永磁同步电机变频调速系统动态解耦控制方法
2024-03-03 03:05杨智玲
绵阳师范学院学报 2024年2期
程 玮,杨智玲
(1.厦门市智慧渔业重点实验室,福建厦门 361100;2.厦门海洋职业技术学院海洋机电学院,福建厦门 361100)
0 引言
近年来,随着稀土资源的开发与利用,获得新型永磁材料,永磁同步电机逐渐得到应用.相比于传统电机,永磁同步电机由永磁体提供励磁,使得电机的结构更为简单.为了使永磁同步电机运行更加精准,设计了变频调速系统对其进行控制.然而,系统中存在的耦合关系会导致系统难以控制,性能较差.在这样的情况下,就需要对永磁同步电机的变频调速系统进行解耦控制,以提高系统性能.对此,很多研究人员提出了解耦控制方法.
文献[1]建立单相并网变换器数学模型,利用基尔霍夫电压定律计算交流侧电路的电压平衡方程,对电压电流对应的正交分量进行虚构处理,获得坐标系下的数学模型,添加自由度实现矢量控制,利用SOGI算法的锁相环应对系统中的谐波影响,通过将实际的物理量进行1/4周期延时,对物理量的波动进行响应,提升动态响应特性,根据瞬时功率理论,计算静止坐标系下的表达式,实现系统的解耦控制.实验结果表明该方法通用性较差.文献[2]针对系统中含有多个回路的情况,建立回路增益相对矩阵,对回路之间产生的耦合现象进行解耦,通过倍数放大耦合关系,求解增益信号,在传递函数中处理静态信号,转换获取回路的变量耦合方式,传递各回路的通量信息,基于相对矩阵对角理论推导耦合方式,利用误差校正规则对系统中的信号进行补偿,完成系统的解耦控制.实验结果表明该方法控制时延较高.文献[3]建立线性变参数模型,利用该模型对流量和压力的关系进行表达,通过线性二次型调节器分析状态反馈信息,获得增益值,采用滑膜观测器设计控制方案,将其与状态反馈控制器相结合,完成系统的解耦控制.实验结果表明该方法解耦控制精度不高.
考虑到上述文献提出的系统解耦控制方法无法满足当前永磁同步电机变频调速系统的实际应用控制需求,本研究以常规的永磁同步电机变频调速系统为研究对象,提出一种永磁同步电机变频调速系统的动态解耦控制方法.在建立的系统数学模型下获取解耦控制信号,并通过加权修正对该信号进行优化处理,以此生成动态解耦控制信号,实现稳定性较高的动态解耦控制结果.
1 永磁同步电机变频调速系统动态解耦控制方法设计
1.1 建立变频调速系统数学模型
永磁同步电机变频调速系统有着多种工作状态,在不同的工作状态下,该系统呈现不同的电压值,如图1 所示[4].图1中,α和β分别表示电压的矢量坐标.U1~U7则分别表示不同工作状态下的电压.其中:
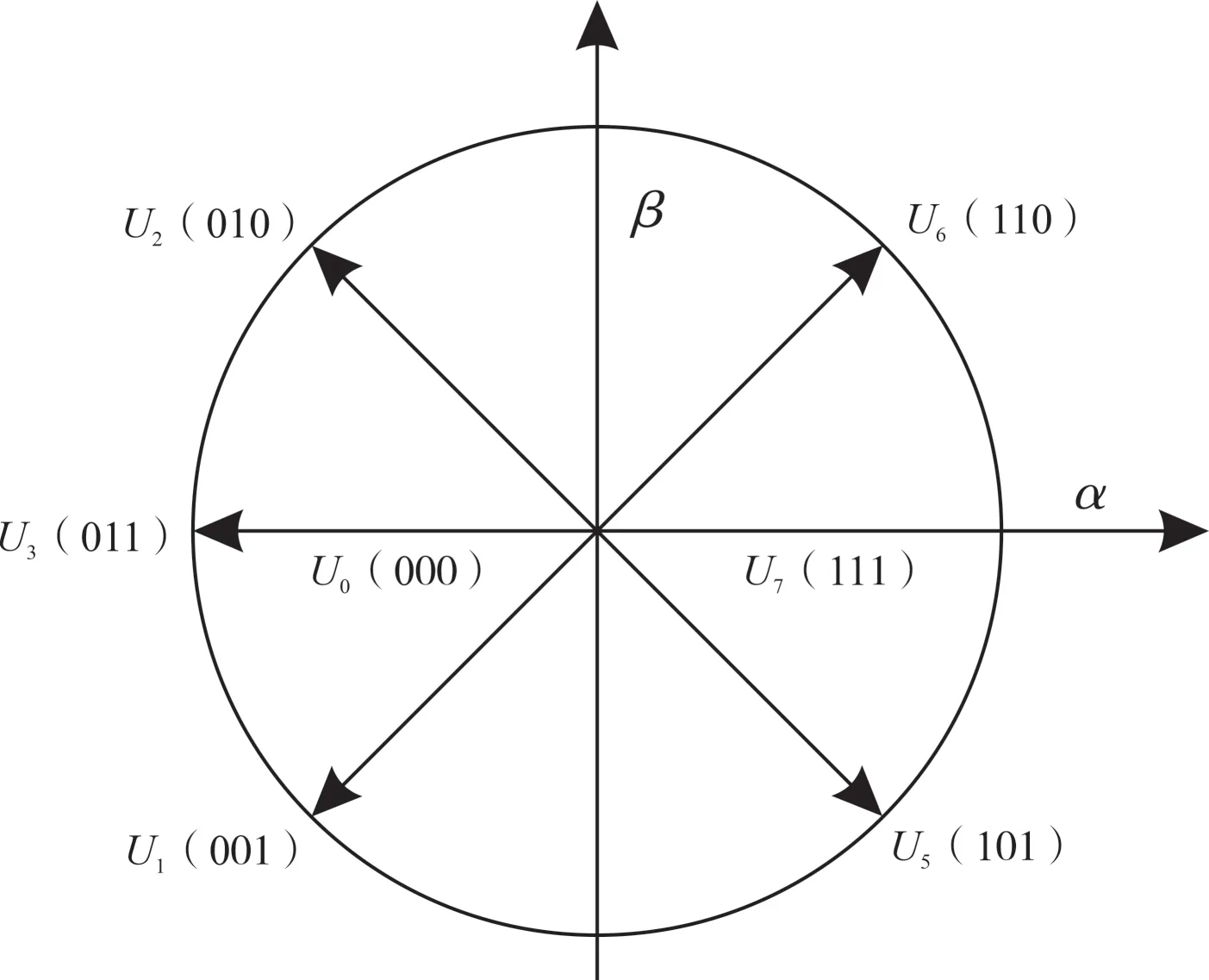
图1 系统电压标量图Fig.1 System voltage scalar diagram
U(0000):表示三相电压都为零,此时没有电压施加到电机上.
U(1001):表示A相电压保持不变,B相电压减小,C相电压保持不变.
U(2010):表示A相电压保持不变,B相电压保持不变,C相电压减小.
U(3011):表示A相电压保持不变,B相电压减小,C相电压减小.
U(5101):表示A相电压减小,B相电压保持不变,C相电压减小.
U(6110):表示A相电压减小,B相电压减小,C相电压保持不变.
U(7111):表示A相电压减小,B相电压减小,C相电压减小.
根据图1,建立永磁同步电机变频调速系统的电路模型,如图2所示.
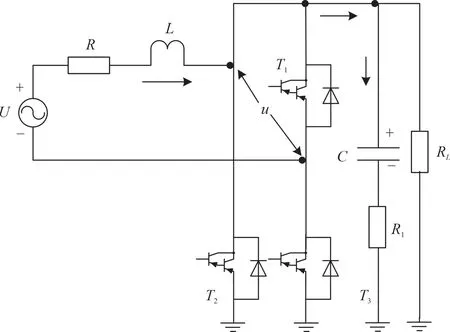
图2 永磁同步电机变频调速系统电路模型Fig.2 Circuit Model of Permanent Magnet Synchronous Motor Variable Frequency Speed Control System
图2 中,U表示初始电压,u表示不同工作状态的变换电压,R表示滤波电感等效电阻,T1、T2和T3分别表示内绝缘栅双极型晶体管,该晶体管包含一个并联的有续流二极管,L表示交流侧滤波电感,C表示连接的电源,RL表示直流侧负载电阻,箭头为电流流动方向.
采用基尔霍夫电压定律对该电路模型的电压平衡进行计算,如式(1)所示[5].
式中,d表示电压平衡状态,I表示电流.
为该系统模型添加自由度,建立静止坐标系下的系统数学模型[6].自由度的计算如式(2)所示.
式中,s表示需要添加的自由度值.
基于式(2)的计算结果,建立系统数学模型,如式(3)所示.
式中,S表示静止坐标系下系统数学模型,uα和iα分别表示α轴上的电压与电流,uβ和iβ则表示β轴上的电压与电流,ω表示轴分量.
通过上述计算,获得α、β轴静止坐标系下的永磁同步电机变频调速系统模型.
1.2 分离系统模式系数获取控制信号
在建立的永磁同步电机变频调速系统数学模型中,将模型的系统模式系数分离出来.本研究采用限定项法完成这一步骤[7].首先,重构出待校正的模式系数,并对其进行分解处理.记录模式系数与斜率之间的关系矩阵为Z,两者之间的关系表达如式(4)所示.
式中,g表示数学模型的斜率信息,该信息通过哈特曼测量方法所得,a表示数学模型的模式系数.
加入相位补偿量,结合变频调速系统的驱动影响,得出该数学模型的模式系数矩阵,如式(5)所示[8].
式中,K表示模式系数矩阵,k表示校正量,j表示模式系数的阶次,Zj则表示在第j阶的关系矩阵.
将得到的模式系数矩阵进行扩展,得到变频调速系统解耦控制的响应矩阵,如式(6)所示.
式中,Rm表示响应矩阵,K′表示考虑响应时延后的模式系数矩阵.
采用求广义逆的方式处理式(6)的计算结果,如式(7)所示[9].
式中,t表示动态解耦控制的时间,vt表示在不同时间点下,对永磁同步电机变频调速系统进行动态解耦控制所需的控制信号.
通过上述处理,得到永磁同步电机变频调速系统动态解耦控制过程中的控制信号.
1.3 优化处理动态解耦控制信号
利用上述得到的控制信号,建立多变量的动态矩阵进行解耦控制.本研究采用DMC 算法完成这一步骤[10].首先,测定控制信号中的阶跃响应采样值,建立动态解耦控制的预测模型,如式(8)所示.
式中,y(t)表示在t时刻的预测值(t)表示在t时刻的初始预测值,B表示由阶跃响应系数构成的矩阵,ΔM表示优化变量.
为未来动态解耦控制时刻输出期望值,以此反映不同的重视程度,防止对永磁同步电机变频调速系统的解耦控制量出现较大幅度的变化[11].
基于输出的期望值,计算在t+1时刻的动态解耦控制预测输出误差,如式(9)所示.
式中,et+1表示预测输出误差.
通过式(9)的计算结果,判定该动态解耦控制信号是否为渐进稳定的线性对象[12].判定结果为“否”,则需要进行线性化处理,判定结果为“是”,则利用计算得到的预测输出误差对动态解耦控制量进行加权修正处理,如式(10)所示.
式中,y表示修正后的解耦控制量预测值,h表示修正向量.
将修正后的预测值进行移位优化计算,结合修正反馈信号,对动态解耦控制的信号进行滚动优化[13].这一过程需要在永磁同步电机变频调速系统在线运行的过程中进行,完成动态解耦控制信号的优化处理.
1.4 有功-无功动态解耦控制
基于永磁同步电机变频调速系统有功状态与无功状态的特性,将动态解耦控制信号进行分化处理,分离有功与无功的动态解耦控制信号[14].测量系统中的瞬时无功波动值,根据波动值的大小将动态解耦控制信号分离为两个框架,如图3所示.
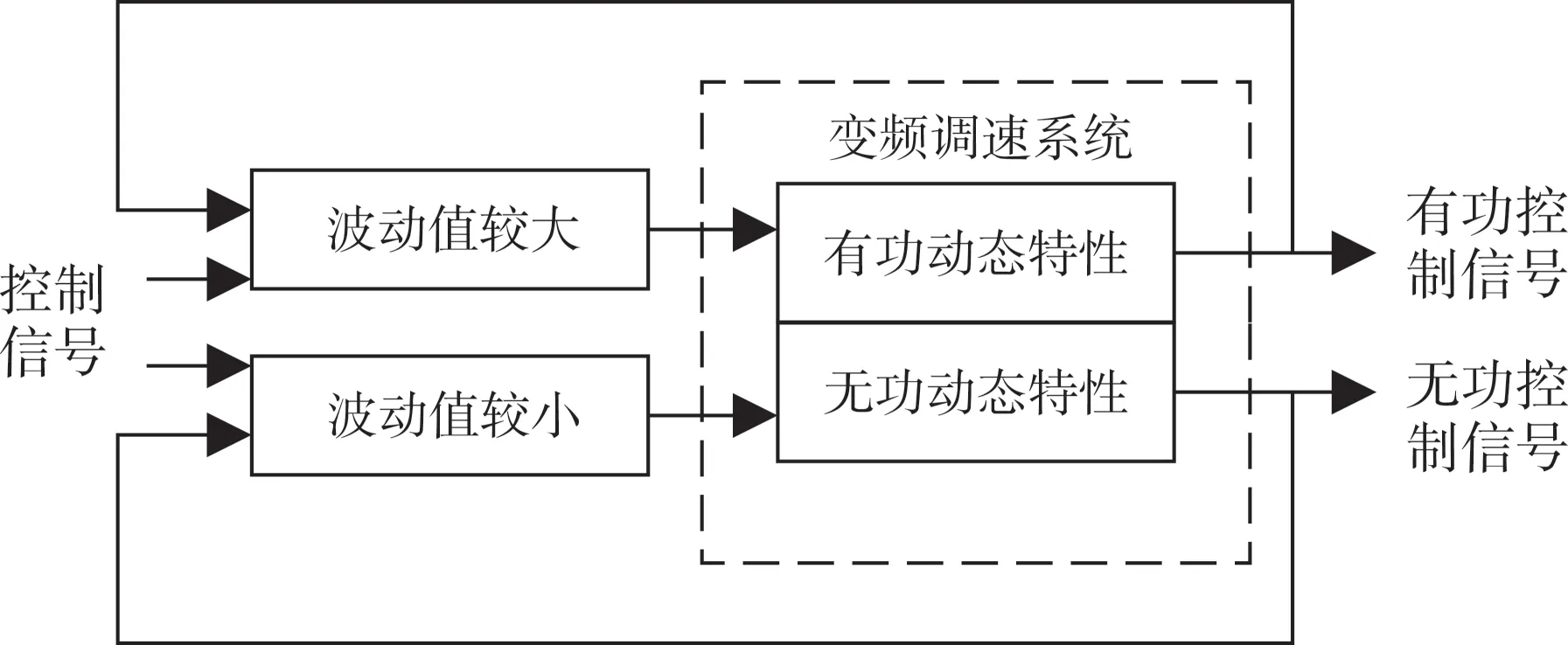
图3 动态解耦控制信号分离框架Fig.3 Dynamic decoupling control signal separation framework
通过如图3所示的信号分离过程,获得系统有功与无功状态下的动态解耦控制信号.在分离的过程中,瞬时无功波动值较大的系统内需要并联一个滤波器,如图4所示.
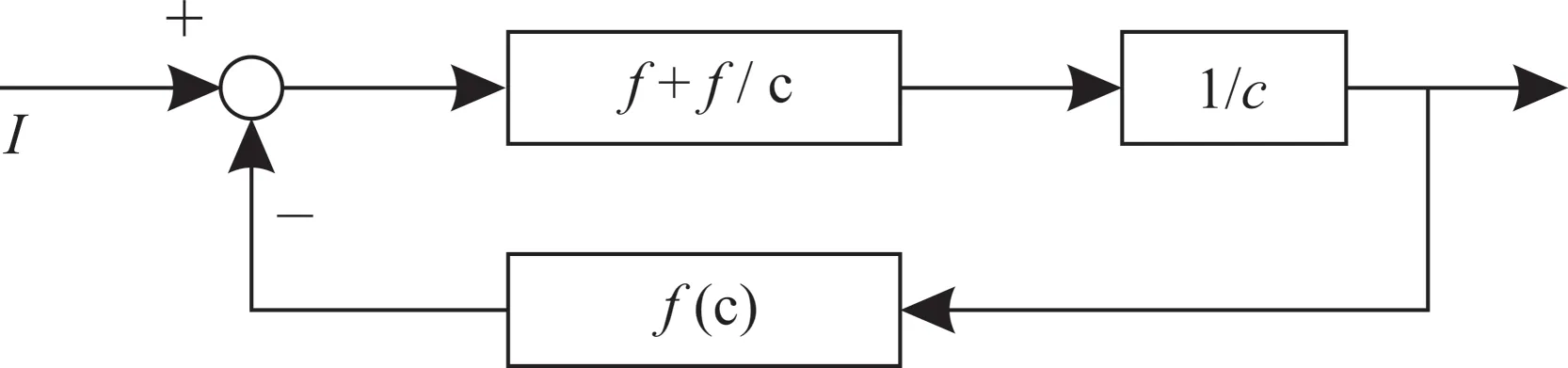
图4 滤波器连接示意图Fig.4 Filter connection diagram
图4 中,c表示控制参数,f表示电容电压直流分量的平均值,f(c)表示滤波器谐波含量.
在本研究中,波动值较大与较小的区分值设定为0.9[15].为了实现系统动态解耦控制的无静差控制,需要在变频调速系统呈现无功状态时,设定参考值,如式(11)所示.
式中,qmax与qmin分别表示在系统运行最大电流Imax与系统运行最小电流Imin的参考值.
为了避免永磁同步电机变频调速系统运行过程中可能产生的故障对动态解耦控制效果的影响,在有功与无功两种状态下,均需要留有解耦控制裕量,以实现较为精准的动态解耦控制.裕量通过相角差和确定,与其保持一致.
通过上述步骤,完成对永磁同步电机变频调速系统动态解耦方法的设计.
2 实验
2.1 实验准备
为了验证本研究所提方法的可行性,设计实验,从实验的研究结果验证所提方法的有效性.本次实验采用1.6 kW 三相 220 V 正弦波永磁同步电机作为被控电机,该电机的参数值如表1所示.

表1 永磁同步电机参数Tab.1 Parameters of permanent magnet synchronous motor
根据表1 所示参数对变频调速系统进行设置,如表2所示.
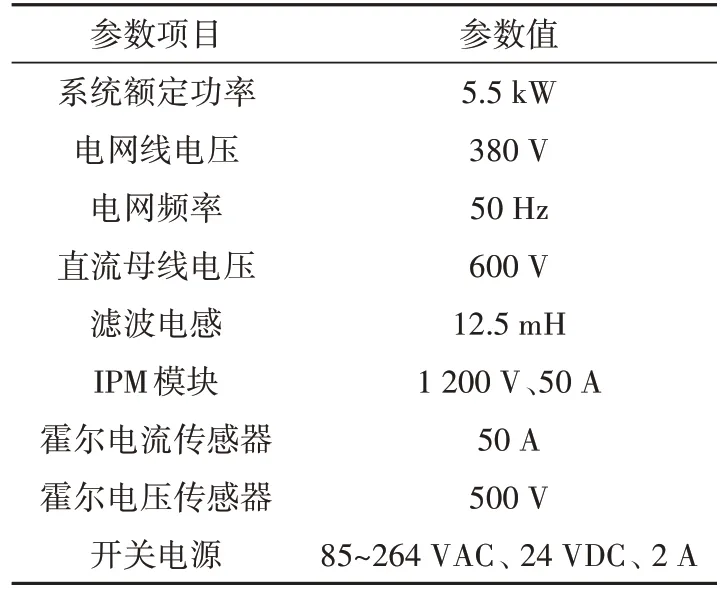
表2 变频调速系统参数Fig.5 Implementation of dynamic decoupling controller
以如表2 所示的永磁同步电机变频调速系统为研究对象开展本次实验.
对本文设计的永磁同步电机变频调速系统动态解耦控制方法进行物理实现,采用数字信号处理器(DSP)作为控制器的实现方式.如图5所示.

图5 动态解耦控制器实现Fig.5 Implementation of dynamic decoupling controller
采用如图5 所示的动态解耦控制器对该系统进行控制.为了验证本文所提方法的解耦控制性能,为该系统给定不同的转速值,在四组回路中进行解耦控制.
2.2 动态解耦控制结果
将基于本文所提方法实现的动态解耦控制器与永磁同步电机变频调速系统进行连接,测试该系统1s 内,在2 000 r/min 的基础上给定转速下的位移响应曲线,如图6所示.
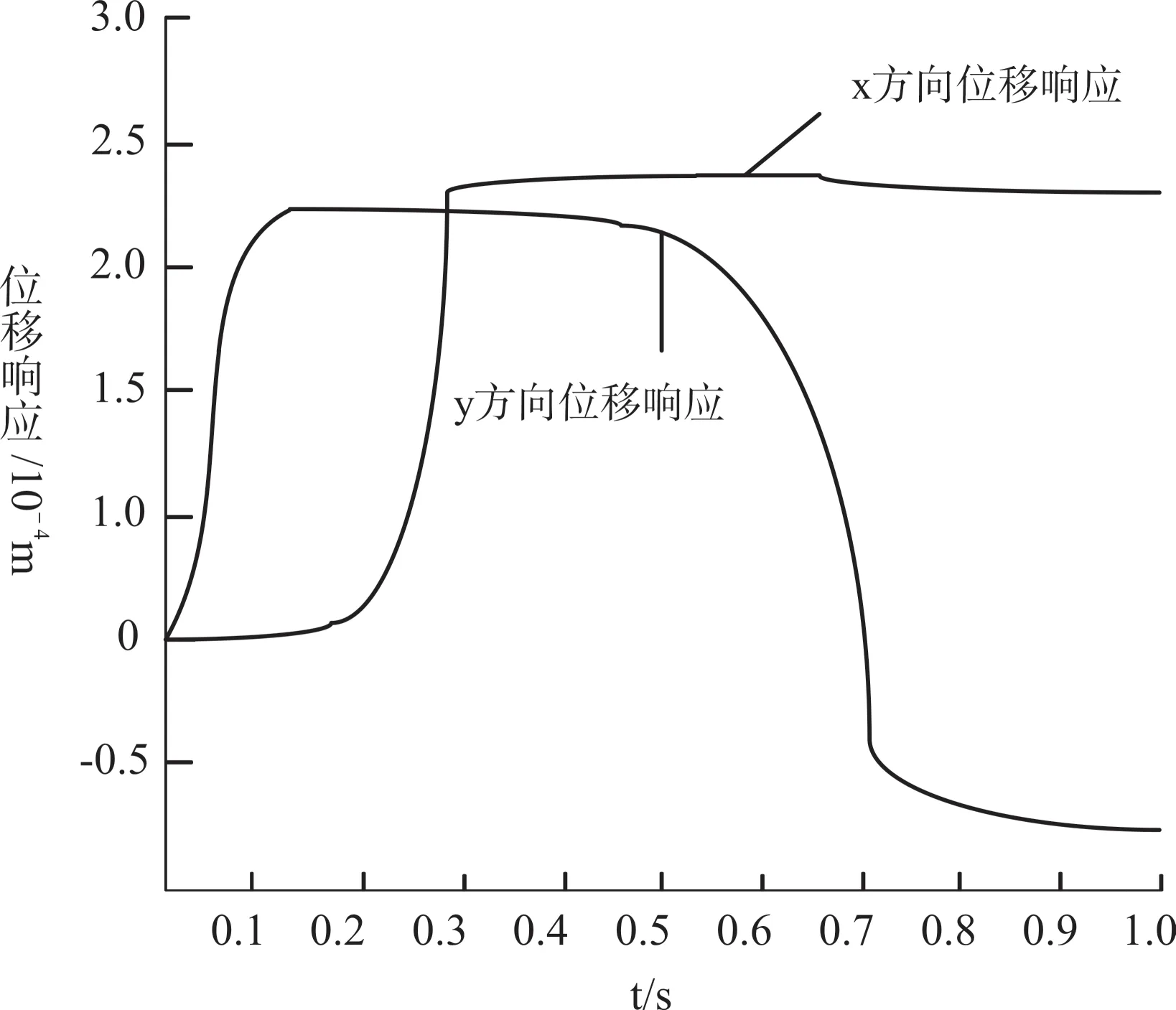
图6 动态解耦控制位移响应曲线Fig.6 Dynamic decoupling control displacement response curve
由图6 可知,本次永磁同步电机变频调速系统动态解耦控制实验结果中,在1 s 的时间内,位移响应的结果在部分区间内较为平缓,体现了本文所提方法的解耦特性,说明解耦控制达到预期目标.无论是在x 方向还是y 方向的位移响应均展现了较好的跟踪性能.从这一动态解耦控制结果可以初步判断本研究所提方法的解耦控制结果较为合理,展现了该方法的应用结果,表明所提方法的可行性.
2.3 结果分析指标
为了更加直观地体现出本研究所提技术方法的有效性,本次实验针对不同解耦控制方法下的负荷响应进行统计,如式(12)所示.
式中,A表示解耦控制负荷响应的幅值,ti表示大惯性时间延长,td表示延迟性时间延长,ζ表示解耦控制过程中的超调量.
负荷响应的计算结果直接反映了永磁同步电机变频调速系统解耦控制方法下,控制结果的鲁棒性,体现了对永磁同步电机变频调速系统动态解耦控制结果的优劣.计算所得的负荷响应幅值结果越稳定,则说明该方法的动态解耦控制效果越高,应用性更强.
2.4 结果分析与讨论
将永磁同步电机变频调速系统动态解耦控制实验的时长延长至1 000 s.为了体现本研究所提方法解耦控制结果的有效性,分别应用文献[1]和文献[2]提出的解耦控制方法进行永磁同步电机变频调速系统解耦控制实验,分析三种方法控制下,永磁同步电机变频调速系统所承担的负载.经过实验,得出不同方法的实验结果如图7所示.

图7 不同方法解耦控制结果Fig.7 Decoupling control results of different methods
由图7 可知,本文所提出的永磁同步电机变频调速系统动态解耦控制方法,计算所得的负荷响应幅值较为稳定,并且所需的解耦控制时间相较于其他两种方法也比较短,在278 s 就开始趋于稳定,而其他两种方法解耦控制过程中的超调量明显偏高,并且负荷响应幅值的变化幅度也比较大,直到1 000 s的实验时间结束后,也未达到稳定状态.
为了进一步测试本文方法的解耦控制能力,对三种方法控制下的电流响应曲线进行分析,分析结果如图8所示.
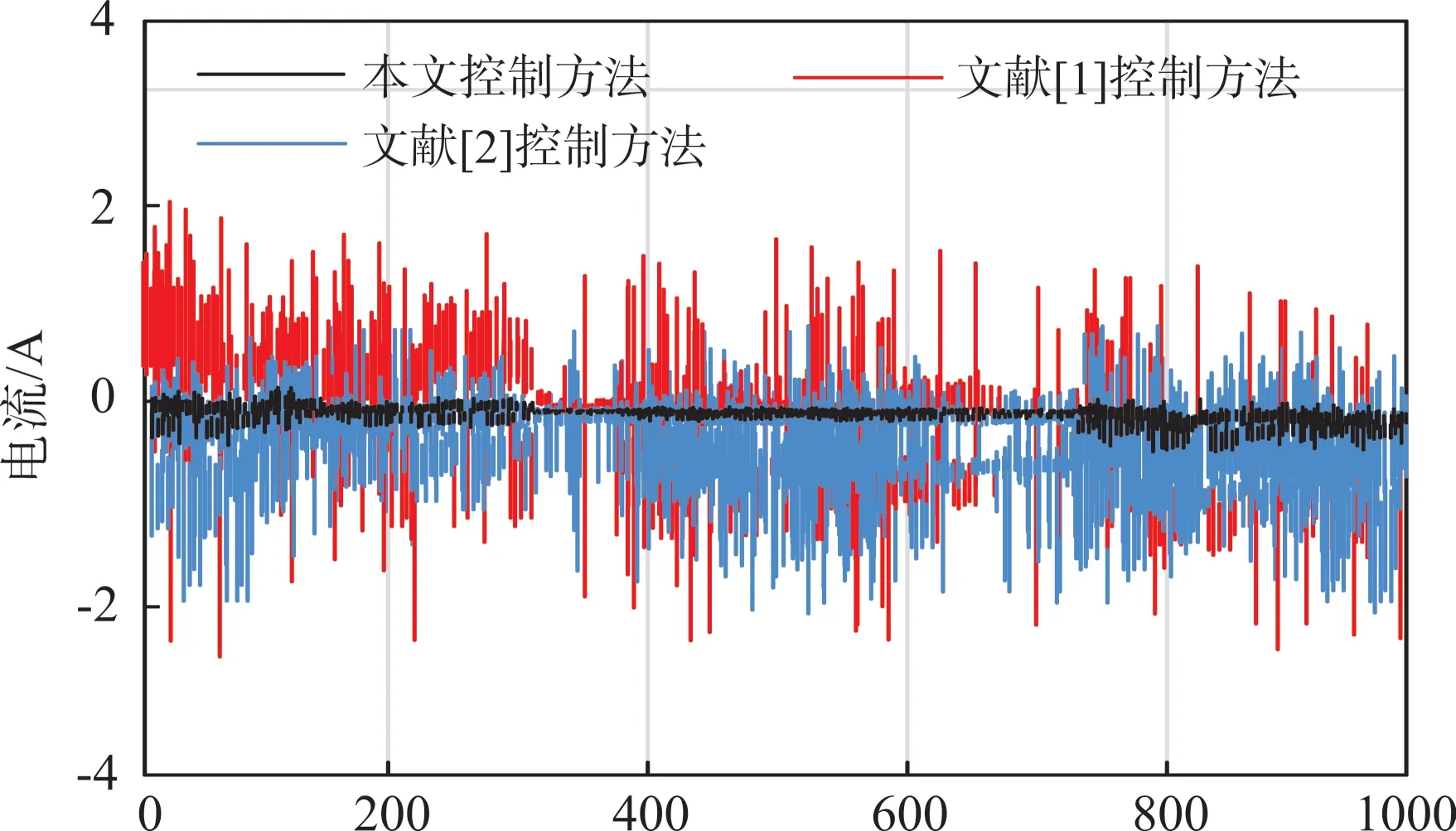
图8 不同方法控制下电流响应曲线分析Fig.8 Analysis of current response curves under different control methods
由图8 可知,不同方法控制下电流响应曲线中,本文控制方法的电流响应曲线较平稳,证明该方法的动态解耦控制效果最好,具有实用性.从对比结果可以看出,本文所提出的永磁同步电机变频调速系统动态解耦控制方法,负荷响应的稳定性效果较好,解耦控制效果较为稳定,在永磁同步电机变频调速系统运行过程中,能够起到较好的解耦控制效果,提高系统的整体性能,在永磁同步电机变频调速系统的实际运行中,具备较高的应用实践价值.
3 结语
在永磁同步电机的应用过程中,变频调速系统是保证其应用质效的重要部分.为了解决该系统运行过程中,不同回路之间存在的相互耦合关系,提出一种永磁同步电机变频调速系统动态解耦控制方法.从实验结果可以看出,依据所提方法得出的永磁同步电机变频调速系统动态解耦控制结果的负荷响应较为稳定,幅值较小,表明本文研究内容能够有效提高永磁同步电机变频调速系统动态解耦控制的效果,为提高变频调速系统的整体性能提供参考,推动永磁同步电机的应用与发展.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
光学精密工程(2016年3期)2016-11-07
设备管理与维修(2016年7期)2016-04-23
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
自动化博览(2014年4期)2014-02-28
汽车电器(2014年8期)2014-02-28
河南科技(2014年23期)2014-02-27
河南科技(2014年3期)2014-02-27