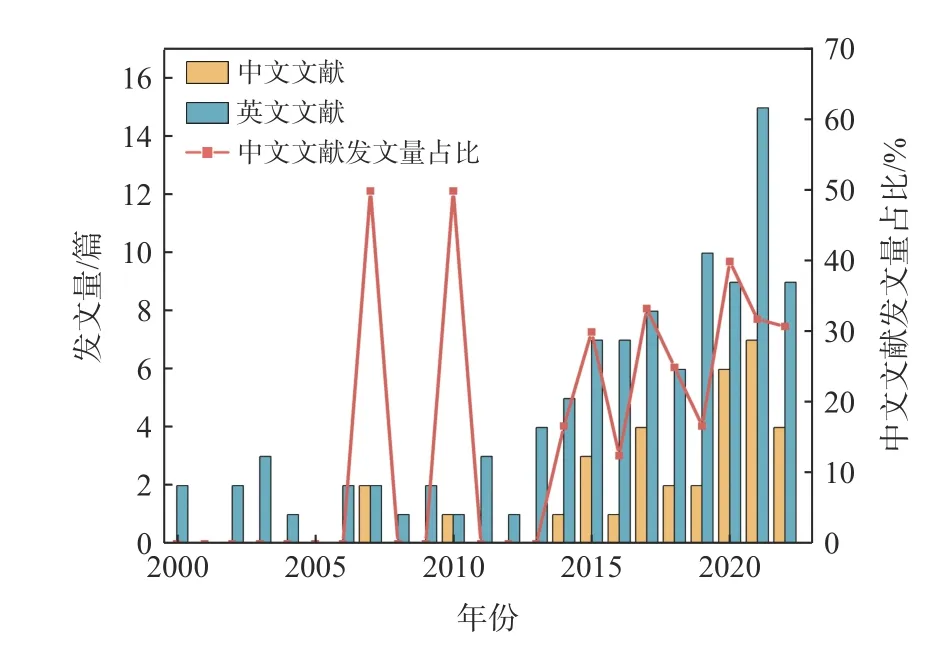
图5 2000—2022年BDS/GNSS PWV在气候变化监测的研究发文量年际变化
2.3.1 极端异常气候变化监测
热带气旋登陆过程中携带大量的水汽,造成沿海及周边地区暴雨以致洪涝事件发生,对水利领域防灾减灾工作造成了较大的威胁. 在热带气旋监测方面,文献[77]分析了EWINIAR台风过境期间PWV变化,证明了BDS/GNSS在极端气候变化中捕获变化的PWV信息的能力. 随后学者们纷纷利用PWV时空信息监测台风路径与强度[78]、台风引发降雨分析[79],以及结合数值同化信息进行台风预警和降雨预报[80].文献[81]基于60个地基GPS测站制作了台风登陆期间高分辨率的PWV等高线图,通过与降雨等值线对比发现PWV空间移动与台风路径相似,PWV移动速度与台风的平均移动速度相近,表明近实时的PWV监测可以为台风路径预测提供重要的指导作用,可以帮助我们更好地了解台风的发展变化,提供更准确的预测信息,从而更好地应对台风带来的影响. 文献[82]通过监测BDS/GNSS PWV时空变化进行台风监测,提出一种基于PWV剧增到达不同站点的时间差来估计台风运动方向和移动速度的新方法,预测结果与中国气象局预测结果高度吻合,证明了PWV监测在台风预测中的可行性与准确性. 文献[83]分析台风“利奇马”登陆期间山东地区的PWV含量及分布变化与降水变化,可以明显反映出台风水汽输送的过程.
ENSO事件的发生在大气环流的作用下会对整个地球的气候变化造成影响,造成多地区持续旱涝.在ENSO事件的监测方面,海表温度是最重要的监测指标之一,故PWV与海表温度之间的关系[84]、GNSS PWV对于ENSO事件的响应[85]、GNSS PWV结合多气象因素监测ENSO、GNSS PWV预测ENSO事后旱涝结果[86]是监测研究中的重点. 文献[87]发现PWV与ENSO存在相关关系,PWV的异常变化是对ENSO事件发生前的响应,研究长时间序列的PWV非线性变化与多变量ENSO指数(multivariate ENSO index,MEI)之间相关系数达到0.78,证明地基BDS/GNSS PWV结合多气象因素监测ENSO事件的可能性. 文献[88]对ENSO期间水汽时间、空间、垂向变化做出分析,发现ENSO与PWV呈正相关关系,通过PWV可实现ENSO监测,ENSO事件后造成极端降水,但引发异常降水的原因复杂,并非PWV一种影响因素. 文献[89]分析了ENSO过程中BDS/GNSS PWV与海表温度时空变化特征,发现海表温度异常变化与PWV具有强相关性,并在此基础上提出一种适用于中国东南地区进行ENSO监测的SPTI指数.
2.3.2 旱涝监测
中国特定的地理和气候条件决定了我国是一个水旱灾害频发的国家,近年来极端天气事件的发生频率愈加频繁、强度不断增强,导致旱涝灾害频发. 例如,2021年郑州“720”特大暴雨导致城市内涝严重;2022年四川遭遇多轮强降雨引发山洪灾害;2022年长江流域持续性极端高温、降水异常偏少,遭遇了60年以来最严重的气象干旱. 由于极端天气事件频发,使得极端气候变化加剧,造成的损失越来越大. 因此,加强水利行业防灾减灾能力是一项长期的工作.目前,对于干旱监测主要是通过干旱监测指数进行的,BDS/GNSS PWV在干旱监测中的应用包括两方面:改进现有的干旱监测指数和基于PWV构建新的干旱监测指数. 文献[90]基于BDS/GNSS PWV和温度数据,提出了改进的TH模型,即RTH模型,在此基础上引入分段线性回归模型拟合TH模型与PM反演PET差值,并构建了HPET模型,在黄土高原的应用效果明显优于RTH模型[91]. 文献[92]在此RTH模型基础上结合高精度站点ETP和SPEI,构建了适用于中国区域的C-RTH模型. 此外,国外PWV干旱监测研究中文献[93]以BDS/GNSS PWV作为供水指标构建了大气作物水分指数,作为大气干旱监测指数. 文献[94]利用BDS/GNSS PWV和降水数据构建多时间尺度标准化降水转换指数,在全球大陆地区干旱监测发挥了良好的性能.
PWV在洪涝监测中的应用主要包含洪涝预测、灾中监测以及事后分析. 降水是影响洪涝发生的主要因素,对降水的高精度预测极大程度上反映了洪涝预测模拟的准确性. 降水是洪涝预测模型中重要的输入参数之一,文献[95]依据降雨资料构建了灰色灾变预测模型,提前预测了辽宁省的洪涝灾害发生情况. 在洪涝灾害发生期间往往伴随着强降雨,大气中的水汽变化复杂,监测困难. BDS/GNSS PWV数据作为降水资料参与洪水预测在国内的研究较少,国外相关研究中文献[96]结合多参数要素特征基于神经网络和灰狼优化算法建立了洪水预测模型,可以实现较高精度的空间洪水分布和强度预测. 文献[97]验证了GPS PWV在强降雨引发的山洪期间水汽监测的可能性,在洪水期间PWV对强降雨存在显著的响应. 文献[98]分析了马来西亚山洪发生前后、发生期间的PWV含量和空间分布状况,验证了PWV对山洪期间降雨量的响应,监测PWV含量有助于对山洪灾害的发生做出及时的响应.
总的来说,水汽相变会吸收或释放潜热,导致气温变化,进而影响气候变化,影响地球水循环,气候变化的结果即使造成旱涝灾害频发. 水汽含量与空间分布、水汽传输与极端降水、旱涝灾害乃至气候变化的发生以及反映ENSO事件的影响息息相关. 上述研究反映GNSS水汽监测在气候变化监测中可以发挥巨大的优势,基于其高精度、高时空分辨率、近实时水汽监测的优势有效进行台风路径、强度、降水监测,为旱涝监测提供基础气象数据. 对于旱涝监测的研究,未来的研究方向在于从机理角度深度挖掘水汽与干旱的关系,构建新的干旱监测指数在不同地区进行干旱监测试验;应用智能化算法结合高精度GNSS降水资料构建洪涝预测模型,对现有预测模型进行参数优化与改进,提升洪涝预测的精度,挖掘更多的智能算法应用于洪涝监测. 从水利防灾减灾角度来讲,快速反映灾害信息、确定灾害范围是应急工作的首要任务,GNSS水汽监测对确定旱涝防御策略有着重要的推动作用,能够满足水利、气象、农业、生态等领域的实际需求,但目前在实际应急减灾中的应用较少,对于旱涝的综合预测功能有待改善.
3 总结与展望
作为一种新兴的水汽探测技术,GNSS水汽探测在实际应用中已经被证实具有良好的应用前景,与传统水汽监测手段相比具有全天时、全天候、高精度、高时空分辨率、成本低廉等优势. 当前,GNSS PWV水汽反演技术发展迅速,中国BDS在水汽探测试验中可行性和准确性得到一定验证,但单一BDS在不同地形条件和天气条件下获取水汽数据的稳定性和准确性有待进一步验证. 此外,如何获得更高时空分辨率的水汽信息是研究中亟待解决的问题. BDS/GNSS PWV反演是以接收机接收卫星导航信号为基础进行反演的,而地基CORS测站的密度是影响其时空分辨率的主要原因,单纯通过增加测站数目和增加测站分布来提高水汽监测区域尺度上的时空分辨率,并非最佳解决方案. 随着全球水汽观测资料的不断丰富,基于线性回归和机器学习算法的多源数据校正模型在实际应用中得到广泛应用,可有效提高现有监测手段的精度,对于降雨、气候、环境等方面的监测有着十分重要的意义. 然而,多源数据融合才是提高GNSS水汽探测时空分辨率的有效之举,其难点在于不同数据获取周期不同,难以实现实时融合数据的获取以及存在GNSS PWV点状数据扩展到面状数据的误差问题,伴随着人工智能算法研究的深入对多源数据融合有很大的推动作用,构建人工智能数据融合算法融合多源数据仍是下一步的重点,因此GNSS多源数据融合的研究仍有很长的路要走.
从水利领域应用角度上看,BDS/GNSS PWV水汽反演技术是理论研究中的热点问题,在部分地区水汽监测可行性得到验证,但较少在实际业务化应用中发挥作用,大多仍处于研究层面. 许多学者利用GNSS PWV进行降水短临预报、异常气候变化、旱涝监测等,在研究中均取得较好的结果,但如何将其转化为实际应用、建立智能化水汽监测系统、提升水汽监测智能化水平,并且验证其在实际业务化应用中的可靠性仍需深入研究. PWV与实际降水之间存在显著的相关性,在一定程度上可以预测未来的降水情况,而降水是水利领域中的研究重点,受众多因素的影响.在实际业务化需求中不可能仅仅基于实时的GNSS PWV数据对降水进行预警预报,必须综合考虑其他气象因素,对未来的降水形势进行综合预测,多参数输入的机器学习预测模型和深度学习模型的研究必然是实现高精度降水短临预报的关键与重点,但同时存在实时气象数据获取困难、数据滞后的问题,无气象参数预测模型的研究也是降水短临预报的要点. 随着GNSS技术研究的不断深入,BDS/GNSS水汽探测技术势必会在水利领域中得到更多的应用,将研究成果扩展到业务化应用是此后研究的必经之路,搭建全国一体化、各省市的水汽分布监测与灾害预警平台,对提升水汽监测智能化水平,对水循环研究、水资源管理调控、流域管理、防灾减灾、应急管理等具有重要的支撑作用,对人民的生产生活有着重要的意义.
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
中等数学(2022年5期)2022-08-29
作文周刊·小学一年级版(2022年24期)2022-06-18
内蒙古气象(2021年2期)2021-07-01
领导决策信息(2018年46期)2018-04-20
百科探秘·航空航天(2017年11期)2017-12-20
石油地球物理勘探(2017年4期)2017-12-18
石油地球物理勘探(2017年2期)2017-11-23
高原山地气象研究(2016年1期)2016-11-10
广东海洋大学学报(2015年3期)2015-12-22
