基于倾角反演的隧道断面变形全方位监测方法
2024-03-01 08:08陈晓斌王风栋吴梦黎王业顺
中南大学学报(自然科学版) 2024年1期
陈晓斌,王风栋,吴梦黎,王业顺
(1.中南大学 土木工程学院,湖南 长沙,410082;2.重载铁路工程结构教育部重点实验室,湖南 长沙,410075)
隧道断面变形是反映隧道健康状况的关键因素[1-4]。传统方法只在某一时刻记录隧道断面特定监测点变形,很难准确定位断面危险点位置并判别潜在的变形趋势,难以满足隧道健康状况评估的需求[5-6]。为了实现整个隧道断面的实时连续监测,基于倾角传感器和无线传感网络的隧道变形监测方法成为当前研究热点[7-9]。20世纪90年代末便有学者利用倾角传感器对隧道变形进行监测。BASSETT等[10]基于电解质式倾角传感器开发了巴塞特收敛系统(Bassett convergence system),并在伦敦地铁有限公司运营隧道中进行了试验验证。该系统主要由若干个带有倾角传感器的观测臂组成,使用时,需将观测臂首尾相连安装到隧道断面上。除此之外,ARIZNAVARRETA-FERNÁNDEZ等[11]采用与巴塞特系统相似的原理开发了CANG(convergence by means of angular sensors)系统,并在双车道公路隧道中进行了试运行。随着MEMS(micro-electro-mechanical system)技术和无线传感网络技术的发展,基于MEMS倾角传感器和无线传感网络的新型监测方法开始用于隧道变形监测。BENNETT等[12]使用倾角传感器和裂缝计对伦敦地铁隧道变形进行了长期监测。WANG等[13-14]采用无线倾角传感器对上海地铁隧道的水平和纵向收敛变形进行了监测。LI等[15]在隧道断面顶部布设倾角传感器,监测了纵向沉降。同时,相关学者提出了多种基于倾角的变形计算方法。嵇中[16]假定隧道断面变形为椭圆形,通过公式拟合的方法得到了盾构隧道收敛变形的计算公式。HUANG等[17-18]通过定义“最优测量点”,采用考虑管片变形的相对不转动点法对隧道收敛变形进行计算。王明卓[19]通过建立数值模型,利用理论和数值拟合的方法建立了变形和倾角变化之间的关系。WANG等[5,14]则采用解析方法提出基于倾角传感的盾构隧道收敛计算方法,并利用误差反演算法得到最优安装位置。
目前,提出的多种倾角-变形算法主要是用于计算特定监测点变形,在准确计算隧道断面全方位变形(隧道断面任意极角位置变形)方面还存在一些不足。巴塞特系统、CANG系统虽然可以实现全方位监测,但需要大量的辅助设备,占用工作空间大,无法体现倾角传感器体积小、易于安装的优势。为了充分发挥倾角传感器的优势,实现对隧道断面全方位变形的实时连续监测,本文提出一种新的基于倾角反演的隧道变形监测方法,主要研究内容包括:通过分析隧道变形与倾角之间的关系,推导隧道倾角-变形算法;开展倾角-变形算法误差分析,增设假定约束条件,提出算法修正公式;建立三维有限差分数值模型和室内试验模型,通过数值模拟和室内试验的方式验证算法的正确性,通过误差分析讨论其适应性,为实际工程应用提供依据和指导。
1 基于倾角的隧道变形算法
1.1 坐标系选取
推导隧道倾角-变形算法时,首先需要选取合适的坐标系来定义隧道各点的坐标信息。常见隧道结构一般由仰拱和上部拱形结构组成,两者的轮廓曲线均呈弧形。隧道仰拱的主要作用是将上部荷载传递给下部土体,同时抵抗下部土体的隆起,在实际监测中,一般较少对仰拱进行监测。因此,本文在研究隧道变形过程中也仅针对上部拱形结构。同时,考虑到隧道拱脚的变形较小,将上部拱形结构两底端近似看作固定约束[20]。
隧道上部拱形结构的轮廓曲线上存在切线斜率无穷大的点,即存在倾角为90°的点。当选用常用的直角坐标系定义位置时,对斜率无穷大的点难以处理,同时也会存在同一x坐标对应多个y坐标的问题即多值问题。为避免上述问题,采用极坐标系来定义位置坐标。如图1所示,以2个拱脚连线的中点作为坐标原点,记为极点O,从极点向右侧拱脚引出1条射线作为极轴,记为极轴OX,以逆时针旋转为正,建立极坐标系。隧道轮廓曲线上各点的位置坐标可以用极角φ和与其对应的极径r唯一表示,记为P(φ,r)。

图1 坐标系选取示意图Fig.1 Diagram of coordinate system selection
1.2 倾角-变形算法推导
采用极坐标表示隧道各点的位置,此时,隧道变形情况可以用各点的极径变化量Δr表示,Δr越大,该点的变形量越大。利用倾角计算隧道变形时,需要建立倾角与变形之间的关系,通过已知倾角推算与之唯一对应的变形值,用数学表达式表示为
式中:θ为隧道监测点的倾角;Δr为隧道监测点的变形量。下面推导Δr与θ的具体关系式。
为了便于分析,将隧道轮廓曲线的极角区间分为n个小区间,取其中1个小区间进行分析。隧道分段变形几何关系如图2所示。设曲线AB为第i个小区间[φi-1,φi]所对应的曲线分段,曲线A′B′为对应变形后的曲线分段。

图2 隧道分段变形几何关系Fig.2 Deformation geometry relationship of tunnel segments
Pi(φi,ri)和Pi-1(φi-1,ri-1)是曲线分段的端点,对于变形前后的曲线分段,存在有函数关系Ri(φ)使得r=Ri(φ),φ∊[φi-1,φi]始终成立。但Ri(φ)的具体表达式并不明确,可以基于曲线插值的思想,构造插值函数ri(φ)近似代替Ri(φ),并使ri(φ)经过端点Pi和Pi-1。任意曲线都可以构造插值函数去近似代替实际曲线,各函数组成插值函数r(φ)∊[0°,180°]。则隧道变形可以近似表示为
式中:Δr为隧道监测点的变形量;r(φ)为变形后曲线的极径;rc(φ)为曲线的初始极径。
假设函数ri(φ)在区间[φi-1,φi]内满足二阶连续,即函数图像为光滑连续的曲线。以多项式为基函数构造ri(φ):
式中:aik为多项式的系数。式(3)的一阶和二阶导数r′i(φ)和r″i(φ)可以表示为:
如图2所示第i个分段曲线,其极角区间为[φi-1,φi],为方便计算,不妨将原函数进行平移,设变量s=φ-φi-1,同时令si=φi-φi-1,则平移后的函数区间变为[0,si]。分段端点Pi和Pi-1的极径为ri和ri-1,ri(φ)在端点的一阶导数值用r′i和r′i-1表示,可以得到以下关系:
将式(3)、(4)、(6)联立可以得到:
同理,对于相邻的第i+1段曲线,可以构造函数ri+1(φ),其中φ∊[0,si+1]。2个函数在其区间内均满足二阶连续,则在端点处有
将式(8)与式(5)联立并将式(7)代入得
式(9)是关于r、r′的方程,由于采用倾角θ进行隧道变形监测,隧道各点的r和r′为未知量,要求解式(9)需要建立倾角θ与r、r′的关系。
极坐标系与直角坐标系的转换关系为
此时,对于倾角θ,有
再由三角函数公式可得
将式(11)代入式(12)并化简得
式(13)表征了倾角θ与r、r′的关系。将式(13)代入式(9)并化简得
其中:
式(14)是关于r的方程组,求解前还需要2个边界条件。设隧道2个拱脚满足
式中:R0为隧道右侧拱脚的极径;Rn为隧道左侧拱脚的极径。R0与Rn为已知量,可以通过1次测量或者设计图获得。在将上部拱形结构看作两端固定约束的情况下,可以认为R0与Rn为不变量。将式(15)与式(14)联立为矩阵形式:
为表示方便,上式可以简写成
式中:A为系数矩阵,由隧道轮廓曲线各点的倾角θ求得;R为变量矩阵,是隧道各点极径r组成的一维数组;B为结果矩阵。
式(17)是关于极径r的方程组,根据矩阵的基本运算法则可以求得变形后隧道各点的极径:
同理,可以求得隧道初始极径:
由此可以计算出隧道各点的变形量:
式中:ΔR为隧道各点变形量组成的一维数组。
式(20)即为倾角θ与隧道变形的关系,将实时获得的隧道各监测点的倾角代入式(20)便可以计算出隧道变形量。
将式(18)和式(19)求得的极径代入式(7)可以得到系数ai1、ai2、ai3、ai4,将各系数代入式(3)可以得到隧道变形前后的隧道曲线rc(φ)和r(φ),再利用式(2)即可求得隧道断面曲线任意极角位置的变形量Δr,从而实现对隧道上部拱形结构的全方位变形监测。
1.3 监测点极角修正
在实际应用中,为考虑成本,一般使用便携式小型倾角传感器对隧道若干个监测点倾角进行监测,这可能造成计算误差。计算误差一方面来源于倾角传感器本身结构,其输出的倾角是传感器所在直线的倾角,与实际监测点的倾角之间存在一定误差。但倾角传感器的长度一般为10~20 cm,相对于隧道周长,传感器长度小,因而这类误差影响较小。另一方面,在隧道变形过程中,传感器伴随隧道一起发生位置变动,但由于隧道各点的位移方向并非均指向极点,会促使变形前后的监测点极角发生变化,如图3所示。
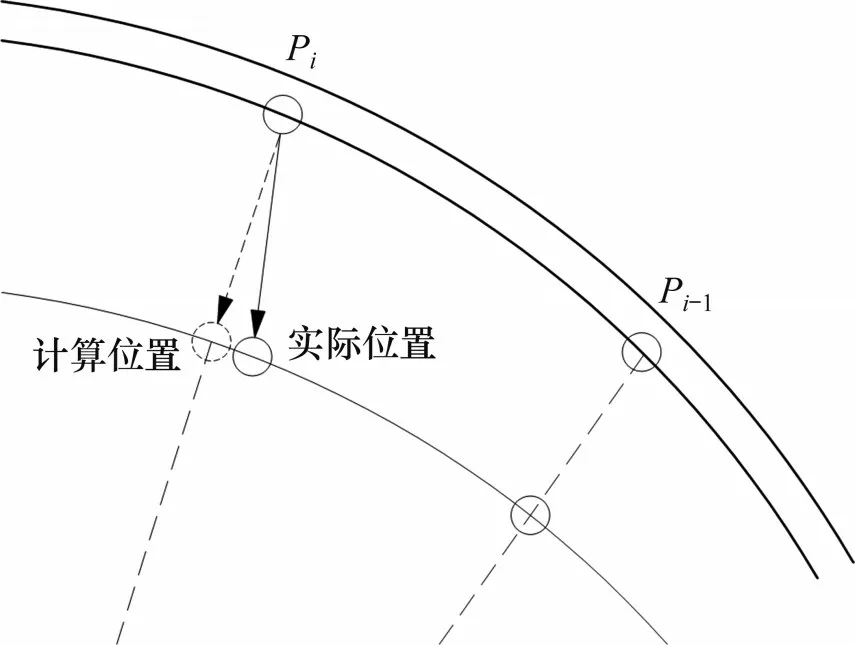
图3 监测点位置变动示意图Fig.3 Diagram of location change of the monitoring point
而在计算过程中,若仍然使用初始极角进行计算,则很有可能产生较大的计算误差,同时,由于每个监测点的极角均会发生变化,还会造成累计误差。
为了减小倾角-变形算法在有限监测点下的计算误差,可以通过补充假设和约束条件的方式对隧道变形后的极角进行修正,并将修正后的极角重新代入倾角-变形算法,从而改进算法的计算结果。
根据隧道变形前后的形状特点,补充假设条件:隧道变形前后相邻2个传感器间的弧长相对于总弧长的比例不变。令变形前隧道上部拱形结构总弧长和相邻2个传感器间的分段弧长分别为s、li,变形后为s′、li′,则补充的假设条件可以用数学表达式表示为
根据极坐标下的弧长积分公式可以得到
式中:Φi为修正后的倾角。通过补充假设条件,利用式(21)和式(22)即可实现对倾角-变形算法计算结果的修正。
2 有限差分算例
2.1 有限差分模型建立
以某隧道断面设计为参考,建立Flac 3D数值模型,如图4所示(其中,R为半径)。断面形状为三心圆,半径分别为R1=5.7 m,R2=R3=8.2 m,|下侧角度α=12°,厚度为0.35 m,底部固定约束。采用弹性本构模型,C25混凝土力学参数选取如表1所示。

表1 C25混凝土物理力学参数Table 1 Mechanical parameters of numerical model of C25 concrete

图4 隧道数值模型Fig.4 Tunnel numerical model
倾角传感器通过梁结构单元模拟。梁结构单元两端采用固定链接,当模型发生变形时,结构单元位置随之产生相应变动。输出结构单元端点的x、y坐标,则隧道变形前后结构单元的倾角可以按下式计算:
式中:θ和θ′分别为变形前后结构单元的倾角;(x1,y1)和(x2,y2)分别为变形前结构单元端点坐标;(x1′,y1′)和(x2′,y2′)分别为变形后结构单元端点坐标;Δθ为倾角变化量。
2.2 计算结果分析
在隧道模型内侧对称设置10个结构单元,以传感器所在位置为边界划分出9个极角区间,在隧道模型上施加1×104kN·m-2的法向均布荷载,隧道发生变形,待变形稳定后输出隧道的位移云图,如图5(a)所示。输出结构单元的端点坐标并计算倾角,在不进行极角修正的情况下,使用推导的倾角-变形算法计算得到隧道各点的极径变化量Δr,并将其与数值模拟值进行对比,如图5(b)所示。

图5 均布荷载下隧道变形计算结果Fig.5 Deformation results of tunnel under uniform load
从图5(b)可以看出:算法计算得到的隧道变形量在极角90°位置最大,向两端逐渐减小,这与数值模拟结果基本相同。但未经极角修正情况下的计算结果与模拟值相比存在明显误差,不符合监测需求。
使用1.3节所述极角修正方法对算例的计算结果进行修正,得到结果如图6所示。从图6可以看出:修正后的计算误差相比于修正前明显减小,且仅需2次迭代修正,计算结果便与数值模拟结果基本吻合。

图6 经过迭代修正后的极径变化量计算结果Fig.6 Deformation results after iterative correction
为了进一步量化评价算法的计算误差,采用最大绝对误差和平均相对误差这2个评价指标对计算结果进行评价。用Δr(φ)表示算法计算得到的隧道变形量,ΔR(φ)表示数值模拟得到的理论变形量,则最大绝对误差和平均相对误差可以表示为:
式中:Emax为最大绝对误差;δ为平均相对误差。
但实际计算中Δr(φ)与ΔR(φ)往往较复杂,难以进行积分运算。为了计算方便,可以选取曲线上的若干点,采用离散的方法来近似求得平均相对误差,即
将计算结果与数值模拟结果代入式(26),得到不同迭代修正次数下隧道变形计算的平均相对误差,如图7所示。从图7可以看出:随着迭代修正次数增加,误差逐渐减小并最终趋于稳定,稳定后隧道变形计算平均相对误差为3.64%(低于5%),同时,计算出稳定后隧道变形计算的最大绝对误差为0.178 mm,证明了倾角-变形算法的准确性。在实际使用中,为了保证计算结果准确性,应按照修正方法进行至少3次迭代修正。此外,在修正过程中只对传感器极角进行修正,没有改变传感器的倾角输出值,也验证了1.3节中极角修正假设的正确性。

图7 不同修正次数下的隧道变形计算平均相对误差Fig.7 Average relative errors of tunnel depormation caculation in different correction times
3 倾角-变形算法适应性分析
算例模型的荷载形式为对称均布荷载,但在实际隧道工程中,隧道断面所受荷载形式可能更加复杂,因此,需要验证倾角-变形算法在不同工况下的适应性。隧道所受荷载类型可以大致分为均布荷载、对称非均布荷载和非对称荷载[21]3种形式。这里采用第2节有限差分隧道模型模拟对称非均布荷载和非对称荷载这2种工况。
3.1 对称非均布荷载工况模拟
对于对称非均布荷载工况,在原有1×104kN·m-2均布荷载的基础上增加0.1×104kN·m-2中间荷载,以此模拟非均布荷载类型。隧道模型参数和传感器位置与均布荷载工况保持一致,最终得到该工况下的隧道位移云图如图8(a)所示,可以看出,由于施加了额外荷载,隧道的变形与均布荷载下有明显不同,整体呈竖向压扁形式。

图8 对称非均布荷载下隧道变形计算结果Fig.8 Deformation results of tunnel under symmetrical non-uniform load
输出传感器的倾角,代入倾角-变形算法,同样进行3次迭代修正,得到隧道各点的变形量Δr,并绘制出极径变化量Δr与极角的关系曲线,如图8(b)所示。从图8(b)可以看出:对称非均布荷载工况下算法极径变化量计算值与数值模拟值基本一致,代入式(22)与式(24)计算得到当前工况下隧道变形的最大绝对误差为0.424 mm,平均相对误差为6.07%,计算误差较小。
3.2 非对称荷载工况模拟
在1×104kN·m-2均布荷载的基础上,通过在模型右侧增加0.05×104kN·m-2荷载的方式模拟非对称荷载,变形稳定后输出隧道位移云图如图9(a)所示。将传感器倾角代入倾角-变形算法,绘制非对称荷载工况下Δr与极角的关系曲线,如图9(b)所示。从图9可见:在该工况下,算法计算的隧道变形最大绝对误差为0.706 mm,平均相对误差为4.95%,说明倾角-变形算法在非对称荷载工况下同样具有较好的适应性。

图9 非对称荷载下隧道变形计算结果Fig.9 Deformation results of tunnel under asymmetric load
通过分析上述3种工况可知:算法在不同工况下的测量精度有所不同,其中,均布荷载工况的计算误差最小,最大绝对误差仅为0.178 mm,平均相对误差仅为3.66%;非均布荷载算法的计算误差较大;从整体平均误差看,对称非均布荷载工况下的平均相对误差最大,为6.07%;从局部监测点的最大误差角度看,非对称荷载工况下的误差最大,为0.706 mm。虽然算法在不同工况下的误差不尽相同,但都保持在较低值,最大绝对误差均不超过1 mm,平均相对误差小于7%。
4 试验验证
通过有限差分算例分析算法自身误差后,这里采用室内试验方式验证算法在实际使用过程中隧道变形监测的准确性。
4.1 试验设计
室内试验设计如图10(a)所示。模型尺寸参考第2.1节中数值模型尺寸进行缩尺设计,缩尺比为1:5。缩尺后隧道高为1.48 m,最大宽度为2.28 m。由于所用倾角-变形算法与隧道自身的材料性质无关,同时,为简化试验过程,试验模型采用10 mm普通螺纹钢筋及5 mm钢板拼接而成,如图10(b)所示。在模型内侧预留有10个监测点位,用于安装倾角传感器(C1、C2、…、C10为传感器编号)。
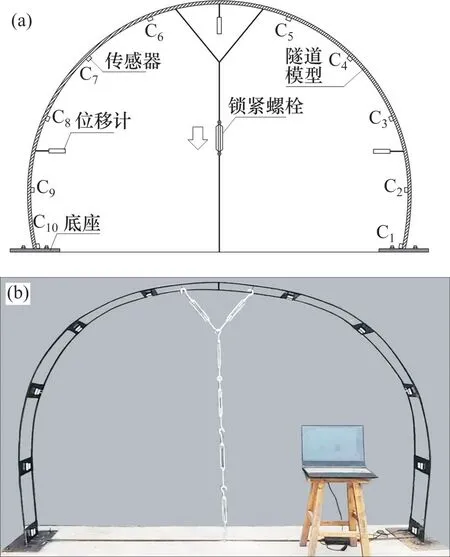
图10 室内模型试验Fig.10 Indoor model test
试验以锁紧螺栓作为加载装置,通过对模型施加竖直或水平方向上的拉力使其发生变形,模拟隧道拱顶沉降和水平收敛。加载通过变形控制,共设置10个加载等级,控制模型变形从0 mm逐级增大到50 mm,试验时,缓慢加载以保证传感器测量准确。受试验条件限制,模型试验无法像数值模拟一样输出隧道所有极角位置的实际变形,因此,仅对2个具有代表性的隧道变形指标进行实际监测。选取隧道拱顶沉降和水平收敛[22-23]作为监测指标,将3个位移计分别设置于模型的拱顶和拱腰位置,3个位移测点记为W1、W2和W3,记录试验过程中模型竖直和水平方向上的位移,其中,拱顶沉降通过位移计直接读取,水平收敛则通过读取水平方向上的2个位移相加获得。
传感器的布置如图10(a)所示。以右侧拱脚为起始点在模型内侧设置10个传感器,依次编号为C1~C10。起始监测点对应的极角为0°,末尾对应极角180°,两侧监测点基本呈对称布置,记录试验过程中各监测点产生的倾角。
4.2 试验结果与分析
图11所示为试验加载过程中各倾角传感器的倾角变化量。由于模型结构和加载基本对称,故所得倾角变化也基本对称,其中传感器C4、C5、C6和C7处的倾角变化呈减小趋势,传感器C1、C2、C9和C10处的倾角变化呈增大趋势,传感器C3与C8处的倾角变化不明显,且拱顶附近倾角变化比拱脚处的倾角变化大。根据加载方式,可以初步判断倾角传感器的测量趋势正确。

图11 不同加载等级下传感器倾角变化量Fig.11 Variation of inclination under different loading levels
将传感器所测结果代入倾角-变形算法计算位移测点W1、W2和W3在极坐标下的变形量,分别记为Δr1、Δr2和Δr3。为了能与位移计所测位移相比较,利用极坐标与直角坐标的转换关系对所得Δr1、Δr2和Δr3进行直角坐标转换,转换关系为
式中:Δxi和Δyi分别为测点i在直角坐标系x和y方向上的位移,mm;Δri为测点i在极坐标下的变形量,mm;φi为测点i所在极角。
利用式(27)计算得到3个位移测点在直角坐标系下的位移,其中,Δy2为隧道模型的拱顶沉降,Δx1与Δx2的和为隧道的水平收敛。将得到的拱顶沉降和水平收敛与位移计所测的实际值进行比较,如图12所示。

图12 隧道模型变形监测结果Fig.12 Monitoring results of tunnel deformation
从图12可以看出:利用本文方法得到的拱顶沉降和水平收敛与实际结果接近,可以正确反映试验过程中测点的位移变化趋势。拱顶沉降的平均测量误差为7.34%(小于8%),水平收敛的平均测量误差为4.10%(小于5%)。由于传感器测量误差的存在,试验误差比数值模拟误差大,但仍较小。
5 结论
1) 通过设立合适的坐标系和假设条件,隧道变形与倾角之间可以建立数学关系,并据此可得到隧道倾角-变形计算方法。
2) 监测点的极角随隧道变形而改变,直接影响倾角-变形算法计算精度。假定隧道变形前后相邻2个传感器间弧长与总弧长的比例不变,修正极角,则只需2次迭代修正,即可将计算误差降低到5%以下。
3) 隧道倾角-变形算法在均布荷载、对称非均布荷载和非对称荷载等工况中均具有良好的适应性和较高的准确性,其最大绝对误差小于1 mm,平均相对误差小于7%。
4) 即使存在传感器测量误差,隧道倾角-变形算法仍具有较高的监测精度,竖向拱顶沉降监测误差小于8%,水平收敛监测误差小于5%。
猜你喜欢
北方建筑(2022年2期)2022-11-21
煤气与热力(2022年4期)2022-05-23
水利水电科技进展(2021年6期)2022-01-07
科学大众(2021年19期)2021-10-14
中国临床医学影像杂志(2021年6期)2021-08-14
北京汽车(2021年3期)2021-07-17
水电站设计(2020年4期)2020-07-16
China Communications(2018年3期)2018-04-04
湖南畜牧兽医(2016年3期)2016-06-05
西安建筑科技大学学报(自然科学版)(2014年3期)2014-11-12