
一种艾灸装置的结构设计及支撑座的优化设计
2024-02-29 09:24刘宁波
机械设计与制造 2024年2期
徐 新,邓 斌,刘宁波
(1.西南交通大学先进驱动节能技术教育部工程研究中心,四川 成都 610031;2.海军航空大学信息融合研究所,山东 烟台 264000)
1 引言
如今,艾灸[1]已普及到百姓人家,遍布大街小巷。人人均可在理疗店甚至在家进行艾灸。但是在艾灸装备领域始终存在自动化程度不高、艾灸温度控制不精确等问题。因此人们目前更倾向于人工艾灸,可以自己根据皮肤的温度承受度手动调节艾灸的距离和时间提高艾灸的效果及舒适度。人工艾灸虽效果好,但无法解放双手,艾灸穴位多时间长,长时间的手持艾条,耗时耗力。故适应快速增长的生活高质量的意愿,那么迫切的需要提高艾灸装置的适用性和实用性。
目前,艾灸装置发展有两个方向:第一个方向是向着大型化、集成化、全身各部位同时艾灸的方向发展,文献[2]研制的智能灸疗床,还存在诸多问题,一般在专业人员的指导下使用,不能普及;第二个方向是向着小型化、便携化、单穴位艾灸方向发展。这类艾灸装置多种多样,文献[3]设计的电子艾灸盒,通过滚珠丝杠带动点燃的艾条进行艾灸,但是采用的是DS18B20温度传感器,只能采集到艾灸时的环境温度,温度控制不精准。文献[4]设计了一种新型智能艾灸仪,分析了艾灸的温度场,但通过送风来控制温度,不可控。目前艾灸装置普遍存在不能自动清灰、艾灸温度控制不精确的问题。所以设计一种新的艾灸装置具有一定的时代意义和现实意义。
为了使用方便和成本低减,设计的艾灸装置在保证各方面功能的同时需做到轻量化、保证力学性能不受影响。这就需要对艾灸装置中对质量影响最大的部件艾灸支撑座进行优化设计。传统的优化设计是将各个参数变成设计变量进行优化,但是将每个参数都进行考虑则计算工作量大且效率低下,文献[5-6]通过改变结构进行优化,但没有系统的优化设计方法。文献[7]将影响立式加工中心的几个关键尺寸作为设计变量,对其进行了轻量化优化设计,得到了较好的效果。文献[8]在曲轴结构优化中利用响应面法结合多岛遗传算法得到Pareto 解集,具有很好的工程意义。
针对上述情况,这里欲设计一种既能提高艾灸效率又能降低自身质量的艾灸装置,并以关键部件艾灸支撑座为对象进行多目标的优化。拟定设计变量为艾灸支撑座的三个结构尺寸,利用OSF 方法作为设计变量的试验点的选取方法,再构建神经网络代理模型,最后检验该模型的精度。以艾灸支撑座的质量和最大变形量为多目标优化函数,以最大变形量和最大应力为约束条件,利用多岛遗传算法选取最优解,为其他结构的优化设计提供了参考。
2 艾灸装置结构设计
设计艾灸装置的目的是提高艾灸的自动化程度和效率,因此对艾灸装置的设计要求有:
(1)覆盖人体各个穴位;
(2)实现艾条自动推送;
(3)具有清灰功能;
(4)尽可能质量轻、结构小巧。
基于以上要求设计出的艾灸装置,如图1所示。艾灸装置的工作原理是通过金属定型软管和旋转关节将艾条竖直对准人体将要艾灸的区域,通过推送部件调整艾条与艾灸点皮肤之间的距离,通过模糊PID控制算法改变艾条与艾灸点皮肤之间的距离实现艾灸点皮肤温度的恒温控制,并设计专门的清灰装置在需要清理艾灰时清理艾灰,保证艾灸效果。整个艾灸装置具有结构轻巧、能自动清灰、精准控制艾灸温度等优点。

图1 艾灸装置结构示意图Fig.1 Schematic Diagram of Moxibustion Device Structure
2.1 艾灸装置结构特点
艾灸装置包括艾灸装置本体、清灰装置以及集灰装置。清灰装置和集灰装置从上到下依次设置在艾灸支撑座上,艾灸支撑座上还设有推送部件,艾灸装置本体、清灰装置、集灰装置以及推送部件分别与控制装置电连接。
艾灸装置本体包括:底座、金属定型软管、旋转关节、艾灸支撑座以及艾条推送组件。艾条推送组件的另一端设有艾条。旋转关节为舵机驱动,通过舵机安装座和轴承的连接实现艾灸支撑座的旋转。推送部件是由步进电机驱动,通过同步带传动带动滚珠丝杠运动,艾条通过“Z”字形连杆固定在丝杠螺母上实现直线运动。艾灸装置本体为艾灸的主体功能,通过金属定型软管的粗调整和旋转关节精确调整将艾条竖直对准人体将要艾灸的区域,工作范围可覆盖人体各个穴位,可满足设计要求(1)。推送部件实现艾灸的推送,可满足设计要求(2)。
2.2 清灰功能
清灰装置结构,如图2所示。
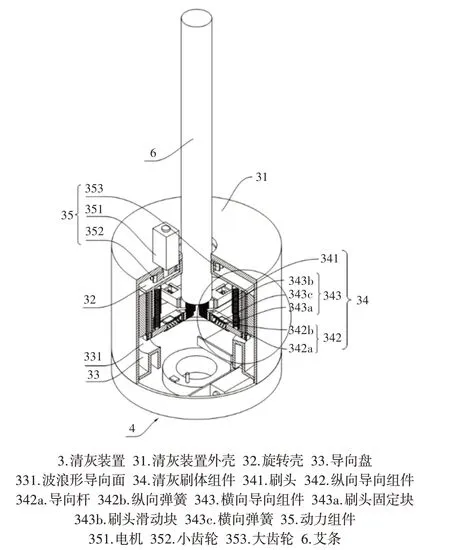
图2 清灰装置结构示意图Fig.2 Schematic Diagram of the Structure of the Cleaning Device
清灰装置用于清理艾灸燃烧端的艾草灰,因此该清灰装置整体设置在外壳下端,艾条在推送部件的带动下可进入清灰装置中进行清灰,在旋转电机的驱动下旋转壳不断转动,刷体组件在旋转的同时还可以在导向盘的波浪形导向面的导向作用不断上下移动,纵向导向组件带动刷头上下移动,横向导向组件带动刷头横向移动,从而对艾条完成多方位清灰,在旋转壳中沿艾条的周向设置多组清灰刷体组件,每组清灰刷体组件采用不同形状的刷头,加强清灰效果;集灰装置用于收集清灰装置清理下来的艾草灰,集灰装置中的滑盖可以在清灰时将集灰装置外壳上供艾条穿出的通孔封闭,避免清灰时,艾草灰从通孔掉落到人体皮肤上,集灰装置内部设有温度传感器,当温度传感器检测到的温度达到设定值时,可判断艾条需要清灰,因此触发控制装置进行清灰操作。
清灰功能只有一个电机驱动,通过各个机械结构的设计,完成艾灸条的清灰操作,满足功能(3)的需求,解决了以往艾灸时需要手动清灰的难题,并且提高了艾灸时的温度控制精度。
2.3 温度控制
艾灸装置装有红外温度传感器、编码器来控制艾灸装置的正常工作。红外传感器1负责检测艾灸点皮肤表面温度,红外传感器2负责检测艾灸燃烧端温度。设定艾灸时的温度,利用传感器1作为反馈,滚珠丝杠为执行机构,在模糊PID算法的控制下调整艾条与艾灸点皮肤之间的距离,达到恒温控制效果。当传感器2检测到艾条燃烧端温度高于设定值,起动清灰功能完成艾灰的清理。因此,通过机械硬件和控制算法的结合,实现了艾灸时的高精度温度控制。
3 基于有限元的艾灸支撑座仿真分析
艾灸支撑座为艾灸推送组件和艾灸清灰集灰组件提供支撑。由于艾灸支撑座为艾灸装置主要的受力部件以及质量最大的部件,因此以艾灸支撑座为研究对象,进行有限元仿真分析,在保证力学性能的基础上实现轻量化以满足上述功能(4)的需求。
3.1 艾灸支撑座有限元模型的建立
利用三维建模软件建立艾灸支撑座实体模型,将凹槽、倒角等结构忽略以方便计算,将模型的各个结构尺寸进行参数化,将具有参数化结构尺寸的模型导入有限元软件进行分析,艾灸支撑座Workbench模型,如图3所示。
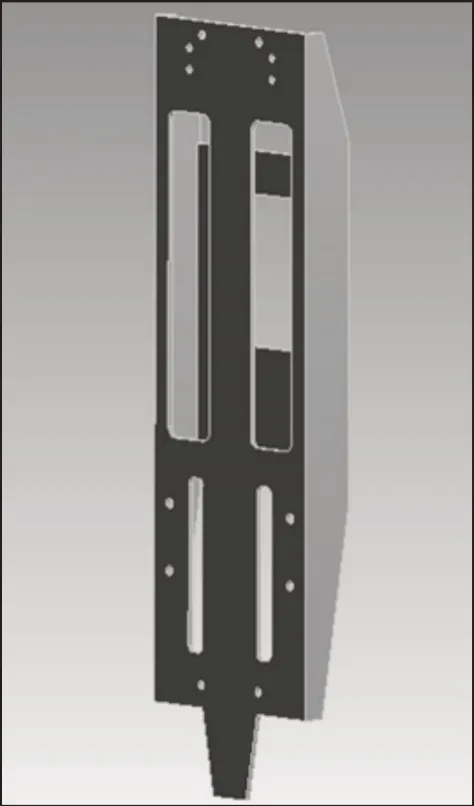
图3 艾灸支撑座Workbench模型Fig.3 Workbench Model of Moxibustion Support Seat
艾灸支撑座以Nylon610为材料,弹性模量为8300MPa,泊松比为0.28,密度为1400kg/m3,屈服强度为68.9MPa。此时,艾灸支撑座的质量0.13643kg。选择通用性较强的四面体网格,网格最小单元尺寸1mm,单元数为1135572个,节点数为706669。
3.2 艾灸支撑座有限元静力学分析
根据使用时极端工况,艾灸支撑座主要有几个力与约束如下:
(1)艾灸清灰上外壳通过螺栓连接在艾灸支撑座的正面,受艾灸清灰组件重力;
(2)步进电机安装座与艾灸支撑座通过螺栓连接,受步进电机及其安装座重力;
(3)艾条推送组件重力;
(4)艾灸清灰时产生的弯矩。
将以上力分别加在艾灸支撑座上,圆柱端固定,对其进行静力学分析,应力图和总变形图,如图4、图5所示。可见,艾灸支撑座在应力出现在背面支撑点的附近,但应力较小,小于标准的10%,满足设计及使用要求;最大变形出现在前端的底部,小于标准值,且考虑实际使用情况,不会对艾灸装置的工作产生较大影响,也满足要求。
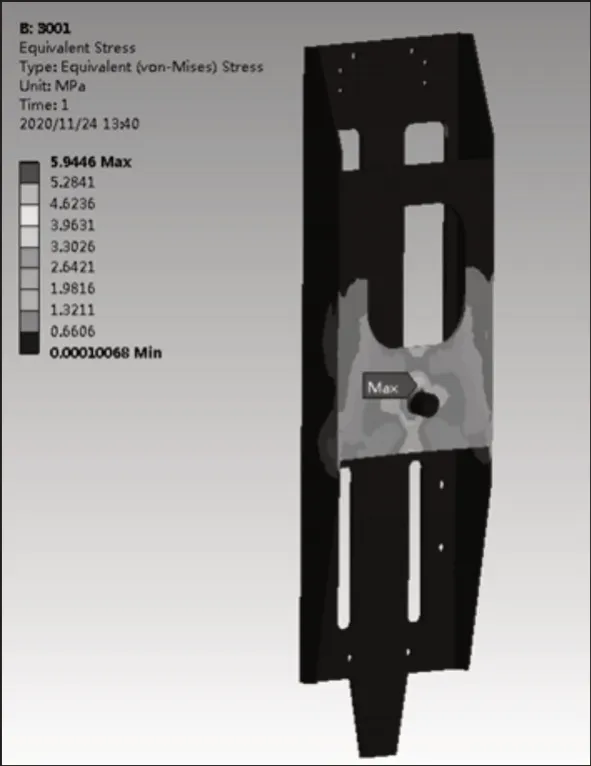
图4 艾灸支撑座应力图Fig.4 Stress Diagram of Moxibustion Support Seat
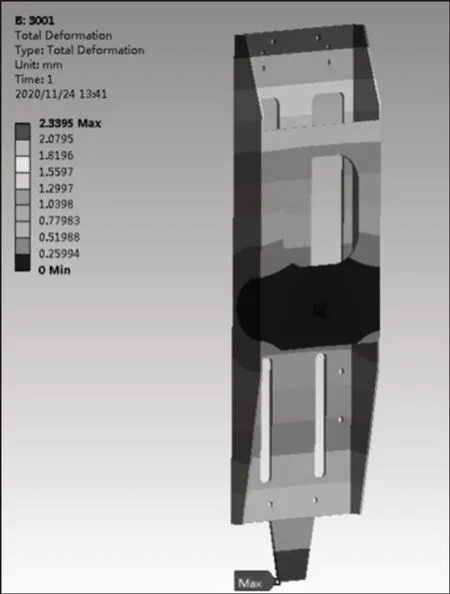
图5 艾灸支撑座总变形图Fig.5 The Total Deformation of the Moxibustion Support Seat
该部件的应力应变结果,如表1所示。
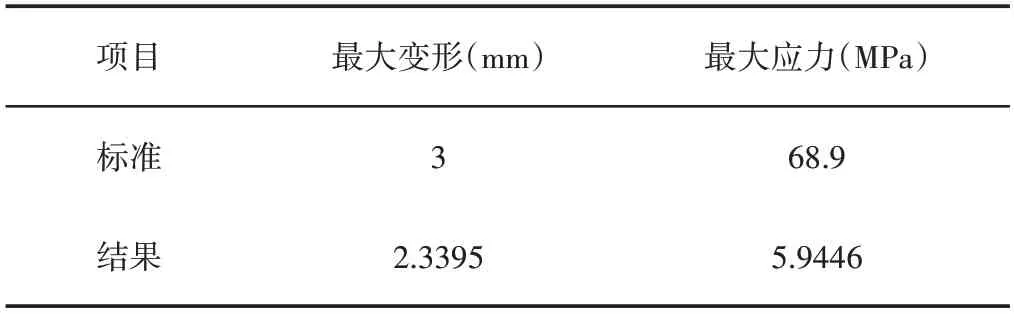
表1 艾灸支撑座的最大变形和最大应力Tab.1 Maximum Deformation and Maximum Stress of Moxibustion Support
4 响应面模型的建立
为了进一步使艾灸装置使用方便和成本低减,需要对影响艾灸装置整体结构性能最大的艾灸支撑座做进一步分析。
响应曲面法(Response Surface Methodology)[9-10]是一种结合数学方法和统计方法的优化方法。为了使艾灸装置轻量化且满足使用需求,在不改变艾灸支撑座的基本结构的前提下,以最大程度减轻质量和减小最大变形量为目标,用响应面法对艾灸支撑座进行优化设计。
对于优化设计来说,一般响应与设计变量之间的关系式是未知的,因此利用响应曲面法得到它们之间的真实函数关系。由于艾灸支撑座三个变量之间对响应不是线性关系,因此使用二次多项式建立拟合函数:
式中:y—目标函数;
xi,xj—设计变量;
β,ε,k—常量。
4.1 选取试验点
试验点的选取对响应面的精度至关重要。本次设计采取Optimal Space-Filling Design(简称OSF)的试验设计方法选取试验点。OSF方法是根据拉丁超立方采样算法进一步优化得到的,有着更为均匀的点空间分布。
相对于一般的CCD(Central Composite Design)算法,OSF 可以以最小的数量获得对设计点的最大洞察,相应的需要更多设计点以免影响响应预测质量。对艾灸支撑座影响较大的3个参数选为设计变量:长方形板厚记录为d1,初始值为2mm;长方形宽度记录为d2,初始值为25mm;上方减重孔宽度记录为d3,初始值为30mm。根据设计经验和实际能利用的空间确定了设计变量的取值范围,如表2 所示。利用OSF 方法计算得到艾灸支撑座设计试验取值,如表3所示。
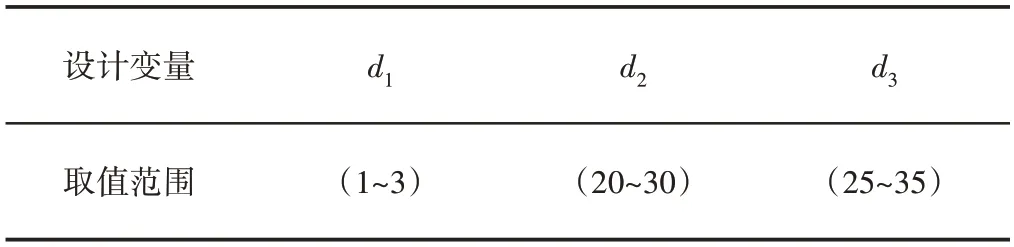
表2 设计变量的取值范围(mm)Tab.2 Value Range of Design Variables(mm)
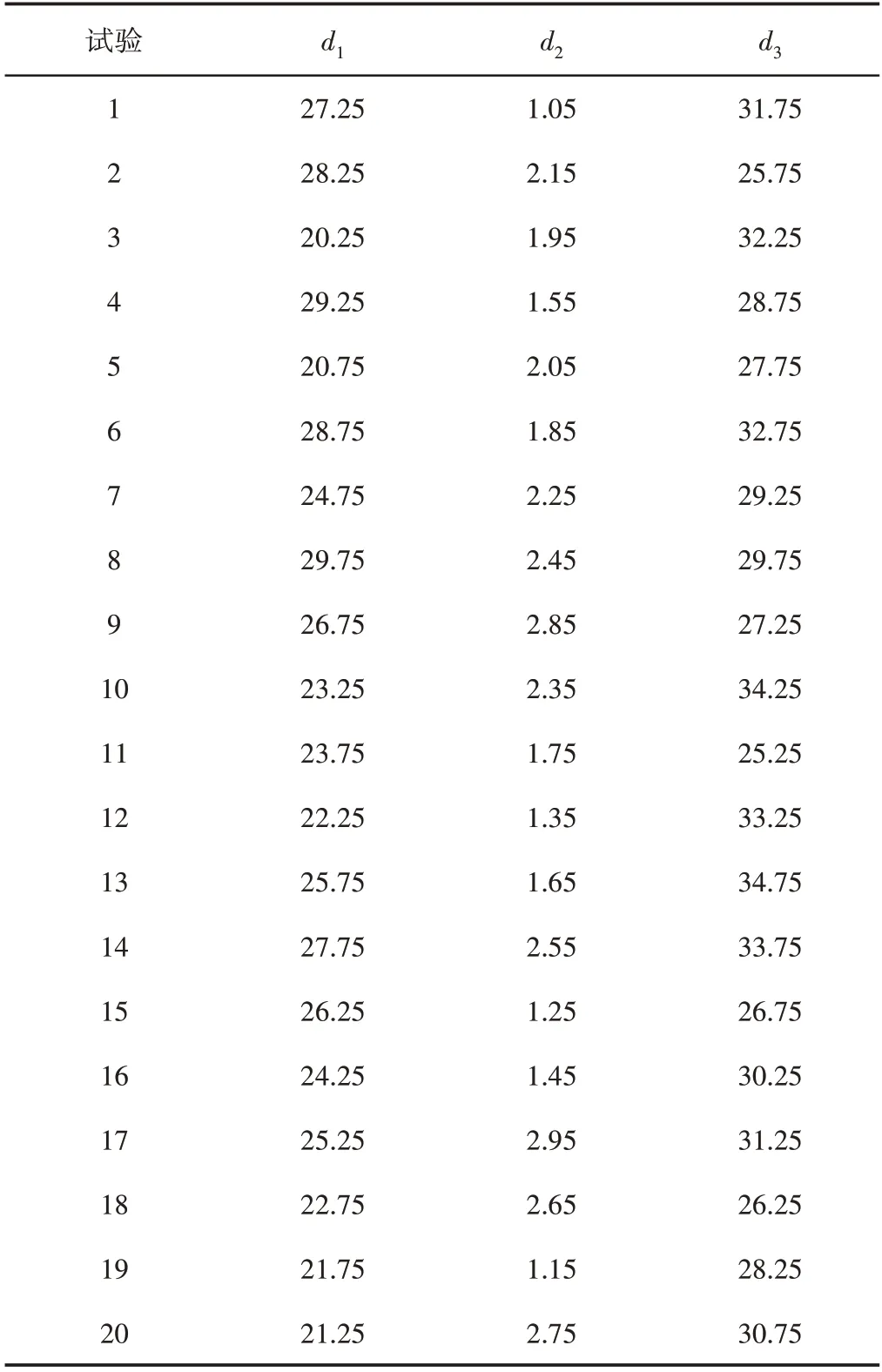
表3 设计变量的设计试验取值(mm)Tab.3 Design Test Values of Design Variables(mm)
4.2 灵敏度分析
以表2所示的艾灸支撑座d1、d2、d3三个参数为影响因素,对艾灸支撑座进行灵敏度分析,如图6所示。
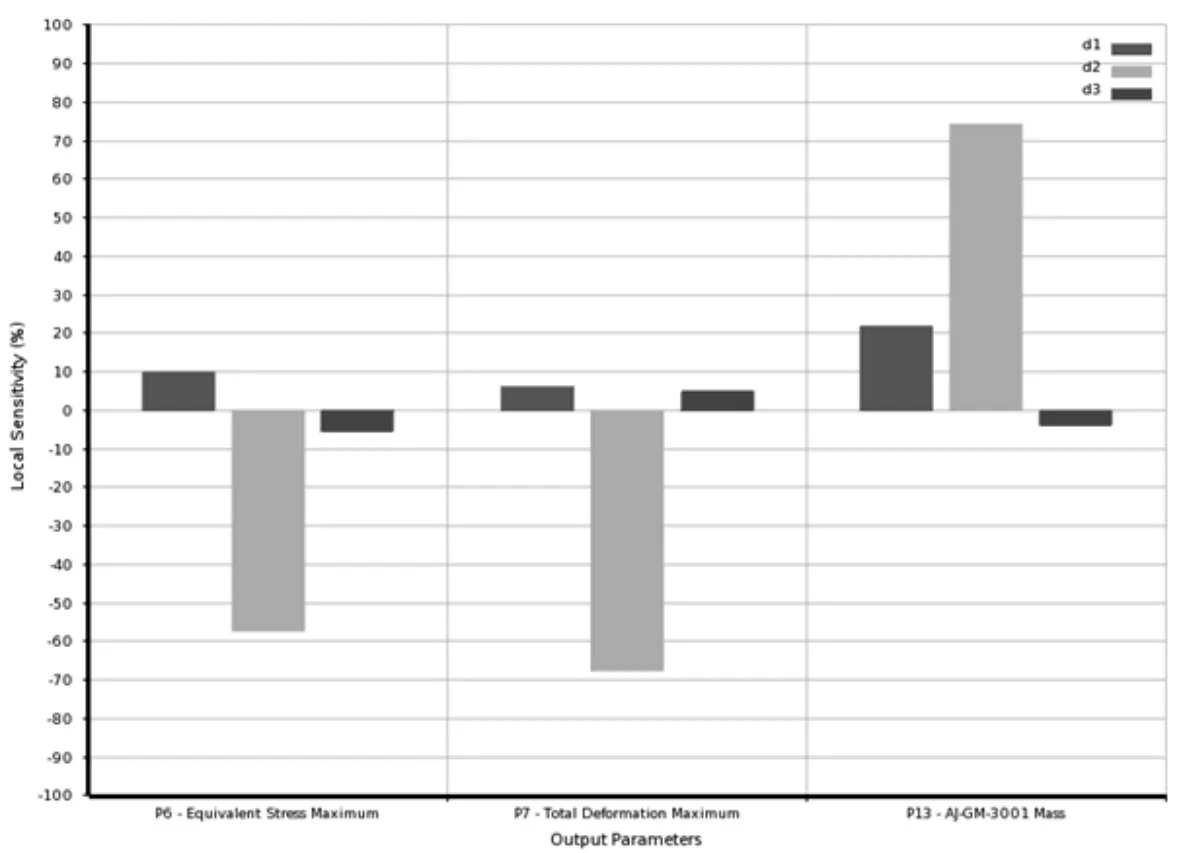
图6 艾灸支撑座灵敏度分析Fig.6 Sensitivity Analysis of Moxibustion Support Base
由图6可知,三个设计变量d1、d2、d3对艾灸支撑座最大变形量、最大位移量、质量的灵敏度分别为10、-58、-6,7、-68、5,22、75、-3。说明三个设计变量对艾灸支撑座的最大变形量、最大位移量、质量均有影响,这三个设计变量的选取具有实际意义。其中,设计变量d2的灵敏度值最大,说明对艾灸支撑座的影响最大。
4.3 神经网络代理模型的构建
径向基函数是形如(zx)=Υ(‖x-u‖)函数,其中,‖x-u‖是向量x与中心μ之间的欧氏距离。径向基神经网络[11]具有结构简洁,很好的解决非线性问题的能力,并且学习速度快等优点。因此,构建了艾灸支撑座结构尺寸与静态特性的径向基神经网络代理模型,如图7所示。
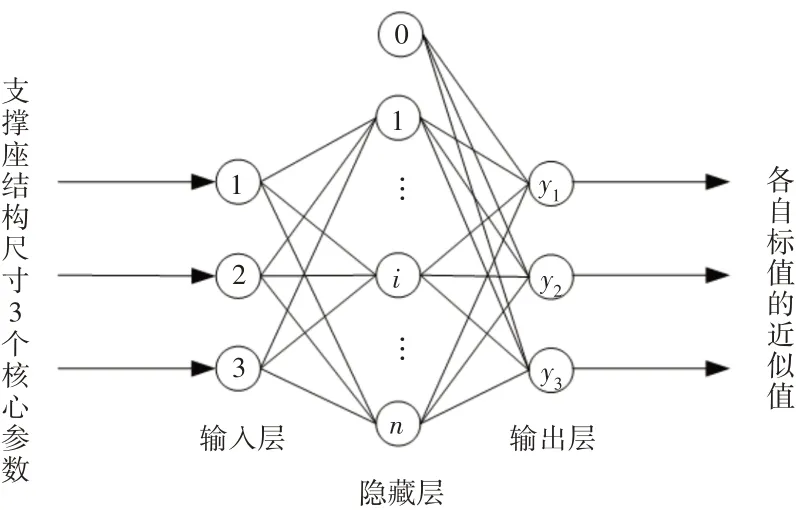
图7 径向基神经网络模型Fig.7 Radial Basis Function Neural Network Model
输出层第k个节点的输出的计算方法如下:
式中:wki—隐含层第i个节点到输出层第k个节点的连接权重;
wk0—输出层第k个节点的偏差项。
径向基神经网络的误差函数为:
式中:yd,k—节点k的期望输出。
径向基神经网络的权值参数可用最小二乘法求解,可将式(2)写成矩阵:
通过式(2)~式(4)即可求得艾灸支撑座质量、最大形变量,最大应力关于结构尺寸的径向基神经网络代理模型。
4.4 精度评价指标
对于神经网络响应面精度的好坏,需要进行检验。一般采用RMSE(均方根差),R(2复相关系数)(修正的复相关系数)来检验。其公式如下:
式中:m—模型验证的样本量;
yi—真实响应值;
—由回归方程得到的观测值;
—真实响应值的均值。
三个评价标准,如表4所示。可得响应面的精度满足要求。
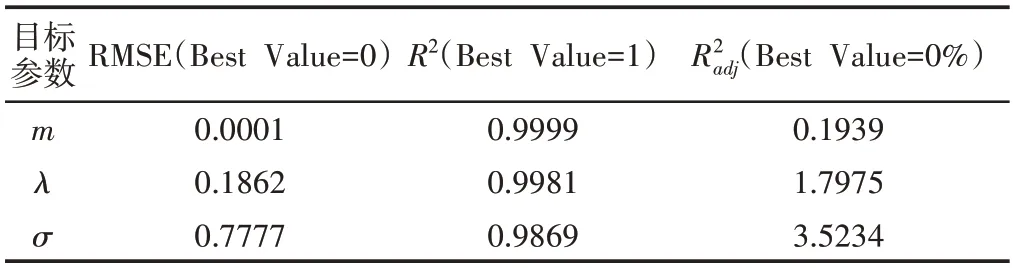
表4 评价标准拟合度值Tab.4 Evaluation Standard Fitness Value
5 基于多岛遗传算法的多目标优化
优化设计的目标是以艾灸支撑座的质量和最大变形量为多目标优化函数,约束条件为最大变形量和最大应力,设计变量为艾灸支撑座的三个结构尺寸,因此构建如下多目标优化的数学模型:
式中:X—决策矢量,X∈Ω,Ω—决策空间;
dmin—设计尺寸变量下限值;
dmax—设计尺寸变量上限值;
m—整体质量;
λ—允许变形量;
λ(X)—最大变形量;
[σ]—许用应力;
σ(X)—最大应力。
在多目标优化过程中无法实现多个目标同时最优,所以通过多目标优化计算求解出多目标优化解集,即Pareto最优解集[12],再通过要求和经验选取最优解。有很多种方法可以选取Pareto最优解,这里采用具有多岛效应的遗传算法对进行优化,该算法可以同时处理多个目标,鲁棒性强。
各个子目标的权重都设为1,初始种群数量设为50,岛屿个数10,最大遗传代数20,交叉概率1.0,变异概率0.01,迁徙率0.5。Pareto解集在经过2000次迭代后得到的结果,如图8所示。得到的最终优化结果,如表5、表6所示。结果表明,利用多岛遗传算法对径向基神经网络代理模型进行优化,质量、最大变形量、最大应力的误差分别为0.026%、5.53%、10.30%,优化精度较为理想。与初始值相比,质量从0.13643kg 下降到0.11595kg,下降了15.01%。最大变形量从2.3395mm 变为2.3613mm 小于3mm,仅仅增加了0.0218mm,对整个艾灸装置的运行没有影响。最大应力从5.9446MPa 上升到6.2052MPa,由于远小于68.9MPa。优化结果满足要求。
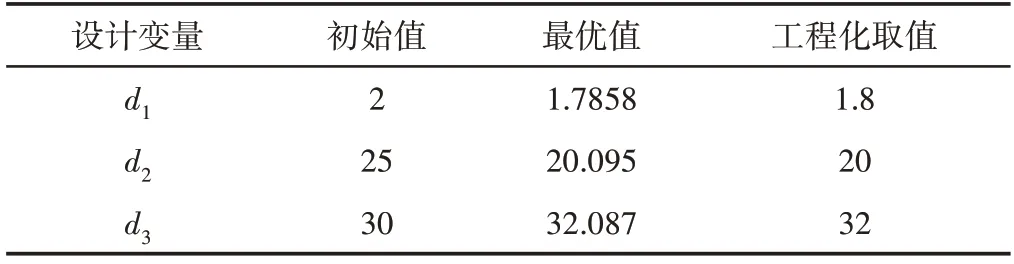
表5 设计变量优化前、后和工程化取值(mm)Tab.5 Design Variables Before,After and Engineering Value of Optimization(mm)
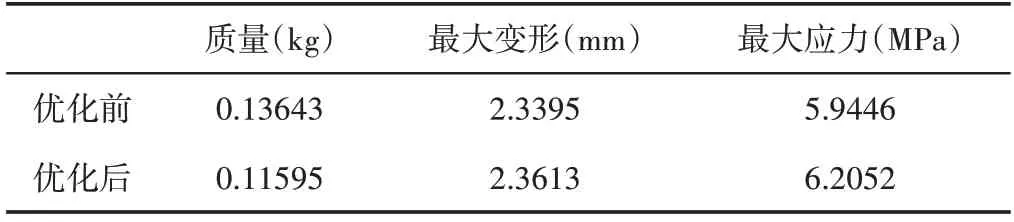
表6 优化前、后结果对比Tab.6 Comparison of Results Before and After Optimization
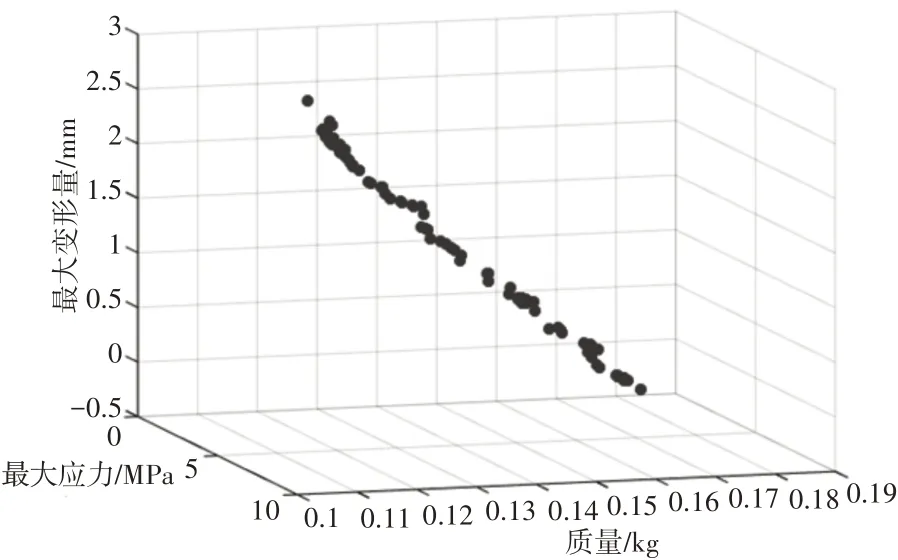
图8 Pareto最优解集Fig.8 Pareto Optimal Solution Set
6 结论
(1)设计了一种结构轻巧、能自动清灰且能精准控制艾灸温度的艾灸装置。具有实用性,能够有效代替人工手动艾灸,省时省力。
(2)对艾灸支撑座的设计优化和分析表明,基于径向基神经网络的艾灸支撑座响应面模型和利用多岛遗传算法的多目标优化设计,质量从0.13643kg 下降到0.11595kg,下降了15.01%,有效降低了支撑座的质量,实现了艾灸装置的轻量化目标,同时保证了力学性能。
(3)该艾灸装置结构的优化成功,为其他艾灸设备的机械结构设计优化提供了理论依据和设计参考。
猜你喜欢
基层中医药(2021年7期)2021-11-02
中国民间疗法(2021年4期)2021-06-09
中国粉体技术(2021年1期)2021-01-04
电子制作(2019年19期)2019-11-23
科技资讯(2019年12期)2019-07-08
基层中医药(2018年7期)2018-12-06
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
中国有色冶金(2015年1期)2015-03-07
海军航空大学学报(2015年4期)2015-02-27
