
基于IAP15的近距离船舶避碰系统设计
2024-03-04 02:24黄伟健吴浩基冯智锐黄荣杰
中国新技术新产品 2024年1期
黄伟健 吴浩基 冯智锐 黄荣杰
(广东海洋大学电子与信息工程学院,广东 湛江 524088)
随着世界进出口贸易的增加以及船舶朝着大型化和高速化方向发展,船舶碰撞事故也随之不断增多[1]。我国作为全球贸易大国,约90%的国际贸易是通过海运完成的,因此海洋运输对我国至关重要。然而,港口、码头等船舶密集区域中发生的碰撞事故数量持续增加,成为一个亟待解决的问题。尽管目前已有船舶自动识别系统(Automatic Identification System,AIS)、海图仪等设备广泛应用于海上船舶,但在船舶密集的场景中,这些设备仍然面临无法进行高精度测距以及避碰的问题。因此,研究船舶的近海域避碰技术对提高海上航运的经济性和安全性具有重要意义[2]。为了解决这一难题,本文针对港口码头等船舶密集场景,设计了一种船舶近距离激光测距系统,从而满足了船舶避碰和预警的需求。基于此,本文将介绍该系统的总体设计、硬件电路、工作原理和激光测距算法等。
1 系统总体设计
该系统以IAP15F2K61S2 芯片为基础,集成了8 位8 段共阳数码管模块、独立按键模块、激光测距模块和LED 指示灯模块。通过融入调频算法,实现了多方位数据处理,从而设计出了一种船舶近距离避碰系统。该设计的核心目标是解决多方位高精度测距问题,并实现高精度测距及报警功能。该系统首先利用激光测距模块完成高精度测距任务,其次采用调频算法对多点数据进行融合处理。与传统的相位式测距相比,调频算法距离分辨率、测距精度更高。通过串口传输,使多个测量点的数据汇总。数码管负责显示测量数据,并根据预设范围将数据划分为4 个部分:安全距离、远距离、中距离和近距离。当距离小于50 m 时,系统会自动计算距离的平均值。LED 灯、继电器和蜂鸣器根据不同范围的距离做出响应,以实现报警功能。此外,用户可以通过独立按键操作数码管和LED 灯的熄灭与开启、打开实时时钟界面以及进入障碍物距离平均值显示界面。通过实际应用收集到的数据表明,该系统解决了船舶在短距离内无法进行高精度测距及报警的问题。系统总体如图1所示。
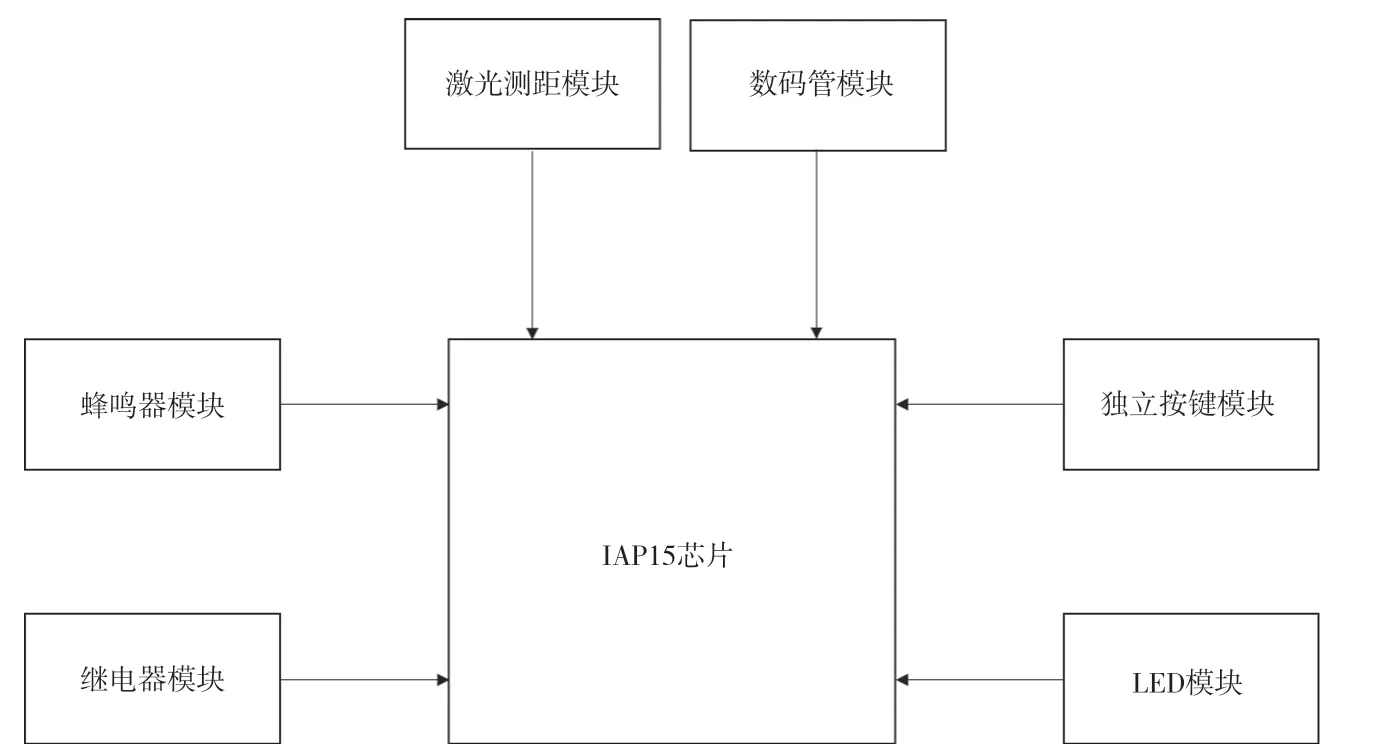
图1 系统总体框图
该系统以IAP15 芯片为核心,通过连接各外围模块,实现了系统的整体功能。其中,激光测距模块为最重要的外围模块,为系统测提供了高精度的测距数据。数码管模块和独立按键模块共同组成了海上工作人员的交互界面,方便操作员进行系统设置和结果观察。蜂鸣器模块、继电器模块和LED 模块则协同工作,构成了系统的报警机制,能够根据危险程度的不同选择相应的报警方式。
2 硬件电路设计
主控芯片选用的是STC15F2K61S2,其特点包括2 048 字节片内RAM、高可靠复位电路(不用外部复位)、高速ADC以及8 通道10 位。
数码管模块利用芯片P0 端口控制二极管显示及具体位置。所有数码管均可显示数字0~9 以及大、小写的26 个字母。它具有耗电低、反应速度快、使用温度范围广以及构造简单等优点。
独立按键模块由4 个按键组成,能够直接读取,检测占用时间短、误触率低。该模块还能区分长按和短按操作并且不受其他因素干扰。
激光测距模块的测距精度为±0.5 cm,标准差<5 mm(2 m范围内),盲区低至1.5 cm。它还具有强大的抗干扰能力。该模块以激光测距传感器为核心,通过精确计算发射和接收反射激光的时间差来测量距离,具有测距频率高和响应快速的特点,并配备了屏蔽罩,以有效保护外围电路免受电磁干扰。此外,该模块还集成了MCU 和专门的测距算法。在船舶上布置了8 个激光测距传感器:左右船舷各3 个、船头和船尾各1 个。这些传感器与距离传感器和GSM 模块紧密相连,并通过RS-485 串行总线接口实现高效通信。该接口采用差分平衡方式传输信号,因此具有出色的抗共模干扰能力,非常适合复杂的海洋环境。
LED 指示灯模块提供了一个灵活的软件控制机制,允许调整二极管亮灭时间的占空比。这一功能使笔者能够选择理想的亮度设置,从而延长发光二极管的使用寿命。此外,该模块还具有动态显示效果和大量的实际可视像素点,增强了整体视觉效果。
继电器模块在增强系统报警功能多样性方面发挥重要作用。为了防止在单片机复位过程中发生误触动作,在该系统中,选用了三极管(PNP)继电器,并实施了低电平触发的控制逻辑,从而提高了系统的稳定性和可靠性。
蜂鸣器模块的主要职责是警示海上作业人员。本文采用了有源蜂鸣器,其内部集成了专门的发声电路(源振荡),从而构成了1 个高效且可靠的发声装置。这种有源蜂鸣器能够提供清晰响亮的声音,保证在各种工作环境下都能有效地传达警示信息。
3 工作原理
该系统是一个完整的船舶近距离避碰系统,基于STC15-F2K61S2 设计,并由很多功能模块组成。
该系统首先通过数据采集机构(激光测距模块)收集距离数据,这些数据随后被传输到数据处理机构(IAP15F2K61S2芯片),该芯片采用线性调频激光测距算法对数据进行筛选,以剔除误差较大的数据,从而获得高精度的距离信息。在代码中,本文预设了阈值,划分了4 个不同的报警区域,每个报警区域都配置了不同的报警方式,以便通过用户交互机构及时警示海上作业人员并采取相应操作。数码管用于实时显示当前距离信息以及平均距离。按键功能包括切换当前距离界面、平均距离界面、进入实时时钟界面、关闭LED 灯、关闭继电器以及关闭蜂鸣器等。LED 灯根据4 个不同的阈值区域,通过亮、灭和流水灯等操作来警示作业人员潜在的碰撞风险。蜂鸣器和继电器也会在不同的阈值区域中以不同的响应频率发出警报,警示作业人员注意避碰。
系统工作原理图中的各模块机构如图2所示。数据采集机构主要依赖激光测距模块进行数据采集。由于海上环境易受风浪、天气等外界因素影响,因此其他测距方式难以满足高精度测距的需求。激光测距在稳定性和精确性方面表现出色。结合线性调频激光测距算法,能有效筛选并剔除误差较大的数据,从而显著提高测距数据的可靠性,与传统的相位式激光测距方式相比是一大优势。数据处理机构的核心是IAP15F2K61S2 芯片。该主控芯片不仅价格低,而且可靠性高。考虑到本系统中激光传感器间复杂的数据交互需求,该芯片凭借强大的数据处理能力,保证了数据的稳定传输与处理,为系统的稳定运行提供了保障。
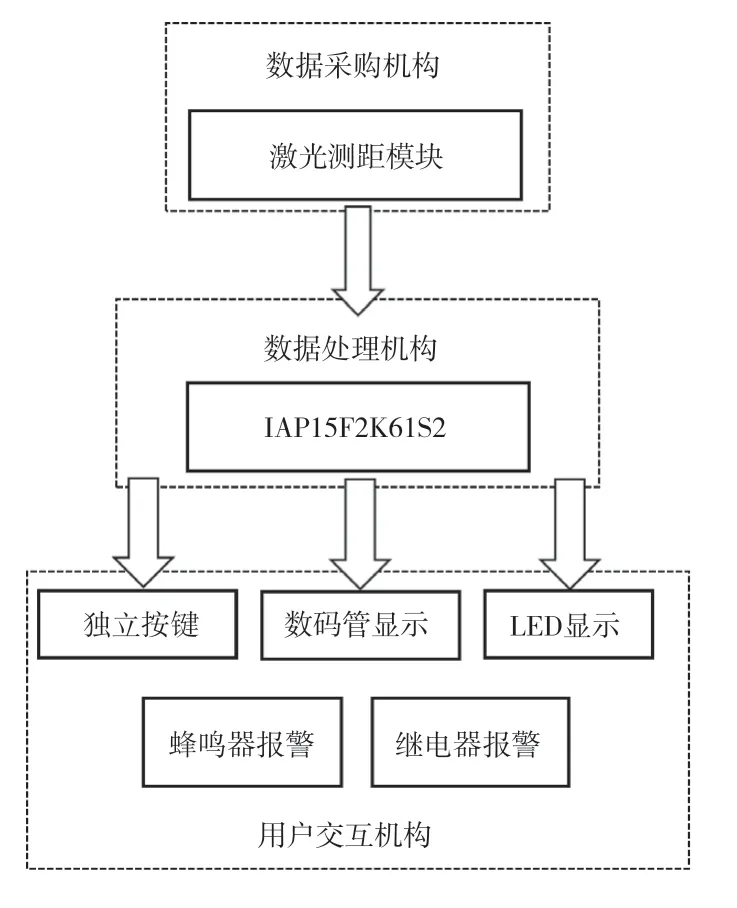
图2 系统工作原理图
用户交互机构由数码管、独立按键、LED 灯、蜂鸣器以及继电器组成,旨在实现以下功能。
数码管主要用于显示实时距离和实时时钟。当系统判断为安全距离时,数码管显示实时时间。一旦探测到障碍物靠近,数码管将迅速切换至距离显示界面,展示当前距离数据和障碍物的平均距离。
独立按键具有多项实用功能,例如关闭LED 灯报警、打开实时时钟界面以及进入障碍物距离平均值显示界面等。
当距离过近时,LED 灯发挥报警作用:当处于安全距离(>50 m)时,LED 灯保持熄灭;当处于远距离(40 m~50 m)时,L1和L2亮起;当进入中距离(30 m~40 m)时,L1和L2呈现呼吸灯状态;一旦进入近距离(<30 m),L1和L2保持呼吸灯状态,同时L3~L8启动流水灯模式。LED 灯报警模式见表1。

表1 LED 灯报警模式
蜂鸣器报警设定如下:当处于安全距离和远距离时,蜂鸣器保持静默。但处于中距离和近距离时,蜂鸣器会启动报警功能。特别是在近距离,蜂鸣器的报警响应间隔更短,警示更频繁。
继电器报警设定如下:与蜂鸣器相同,当处于安全距离和远距离时,继电器不工作。但当测距距离为30 m~40 m时,继电器每300 ms 闭合1 次;当距离为<30m 时,继电器的闭合频率提高,每100 ms 闭合一次。这种设计通过调整继电器吸合的时间间隔,提高了报警的紧迫性,使船员能更直观地感知到距离的变化。
4 基于线性调频激光测距算法设计
在海上,由于海浪、噪声等干扰因素,激光测距传感器的数据采集会受到一定影响,而数据采集的准确性直接关系到避碰方案的有效性。为了提高船舶测距的精确度,该设计采用了线性调频激光测距算法对数据进行优化处理,从而使采集到的数据更可靠和准确。
假设D为临近船舶与自身船舶的距离,c为光速,N为光波信号在往返中得到的整周期数,而Δσ为调制信号频率。那么在测量过程中,只需要获取N和Δσ的数据,利用这些数据进行计算,以得出船舶之间的距离D,如公式(1)所示。
式中:t为测量时间。
线性调频激光测距的原理与迈克尔逊干涉仪相似。在调频激光信号产生模块中,常用的驱动方式有锯齿波或三角波2 种,用于驱动半导体激光器。虽然锯齿波驱动的调频激光信号抗干扰能力较强,但在系统灵敏度等方面却不如三角波驱动的调频激光信号[3]。综合考虑海上环境的实际情况,笔者采用三角波信号的激光器进行测距驱动。
笔者采用线性调频激光测距算法进行距离测量,如公式(2)所示。
式中:T为调制周期;B为调频带宽;fIF为差频信号的频率。
在相同的时间域中,通过对比发射信号与回波信号,发现差频信号的频率在特定时间范围内保持不变。如果调制周期和调频带宽都是已知的且保持不变,就能根据这些数据计算距离D。该方法显著提高了测量精度,且抗干扰能力较强。
线性调频激光测距技术的固有分辨率如公式(3)所示。
式中:ΔR为三角波调制信号的带宽;B为三角波调制信号的带宽;Δτd为延时td后的回波信号瞬时频率。
由公式(3)可知,线性调频激光测距技术的固有分辨率与三角波调制信号的带宽之间存在反比关系,因此,增加调频激光信号的调频带宽,可以提高距离分辨率[4]。与传统的相位式激光测距相比,基于线性调频的激光测距算法在测距精度方面具有明显优势。
数据处理核心代码如下:
while(1)
{
Status=vl53l0x_start_single_test(&vl53l0x_dev,&vl53l0x_data,buf); //执行一次测量
if(Status==VL53L0X_ERROR_NONE)
printf("d: %4imm ",Distance_data);//打印测量距离
else
printf("Measurement is Error!!! ");
//delay_ms(100);
i++;
if(i>=10)
{
i=0;
LED0=!LED0;
}
}
5 应用线性调频激光测距算法的数值分析
本节将通过数值分析对比,进一步说明应用线性调频激光测距算法后的数据更具可靠性和稳定性。运用线性调频激光测距算法与运用相位式激光测距方式的数值分析对比见表2。
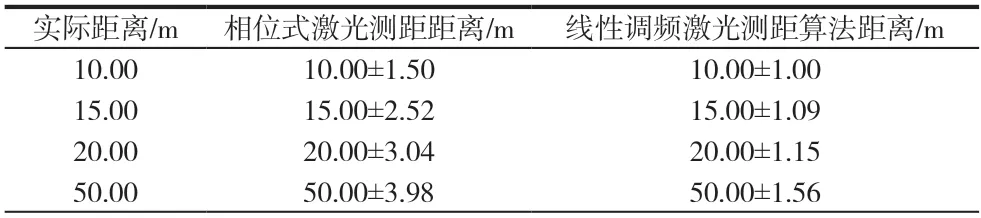
表2 应用线性调频激光测距算法的数值对比
经过对上述数值的分析与对比,可以得出以下结论:在不采用线性调频激光测距算法的情况下,测量距离越远,测量数据的误差越大。当应用线性调频激光测距算法进行数据测量时,不仅数据波动幅度变小,而且其误差也相对较小。由此可以推断出,应用线性调频激光测距算法的数据测量的稳定性与准确性更高。
6 结论
随着海上交通流量的日益增多和复杂的会遇态势的频繁出现,航海技术的各方面都面临着新的挑战,对海上安全避碰技术提出了更高的要求[5]。为了解决海上近距离避碰的问题,本文设计了一种用于港口码头的船舶避碰系统,并对该系统进行了整体性描述。其中,重点介绍了线性调频激光测距算法测距部分的原理,该算法显著提高了测距精度,以获取准确的距离信息,并根据评估结果判断是否需要生成避碰方案,当距离过近时对海上作业人员进行报警提示。
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
能源工程(2021年5期)2021-11-20
电脑报(2020年12期)2020-06-30
时代农机(2019年2期)2019-04-24
测控技术(2018年6期)2018-11-25
通信电源技术(2018年5期)2018-08-23
制导与引信(2017年3期)2017-11-02
汽车维护与修理(2016年10期)2016-07-10
西部广播电视(2015年9期)2016-01-18
西部广播电视(2015年9期)2016-01-18
