
基于VPNRS-RF的飞机液压系统故障诊断模型
2024-02-29 09:24李耀华王签签
机械设计与制造 2024年2期
李耀华,王签签
(中国民航大学航空工程学院,天津 300300)
1 引言
液压系统是飞机重要的功能系统,主要用于起落架、襟翼和减速板的收放、前轮转弯操纵和燃油泵的液压马达等,其故障会直接影响飞机的飞行安全[1-3]。据统计,相比飞机其他系统来说,液压系统发生故障概率较高,约占飞机机械系统总故障的30%左右,其健康状态直接影响飞机的安全性和可靠性[1-2]。因此对飞机液压系统进行故障检测和诊断,成为飞机健康管理技术的一个研究热点。
目前,针对液压系统故障诊断问题国内外学者从不同的角度展开了研究,文献[1]利用人工蜂群优化BP神经网络,以提高飞机液压系统故障诊断精度。文献[4]基于BNfinder软件数据处理优化贝叶斯网络结构,分析液压系统故障原因。文献[5]提出一种基于LSTM与CNN相结合的高速柱塞泵故障诊断方法。对于液压系统故障诊断,大多学者着重于故障诊断模型的改进,对冗余特征影响模型准确率方面研究不是太多,但特征选择对于民机液压系统的故障诊断有非常重要的影响。
文献[6]通过DPCA对故障特征进行降维,然后采用GA-SVM实现液压系统故障诊断。文献[7]通过对所提取特征参数进行敏感度分析,结合EMD-PNN实现快速有效的柱塞泵故障诊断。但是,对于敏感且重要特征参数的选取,需要综合考虑特征与类别之间的多方面因素。
特征选择作为机器学习的一个非常重要的预处理步骤在计算机等其他领域已经得到了广泛的应用[8-9]。变精度邻域粗糙集[10-11]结合了变精度粗糙集和邻域粗糙集的优势,综合考虑了条件属性对决策属性结果的影响,而随机森林[12]基于变量重要性度量对特征进行重要度计算,相较于过滤性特征选择算法具有模型性能优良的优点,故将变精度邻域粗糙集(VPNRS)与随机森林(RF)相结合进行分阶段特征选择。并在液压系统故障分类阶段,采用OS-ELM作为分类模型对飞机液压系统进行故障诊断。
2 飞机液压系统故障诊断模型构建
2.1 VPNRS-RF评价指标
特征选择的核心是在全部特征集合中去除无关特征,保留与类别相关的条件属性,使得所选子集具有最大相关性和最小冗余性。不同评判特征间类别可分能力指标拥有不同的筛选能力和约简范围,单一的评价指标易造成约简集合次优。为了有效的选取对故障信号较为敏感的特征,提出一种变精度邻域粗糙集与随机森林相结合的特征选择方法。该方法利用VPNRS度量特征与类别间的关联度,RF作为分类器评判特征的类别可分能力,来作为一种特征排序度量标准。
VPNRS-RF算法是一种基于属性依赖度和分类器的特征重要度的阶段特征选择方法。设在原始数据集中,有M种故障类型,每种故障类型有K种统计特征,则可表示为:
求解F的子集S={f1*,f2*…fN*}(N<M)。
为获取含有N个特征的最优特征子集,将决策属性对条件属性的依赖度作为条件属性对决策属性的影响程度的评价指标,可用以下公式计算特征重要度大小:
式中:a∈B,a—条件属性;
B—条件属性子集;
D—决策属性;
γB(D)—D对B的依赖度。
含有N个特征的子集可能只是次优约简,当其中一个特征信息可以由另外特征推断得知,特征删除时不会对分类结果造成太大影响,因此,采用基于分类器平均精确率减少作为评价指标,直接度量每个特征对模型准确率的影响,赋予特征重要性权重。
式中:errOOB1—添加噪声前的袋外数据误差;
errOOB2—添加噪声后的袋外数据误差。
2.2 基于VPNRS-RF的特征选择方法
变精度邻域粗糙集是在邻域粗糙集的基础上引入了包含度阈值,扩大正域,使模型具有一定的容错性,使得边界域中一些有用的信息进入正域,极大程度地保留了核心特征,但是仍然存在着对类别属性影响较弱的条件属性,而随机森林算法基于变量重要性度量在变精度邻域粗糙集属性约简后,极大程度的降低了特征相关性冗余度的基础上,对特征进行重要性排序,使得赋予特征重要性权重准确度提升,进行进一步筛选后可获取最优特征子集。算法流程,如图1所示。
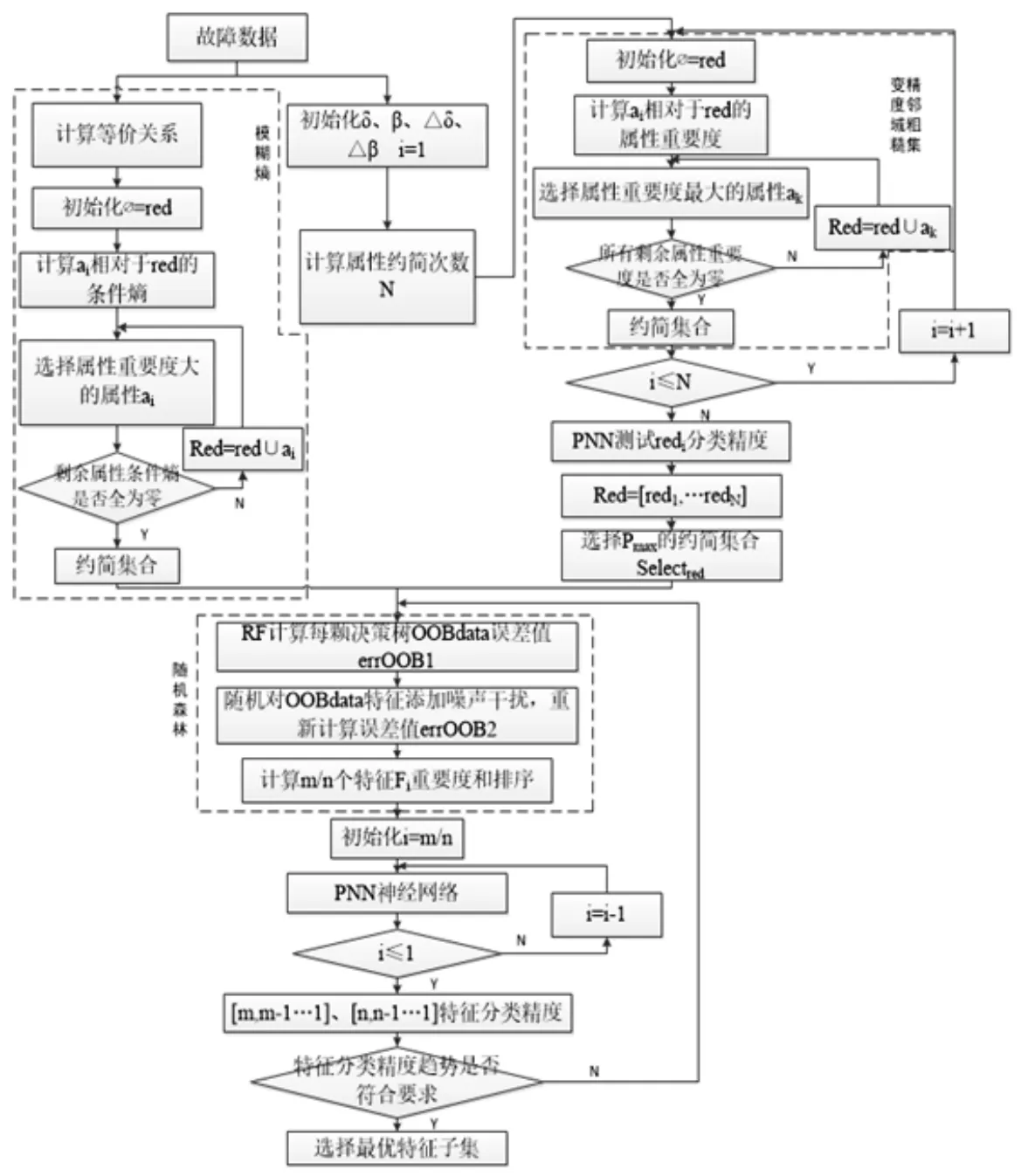
图1 VPNRS-RF特征选择流程图Fig.1 Flowchart of VPNRS-RF Feature Selection
构建VPNRS-RF特征选择算法基本步骤如下:
(1)设置邻域半径δ和阈值β取值范围为步长分别为Δδ和Δβ,则约简属性次数为:
(2)初始化属性约简次数1 ≤i≤N。
(3)使用变精度邻域粗糙集计算邻域半径δ=δmin+(i-1) Δδ,阈值β=βmin+(i-1) Δβ时的约简特征子集{red1,red2…redN}。
变精度邻域粗糙集算法主要步骤:
①初始化red=∅;②根据邻域半径δ和阈值β,计算邻域关系NA及其对应属性依赖度γai(D);③对任意ai∈C-red,计算sig(ai,red,D)=γred∪{ai}(D)-γred(D);④选择属性重要度大的条件 属 性ak,其 满 足sig(ak,red,D)=Max(sig(ai,red,D));⑤若sig(ak,red,D)>0,则red=red∪ak,转到步骤(3);⑥输出red。
(4)利用PNN 神经网络分别计算在不同邻域半径和阈值下的约简集合redi的分类精度。
(5)选择分类精度最高的约简集合特征Selectred作为步骤6)的输入数据。
(6)随机森林重要度计算方法主要有三种,在此采用置换法OOB data 计算误差值,以平均精度降低作为特征重要性评价指标,对特征进行排序,该步骤主要分为2个过程:
第一个过程为对于随机森林中的每一颗决策树,使用相应的OOB(袋外数据)数据来计算它的袋外数据误差,记为errOOB1。然后随机地对袋外数据OOB所有样本特征加入噪声干扰,再次计算它的袋外数据误差,记为eerOOB2。
第二个过程为利用特征重要性的计算式(3)来计算特征重要性并对特征进行排序。
(7)使用序列后向选择方法(SBS)从特征的全集开始搜索,每次从特征子集中去掉一个特征,采用PNN神经网络来获取不同特征子集分类准确率。
(8)由于随机森林的固有随机性,可能每次给予特征不同的重要性权重,导致得到的特征数随准确率变化趋势产生差错,可以通过再次返回步骤(6),以选出分类准确率最高的特征子集作为集成模型的输入数据集。
2.3 基于VPNRS-RF的OS-ELM故障诊断模型
2.3.1 OS-ELM算法
OS-ELM 算法[13-14]对于单隐层神经网络的输出权重的学习过程主要分为两部分:
第一部分是初始阶段,假设有N0个任意训练样本(Xi,ti)∈Rn×Rm,其中Xi=[xi1,xi2…xin]T为学习模型的输入值,ti=[ti1,ti2…tin]T为学习模型的期望输出,利用ELM 数学模型,求得使满足‖H0β-T0‖的最小值β0,其中:
式中:g(·)—隐含层的激活函数;
ai—输入层与隐含层之间的权值;
bi—隐含层的偏差。
所用到的激活函数有:
接着采用最小二乘法和广义逆的思想,求出隐含层权值β0为
第二部分是在线学习阶段,当有新的样本进入模型时,由在线学习的递推公式可得出输出权值:
2.3.2 飞机液压系统故障诊断模型这里液压系统故障诊断模型构建主要分为如下两个部分:
(1)特征选择:由飞机液压系统仿真信号得到的量化特征集存在高维度及大量冗余问题,利用VPNRS-RF 特征选择算法选取维度低、敏感度高且分类错误率小的主要特征向量。
(2)模型构建:OS-ELM具备了ELM模型的速度和泛化能力上的优点,并且可以随着新数据的到来不断更新模型,可以进一步提高飞机液压系统故障准确率。流程图,如图2所示。
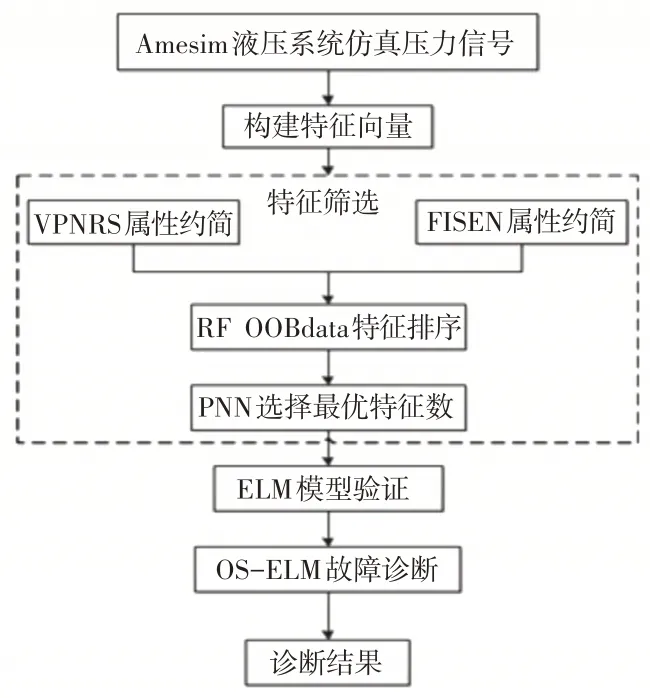
图2 基于VPNRS-RF的OS-ELM流程图Fig.2 OS-ELM Flow Chart Based on VPNRS-RF
步骤如下:
(1)基于Amesim飞机起落架收放系统仿真模型的压力信号,构建特征向量。
(2)对数据进行归一化处理,基于变精度邻域和模糊熵粗糙集理论,对数据样本进行属性约简。
(3)基于步骤(2)属性约简特征,利用RF算法OOB data计算误差并对特征进行重要度排序。
(4)利用PNN神经网络选择合适的特征数目K。
(5)基于ELM分类模型,将VPNRS-RF与其他特征选择方法进行对比,验证VPNRS-RF算法的优越性。
(6)将选择特征作为OS-ELM输入参数,进行故障诊断和结果分析。
3 仿真研究
3.1 仿真建模
建模完成后,按照飞机液压系统相关资料输入相关参数,具体设置参数,如表1所示。

表1 起落架收放系统仿真模型参数设置Tab.1 Parameter Setting of Simulation Model of Landing Gear Retraction System
选取对象是某型飞机液压系统起落架收放系统,在AMESim仿真平台下建立液压系统仿真模型,建立的模型[1,3,15],如图3所示。

图3 飞机液压系统仿真模型Fig.3 Simulation Model of Aircraft Hydraulic System
相关参数设置完成后,运行该模型,液压泵输出压力随时间变化曲线,如图4所示。飞机液压系统的故障模式通过改变模型的物理参数来设置,通过改变模型的泄露系数、油滤孔径、油液空气含量来分别模拟泄露、堵塞、气塞、堵塞和气塞、泄露和堵塞五种故障模式。
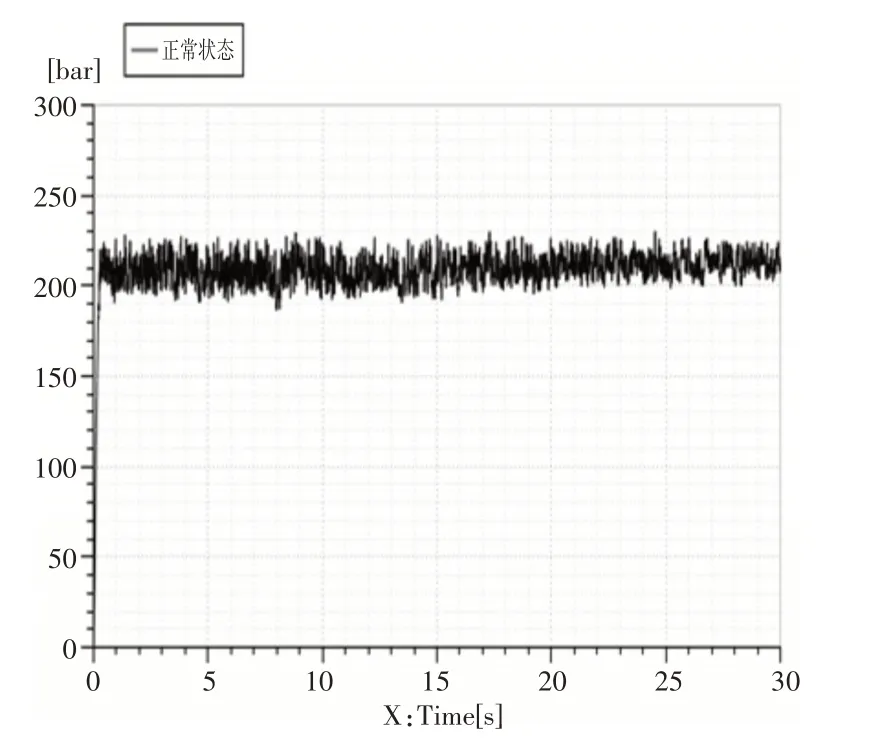
图4 飞机液压系统正常情况下泵输出压力仿真结果Fig.4 Simulation results of Pump Output Pressure Under Normal Conditions of Aircraft Hydraulic System
3.2 VPNRS-RF特征选择
这里要监测和采集的数据是飞机液压系统的液压泵出口压力信号,以飞机起落架放下过程为仿真的工作过程,在6种状态下分别采集了3000个样本,从中各选取2500个样本,将其分成50段,每段50个样本,构建特征集合,并利用VPNRS-RF算法进行特征筛选,以获取最优特征子集作为OS-ELM故障诊断模型输入,来提高飞机起落架收放系统故障诊断精度。首先选取决策属性D={1,2,3,4,5,6},分别对应6种状态,选择分别于系统相关的18个条件属性C={c1,c2…c18}。在变精度邻域粗糙集算法中,有两个变量邻域半径δ和阈值β,不同的邻域半径δ和阈值β,将得到不同的约简集合。设置变量δ的值从(0.05~0.5)以步长0.05变化,变量β的值从(0.5~1)以步长0.1变化。选择特征个数和PNN分类精度随δ和β的变化,如图5、图6所示。从图6可以得出当δ和β为(0.1,0.5)和(0.15,0.7)时分类精度最高,特征选择个数为8,分别为{c1,c4,c5,c7,c8,c10,c12,c15}和{c1,c4,c5,c7,c8,c10,c14,c15},由 于δ和β在这两种情况下,选择特征大多重合且分类精度相等,因此将选择的特征融合为{c1,c4,c5,c7,c8,c10,c12,c14,c15}。
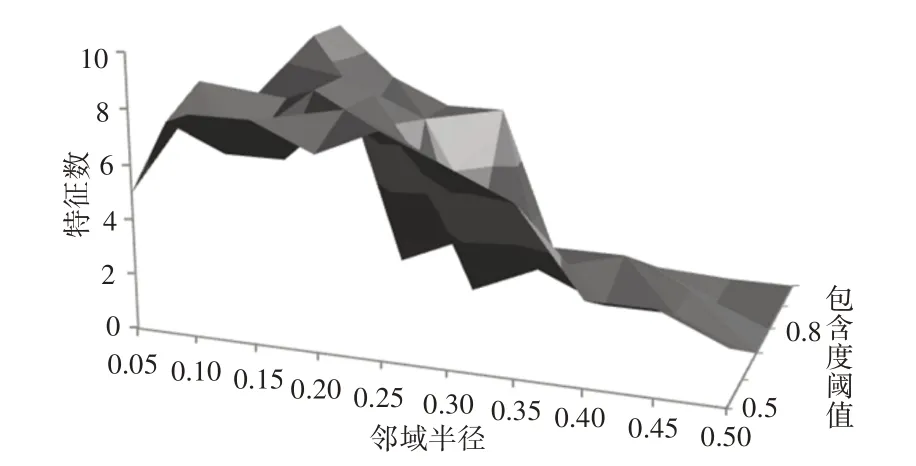
图5 特征个数随δ和β的变化Fig.5 Variation of the Number of Features with δ and β

图6 分类精度随δ和β的变化Fig.6 Variation of Classification Accuracy with δ and β
接着利用RF 算法OOB data 计算误差并对由VPNRS 和FISEN分别选择的特征进行重要度排序,如图7、图8所示。
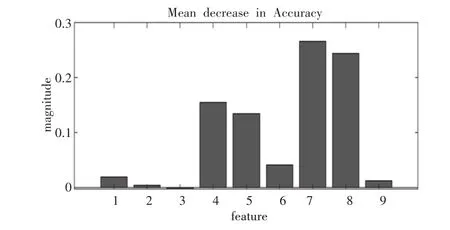
图7 变精度邻域选择特征排序图Fig.7 Sequencing Diagram of Variable Precision Neighborhood Selection Features

图8 模糊熵选择特征排序图Fig.8 Sequencing Diagram of Fuzzy Entropy Selection Features
由图7、图8得出特征重要性排序后需进行特征筛选,为了选择合适的特征数目K,使用序列后向选择方法(SBS)从特征的全集开始搜索,每次从特征子集中去掉一个特征,采用PNN神经网络模型对不同的K值进行试验,通过比较不同的K值对分类准确度的影响来选择最优的K值,实验结果,如图9所示。

图9 特征数对分类精度的影响Fig.9 Influence of Feature Number on Classification Accuracy
从图9可以看出,当VPNRS-RF-PNN和FISEN-RF-PNN模型输入特征个数分别为4和3时,分类精度高于VPNRS-PNN和FISEN-PNN 分类模型,且VPNRS-RF-PNN 分类精度高于FISEN-RF-PNN模型,说明了VPNRS-RF相比单一VPNRS特征选择方法,在输入特征更少的基础上获取更高的分类精度。因此最后作为输入数据特征为中值、最大值、均方根、调和平均数。
3.2.1 基于ELM模型的特征选择验证评估
为了比较特征筛选算法的性能,基于飞机液压系统故障仿真数据集对不同特征选择算法进行试验对比,并采用ELM算法对其进行训练,具体结果,如表2所示。

表2 不同特征选择算法基于ELM模型结果对比Tab.2 Comparison of Results of Different Feature Selection Algorithms Based on ELM Model
从表2 可知,VPNRS-RF 模型分类精度高于WMNRS、GA、PCA、熵权法,虽然PCA和熵权法在特征降维上表现良好,但是并不能较好的保留数据信息。表明了VPNRS-RF特征选择方法相比应用于液压系统中传统单一的GA、PCA、熵权法等方法,不仅可以减少计算量,去除冗余特征,而且可以提高分类准确率。
3.3 OS-ELM液压系统故障识别
OS-ELM故障诊断模型需要对一些参数进行人为的选择,不同参数的选取会对诊断精度和算法性能产生影响。
3.3.1 OS-ELM隐含层神经元及激活函数的选取
故障样本的分配、隐含层神经元、激活函数的选取会对故障诊断算法的训练时间和诊断精度产生一定的影响,因此,分别采用样本比例为4:1、3:2、1:1对OSELM隐含层神经元个数和激活函数进行分析结果,如图10~图12所示。

图10 诊断准确率随OS-ELM 网络神经元数量的变化Fig.10 The Variation of Diagnostic Accuracy with the Number of Neurons in OS-ELM Network
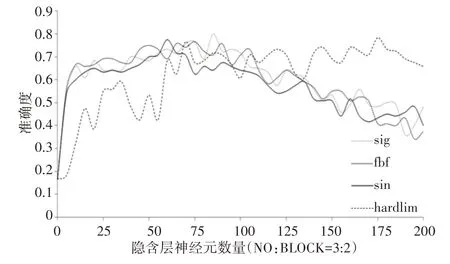
图11 诊断准确率随OS-ELM 网络神经元数量的变化Fig.11 The Variation of Diagnostic Accuracy with the Number of Neurons in OS-ELM Network
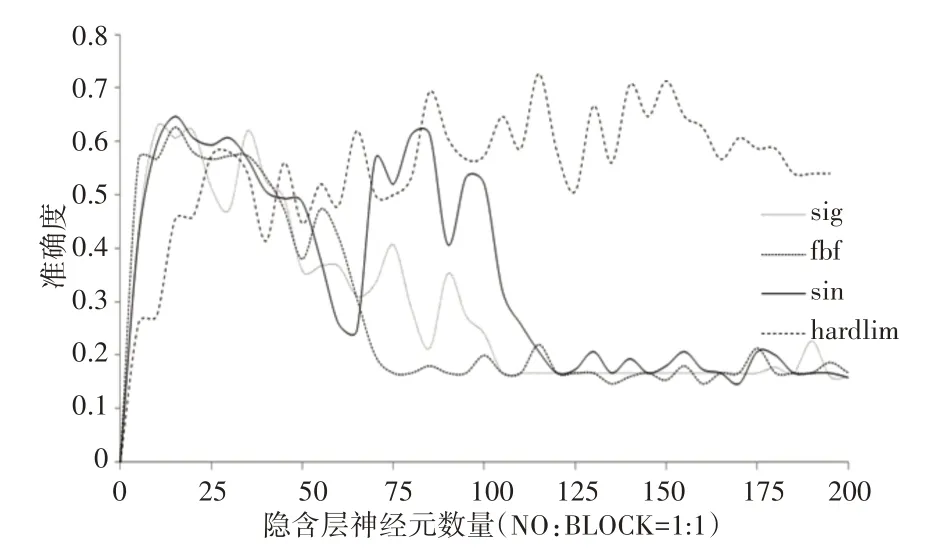
图12 诊断准确率随OS-ELM 网络神经元数量的变化Fig.12 The Variation of Diagnostic Accuracy with the Number of Neurons in OS-ELM Network
从图10~图12可知,在不同故障样本比例下,四种激活函数的诊断准确率随着OS-ELM网络神经元数量的增加呈现出先增大后减小的趋势。其中,当样本比例大于1,且神经元数量较少时,隐含层激活函数选取rb(f)或sig()函数,诊断准确率较高;当神经元数量较多时,选取hardlim()函数较好。
经过飞机起落架收放系统仿真数据分析,OS-ELM网络各参数设置为:N0:BLOCK=4:1,nHiddenNeurons=80,ActivationFunc‐tion=’rbf’。
3.3.2 故障诊断结果分析对比
为验证OS-ELM 故障诊断方法的稳定有效性,选取PNN、ELM、C4.5三种分类模型进行对比,均采用VPNRS-RF约简后的数据作为模型输入结果,如表3所示。

表3 不同模型的故障识别对比Tab.3 Comparison of Fault Identification of Different Models
从表3可以看出,OSELM模型的识别准确率最高且OS-ELM明显优于ELM、PNN、C4.5模型,说明了OSELM模型具有较好的精度和泛化能力。因此VPNRS-RF-OSELM 模型在飞机液压系统故障诊断中可达到理想的效果。
4 结论
这里采用VPNRS-RF-OSELM故障诊断模型,利用变精度邻域和模糊熵分别对原始特征集合进行属性约简,然后用RF对约简后的特征进行重要度排序,选择最优的特征个数,最后利用OS-ELM算法构建飞机液压系统故障检测模型。所采用的特征选择算法相比WMNRS、GA、PCA等特征选择算法精确度更高,因此,在模型对飞机液压系统故障诊断时,应用VPNRS-RF特征选择的OS-ELM模型相比于其他特征选择算法和分类模型在分类精确度上具有一定优势。
猜你喜欢
吉林大学学报(理学版)(2020年3期)2020-05-29
成都信息工程大学学报(2019年2期)2019-08-28
自动化学报(2018年7期)2018-08-20
自动化学报(2018年2期)2018-04-12
成都信息工程大学学报(2017年1期)2017-07-21
电子制作(2017年23期)2017-02-02
周口师范学院学报(2016年5期)2016-10-17
西北工业大学学报(2015年4期)2016-01-19
振动工程学报(2014年4期)2014-03-01
计算机工程(2014年6期)2014-02-28
