
3RPS并联机构的运动学误差建模及其分析
2024-02-29 09:24彭高磊郭祥雨钟诗胜
机械设计与制造 2024年2期
王 瑞,彭高磊,郭祥雨,钟诗胜
(1.哈尔滨工业大学(威海)海洋工程学院,山东 威海 264209;2.哈尔滨工业大学机电工程学院,黑龙江 哈尔滨 150001)
1 引言
大型舰船用螺旋桨叶片是典型的自由复杂曲面,其表面加工精度和质量直接影响螺旋桨的工作性能,因此对其加工装备的末端输出精度提出了较高的要求。采用XYZ-3RPS型六轴卧式混联机床加工叶片,可以实现末端刀具位姿的灵活调整,但由于3RPS并联部分静态误差较为显著,使得混联机床末端精度难以保证[1]。因此,对3RPS并联部分进行运动学标定研究,以实现在不提高混联机床加工制造成本的基础上大幅提高其运动精度,具有重要意义。而误差建模作为运动学标定的首要条件和数学基础,直接影响到参数辨识的精度与效率。
空间并联机构运动学标定的大多数文献集中于6-UPS、3-PRS型并联机构[2-5],针对3RPS型并联机构运动学标定的文献并不太多,且按照误差建模方法的不同主要可以分为三类:基于位置逆解的误差建模、基于位置正解的误差建模,以及基于误差雅可比矩阵的误差建模。文献[6-7]以并联机构的位置逆解为基础来建立误差模型,通过最小二乘等数学优化方法解出误差参数,该方法对杆长误差的识别效果较好,对其他误差源识别性较差,且需要获取末端的全位姿信息。文献[8]基于控制变量的思想,通过依次赋予某项结构参数一单位误差,而保持其它结构参数为理论值,将单误差机构通过位置正解所得的末端位姿与理想位姿之差作为误差雅可比矩阵中的对应元素,从而建立末端测量方式误差与结构参数误差之间的映射模型;用该方法辨识出的结构参数误差进行补偿,只能保证在局部工作空间中具有较好的精度。文献[9-10]均采用矢量微分法,通过将误差闭环方程向驱动支链与约束方向投影,建立了3RPS并联机构的误差映射模型,但尚未考虑转动副轴线的方向误差,且后者参数解耦移动副轴线与转动副轴线间的垂直度误差和铰链位置误差考虑不够完备。
为了提高XYZ-3RPS六轴卧式混联机床中并联部分的运动学精度,在前人研究方法的基础上进行改进,建立了3RPS 并联机构包含转动副轴线方向误差等27 项结构参数误差对末端位姿误差的映射模型;通过仿真实验,验证了误差模型的精度和有效性,为3RPS等少自由度并联机构的误差建模和运动学标定提供理论依据。
2 3RPS并联机构
2.1 3RPS并联机构分析
XYZ-3RPS六轴卧式混联机床是在XYZ型串联机构的执行末端平台安装3RPS并联机构,在并联机构动平台中心安装主轴刀具所构成。XYZ-3RPS六轴卧式混联机床的实物模型,如图1所示。
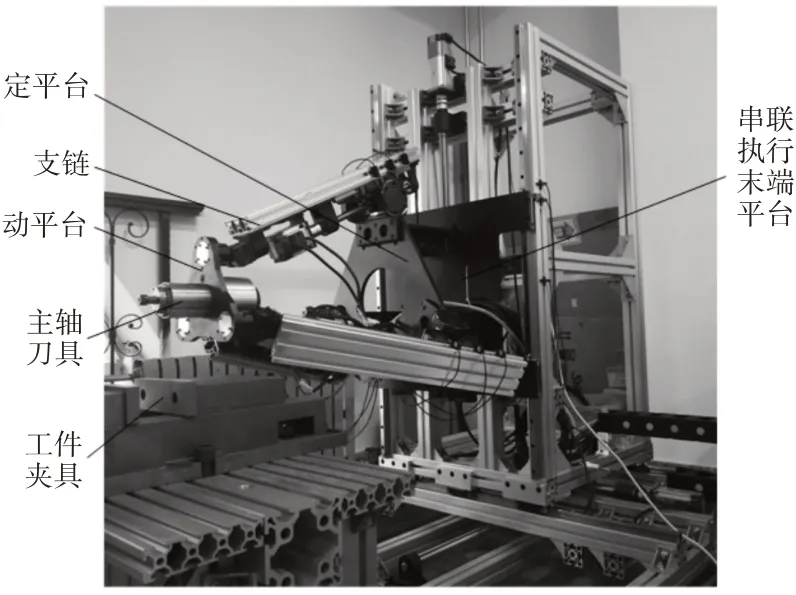
图1 XYZ-3RPS六轴卧式混联机床Fig.1 XYZ-3RPS Six-Axis Horizontal Hybrid Machine Tool
3RPS并联机构部分主要负责刀具姿态调整,其由动平台和定平台,以及两者之间并行的3条支链组成。该机构每个支链包括3个运动副,其中球副(Spherical,S)是采用3个串联转动副等效而成,均匀布置在动平台上,3个转动副轴线的公共交点即为球副的中心;转动副(Revolute,R)均匀布置在定平台上;移动副(Prismatic,P)采用“伺服电机+丝杠螺母副+导轨滑块副”的组合形式,驱使动平台相对于定平台在空间内运动。与传统RPS支链的区别在于,移动副的滑块同时充当了转动副的摇块。
2.2 相关坐标系和符号的定义
3RPS并联部分的抽象结构,如图2所示。3个转动副中心记为B(ii=1,2,3),3个球副中心记为A(ii=1,2,3);3个转动副中心和3个球副中心的分布圆半径分别记为R、r。等边ΔA1A2A3与等边ΔB1B2B3分别表示动平台和定平台。为了描述动平台的空间刚体位移,在定平台上建立定平台坐标系(以下简称定系)OS-XSYSZS,记为{S},该系的原点OS为3个转动副的分布圆圆心,XS轴过B1且平分∠B2B1B3,YS轴平行于B3B2,ZS轴符合右手定则;在动平台上建立动平台坐标系(以下简称动系)OM-XMYMZM,记为{M},该系的原点OM为3个等效球副的分布圆圆心,XM轴过A1且平分∠A2A1A3,YM轴平行于A3A2,ZM轴符合右手定则。并联机构处于初始位形时,动系{M}具有与定系{S}一致的姿态信息。
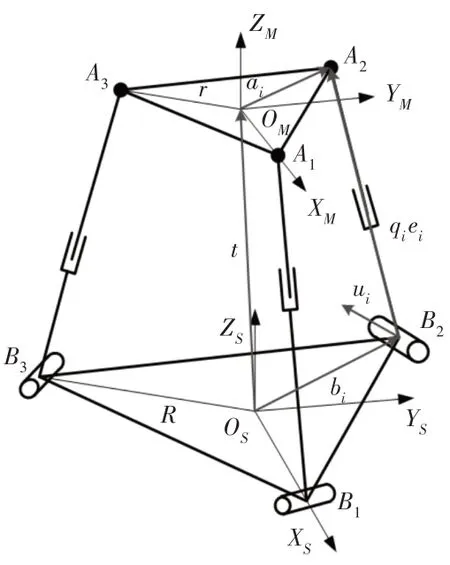
图2 3RPS并联机构的抽象模型Fig.2 Abstract Model of 3RPS Parallel Mechanism
3 几何误差分析与建模
几何误差建模是运动学标定的重要环节,其主要任务是构造机构输出位姿误差与各结构参数的几何误差源之间的映射关系。
3.1 几何误差分析
机构的名义构型和实际构型之间总是存在误差的,这些误差源是影响3RPS并联机构运动精度的重要因素。3RPS并联机构的几何误差源主要有以下三种:一是铰点位置误差,包括球副中心Ai在动平台上的位置误差和转动副中心Bi在定平台上的位置误差,共2×3×3=18项;二是转动副轴线方向误差2×3=6项,以及移动副连杆的零位杆长误差3项,合计27项几何参数误差。
3.2 误差模型建立
动系{M}相对于定系{S}的位置参数(x,y,z),为动系{M}原点OM在定系{S}中的三坐标;姿态参数有多种描述形式,考虑到在3RPS并联机构的末端位置分析,及后续运动学标定补偿分析过程中,都是以定系作为度量基准展开的,故采用Z-Y-X固定角描述:动系{M}的初始姿态与定系{S}相同,首先使动系绕定系ZS轴转γ角,然后绕YS轴转β角,最后绕XS轴转α角。动系{M}相对于定系{S}的位姿关系用旋转矩阵R和平移向量t表示为:
其中,sα=sinα,cβ=cosβ,sβ、cβ和sγ、cγ同理。
如图2所示,以定系{S}为基准,3RPS并联机构单一支链的闭环矢量方程可表述为:
式中:ai—球副中心Ai在动系{M}中的位置矢量;bi—转动副中心Bi在定系{S}中的位置矢量;qi—第i条支链的驱动杆长;ei—定系{S}下第i条支链移动副轴线方向的单位矢量。
对式进行一阶微分处理可得:
式中:δR—旋转矩阵R的变换微分,其表达式为:
由微分运动的原理可知,当动系绕定系旋转的X-Y-Z固定角较原先参数出现微小偏差δα、δβ、δγ时,其实际姿态相当于名义姿态对定系{S}进行了一次微小旋转ΔR:
式中:RR—动系相对于定系的实际旋转矩阵。
利用式可将式转化为:
式中:δω—动系相对于定系的旋转矩阵的误差向量;
利用式将式转化为:
令上式等号两端矩阵各对应元素相等,可得:
将式等号两端同时左乘uiT,即向ui方向投影,并结合式,可得:
式中:ui—第i条支链转动副轴线方向的单位矢量,用球坐标表示为:
式中:θi—ui在定系XSYS平面的投影与XS轴正方向的夹角,θi=(4i-1)π 6;ϕi—ui与定系ZS轴正方向的夹角
由于转动副的约束性质,存在ei⋅ui=0,对其一阶微分处理,可得:
利用式,式可进一步转化为:
式中:q0—理想初始位形下各支链球副中心与转动副中心的距离。
将式等号两端同时左乘eiT,即向ei方向投影,结合eiTei=1,,以及式,可得:
综合式与式,3RPS并联机构的误差映射模型为:
模型中的误差项δr包含了各支链球副中心的位置误差δai、转动副中心的位置误差δbi、零位驱动杆长误差δqi、转动副轴线方向误差与零位杆长的乘积q0δθi、q0δϕi;误差雅可比矩阵J仅与机构的名义运动学参数r、各支链驱动杆长q=(q1,q2,q3)T有关,而与结构参数误差无关。
4 ADAMS仿真验证
根据前文对几何误差源的分析,基于ADAMS 虚拟样机技术,验证建立的误差模型的有效性。
4.1 仿真验证思想
实验过程中构建一个带有已知结构参数误差的虚拟3RPS并联机构模型,如图3所示。其实际结构参数为理论设计参数与结构参数误差之和。首先给出并联机构末端的目标位姿集合,通过运动学逆解可以得到目标位姿对应的驱动杆长,然后将其作为驱动,借助3RPS误差虚拟样机仿真获取末端的实际位姿,其与目标位姿之差即为实际的末端位姿误差;同时利用3.2节的误差模型可获得计算的末端位姿误差。最后计算两种方法得到的数据间偏差,即可评价误差模型的精度。

图3 包含误差源的虚拟3RPS并联机构Fig.3 Virtual 3RPS Parallel Mechanism Including Error Sources
4.2 仿真实验
设置两组3RPS并联机构各支链几何参数误差δr1和δr2,如表1所示。混联机床中3RPS并联机构部分的理论可行工作空间与主要名义几何参数,如表2所示。

表1 3RPS并联机构结构参数误差预设值Tab.1 Preset Values of Structure Parameter Errors of 3RPS Parallel Mechanism

表2 3RPS并联机构理论可行空间与主要名义几何参数Tab.2 Theoretical Feasible Space and Main Nominal Geometric Parameters of 3RPS Parallel Mechanism
为了使测量点尽可能涵盖机构整个工作空间,以便衡量误差模型在整个工作空间范围的计算精度,综合考虑实验的工作量,分别选取3RPS并联机构的3个自由度z等于350mm、370mm、390mm,α,β∈{-20°,-10°,0°,10°,20°},如此产生75组测量点。
误差设定值为δr1和δr2时,误差模型的计算绝对偏差,如图4、图5所示。图中测量点(1~25)、(26~50)、(51~75)分别为参数z取350mm、370mm、390mm时的结果。通过上述仿真实验可以看出,忽略结构参数误差引起的并联机构末端位姿高阶微小量,建立的线性误差模型对其末端的位置和姿态误差皆具备较高的求解精度。在两组误差设定值δr1和δr2时,末端角度误差绝对偏差计算结果均小于0.01°,位置误差绝对偏差计算结果均小于0.01mm,能够满足运动学参数标定所要求的计算精度。通过对比图4、图5可以发现,减小结构参数误差的预设值,误差模型的计算精度会显著提高。

图4 误差设定值δr1下75组测量点的模型偏差Fig.4 Model Errors of 75 Sets of Measurement Points Under the Error Setting δr1
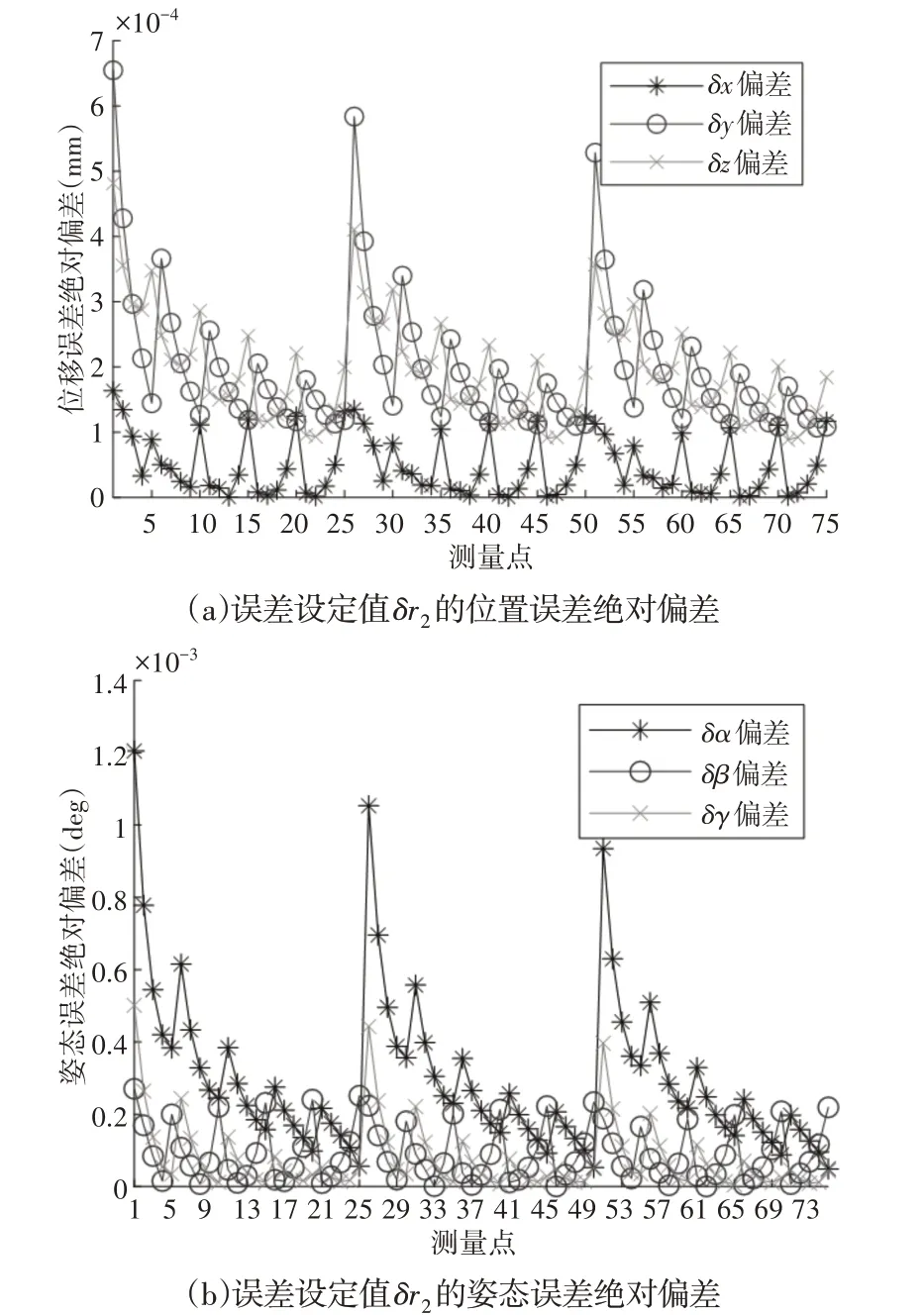
图5 误差设定值δr2下75组测量点的模型偏差Fig.5 Model Errors of 75 Sets of Measurement Points Under the Error Setting δr2
进一步分析发现,误差模型计算精度随z值的增大而提高,且不同测量点的计算精度有所差异,原因在于推导式过程中eiT δei原则上并不能一概近似为0,因为δei与δui满足式所示的约束关系,即δei并非独立几何误差,其值是由所有几何运动参数共同决定,且经过qi的放大,在某些测量点处qieiT δei的数量级与其他项相差较小,故会产生舍去误差。
5 结论
(1)对3RPS并联机构影响运动精度的主要几何误差源进行了分析;并基于微分法,利用闭环矢量方程和转动副约束关系,推导建立了3RPS并联机构包含转动副轴线方向误差等27项几何参数误差对末端位姿误差的映射模型,建模方法具有一定的通用性。
(2)借助ADAMS 虚拟样机技术,仿真验证了微小误差情况下,所建立的误差模型具有较高的精度和有效性,且误差模型的计算精度会随着结构参数误差的减小而显著提高。
猜你喜欢
河北省科学院学报(2020年1期)2020-05-25
制造技术与机床(2018年11期)2018-11-23
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年4期)2016-11-07
湖北工业大学学报(2016年5期)2016-02-27
海军航空大学学报(2015年1期)2015-11-11
实用手外科杂志(2015年2期)2015-08-28
饲料博览(2015年4期)2015-04-05
北京航空航天大学学报(2014年1期)2014-12-19
机械制造与自动化(2014年1期)2014-03-01
