
钢拱架铰接孔视觉定位方法研究
2024-02-29 09:24朱国力陈向阳彭丹丹
机械设计与制造 2024年2期
黄 海,朱国力,陈向阳,彭丹丹
(华中科技大学机械科学与工程学院,湖北 武汉 430074)
1 引言
岩石隧道掘进机(Tunnel Boring Machine,简称TBM)是指在常压情况下全断面开挖岩石的刀盘式机头掘进机,是集掘进、出渣、支护等功能为一体的隧道掘进大型复杂成套设备[1]。TBM掘进过程中,快速地将弧形钢拱架拼接成环,对隧道围岩进行支护,防止坍塌事故的发生是至关重要的[2]。然而目前钢拱架仍然由人工搬运对准拼接,存在拼接效率低、支护不及时等问题。随着我国工业自动化的不断发展,传统人工拼接方法已无法满足工业需求。机器视觉技术是一种利用相机代替人眼进行检测的技术,具有非接触性、精度高、速度快等优点,目前在工业方面已有广泛应用[3-4]。文献[5]利用机器视觉技术建立了工件识别系统,对零件进行图像采集与处理,识别零件形状特征以实现零件的分拣工作;文献[6]通过图像形态学处理和边缘检测,提取轴类零件的轮廓特征,搭建了轴类零件定位与测量系统;文献[7]运用改进的形态学梯度滤波算子和灰度矩法对板料边缘进行定位,计算板料偏移量,提高了自动裁切机的精度;文献[8]对铆接薄板孔组视觉测量方法进行了研究,通过阈值分割、感兴趣区域提取等处理,实现了孔组几何参数的计算。
在空间圆定位方面,文献[9]证明了空间圆透视投影到图像上会形成一个椭圆,但是椭圆中心并不是空间圆圆心的对应投影点。针对此问题,文献[10]利用极线约束和顺序一致性原则进行左右图像椭圆边缘点的匹配,利用双目视觉重建空间圆上多个边缘点,并通过Levenberg-Marquardt 非线性最优化方法拟合得到空间圆表达式;文献[11]利用同心圆模型对圆心坐标进行补偿,在已知内外圆环半径情况下,根据交比不变性和直线不变性求得空间圆圆心实际投影点;文献[12]在椭圆上找到两条特殊弦,根据椭圆锥空间几何性质,推导出空间圆圆心和法向量的封闭解,但是该方法存在双重解问题。
结合钢拱架实际结构,首先利用图像处理提取钢拱架铰接孔轮廓特征,然后通过空间几何关系得到铰接孔圆心在图像上的实际投影点,最后根据双目视觉成像模型,计算铰接孔圆心的空间坐标,实现钢拱架铰接孔的精确定位,帮助机械手抓取钢拱架进行精准拼接,实现钢拱架自动化拼接成环。
2 铰接孔特征提取
钢拱架自动化拼接过程中,主要通过机械手抓取左右两钢拱架往中间平移靠近,直至左右两钢拱架上的铰接孔对准为止。因此以钢拱架铰接孔进行定位,用左右两相机拍摄钢拱架拼接段图像,通过模板匹配找到铰接孔感兴趣区域,接着对感兴趣区域图像进行二值化、边缘检测、轮廓连接、拟合椭圆等处理,提取得到铰接孔轮廓特征。
2.1 模板匹配
机械手抓取左右两钢拱架从两端往中间靠近,为保证拼接过程中相机始终能够拍摄到左右两铰接孔,需设置一个较大的视野范围。因此,铰接孔只占实际采集图像的一部分,需对铰接孔进行初定位,找到感兴趣区域,以便进一步处理。模板匹配是一种在原图中寻找与模板图像类似区域的方法,这里采用基于灰度的归一化相关系数匹配法:
式中:R(x,y)—匹配程度;
T(x,y)—模板图像;
(Ix,y)—相机采集图像;
(w,h)—模板图像尺寸。
首先根据铰接孔的形状特征和灰度特征,制作出模板图像,如图1(a)所示。此处只需要对铰接孔进行初定位,为提高模板匹配速度,将原图和模板图像均缩小为原尺寸的1/4,计算原图上每个像素位置的匹配程度R(x,y),找到匹配程度最高的两个位置,即为左右两铰接孔所在位置。以这两个位置为基准,设定一定范围自动框选得到感兴趣区域图像,实现两铰接孔的初定位效果,如图1(b)所示。

图1 模板匹配结果Fig.1 Result of Template Matching
2.2 图像二值化
实际铰接孔表面加工粗糙,凹凸不平,且孔内背景复杂,为防止后续边缘检测生成过多干扰边缘,需对感兴趣区域进行二值化处理。同时为了消除光照影响,设计了一种自适应阈值计算方法。根据铰接孔表面比孔内灰度值更高,且铰接孔表面面积与感兴趣区域总面积之比大致为一定值k的实际情况,统计感兴趣区域图像的灰度直方图,如图2(a)所示。得到每个灰度值i对应的像素数Ni,设感兴趣区域图像总像素数为S,通过计数排序算法计算自适应阈值T如式(2)。利用该阈值,对感兴趣区域图像进行二值化处理,效果,如图2(b)所示。
2.3 轮廓特征提取
目前边缘检测算法的研究已较为成熟,常用算法有Roberts、Prewitt、Sobel、Canny 等,其中,Canny 算法检测出的边缘效果较好。利用Canny算法对二值图像进行边缘检测,将检测出的相邻边缘点连接成轮廓,如图3(a)所示。实际铰接孔是圆孔形,但是由于相机成像平面与铰接孔表面存在一定角度,铰接孔投影到图像上会呈椭圆形。所以根据轮廓长度筛选出铰接孔轮廓后,用最小二乘法拟合成椭圆,得到椭圆方程表达式如式(3),椭圆拟合效果,如图3(b)所示。
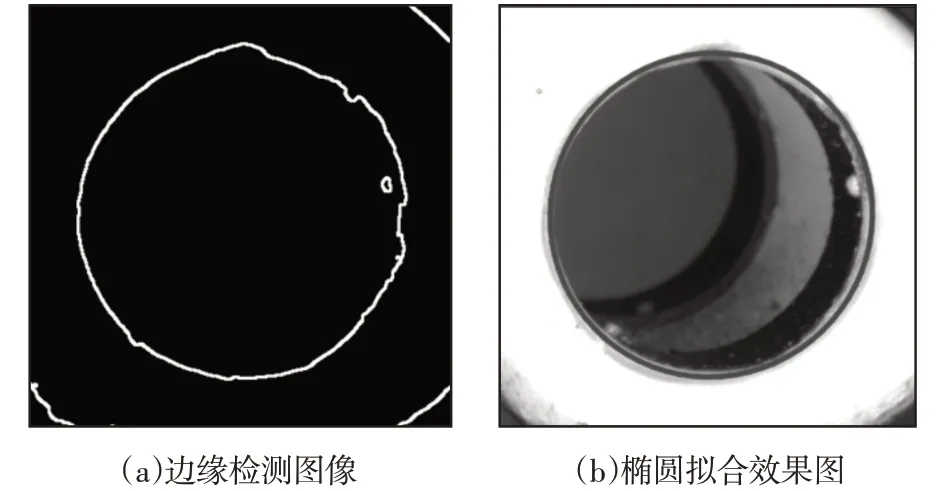
图3 铰接孔轮廓特征提取Fig.3 Contour Feature Detection
3 空间圆圆心精确定位
空间圆经过透视投影后在图像上形成一个椭圆,但是椭圆中心和空间圆圆心并非对应关系。在参考文献[12]的基础上进行改进,通过双目视觉解决了空间圆平面法向量计算结果存在双重解的问题,并利用消影线和椭圆参数矩阵计算得到空间圆圆心的实际投影点。
3.1 空间圆平面法向量计算
为获取空间圆圆心实际投影点,首先需要计算空间圆平面的法向量。通过图像处理提取到左右图像中铰接孔椭圆轮廓特征,将椭圆轮廓进行离散化处理,得到椭圆轮廓点的像素坐标。设相机光心为点G,遍历椭圆轮廓点,找到点p、q,使得∠pGq对应最大顶点角。作一平面Gbc,该平面垂直于平面Gpq,且平分∠pGq,平面Gbc与椭圆轮廓的交点为点b和点c,如图4所示。根据参考文献[12],空间圆平面的法向量计算公式,如式(4)所示。
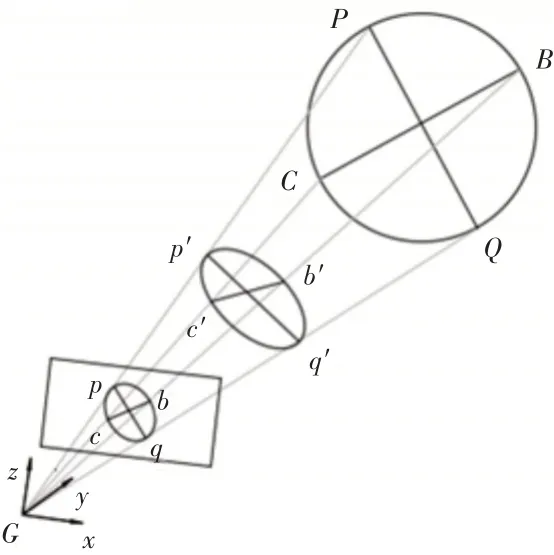
图4 空间圆透视投影示意图Fig.4 Perspective Projection of Circle
式中:n1,n2—空间圆平面法向量的双重解,设f为镜头焦距,则up’、ub’可由式(5)计算。
利用双目视觉,左相机图像可得到双重解nl1、nl2,右相机图像可得到双重解nr1、nr2,其中,各有一个正确法向量,但由于存在误差,两个正确法向量不会完全相等。计算左右图像法向量之间的夹角,如式(6)所示。
找出θ1、θ2、θ3、θ4之中的最小值θmin,θmin所对应的法向量nl、nr即为左右图像正确法向量,从而解决了空间圆平面法向量双重解的问题。
3.2 空间圆圆心坐标计算
空间中的平行平面于无穷远处相交,其交线在图像上的投影即为该平面的消影线。通过相机标定得到相机的内参矩阵M,空间圆平面在相机坐标系下的消影线L计算公式,如式(7)所示:
根据铰接孔投影椭圆的方程表达式(3),定义该椭圆方程的参数矩阵w为:
则空间圆圆心在图像上的实际投影点o坐标为[13]:
分别计算出空间圆圆心在左右相机上的实际投影点ol和or,利用双目视觉成像模型计算出空间圆圆心的世界坐标,实现空间圆圆心的精确定位。
4 实验验证
为验证本铰接孔定位方法的精度和有效性,搭建了铰接孔视觉测量系统,如图5所示。视觉测量系统由相机、镜头、光源和计算机组成,其中工业相机型号为大恒水星系列MER-1220-9GM,分辨率为4024×3036 Pixels,帧率为9 Fps;镜头型号为Computar V1628-MPY,焦距为16mm;光源为白色漫反射条形光。钢拱架放在移动平台上,该移动平台可精确测量出物体移动距离。实验的计算机配置为:Inter core i7-9750H,Window 10 操作系统,64位,Microsoft Visual Studio 2017,OpenCV343。

图5 视觉测量系统Fig.5 Visual Measurement System
将左右钢拱架固定在移动平台上,利用本铰接孔定位方法计算得到左右钢拱架铰接孔圆心世界坐标,平行移动该平台4mm,再次计算左右钢拱架铰接孔圆心世界坐标,从而得到铰接孔圆心的移动距离,重复移动10次,与平台移动距离进行对比。然后分别移动8mm、12mm、16mm,重复以上实验过程,铰接孔圆心移动距离测量结果,如图6所示。左铰接孔测量误差,如表1所示。右铰接孔测量误差,如表2所示。由实验结果可知,左右钢拱架上的铰接孔均能够稳定的检测得到,并且可计算出两铰接孔圆心的空间坐标;铰接孔移动距离测量结果均在实际移动距离附近上下波动,波动范围为±0.2mm以内;铰接孔圆心移动距离测量结果的相对误差在0.3%以内,实现了钢拱架铰接孔的高精度定位。
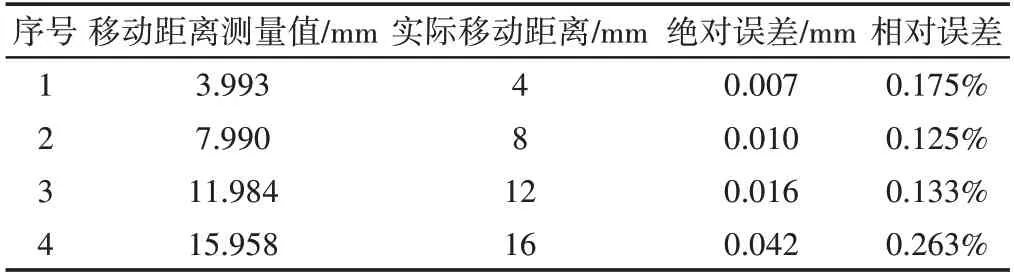
表1 左铰接孔圆心移动距离测量误差Tab.1 Moving Distance Measurement Error of Left Hinged Hole Center
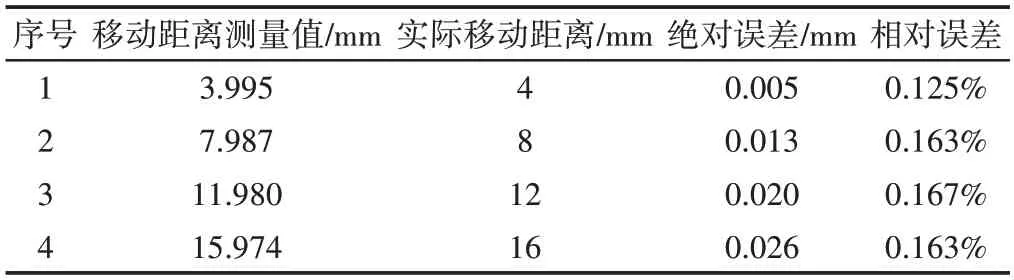
表2 右铰接孔圆心移动距离测量误差Tab.2 Moving Distance Measurement Error of Right Hinged Hole Center
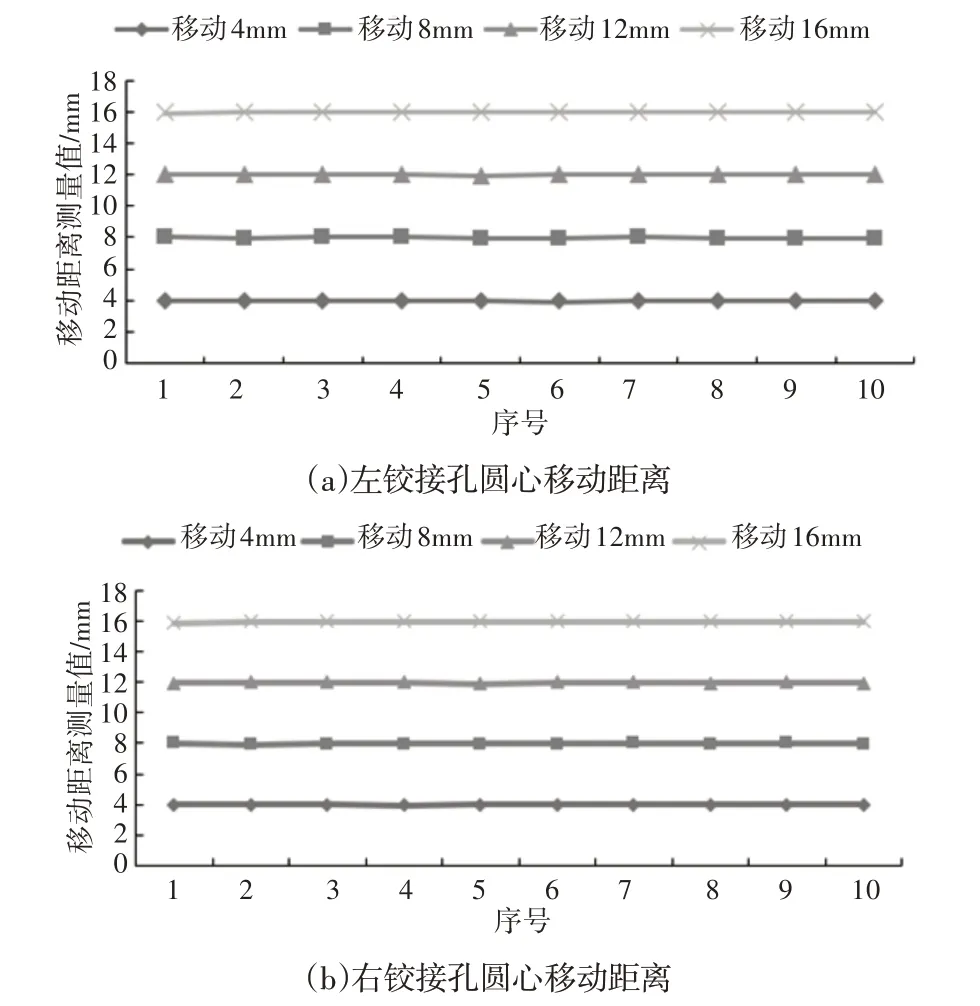
图6 实验测量结果Fig.6 Results of Experimental Measurement
5 结论
针对钢拱架自动化拼接需要对铰接孔进行定位的实际需求,提出了一种基于双目视觉的钢拱架铰接孔定位方法。首先设计了钢拱架铰接孔特征提取的图像处理方法,包括模板匹配、二值化、轮廓提取、椭圆拟合等步骤;然后根据空间圆的透视投影性质,利用双目视觉解决了空间圆平面法向量计算存在双重解的问题;最后研究了空间圆圆心在图像中的实际投影点计算方法,并基于双目视觉成像模型计算铰接孔圆心的空间坐标。实验结果表明,该钢拱架铰接孔定位方法稳定性好,且定位精度可达±0.2mm,实现了钢拱架铰接孔的高精度定位,满足实际作业需求,可为钢拱架自动化拼接提供技术支撑。
猜你喜欢
福建中学数学(2023年5期)2024-01-25
娃娃乐园·综合智能(2022年8期)2022-07-28
装备制造技术(2020年1期)2020-12-25
制造技术与机床(2019年11期)2019-12-04
作文成功之路·小学版(2019年8期)2019-09-18
都市生活(2019年1期)2019-05-04
中等数学(2018年1期)2018-08-01
小学生作文(低年级适用)(2017年12期)2017-02-06
计算机工程(2015年4期)2015-07-05
数学大世界·初中生辅导版(2010年2期)2010-03-08
