
面向无人作业的天空地协同网络:需求、挑战、技术变革机遇*
2024-03-04 02:05魏鹏冯伟葛宁
移动通信 2024年1期
魏鹏,冯伟,葛宁
(清华大学电子工程系,北京 100084)
0 引言
近年来,中国、美国、欧盟、日本、韩国等世界主要经济体都在大力发展机器人产业。根据国际机器人联合会的《2023 世界机器人报告》,2022 年全球在工业领域新增机器人数量超50 万台,其中中国超29 万台,远超欧盟、美国、日本、韩国等其他主要经济体[1]。《“十四五”机器人产业发展规划》指出:未来5 年乃至更长一段时间,是我国机器人产业自立自强、换代跨越的战略机遇期[2]。
随着智能和通信技术的发展,网络化机器人能够在偏远或人难以进入的工作场所进行检查、维护等无人作业,还可用于执行对人类过于危险或过于费力的任务,例如核退役、高压电设备检修、海上风力机的涡轮叶片检修、海上钻井平台检查和维护、未知环境勘探、应急救灾等[3-8],如图1 所示。根据Grand View Research 的研究报告,网络化机器人已经成为一个快速增长的工业市场。2019 年执行远程检测和维护任务的机器人及其它现场机器人的市场规模达到123 亿美元,预计在2020 年至2027 年间将以41.0%的年复合增长率增长[4]。而搬运机器人市场规模在2021 年达到73.4 亿美元,预计在2022 年至2030 年间将以17.4%的年复合增长率增长[9]。《中华人民共和国国民经济和社会发展第十四个五年规划和2035 年远景目标纲要》提出:加强矿山深部开采与重大灾害防治等领域先进技术装备创新应用,推进危险岗位机器人替代[10]。
在偏远、应急救灾等地区,地形复杂、环境恶劣,传统的地面蜂窝网络基础设施难以大规模密集部署。地面基站的覆盖范围往往有限,不可避免地形成覆盖盲区。另一方面,5G 网络的总功耗是4G 网络的12 倍之多[11],而在这些地区,机器人的分布稀疏且范围广,因此常规地面网络的运营成本偏高。
卫星网络能够提供广域覆盖,是一种不依赖地面环境的网络部署策略。然而,卫星通信的传播时延往往较高。根据3GPP(The 3rd Generation Partnership Project,第三代合作伙伴计划)标准[12],从LEO(Low Earth Orbit,低地球轨道)卫星、MEO(Medium Earth Orbit,中地球轨道)卫星、GEO(Geostationary Earth Orbit,地球静止轨道)卫星到用户的传播时延分别为3~15 ms、27~43 ms、120~140 ms。假设其他附加网络延迟总共为5 ms,用户与地面站间的端到端时延在LEO、MEO、GEO 上可能分别高达35 ms、95 ms、285 ms。此外,GEO 卫星Inmarsat-5 可提供5 Mbps 的上传速度[13],Starlink 的LEO 卫星在美国的平均上传速度可达12.04 Mbps,端到端时延为40 ms[14]。然而,根据3GPP 标准[15],机器人视频应用的最大端到端时延为10 ms,同时上行数据速率要大于10 Mbps。当有大量机器人访问卫星网络时,当前卫星系统往往难以支持10 Mbps的上行数据传输速率。另外,车型机器人应用要求卫星网络至少支持25 Mbps 的上传速度[12]。因此,卫星的高传播时延和相对较低的数据传输速率使其难以作为唯一手段迅速满足网络化机器人的应用需求。
无人机可灵活部署、且通信链路传输损耗低,有望弥补卫星通信的不足[16-18]。对于偏远地区、应急救灾等场景下的机器人应用,以卫星、无人机为主体构成的天空地协同网络可为各类机器人提供广域、按需服务。在香农提出的经典开环通信范式下[19],如图2 所示,系统关注发射机到接收机的单向信息传输“管道”,往往不涉及从接收机到发射机的“高层次信息反馈”。当主要服务对象是人时,这一开环通信范式极大简化了系统设计、带来了3G、4G、5G 等通信网络的繁荣发展,也使得提高传输速率一度成为通信系统演进的最核心指标。然而,使用机器人的主要目的是完成各种复杂、危险的任务,不仅需要网络向机器人发送控制指令等信息,还需要机器人向网络反馈其动作、任务完成情况等结果。这需要一种闭环的通信方式,从而增强机器人控制系统的稳定性、准度和精度。

图2 香农建立的经典“开环通信”示意图
为了解决这个问题,受到维纳控制论的启发[20],本文给出了一种能够根据接收到的信息做出动作、并提供高层次反馈的闭环通信模式。在这种通信模式下,如图3所示,天空地协同网络不仅能够根据机器人的需求提供各种网络服务,还可以根据网络资源的分布情况调控机器人的行为,实现网络对用户的“主动导引”,从而大幅提升网络资源效率。与传统开环通信不同,针对机器人及其闭环控制,图3 的闭环通信模式需要在通信资源配置、用户行为控制、闭环理论模型等三个方面重新设计。

图3 基于维纳控制论的“闭环通信”示意图
1 结构化通信资源配置
1.1 传统通信资源配置的基本思路
5G(The Fifth Generation,第五代)等常规网络根据移动用户的数量和需求,给每个用户分配通信资源,从而形成一条独立的通信链路[21-22]。如图4 所示,简单来讲,5G 网络在时域、频域、空域将通信资源划分为多个独立的资源块,通过TDMA(Time Division Multiple Access,时分多址)、FDMA(Frequency Division Multiple Access,频分多址)和SDMA(Space Division Multiple Access,空分多址)等多址技术,将各个资源块分配给不同用户。而且,网络采用FDD(Frequency Division Duplex,频分双工)或TDD(Time Division Duplex,时分双工)方式来区分同一用户的上行链路和下行链路。因此,多址技术和双工技术确保了每个用户的每一条“通信管道”都能获得一条独立的通信链路,本文将其称为用户级通信链路。
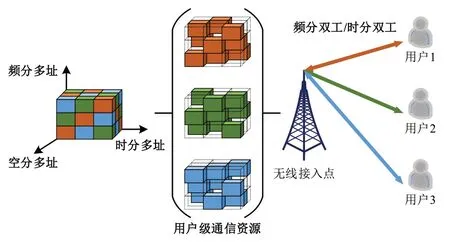
图4 传统网络的用户级通信链路示意图
1.2 机器人无人作业对通信资源配置的特殊需求
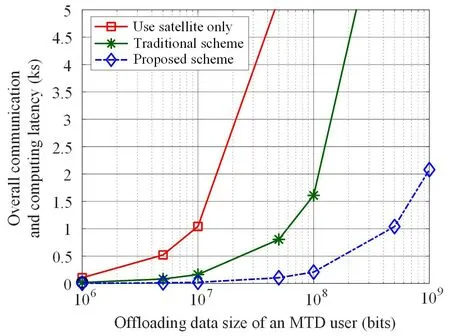
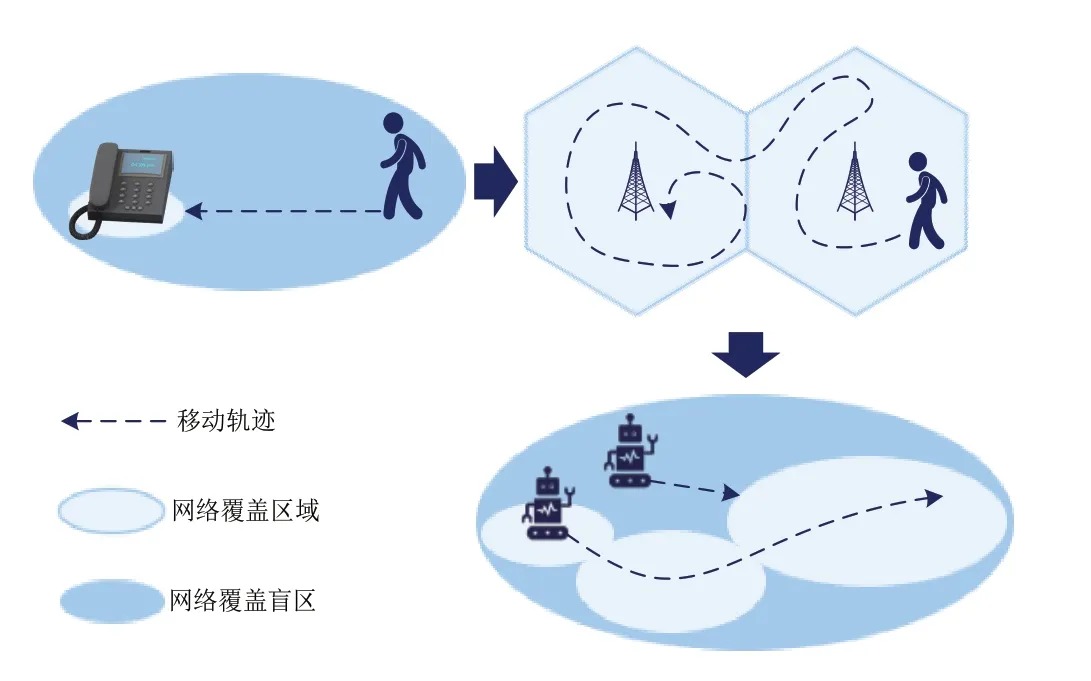
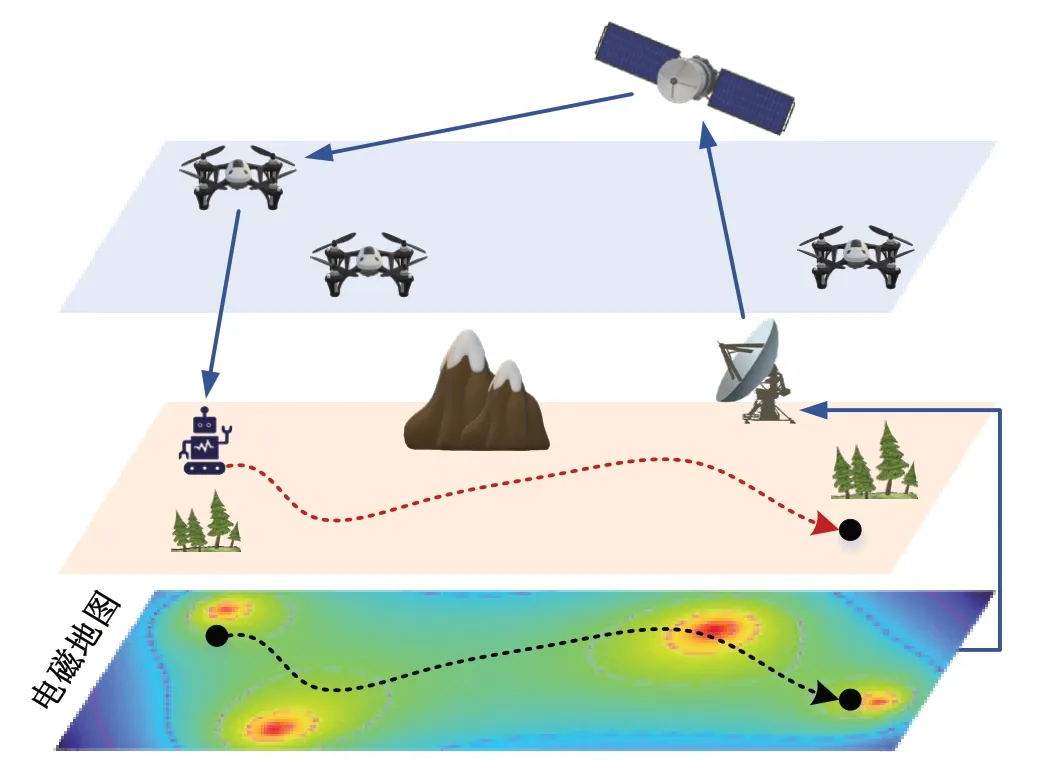
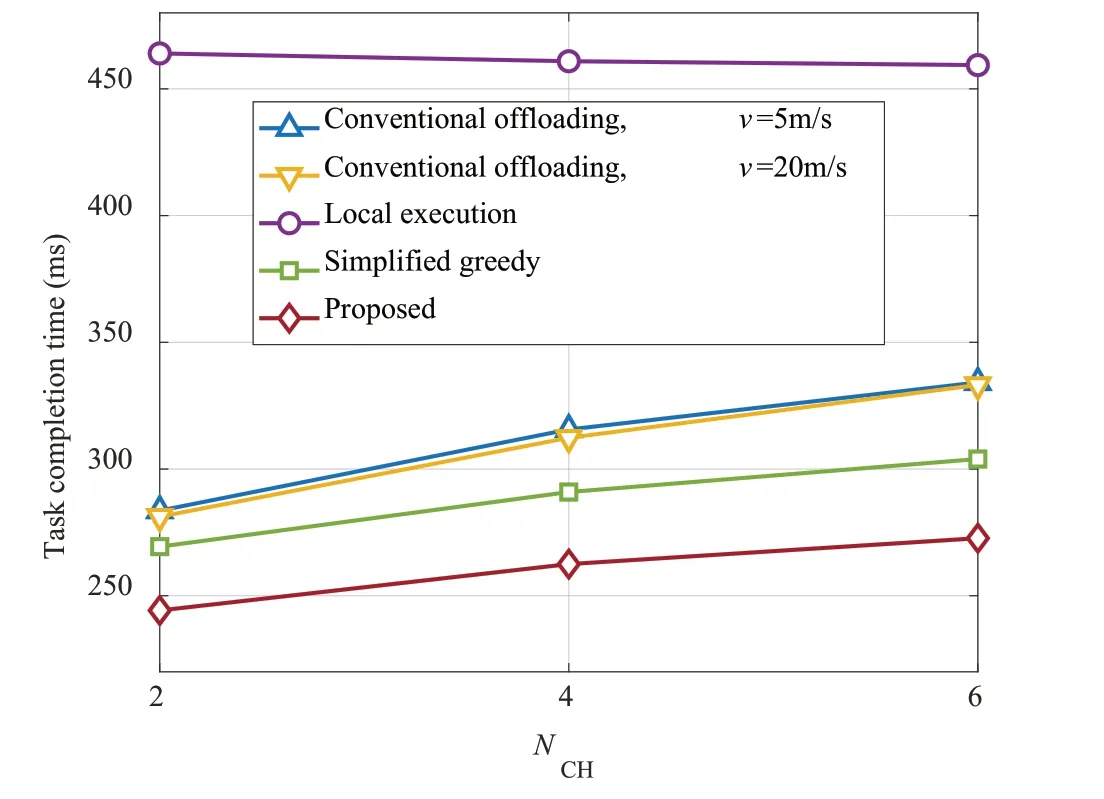
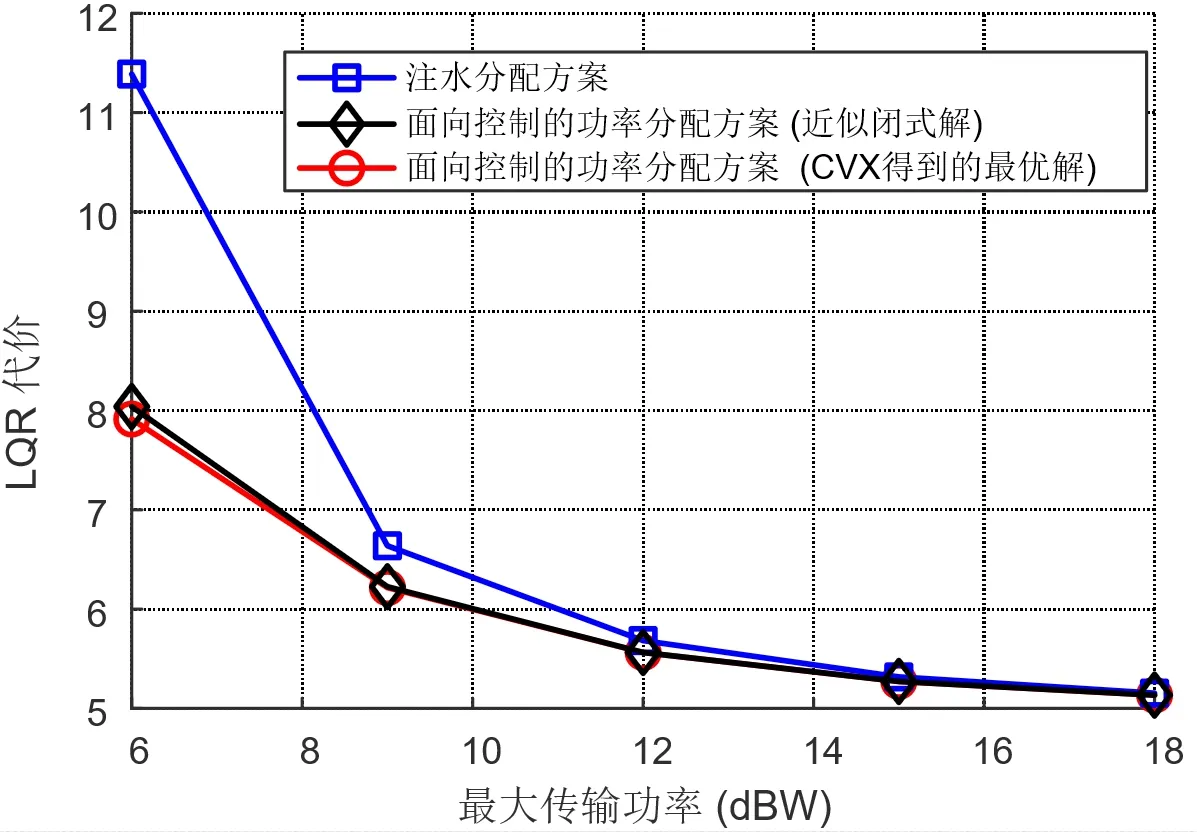
在无人作业中,单个机器人往往难以完成复杂的任务,例如核退役[4]、远程医疗[23]、未知区域勘探[24],通常需要与人类操作员或邻近的多个机器人协同互动,配合完成复杂任务。因此,不同于面向个人用户的传统通信网络,面向机器人的网络需要给一组机器人提供网络服务,这使得面向机器人的网络与传统网络在空时频通信资源的分配和调度方面存在明显差异。以多机器人协作为例,如图5所示,三个机器人R1、R2、R3分别负责感知、计算、操作,通过无线网络协同完成一项任务。不失一般性,假设0 图5 多个机器人通过无线网络协同完成一项任务的示例 图6 展示了多机器人协作时空时频通信资源调配的示意图。网络针对不同功能的机器人采用了不同的通信资源分配策略。例如,由于感知的数据量通常大于计算决策的数据量,因此R1 的上行链路和R2 的下行链路获得了较大的带宽,而R2 的上行链路和R3 的下行链路的带宽较小;当三个机器人在不同位置执行各自的任务时,它们的空域通信资源通常也会有所不同。更重要的是,由于通信资源的调配与任务的执行顺序密切相关,不同机器人间的通信资源调配在空域、时域和频域均具有很强的“高层次任务相关性”。例如,当机器人R1改变位置,观察到任务在其它位置的状态偏离预期时,可能需要机器人R3 改变位置以执行有效的调整动作,这就使得机器人间的空域通信资源调配呈现相关性;通信资源的时间调配顺序通常与任务的执行顺序(如感知-通信-计算-通信-动作)一致;当机器人R1 的感知数据量增加时,其上行链路带宽增加,因此机器人R2 的下行链路带宽也需要相应地增加,这也是“高层次任务相关性”的一种体现。 图6 多机器人协作中空域、时域和频域通信资源调配的相关性及其结构化的示意图 如果通信网络仍然采用传统的资源配置模式,每个机器人将被分配一条独立的通信链路。以机器人R1为例,除了在t1时隙上传感知数据外,其上行链路在其它三个时隙可能会处于空闲状态,这会降低通信资源的整体利用率。虽然认知无线电技术能够在一定程度上缓解该问题[25],但其它机器人可能会带来严重的干扰,不利于机器人协同完成关键任务。如图6 所示,一种潜在的解决方案是根据任务的执行顺序和控制的因果关系,将协作机器人的通信资源调配有机地融合为一个“结构化的整体”,从而建立多条具有“高层次任务相关性”的面向多个机器人的通信链路,本文将其称为面向用户群组的结构化通信链路。 文献[26]初步研究了卫星无人机混合网络中通信和计算资源结构化,利用不同时间尺度结构化通信和计算资源,分时段最小化卸载服务时延。如图7 所示,提出的结构化方法优于只采用卫星的方法。这说明按需调整网络的通信和计算资源最小编排结构,能够有效提高系统性能。而且,提出的结构化方法也优于传统的面向状态的优化方法。这说明即使过程信息受限,提出的结构化方法仍能提供一定的性能增益。 图7 在不同卸载数据量下结构化方法与传统方法的时延对比图 回顾通信发展历史,随着通信网络覆盖方式的演变,用户的移动行为也经历了两次主要变化。在固定电话网络时代,如图8 左上所示,人类用户习惯于“走”到固定电话的位置,然后拿起听筒后拨号接入网络。此时,固定电话在一定程度上起到了引导用户移动行为的作用。进入移动通信网络时代,如图8 右上所示,蜂窝基站的密集部署实现了对指定区域的全覆盖,使得人类用户可以在网络覆盖区域内自由移动,无缝地连接网络,“随时”享受网络服务。 图8 固定电话网络、蜂窝网络和天空地协同网络的覆盖方式和用户移动行为的对比图 在偏远、危险或人口稀少的地区,天空地协同网络为机器人提供服务时,低轨卫星和无人机的移动为网络的无缝覆盖带来挑战。复杂的地形环境、大气雨衰等也可能屏蔽或衰减无线电信号,导致宽带覆盖盲区。如果机器人进入覆盖盲区,网络服务中断,机器人可能失去控制。然而,机器人与人类不同,其移动性是可以被主动调控的。受到固定电话网络引导用户移动行为的启示,一种潜在方案是让网络根据其覆盖情况来调控机器人的移动行为,而不再仅仅执着于提升网络的覆盖能力。如图8 右下所示,根据网络预先设定的移动路径,机器人可以从覆盖盲区快速且准确地移动到有网络覆盖的区域,在覆盖范围内实现网络接入并完成任务。根据文献[27]提出的电磁地图概念,图9 展示了一个天空地协同网络通过电磁地图调控机器人在偏远地区移动行为的示例。网络首先根据卫星和无人机的部署情况生成电磁地图,然后根据电磁地图中无线电信号在各区域的强度分布,提前规划机器人的运动轨迹。规划的运动轨迹通过天空地协同网络传送至机器人,引导机器人从起点移动至终点。这个过程并不严格避免机器人进入盲区,而是“主动”规划,虽然有时机器人进入了盲区,但网络预先知道,并预先规划了相应的任务完成计划和移动路径,不会出现失联等情况。 图9 天空地协同网络使用电磁地图导引机器人在偏远地区移动的示例 文献[28]通过将电磁地图中信号的强弱分布简化为覆盖区域的无线通信是否可用,研究了机器人的移动行为对卫星地面混合网络卸载性能的影响,建立了机器人速度控制和网络卸载判决的联合优化问题。如图10所示,基于对机器移动速度的调控,提出方法的卸载性能优于传统卸载方法(conventional offloading)、贪婪方法(simplified greedy)、本地执行方法(local execution),有助于降低面向机器人的星地混合网络的服务延迟。 图10 不同无线通信不可用覆盖区域数量NCH下卸载完成时间的对比图 网络化机器人的高效运作依赖于数据感知和共享、逻辑推理以及控制指令的确定性执行[6-29]。这些功能通过感知、通信、计算和控制的融合,实现对机器人的安全和可靠的闭环控制。根据相关研究报告[4],为了使网络化机器人能够完成复杂任务,一方面需借助多种设备和方法赋予机器人感知能力。具体来说,摄像头和作业环境监测方法尤为关键。例如,摄像头需具备360°视野、平移– 倾斜– 变焦的能力,能产生RGB 深度图、红外照明、纵深等功能,而环境监测则需要多种传感器的支持,包含温度、湿度、气体泄漏(如甲烷)、振动和声音(麦克风)等。另一方面,为了确保机器人在工作场所能及时采取行动并可靠运行,机器人的控制回路中需加入三个功能:1)实时计算机视觉:基于边缘AI(Artificial Intelligence,人工智能)和ML(Machine Learning,机器学习),对周围环境和任务的当前状态、危险程度、异常等事件进行识别,并对障碍、地形等进行检测;2)实时校准:针对机器人的操作异常、移动控制与输入指令失配等问题,通过重新校准,不断修正机器人的感知精度,并需要定期升级控制软件和病毒检测程序;3)日志实时分析:结合国家和行业的法律法规,追踪机器人的潜在安全隐患,从而进行预测性维护。所以,在网络化机器人的控制环路中,通信网络并非仅将机器人简单连接起来,而是需要整合感知、计算、控制不同环节。以机械臂操控为例[30],为了让机械臂按设计动作执行,将指令翻译成驱动机器人运动的命令会占用一定时间。当这个控制时间较长时,仅优化通信时延并不能有效降低网络化机器人控制的端到端时延,这需要感-传-算-控闭环的系统模型。 在5G 网络中,以机器为服务对象的通信场景开始兴起,比如URLLC(Ultra-Reliable and Low Latency Communications,超可靠低时延通信)和mMTC(massive Machine Type Communications,大规模机器类通信)[31]。然而,在这些通信场景中,网络仍没有考虑机器人闭环控制中必要的感知、计算等因素。6G(The Sixth Generation,第六代)网络也提出了两个以机器为中心的场景,包括IAIC(Integrated AI and Communication,集成人工智能和通信)和ISAC(Integrated Sensing and Communication,集成感知和通信)[32]。这两个场景分别侧重计算与通信的融合、感知与通信的融合。此外,在控制、通信两个学科相对独立发展的今天,当前的机器人控制算法通常不将通信网络的输出作为其闭环控制的输入,而是简化或忽略关于通信的假设或条件。例如,多机器人的控制算法通常假设精确的时间同步[5],这会对机器人的最大通信时延施加固定的时间约束。然而,当前的通信网络采用了“尽力而为”的信息传输模式,尚难以满足严格的大规模固定通信时间要求。 在感-传-算-控闭环系统模型中,虽然已经存在能够单独描述感知、通信、计算和控制性能的数学模型,例如通信的香农熵[19]和控制系统的内禀熵率[33],但感知、通信、计算和控制之间的定量关系尚未确定,缺乏统一的系统度量来刻画机器人的闭环控制性能。依托图3 所示的闭环信息传输架构模型,进一步整合环境和目标任务的感知、感知数据的计算、以及感知数据和控制指令的传输,有望找到以“熵匹配”为核心的闭环数学模型。这里“熵匹配”从消除不确定性角度统一感知、通信、计算和控制不同环节。文献[34]在理想感知和计算的假设下,通过分析卫星无人机混合网络的通信能力和机器人控制参数对总体闭环控制性能的影响,初步探究了面向整体闭环控制性能的通信资源分配方法。基于感-传-算-控的控制环路,建立了以LQR(Linear Quadratic Regulator,线性二次型调节器)为代价函数和以通信速率为约束条件的优化模型。如图11 所示,相比传统的注水功率分配方案,提出的面向控制的功率分配方案具有更低的系统代价。这初步说明基于“熵匹配”的闭环数学模型有助于改善机器人系统的性能。 图11 不同功率分配方案得到的LQR代价 尽管如此,机器人是一个跨学科的研究领域,涵盖电子工程、计算机科学、机械工程、生物学、认知科学等多个学科。因此,利用熵对异构信息进行统一度量还需要多学科的交叉融合。 针对偏远、应急救灾等地区的无人作业需求,受到维纳的控制论启发,提出了一种天空地协同网络闭环通信新架构。新架构可认知并利用机器与人行为模式的差异,将多个机器人组成一个用户群组,通过“高层次任务相关”的结构化通信资源调配,提高系统整体资源效率。新架构可根据当前网络基础设施部署和网络资源分布的情况,主动调控机器人的行为(如位置管理、移动速度控制等),避免“单向”提升网络性能,遭遇通信资源的“边际效应”,造成资源浪费。新架构支持感知、通信、计算、控制的闭环运转,以“熵匹配”为途径,实现异构信息环节的统一度量。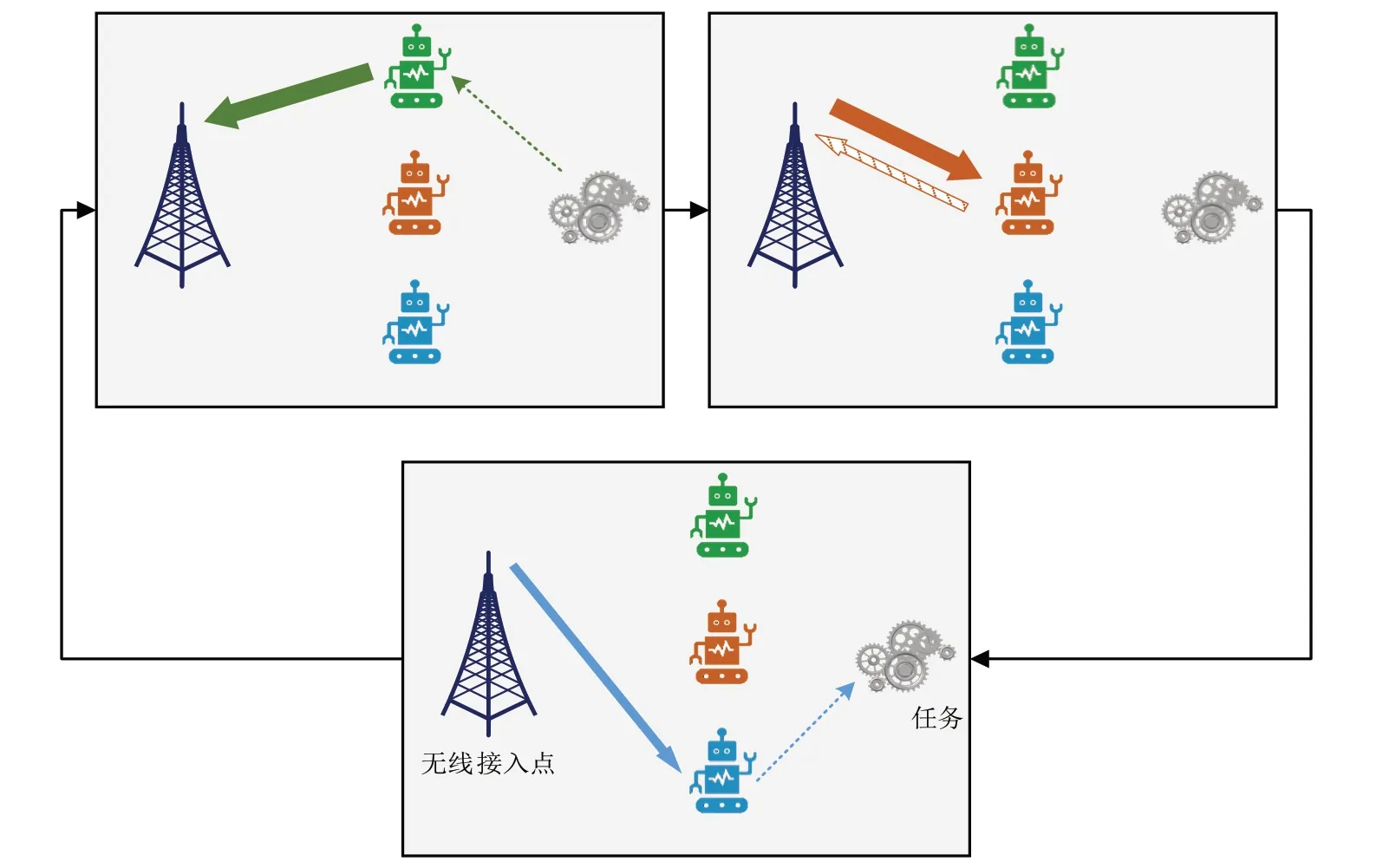
1.3 面向机器群组的结构化通信资源配置方法

2 机器人主动行为调控
2.1 通信网络中用户移动行为发展概况
2.2 面向机器的主动行为调控方法
3 感-传-算-控闭环系统模型
3.1 机器作业中的感-传-算-控闭环需求
3.2 感-传-算-控闭环系统模型发展展望
4 结束语
猜你喜欢
纺织科学研究(2023年9期)2023-10-23
移动通信(2021年5期)2021-10-25
电子制作(2019年23期)2019-02-23
测控技术(2018年6期)2018-11-25
黑龙江电力(2017年1期)2017-05-17
环境科技(2016年5期)2016-11-10
系统工程与电子技术(2016年7期)2016-08-21
电测与仪表(2016年17期)2016-04-11
系统工程学报(2015年2期)2015-02-28
电网与清洁能源(2015年2期)2015-02-28
